


Billion Tree Tsunami Forests Classification Using Image Fusion Technique and Random Forest Classifier Applied to Sentinel-2 and Landsat-8 Images: A Case Study of Garhi Chandan Pakistan

Abstract
:1. Introduction
1.1. Satellite Missions
1.2. Image Classification
1.3. Image Fusion
1.4. Billion Tree Tsunami Project
- The land cover changes in the study area as a result of Billion Tree Tsunami project are relatively unexplored. In this article, data collected from four years (2016, 2018, 2020 and 2022) from our study area from Sentinel-2 satellites are classified and the respective land cover changes are calculated.
- Prior to classification, Sentinel-2 and Landsat 8 OLI images are combined using a model-based approach presented in [49]. As a result of image fusion, all 60 m, 30 m and 20 m bands are sharpened to 10 m spatial resolution for both Sentinel-2 and Landsat 8. However, in this research work, the Sentinel-2 sharpened images are utilized for classification purposes.
- A post classification statistical analysis of the classified images is presented using the concepts presented in [50] and by utilizing the semi-automatic classification plugin (SCP) [51]. Using statistical analysis, an accuracy assessment for the classified images is obtained and the overall assessment accuracies and Kappa hat parameters are calculated.
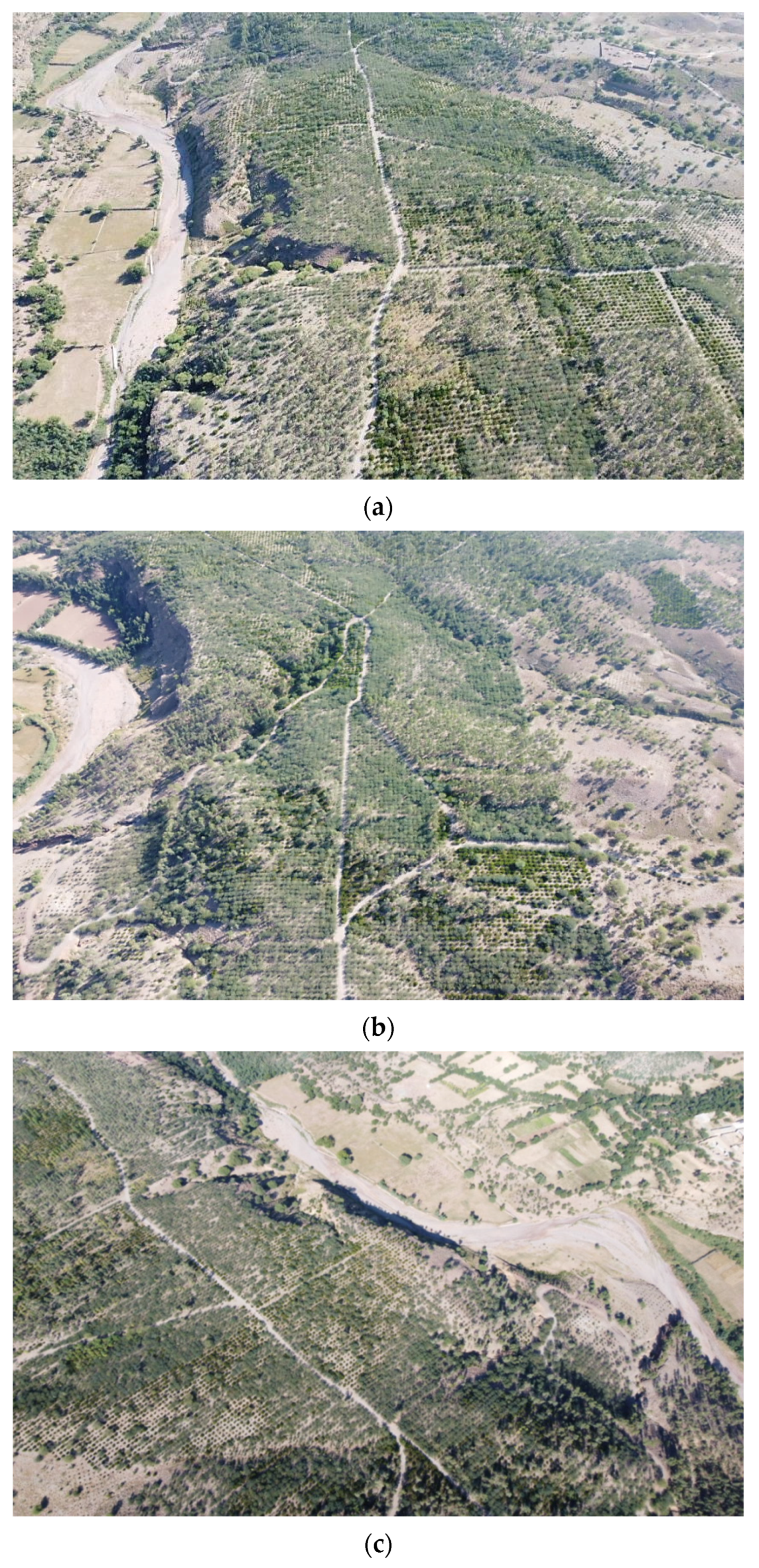
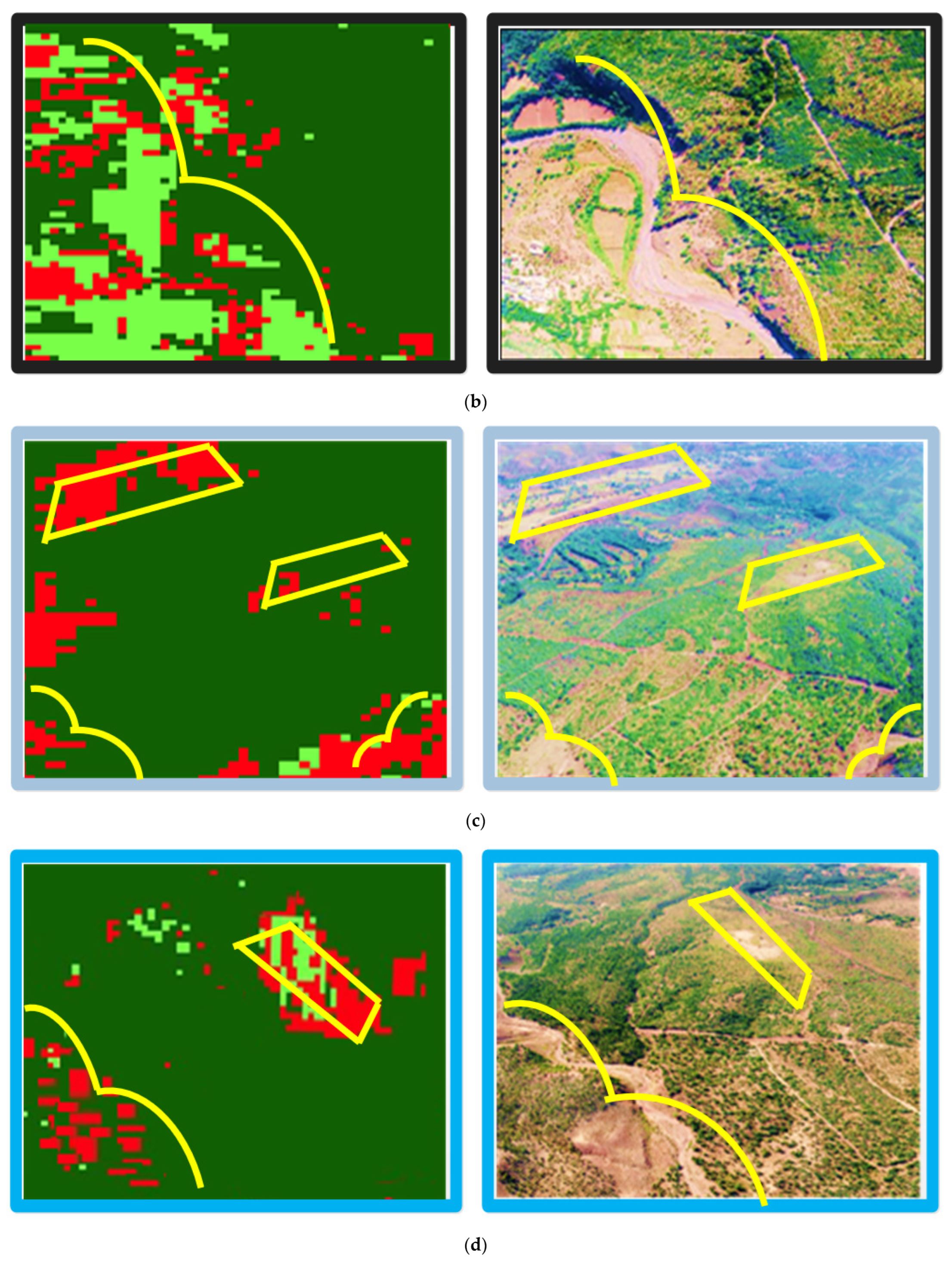
- Using an UAV drone, ground images are recorded for the classified image of the year 2022 and compared. A total of four sample areas are chosen within the total area of the classified image, and the coordinates of the sample areas are noted from the classified image and open street map. The ground images collected from the UAV are preprocessed and geo-referenced using MATLAB for its comparison with the classified image.
