

Spatial and Attribute Neural Network Weighted Regression for the Accurate Estimation of Spatial Non-Stationarity
Abstract
:1. Introduction
2. Study Area and Data
3. Methods
3.1. ”Spatial-Attribute” Unified Distance Metirc
3.1.1. Attribute Features
3.1.2. The Definition of “Spatial-Attribute” Unified Distance Metric
3.1.3. The Nonlinear Fusion of “Spatial-Attribute” Unified Distance Metric
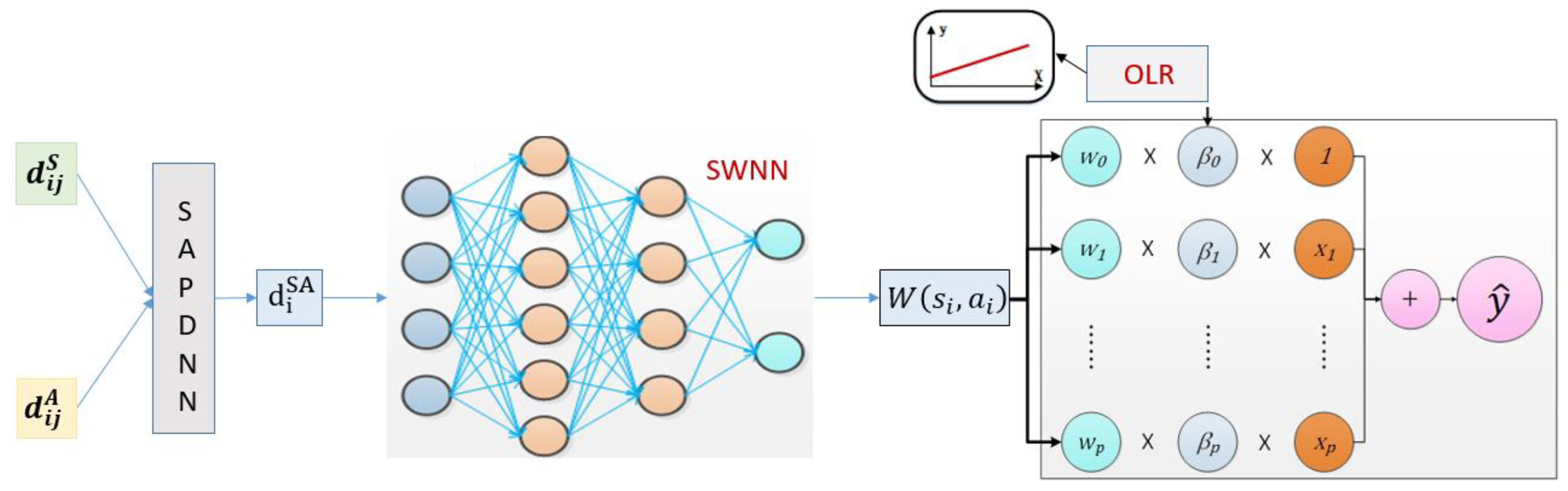
3.2. SANNWR Model
3.2.1. The Definition of SANNWR Model
3.2.2. Model Structure and Parameters
3.2.3. Model Optimization Training
4. Results
4.1. Design of Experiment
4.2. Analysis of Experimental Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Cressie, N. Statistics for spatial data. Terra Nova 1992, 4, 613–617. [Google Scholar] [CrossRef]
- Cressie, N.; Wikle, C.K. Statistics for Spatio-Temporal Data; John Wiley & Sons: New York, NY, USA, 2015; ISBN 978-047-169-274-4. [Google Scholar]
- Fotheringham, A.S.; Crespo, R.; Yao, J. Geographical and temporal weighted regression (GTWR). Geogr. Anal. 2015, 47, 431–452. [Google Scholar] [CrossRef] [Green Version]
- Goodchild, M.F. Prospects for a space–time GIS: Space–time integration in geography and GIScience. Ann. Assoc. Am. Geogr. 2013, 103, 1072–1077. [Google Scholar] [CrossRef]
- Brunsdon, C.; Fotheringham, A.S.; Charlton, M.E. Geographically weighted regression: A method for exploring spatial nonstationarity. Geogr. Anal. 1996, 28, 281–298. [Google Scholar] [CrossRef]
- Xu, B.; Lin, B. Factors affecting CO2 emissions in China’s agriculture sector: Evidence from geographically weighted regression model. Energy Policy 2017, 104, 404–414. [Google Scholar] [CrossRef]
- Cahill, M.; Mulligan, G. Using geographically weighted regression to explore local crime patterns. Soc. Sci. Comput. Rev. 2007, 25, 174–193. [Google Scholar] [CrossRef]
- Sheng, J.; Han, X.; Zhou, H. Spatially varying patterns of afforestation/reforestation and socio-economic factors in China: A geographically weighted regression approach. J. Clean. Prod. 2017, 153, 362–371. [Google Scholar] [CrossRef]
- Huang, B.; Wu, B.; Barry, M. Geographically and temporally weighted regression for modeling spatio-temporal variation in house prices. Int. J. Geogr. Inf. Sci. 2010, 24, 383–401. [Google Scholar] [CrossRef]
- Wu, B.; Li, R.R.; Huang, B. A geographically and temporally weighted autoregressive model with application to housing prices. Int. J. Geogr. Inf. Sci. 2014, 28, 1186–1204. [Google Scholar] [CrossRef]
- Fotheringham, A.S.; Crespo, R.; Yao, J. Exploring, modelling and predicting spatiotemporal variations in house prices. Ann. Reg. Sci. 2015, 54, 417–436. [Google Scholar] [CrossRef]
- Yao, J.; Fotheringham, A.S. Local spatiotemporal modeling of house prices: A mixed model approach. Prof. Geogr. 2016, 68, 189–201. [Google Scholar] [CrossRef]
