Real-Time Cable Force Calculation beyond the Wrench-Feasible Workspace


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Modeling and Cable-Robot Basics
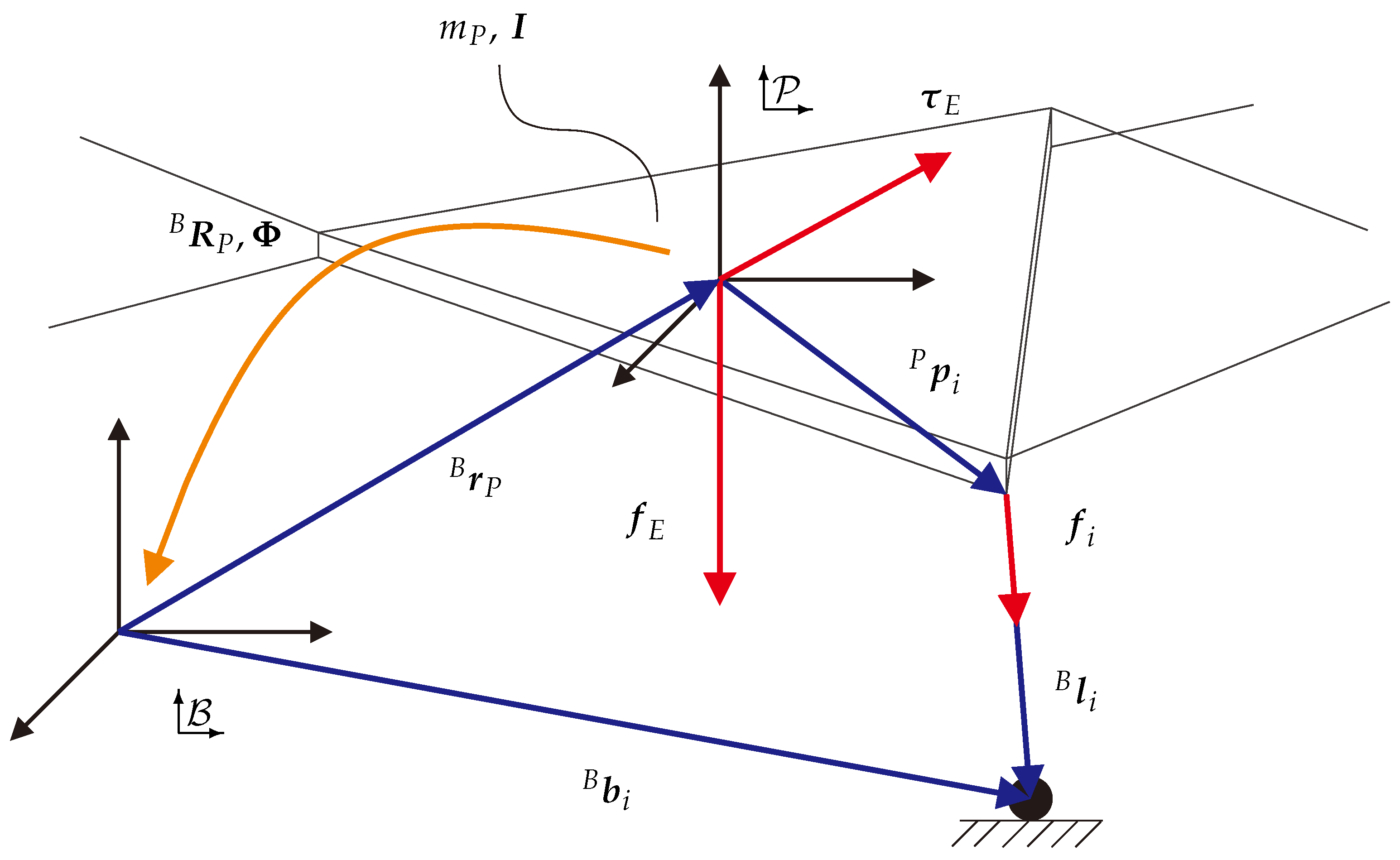
 , where the mobile platform carries the platform-fixed coordinate-system
, where the mobile platform carries the platform-fixed coordinate-system  . The robot possesses n degrees-of-freedom and m cables. Therefore, the redundancy of the platform is . The posture of the platform—which here is the end-effector of the robot—referenced in coordinates of the inertial frame is defined as . Herein, is the position vector and the orientation of the end-effector, both defined as row vectors. The orientation with respect to the inertial coordinate-system is described in the means of roll-pitch-yaw angles by the rotation matrix . Assuming a point-shaped guidance of the cable at the point where the cable is leaving into the workspace, the modeling of pulleys is neglected in the following. Using inverse kinematics, the cable vectors , as shown in Figure 1, can be obtained by:, whereas for simplicity, the top-left index is left out. and depends on the orientation of the platform. is an identity matrix. Matrix and its time derivative can be obtained from the kinematic Kardan equations [14]. contains the Coriolis and centrifugal forces and torques, while is the vector of external forces and torques acting on the platform. The presented cable-robot model and the underlying equations are based on [15].