2. Materials and Methods
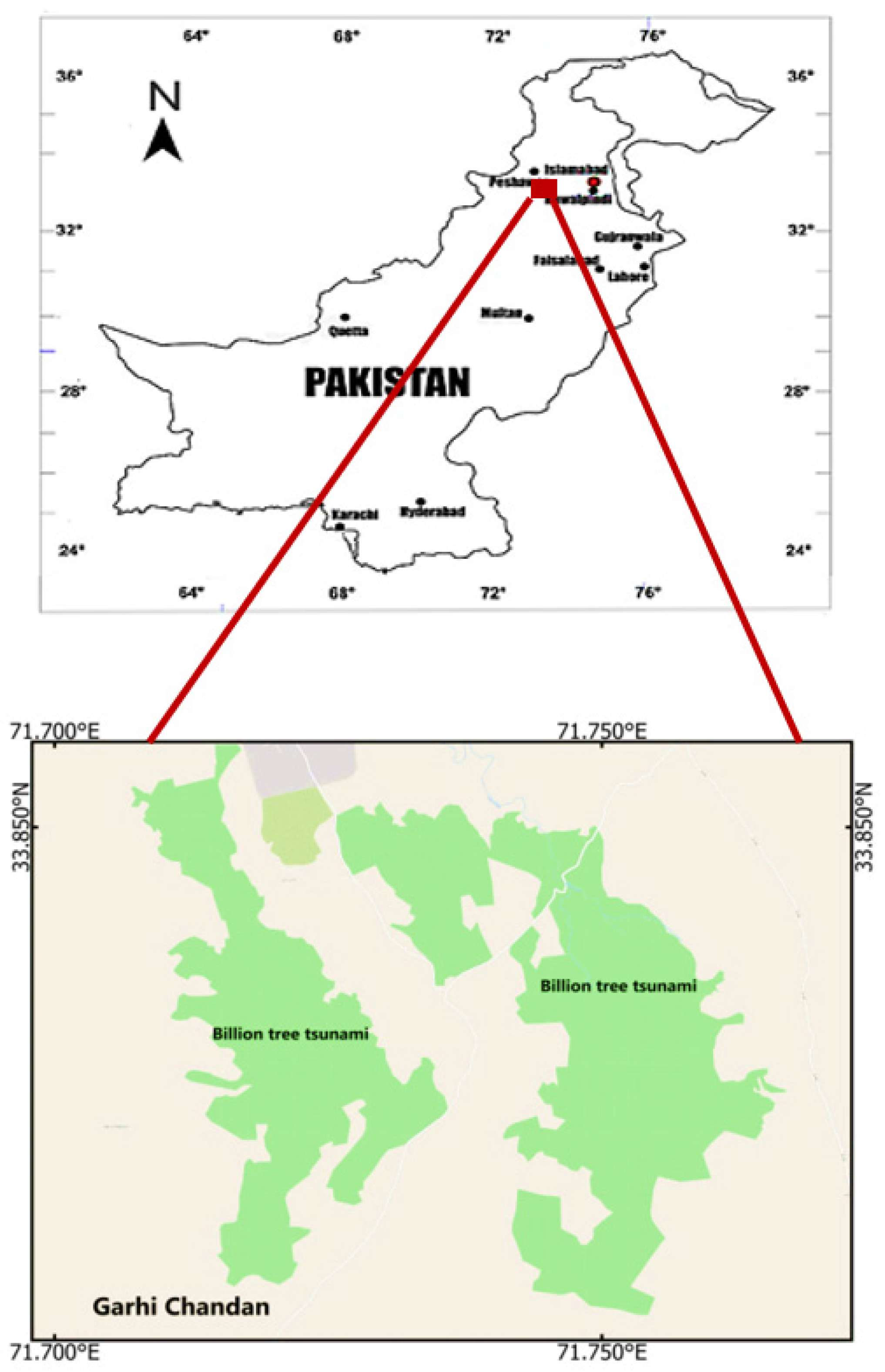
2.1. Study Area
2.2. Image Fusion and Sharpening
2.3. Supervised Classification
2.4. Accuracy Assessment
2.5. Ground Data Sampling Using UAV
3. Results
3.1. Image Sharpening
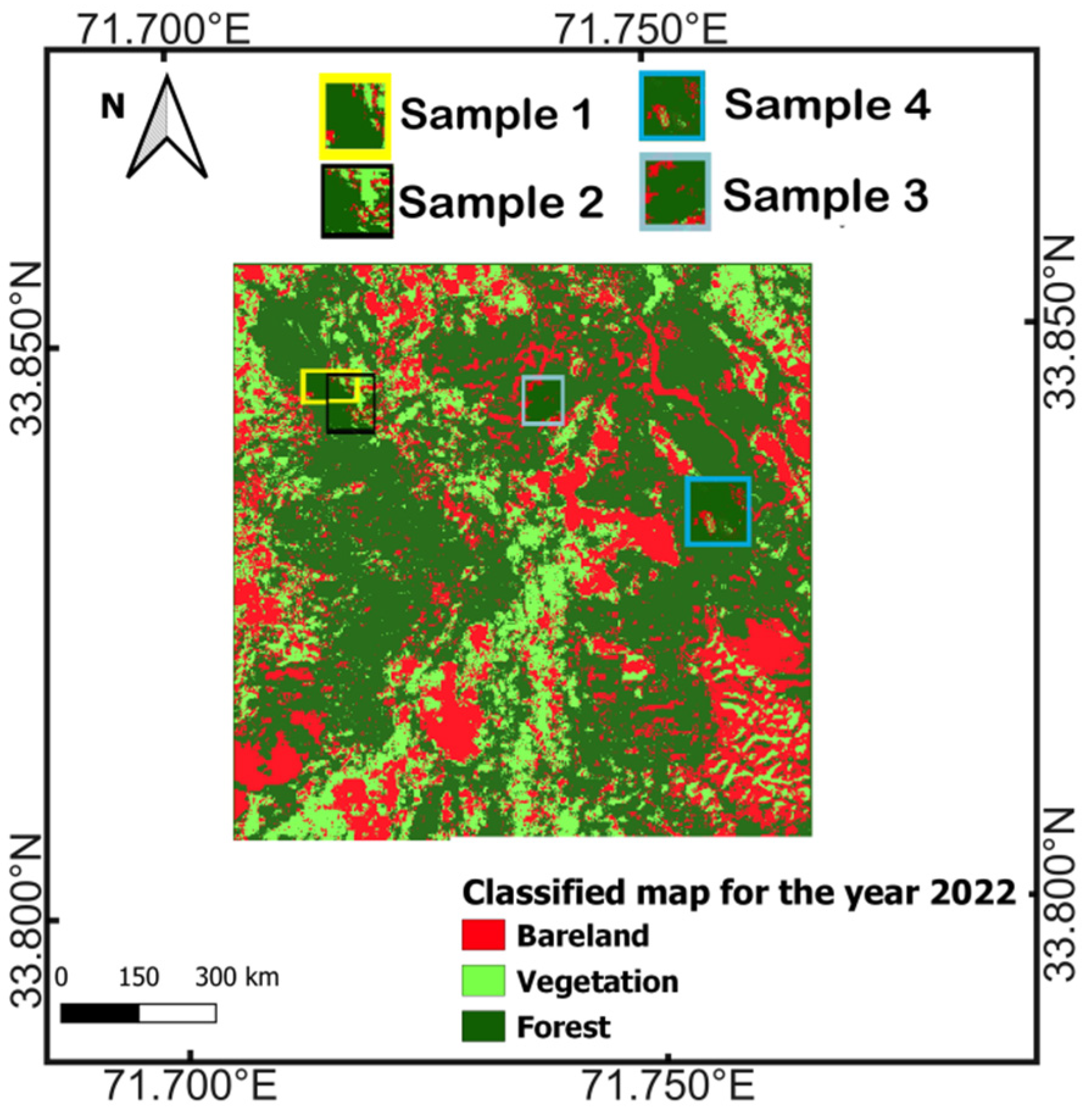
3.2. Image Classification
3.3. Accuracy Assessment
3.4. Change Map of the Study Area for the Years 2016–2022
3.5. Ground Data Matching
4. Discussions
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hansen, M.C.; DeFries, R.; Townshend, J.R.; Sohlberg, R. Global land cover classification at 1 km spatial resolution using a classification tree approach. Int. J. Remote Sens. 2000, 21, 1331–1364. [Google Scholar] [CrossRef]
- Hosonuma, N.; Herold, M.; De Sy, V.; De Fries, R.S.; Brockhaus, M.; Verchot, L.; Angelsen, A.; Romijn, E. An assessment of deforestation and forest degradation drivers in developing countries. Environ. Res. Lett. 2012, 7, 44009. [Google Scholar] [CrossRef]
- Phiri, D.; Morgenroth, J.; Xu, C. Long-term land cover change in Zambia: An assessment of driving factors. Sci. Total Environ. 2019, 697, 134206. [Google Scholar] [CrossRef] [PubMed]
- Jucker, T.; Caspersen, J.; Chave, J.; Antin, C.; Barbier, N.; Bongers, F.; Dalponte, M.; van Ewijk, K.Y.; Forrester, D.I.; Haeni, M.J.G.C.B. Allometric equations for integrating remote sensing imagery into forest monitoring programmes. Glob. Chang. Biol. 2017, 23, 177–190. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Haack, B.N. Landsat: A tool for development. World Dev. 1982, 10, 899–909. [Google Scholar] [CrossRef]
- Turner, W.; Rondinini, C.; Pettorelli, N.; Mora, B.; Leidner, A.K.; Szantoi, Z.; Buchanan, G.; Dech, S.; Dwyer, J.; Herold, M. Free and open-access satellite data are key to biodiversity conservation. Biol. Conserv. 2015, 182, 173–176. [Google Scholar] [CrossRef] [Green Version]
- Denize, J.; Hubert-Moy, L.; Corgne, S.; Betbeder, J.; Pottier, E. Identification of winter land use in temperate agricultural landscapes based on Sentinel-1 and 2 Times-Series. In Proceedings of the IGARSS 2018-2018, IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 8271–8274. [Google Scholar]
- Immitzer, M.; Vuolo, F.; Atzberger, C. First Experience with Sentinel-2 data for crop and tree species classifications in Central Europe. Remote Sens. 2016, 8, 166. [Google Scholar] [CrossRef]
- ESA. Sentinel-2 Missions-Sentinel Online; ESA: Paris, France, 2014. [Google Scholar]
- Lu, D.; Weng, G. A survey of image classification methods and techniques for improving classification performance. Int. J. Remote Sens. 2004, 28, 823–870. [Google Scholar] [CrossRef]
- Landgrebe, D.A. Signal Theory Methods in Multispectral Remote Sensing; John Wiley: Hoboken, NJ, USA, 2003. [Google Scholar]
- Chen, K.S.; Tzeno, Y.C.; Chen, C.F.; Kao, W.I. Land cover classification of multispectral imagery using dynamic learning neural network. Photogramm. Eng. Remote Sens. 1995, 81, 403–408. [Google Scholar]