- Brunsdon, C.; Fotheringham, S.; Charlton, M. Geographically weighted regression. J. R. Stat. Soc. Ser. D (Stat.) 1998, 47, 431–443. [Google Scholar] [CrossRef]
- Fotheringham, A.S.; Brunsdon, C.; Charlton, M. Geographically Weighted Regression: The Analysis of Spatially Varying Relationships; John Wiley & Sons: Oxford, UK; New York, NY, USA, 2002; ISBN 978-661-027-017-0. [Google Scholar]
- Gollini, I.; Lu, B.; Charlton, M. GWmodel: An R Package for Exploring Spatial Heterogeneity using Geographically Weighted Models. arXiv 2014. [Google Scholar] [CrossRef] [Green Version]
- Fotheringham, A.S.; Yang, W.; Kang, W. Multiscale geographically weighted regression (MGWR). Ann. Am. Assoc. Geogr. 2017, 107, 1247–1265. [Google Scholar] [CrossRef]
- Li, Z. Measuring bandwidth uncertainty in multiscale geographically weighted regression using akaike weights. Ann. Am. Assoc. Geogr. 2020, 110, 1500–1520. [Google Scholar] [CrossRef]
- Yu, H. Inference in multiscale geographically weighted regression. Geogr. Anal. 2020, 52, 87–106. [Google Scholar] [CrossRef]
- Yue, P.; Ramachandran, R.; Baumann, P. Recent activities in Earth data science [technical committees]. IEEE Geosci. Remote Sens. Mag. 2016, 4, 84–89. [Google Scholar] [CrossRef]
- Yue, P.; Shangguan, B.; Hu, L. Towards a training data model for artificial intelligence in earth observation. Int. J. Geogr. Inf. Sci. 2022, 36, 2113–2137. [Google Scholar] [CrossRef]
- Wu, S. The Theory and Method of Geographically and Temporally Neural Network Weighted Regression. Ph.D. Thesis, Zhejiang University, Hangzhou, China, 2018. [Google Scholar]
- Wu, S. Modeling spatially anisotropic nonstationary processes in coastal environments based on a directional geographically neural network weighted regression. Sci. Total Environ. 2020, 709, 136097. [Google Scholar] [CrossRef]
- Yue, P.; Di, L.; Wei, Y. Intelligent services for discovery of complex geospatial features from remote sensing imagery. ISPRS J. Photogramm. Remote Sens. 2013, 83, 151–164. [Google Scholar] [CrossRef]
- Shi, H.; Zhang, L.; Liu, J. A new spatial-attribute weighting function for geographically weighted regression. Can. J. For. Res. 2006, 36, 996–1005. [Google Scholar] [CrossRef] [Green Version]
- Du, Z.; Wang, Z.; Wu, S. Geographically neural network weighted regression for the accurate estimation of spatial non-stationarity. Int. J. Geogr. Inf. Sci. 2020, 34, 1353–1377. [Google Scholar] [CrossRef]
- Srivastava, N. Dropout: A simple way to prevent neural networks from overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar] [CrossRef]
- Nakaya, T. GWR4 User Manual. WWW Document. 2014. Available online: http://www. st-andrews.ac.uk/geoinformatics/wp-content/uploads/GWR4manual_201311.pdf (accessed on 4 November 2013).