- Foody, G.M. Supervised classification by MLP and RBN neural networks with and without an exhaustive defined set of classes. Int. J. Remote Sens. 2004, 5, 3091–3104. [Google Scholar] [CrossRef]
- Huang, W.Y.; Lippmann, R.P. Neural Net and Traditional Classifiers. In Neural Information Processing Systems; American Institute of Physics: College Park, MD, USA, 1988; pp. 387–396. [Google Scholar]
- Eberlein, S.J.; Yates, G.; Majani, E. Hierarchical multisensor analysis for robotic exploration. In Proceedings of the SPIE 1388, Mobile Robots, Advances in Intelligent Robotics Systems, Boston, MA, USA, 4–9 November 1990; Volume 578, pp. 578–586. [Google Scholar]
- Cleeremans, A.; Servan-Schreiber, D.; McClelland, J.L. Finite State Automata and Simple Recurrent Networks. Neural Comput. 1989, 1, 372–381. [Google Scholar] [CrossRef]
- Decatur, S.E. Application of neural networks to terrain classification. In Proceedings of the International Joint Conference on Neural Networks, Washington, DC, USA, 18–22 June 1989; Volume 1, pp. 283–288. [Google Scholar]
- Kulkarni, A.D.; Lulla, K. Fuzzy Neural Network Models for Supervised Classification: Multispectral Image Analysis. Geocarto Int. 1999, 14, 42–51. [Google Scholar] [CrossRef]
- Laprade, R.H. Split-and-merge segmentation of aerial photographs. Comput. Vis. Graph. Image Process. 1988, 44, 77–86. [Google Scholar] [CrossRef]
- Hathaway, R.J.; Bezdek, J.C. Recent convergence results for the fuzzy c-means clustering algorithms. J. Classification 1988, 5, 237–247. [Google Scholar] [CrossRef]
- Pal, S.K.; De, R.K.; Basak, J. Unsupervised Feature Evaluation: A Neuro-Fuzzy Approach. IEEE Trans. Neural Netw. 2000, 11, 366–376. [Google Scholar] [CrossRef] [Green Version]
- Kulkarni, A.; McCaslin, S. Knowledge Discovery From Multispectral Satellite Images. IEEE Geosci. Remote Sens. Lett. 2004, 1, 246–250. [Google Scholar] [CrossRef]
- Mountrakis, G.; Im, J.; Ogole, C. Support vector machines in remote sensing: A Review. Int. J. Photogramm. Remote Sens. 2011, 60, 247–259. [Google Scholar] [CrossRef]
- Mantero, P.; Moser, G.; Serpico, S.B. Partially supervised classification of remote sensing images through–SVM-based probability density estimation. IEEE Trans. Geosci. Remote Sens. 2005, 43, 559–570. [Google Scholar] [CrossRef]
- Mitra, P.; Shankar, B.U.; Pal, S.K. Segmentation of multispectral remote sensing images using active support vector machines. Pattern Recognit. Lett. 2004, 25, 1067–1074. [Google Scholar] [CrossRef]
- Hansen, R.M.; Dubayah, R.; DeFries, R. Classification trees: An alternative to traditional land cover classifiers. Int. J. Remote Sens. 1990, 17, 1075–1081. [Google Scholar] [CrossRef]