- Kirkwood, C.; Cave, M.; Beamish, D.; Grebby, S.; Ferreira, A. A machine learning approach to geochemical mapping. J. Geochem. Explor. 2016, 167, 49–61. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, W.; Muhammad, K.; Glass, H.J.; Chatterjee, S.; Khan, A.; Hussain, A. Novel MLR-RF-Based Geospatial Techniques: A Comparison with OK. ISPRS Int. J. Geo-Inf. 2022, 11, 371. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Set | Variable | Unit | Maximum | Minimum | Mean | Standard Deviation |
|---|---|---|---|---|---|---|
| total data set (1445) | PM2.5 | 129.109 | 8.037 | 40.974 | 13.704 | |
| WD | ° | 243.181 | 81.689 | 150.8016 | 44.472 | |
| AOD | / | 1200.82 | 64.858 | 529.988 | 186.749 | |
| TEMP | 299.735 | 271.645 | 287.738 | 5.305 | ||
| r | 86.685 | 24.961 | 62.211 | 12.495 | ||
| TP | 2.1 × 10−4 | 1.56 × 10−6 | 9.46 × 10−5 | 4.74 × 10−5 | ||
| WS | 16.228 | 3.54 × 10−7 | 1.541 | 2.139 | ||
| DEM | 4525.00 | −6.000 | 397.375 | 667.306 | ||
| cross-validation set (1245) | PM2.5 | 110.399 | 8.507 | 40.752 | 13.306 | |
| WD | ° | 243.155 | 81.689 | 150.485 | 44.178 | |
| AOD | / | 1200.82 | 64.858 | 527.093 | 186.289 | |
| TEMP | 299.735 | 271.645 | 287.647 | 5.309 | ||
| r | 88.685 | 24.961 | 62.081 | 12.472 | ||
| TP | 2.1 × 10−4 | 1.56 × 10−6 | 9.5 × 10−5 | 4.78 × 10−5 | ||
| WS | 16.228 | 3.54 × 10−7 | 1.541 | 2.136 | ||
| DEM | 4525.00 | −6.000 | 405.364 | 669.400 | ||
| test set (220) | PM2.5 | 129.109 | 8.037 | 42.192 | 15.691 | |
| WD | ° | 243.181 | 87.459 | 152.578 | 45.961 | |
| AOD | / | 1033.54 | 30.768 | 545.992 | 188.187 | |
| TEMP | 297.562 | 272.602 | 288.262 | 5.238 | ||
| r | 84.644 | 25.641 | 62.946 | 12.568 | ||
| TP | 1.96 × 10−4 | 3.96 × 10−6 | 9.23 × 10−5 | 4.46 × 10−5 | ||
| WS | 12.855 | 3.25 × 10−4 | 1.542 | 2.152 | ||
| DEM | 4520.00 | 2.000 | 352.275 | 651.946 |
| SANNWR Model Structure Setup | ||||
|---|---|---|---|---|
| Hierarchy | Settings | Input Data Dimension | Output Data Dimension | |
| SAPDNN | ||||
| Input layer | - | 2 | 2 | |
| Hidden layer | 3 | 2 | 3 | |
| Output layer | 1 | 3 | 1 | |
| SWNN | ||||
| Input layer | - | 1120 | 1120 | |
| Hidden layer-a | 50 | 1120 | 50 | |
| Hidden layer-b | 20 | 50 | 20 | |
| Output layer | 7 | 20 | 7 | |
| SANNWR Model hyper-parameter setting | ||||
| Initial Learning Rate | Max Learning Rate | Maximum value of epoch | Batch size | Dropout |
| 0.02 | 0.67 | 200,000 | 16 | 0.7 |
| SANNWR Model Training and Optimization Process |
|---|
| 1: Neural network model training starts; 2: Divide dataset. The data set is divided into a cross-validation set and a test set. Then, the cross-validation set is divided into N equal parts. When we train the model, one part of the cross-validation set is used as the verification set and the rest are used as the training set. 3: Initialize the neural network hyper-parameters according to the preset related parameters, including initial and maximum learning rate, iteration times, etc. 4: Divide the training set into multiple mini batches. 5: Use mini-batch as input in sequence 6: Check whether the current epoch is complete. If not, switch to the next Mini Batch for training. 7: Calculate the overfitting index for the completed epoch. 8: View training indicators of the current epoch. If it is better than the previous optimal model, record the current neural network parameters and zero the tolerance value. Otherwise, judging whether the tolerance value has reached the maximum value; If yes, end training and restore parameters of the optimal model; Otherwise, increasing the tolerance value to continue training; 9: Check whether the number of epoch times has reached the upper limit. If yes, end training and restore parameters of the optimal model; If not, scramble the data set involved in the training, and continue the training. 10: Calculate and verify the generalization capability of the model. 11: End the neural network training process. |