- Ghose, M.K.; Pradhan, R.; Ghose, S. Decision tree classification of remotely sensed satellite data using spectral separability matrix. Int. J. Adv. Comput. Sci. Appl. 2010, 1, 93–101. [Google Scholar]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Gislason, P.O.; Benediktsson, J.A.; Sveinsson, J.R. Random forest for land cover classification. Pattern Recognit. Lett. 2006, 27, 294–300. [Google Scholar] [CrossRef]
- Geetha, V.; Punitha, A.; Abarna, M.; Akshaya, M.; Illakiya, S.; Janani, A.P. An Effective Crop Prediction Using Random Forest Algorithm. In Proceedings of the 2020 International Conference on System, Computation, Automation and Networking (ICSCAN), Pondicherry, India, 3–4 July 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Pelletier, C.; Valero, S.; Inglada, J.; Champion, N.; Dedieu, G. Assessing the robustness of Random Forests to map land cover with high resolution satellite image time series over large areas. Remote Sens. Environ. 2016, 187, 156–168. [Google Scholar] [CrossRef]
- Belgiu, M.; Drăgu¸t, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Pallagani, V.; Khandelwal, V.; Chandra, B.; Udutalapally, V.; Das, D.; Mohanty, S.P. dCrop: A Deep-Learning Based Framework for Accurate Prediction of Diseases of Crops in Smart Agriculture. In Proceedings of the 2019 IEEE International Symposium on Smart Electronic Systems (iSES) (Formerly iNiS), Rourkela, India, 16–18 December 2019; pp. 29–33. [Google Scholar] [CrossRef]
- Rodriguez-Galiano, V.F.; Ghimire, B.; Rogan, J.; Chica-Olmo, M.; Rigol-Sanchez, J.P. An assessment of the effectiveness of a random forest classifier for land-cover classification. ISPRS J. Photogramm. Remote Sens. 2012, 67, 93–104. [Google Scholar] [CrossRef]
- Ma, L.; Li, M.; Ma, X.; Cheng, L.; Du, P.; Liu, Y. A review of supervised object-based land-cover image classification. ISPRS J. Photogramm. Remote Sens. 2017, 130, 277–2933. [Google Scholar] [CrossRef]
- Malenovský, Z.; Rott, H.; Cihlar, J.; Schaepman, M.E.; García-Santos, G.; Fernandes, R.; Berger, M. Sentinels for science: Potential of Sentinel-1, -2, and -3 missions for scientific observations of ocean, cryosphere, and land. Remote Sens. Environ. 2012, 120, 91–101. [Google Scholar] [CrossRef]
- Korhonen, L.; Packalen, P.; Rautiainen, M. Comparison of Sentinel-2 and Landsat 8 in the estimation of boreal forest canopy cover and leaf area index. Remote Sens. Environ. 2017, 195, 259–274. [Google Scholar] [CrossRef]
- Pesaresi, M.; Corbane, C.; Julea, A.; Florczyk, A.J.; Syrris, V.; Soille, P. Assessment of the added-value of Sentinel-2 for detecting built-up areas. Remote Sens. 2016, 8, 299. [Google Scholar] [CrossRef]
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P.; et al. Sentinel-2: ESA’s Optical High-Resolution Mission for GMES Operational Services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- USGS EROS Archive—Sentinel-2—Comparison of Sentinel-2 and Landsat. Available online: https://www.usgs.gov/centers/eros/science/usgs-eros-archive-sentinel-2-comparison-sentinel-2-and-landsat (accessed on 26 October 2022).
- Drakonakis, G.I.; Tsagkatakis, G.; Fotiadou, K.; Tsakalides, P. OmbriaNet—Supervised Flood Mapping via Convolutional Neural Networks Using Multitemporal Sentinel-1 and Sentinel-2 Data Fusion. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 2341–2356. [Google Scholar] [CrossRef]
- Hafner, S.; Nascetti, A.; Azizpour, H.; Ban, Y. Sentinel-1 and Sentinel-2 Data Fusion for Urban Change Detection Using a Dual Stream U-Net. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Chen, Y.; Bruzzone, L. Self-Supervised SAR-Optical Data Fusion of Sentinel-1/-2 Images. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–11. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, H.K.; Roy, D.P.; Yan, L.; Huang, H. Sharpening the Sentinel-2 10 and 20 m Bands to Planetscope-0 3 m Resolution. Remote Sens. 2020, 12, 2406. [Google Scholar] [CrossRef]
- Clerici, N.; Calderon, C.A.V.; Posada, J.M. Fusion of Sentinel-1A and Sentinel-2A data for land cover mapping: A case study in the lower Magdalena region, Colombia. J. Maps 2017, 13, 718–726. [Google Scholar] [CrossRef] [Green Version]
- Ma, Y.; Chen, H.; Zhao, G.; Wang, Z.; Wang, D. Spectral Index Fusion for Salinized Soil Salinity Inversion Using Sentinel-2A and UAV Images in a Coastal Area. IEEE Access 2020, 8, 159595–159608. [Google Scholar] [CrossRef]
- Ao, Z.; Sun, Y.; Xin, Q. Constructing 10 m NDVI Time Series from Landsat 8 and Sentinel 2 Images Using Convolutional Neural Networks. IEEE Geosci. Remote Sens. Lett. 2020, 18, 1461–1465. [Google Scholar] [CrossRef]
- Shao, Z.; Cai, J.; Fu, P.; Hu, L.; Lui, T. Deep learning-based fusion of Landsat-8 and Sentinel-2 images for a harmonized surface reflectance product. Remote Sens. Environ. 2019, 235, 111425. [Google Scholar] [CrossRef]
- Sigurdsson, J.; Armannsson, S.E.; Ulfarsson, M.O.; Sveinsson, J.R. Fusing Sentinel-2 and Landsat 8 Satellite Images Using a Model-Based Method. Remote Sens. 2022, 14, 3224. [Google Scholar] [CrossRef]
- Olofsson, P.; Foody, G.M.; Herold, M.; Stehman, S.V.; Woodcock, C.E.; Wulder, M.A. Good practices for estimating area and assessing accuracy of land change. Remote Sens. Environ. 2014, 148, 42–57. [Google Scholar] [CrossRef]
- Congedo, Luca, Semi-Automatic Classification Plugin: A Python tool for the download and processing of remote sensing images in QGIS. J. Open Source Softw. 2021, 6, 3172. [CrossRef]
- Ahmad, A.; Ahmad, S.R.; Gilani, H.; Tariq, A.; Zhao, N.; Aslam, R.W.; Mumtaz, F. A Synthesis of Spatial Forest Assessment Studies Using Remote Sensing Data and Techniques in Pakistan. Forests 2021, 12, 1211. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ANN | Decision Tree | Random Forest |
|---|---|---|
| The precision of the estimation depends on several factors such as increasing number of hidden layers, changing activation function and weights initialization | Suffers from over fitting if it is allowed to grow without control | Over fitting is addressed by taking the average of several decision trees or with most voting |
| Multi-layer neural networks are computationally costly and thus slow | Single tree is faster in computation | Multi decision tree requires relatively high computational power |
| Selection of hidden layers, weights and activation function is to be done manually or some other optimization techniques will be required | Fixed set of rules are required for prediction | Random buildup of decision trees and output is calculated based on average of several trees or majority voting |