| Combination Name | Kernel Function Type | kernel Function Structure |
|---|---|---|
| GWR-AFG | Fixed | Gaussian |
| GWR-AAG | adaptive | Gaussian |
| GWR-AAB | adaptive | Bi-square |
| Model Name | GWR | GNNWR and SANNWR |
|---|---|---|
| Software environment | MATLAB 2016a | TensorFlow 1.7/CUDA9.0/ Python 3.6 |
| Number of machines | 1 | |
| Hardware environment | CPU: Inter(R) XEON E3-1231V3 3.4 GHz Memory: 32 GB Graphics card: NVIDIA Quadro RTX4000 OS: Windows 10 ×64 | |
| Model | Ten Cross-Validation Results (Fitness) | Evaluation Result (Forecast) | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Train Set | Validation Set | Test Set | |||||||||||||
| R2 | RMSE | MAE | MAPE | AICc | F1 | p-Value | R2 | RMSE | MAE | MAPE | R2 | RMSE | MAE | MAPE | |
| GWR-AAB-A | 0.693 | 7.375 | 5.625 | 15.568% | 7769.641 | 0.666 | 0.01 | 0.665 | 7.755 | 6.049 | 15.719% | 0.724 | 8.456 | 5.704 | 14.373% |
| GWR-AFG-A | 0.692 | 7.378 | 5.607 | 15.475% | 7779.451 | 0.671 | 0.01 | 0.687 | 7.490 | 5.869 | 15.381% | 0.721 | 8.494 | 5.809 | 14.566% |
| GWR-AAG-A | 0.699 | 7.299 | 5.583 | 15.511% | 7764.819 | 0.654 | 0.01 | 0.648 | 7.934 | 6.212 | 16.364% | 0.711 | 8.438 | 6.526 | 17.640% |
| GWR-AAB-S | 0.711 | 7.175 | 5.437 | 15.210% | 7656.975 | 0.615 | 0.01 | 0.737 | 6.871 | 5.342 | 14.256% | 0.739 | 8.190 | 5.741 | 15.098% |
| GWR-AFG-S | 0.708 | 7.221 | 5.603 | 15.326% | 7678.801 | 0.626 | 0.01 | 0.719 | 7.152 | 5.598 | 14.624% | 0.781 | 7.624 | 5.900 | 15.555% |
| GWR-AAG-S | 0.710 | 7.191 | 5.364 | 15.239% | 7666.507 | 0.616 | 0.01 | 0.642 | 8.005 | 6.268 | 16.533% | 0.742 | 7.979 | 5.982 | 15.929% |
| GNNWR-A | 0.714 | 7.064 | 5.362 | 14.698% | 7588.525 | 0.137 | 0.01 | 0.706 | 7.697 | 5.541 | 15.994% | 0.739 | 8.237 | 5.487 | 13.703% |
| GNNWR-S | 0.841 | 5.270 | 3.866 | 10.773% | 6912.113 | 0.278 | 0.01 | 0.768 | 6.387 | 4.668 | 12.565% | 0.844 | 6.377 | 4.307 | 11.213% |
| SANNWR | 0.860 | 4.981 | 3.651 | 10.142% | 6792.544 | 0.248 | 0.01 | 0.824 | 5.747 | 4.261 | 10.845% | 0.857 | 6.251 | 4.205 | 10.949% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ni, S.; Wang, Z.; Wang, Y.; Wang, M.; Li, S.; Wang, N. Spatial and Attribute Neural Network Weighted Regression for the Accurate Estimation of Spatial Non-Stationarity. ISPRS Int. J. Geo-Inf. 2022, 11, 620. https://doi.org/10.3390/ijgi11120620
Ni S, Wang Z, Wang Y, Wang M, Li S, Wang N. Spatial and Attribute Neural Network Weighted Regression for the Accurate Estimation of Spatial Non-Stationarity. ISPRS International Journal of Geo-Information. 2022; 11(12):620. https://doi.org/10.3390/ijgi11120620
Chicago/Turabian StyleNi, Sihan, Zhongyi Wang, Yuanyuan Wang, Minghao Wang, Shuqi Li, and Nan Wang. 2022. "Spatial and Attribute Neural Network Weighted Regression for the Accurate Estimation of Spatial Non-Stationarity" ISPRS International Journal of Geo-Information 11, no. 12: 620. https://doi.org/10.3390/ijgi11120620