| Sub Sample 1 | Sub Sample 2 | Sub Sample 3 | Sub Sample 4 | |
|---|---|---|---|---|
| North | 3,748,570 | 3,748,530 | 3,748,510 | 3,747,530 |
| South | 3,748,230 | 3,747,940 | 3,748,020 | 3,746,850 |
| East | 751,650 | 751,790 | 753,620 | 755,430 |
| West | 751,060 | 751,310 | 753,210 | 754,790 |
| (L × W) m2 | 590 × 340 | 480 × 590 | 410 × 490 | 640 × 680 |
| Centroid | 295,170 | 240,295 | 205,245 | 320,340 |
| Sub Sample 1 | Sub Sample 2 | Sub Sample 3 | Sub Sample 4 | |
|---|---|---|---|---|
| rs (m) | 295 | 240 | 205 | 320 |
| rm(m) | 500 | 400 | 400 | 500 |
| Φ (degrees) | 83 | 83 | 83 | 83 |
| ρ (degrees)-xb | −10 | −10 | −15 | −15 |
| ρ (degrees)-h | 80 | 80 | 75 | 75 |
| h (m) | 628.5 | 502.8 | 604.3 | 755.4 |
| ERGAS | RMSE | SAM | |
|---|---|---|---|
| 20 m | 7.1 | 0.001 | 7.05 |
| 30 m | 1.23 | 0 | 1.23 |
| 60 m | 0.47 | 0 | 0 |
| SRE | SSIM | UIQI | |
|---|---|---|---|
| Band 5-S (20 m) | 13.12 | 0.88 | 0.50 |
| Band 6-S (20 m) | 14.14 | 0.89 | 0.50 |
| Band 7-S (20 m) | 14.27 | 0.89 | 0.55 |
| Band 8A-S (20 m) | 14.19 | 0.89 | 0.55 |
| Band 11-S(20 m) | 14.37 | 0.86 | 0.47 |
| Band 12-S(20 m) | 13.89 | 0.82 | 0.45 |
| Band 8-L(20 m) | 13.45 | 0.92 | 0.68 |
| Average | 13.918 | 0.8786 | 0.5286 |
| Band 1-L (30 m) | 11.01 | 0.89 | 0.62 |
| Band 2-L (30 m) | 11.31 | 0.86 | 0.69 |
| Band 3-L (30 m) | 13.33 | 0.87 | 0.69 |
| Band 4-L (30 m) | 13.43 | 0.87 | 0.67 |
| Band 5-L (30 m) | 15.05 | 0.85 | 0.68 |
| Band 6-L (30 m) | 14.46 | 0.81 | 0.66 |
| Band 7-L (30 m) | 12.37 | 0.81 | 0.60 |
| Average | 12.99 | 0.8514 | 0.6586 |
| Band 1-S (60 m) | 15.57 | 0.91 | 0.72 |
| Band 9-S (60 m) | 15.86 | 0.85 | 0.68 |
| Average | 15.71 | 0.88 | 0.70 |
| Year 2022 | |||
| Class | Pixel Sum | Percentage % | Area (×106 m2) |
| 1. Forest | 177,669 | 56.553 | 17.7669 |
| 2. Bare land | 79,766 | 25.390 | 7.97660 |
| 3. Vegetation | 56,725 | 18.157 | 5.67250 |
| Year 2020 | |||
| Class | Pixel sum | Percentage % | Area (×106 m2) |
| 1. Forest | 113,858 | 36.502 | 11.4675 |
| 2. Bare land | 158,051 | 50.670 | 15.9186 |
| 3. Vegetation | 402,979 | 12.827 | 4.0298 |
| Year 2018 | |||
| Class | Pixel sum | Percentage % | Area (×106 m2) |
| 1. Forest | 69,337 | 22.070 | 6.9337 |
| 2. Bare land | 180,561 | 57.474 | 18.0561 |
| 3. Vegetation | 64,262 | 20.455 | 6.4262 |
| Year 2016 | |||
| Class | Pixel sum | Percentage % | Area (×106 m2) |
| 1. Forest | 30,047 | 9.564 | 3.0047 |
| 2. Bare land | 227,790 | 72.507 | 22.7790 |
| 3. Vegetation | 56,323 | 17.928 | 5.6323 |
| Year 2022 | |||
|---|---|---|---|
| Class | Average | ||
| 1. Forest | 147 | 87 | 117 |
| 2. Bare land | 66 | 86 | 76 |
| 3. Vegetation | 47 | 87 | 67 |
| Total | 260 | 260 | 260 |
| Area Based Error Matrix for the Classified Data of the Year 2022 | ||||
|---|---|---|---|---|
| Classified | Reference | |||
| 1. Forest | 2. Bare land | 3. Vegetation | ||
| 1. Forest | 0.5442 | 0.0142 | 0.0071 | |
| 2. Bare land | 0.0092 | 0.2354 | 0.0092 | |
| 3. Vegetation | 0.0118 | 0.0196 | 0.1492 | |
| Total % Area | 0.5652 | 0.2692 | 0.1655 | |
| Standard Error | 0.0131 | 0.0126 | 0.0142 | |
| PA [%] | 96.28 | 87.42 | 90.12 | |
| UA [%] | 96.22 | 92.72 | 82.60 | |
| Kappa hat | 0.91 | 0.90 | 0.79 | |
| Estimated area (×106 m2) | 17.7564 | 8.4600 | 5.1995 | |
| Year 2020 | |||
|---|---|---|---|
| Class | Average | ||
| 1. Forest | 113 | 103 | 108 |
| 2. Bare land | 157 | 103 | 130 |
| 3. Vegetation | 39 | 103 | 71 |
| Total | 309 | 309 | 309 |
| Area Based Error Matrix for the Classified Data of the Year 2020 | ||||
|---|---|---|---|---|
| Classified | Reference | |||
| 1. Forest | 2. Bare land | 3. Vegetation | ||
| 1. Forest | 0.2022 | 0.0612 | 0.0071 | |
| 2. Bare land | 0.1622 | 0.1214 | 0.0090 | |
| 3. Vegetation | 0.0237 | 0.3110 | 0.1022 | |
| Total % Area | 0.3881 | 0.4936 | 0.1183 | |
| Standard Error | 0.0231 | 0.0131 | 0.0099 | |
| PA [%] | 90.12 | 89.14 | 87.12 | |
| UA [%] | 88.34 | 82.10 | 82.60 | |
| Kappa hat | 0.85 | 0.80 | 0.77 | |
| Estimated area (×106 m2) | 12.1929 | 15.5065 | 3.7165 | |
| Year 2018 | |||
|---|---|---|---|
| Class | Average | ||
| 1. Forest | 87 | 131 | 109 |
| 2. Bare land | 225 | 131 | 178 |
| 3. Vegetation | 81 | 131 | 106 |
| Total | 393 | 393 | 393 |
| Area Based Error Matrix for the Classified Data of the Year 2018 | ||||
|---|---|---|---|---|
| Classified | Reference | |||
| 1. Forest | 2. Bare land | 3. Vegetation | ||
| 1. Forest | 0.0097 | 0.5392 | 0.0258 | |
| 2. Bare land | 0.0096 | 0.0116 | 0.1833 | |
| 3. Vegetation | 0.1802 | 0.0202 | 0.0202 | |
| Total % Area | 0.1995 | 0.5711 | 0.2294 | |
| Standard Error | 0.0108 | 0.0129 | 0.0124 | |
| PA [%] | 90.31 | 94.42 | 79.91 | |
| UA [%] | 81.65 | 93.82 | 89.62 | |
| Kappa hat | 0.77 | 0.85 | 0.86 | |
| Estimated area (×106 m2) | 6.2689 | 17.9401 | 7.2069 | |
| Year 2016 | |||
|---|---|---|---|
| Class | Average | ||
| 1. Forest | 40 | 144 | 92 |
| 2. Bare land | 314 | 144 | 229 |
| 3. Vegetation | 78 | 144 | 111 |
| Total | 432 | 432 | 432 |
| Area Based Error Matrix for the Classified Data of the Year 2016 | ||||
|---|---|---|---|---|
| Classified | Reference | |||
| 1. Forest | 2. Bare land | 3. Vegetation | ||
| 1. Forest | 0.0348 | 0.6776 | 0.0127 | |
| 2. Bare land | 0.0000 | 0.0097 | 0.1695 | |
| 3. Vegetation | 0.0830 | 0.0126 | 0.0001 | |
| Total % Area | 0.1179 | 0.6999 | 0.1823 | |
| Standard Error | 0.0108 | 0.0130 | 0.0074 | |
| PA [%] | 70.44 | 96.81 | 93.05 | |
| UA [%] | 86.81 | 93.44 | 94.59 | |
| Kappa hat | 0.85 | 0.78 | 0.93 | |
| Estimated area (×106 m2) | 3.7026 | 21.9875 | 5.7257 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mateen, S.; Nuthammachot, N.; Techato, K.; Ullah, N. Billion Tree Tsunami Forests Classification Using Image Fusion Technique and Random Forest Classifier Applied to Sentinel-2 and Landsat-8 Images: A Case Study of Garhi Chandan Pakistan. ISPRS Int. J. Geo-Inf. 2023, 12, 9. https://doi.org/10.3390/ijgi12010009
Mateen S, Nuthammachot N, Techato K, Ullah N. Billion Tree Tsunami Forests Classification Using Image Fusion Technique and Random Forest Classifier Applied to Sentinel-2 and Landsat-8 Images: A Case Study of Garhi Chandan Pakistan. ISPRS International Journal of Geo-Information. 2023; 12(1):9. https://doi.org/10.3390/ijgi12010009
Chicago/Turabian StyleMateen, Shabnam, Narissara Nuthammachot, Kuaanan Techato, and Nasim Ullah. 2023. "Billion Tree Tsunami Forests Classification Using Image Fusion Technique and Random Forest Classifier Applied to Sentinel-2 and Landsat-8 Images: A Case Study of Garhi Chandan Pakistan" ISPRS International Journal of Geo-Information 12, no. 1: 9. https://doi.org/10.3390/ijgi12010009