. The robot possesses n degrees-of-freedom and m cables. Therefore, the redundancy of the platform is . The posture of the platform—which here is the end-effector of the robot—referenced in coordinates of the inertial frame is defined as . Herein, is the position vector and the orientation of the end-effector, both defined as row vectors. The orientation with respect to the inertial coordinate-system is described in the means of roll-pitch-yaw angles by the rotation matrix . Assuming a point-shaped guidance of the cable at the point where the cable is leaving into the workspace, the modeling of pulleys is neglected in the following. Using inverse kinematics, the cable vectors , as shown in Figure 1, can be obtained by:, whereas for simplicity, the top-left index is left out. and depends on the orientation of the platform. is an identity matrix. Matrix and its time derivative can be obtained from the kinematic Kardan equations [14]. contains the Coriolis and centrifugal forces and torques, while is the vector of external forces and torques acting on the platform. The presented cable-robot model and the underlying equations are based on [15].2.1. Wire Force Distribution
3. Force Calculation Outside the Wrench-Feasible Workspace
3.1. Optimization
3.2. Nearest Corner Method
4. Simulation and Results
4.1. Evaluation for Redundancy
4.2. The Effect of Different Exponential Weights
4.3. Evaluation for Redundancy
4.4. Computational Efficiency
4.5. Continuity
5. Conclusions and Outlook
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| CDPR | Cable-driven parallel robot |
| Wrench-feasible workspace |
References
- Bruckmann, T.; Mattern, H.; Spengler, A.; Reichert, C.; Malkwitz, A.; König, M. Automated construction of Masonry buildings using cable-driven parallel robots. In Proceedings of the 33rd International Symposium on Automation and Robotics in Construction and Mining (ISARC), Auburn, AL, USA, 18–21 July 2016; pp. 332–340. [Google Scholar]
- Izard, J.B.; Dubor, A.; Herve, P.E.; Cabay, E.; Culla, D.; Rodriguez, M.; Barrado, M. Large-scale 3D printing with cable-driven parallel robots. Constr. Robot. 2017, 1, 69–76. [Google Scholar] [CrossRef]
- Bruckmann, T.; Lalo, W.; Nguyen, K.; Salah, B. Development of a storage retrieval machine for high racks using a wire robot. In Proceedings of the ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Chicago, IL, USA, 12–15 August 2012; pp. 771–780. [Google Scholar]
- Gouttefarde, M.; Merlet, J.-P.; Daney, D. Wrench-Feasible workspace of parallel cable-driven mechanisms. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Roma, Italy, 10–14 April 2007; pp. 1492–1497. [Google Scholar]
- Pott, A. Cable-driven Parallel Robots: Theory and Application. In Springer Tracts in Advanced Robotics; Springer: Berlin, Germany, 2018; ISBN 978-3-319-76137-4. [Google Scholar]
- Boumann, R.; Bruckmann, T. Computationally Efficient Cable Force Calculation Outside the Wrench-Feasible Workspace. In Robotics and Mechatronics, ISRM 2019, Proceedings of the IFToMM International Symposium on Robotics and Mechatronics, Taiwan, China, 28–30 October 2019; Kuo, C.H., Lin, P.C., Essomba, T., Chen, G.C., Eds.; Springer: Cham, Switzerland, 2020; Volume 78. [Google Scholar]
- Boumann, R.; Bruckmann, T. Simulation of Cable Breaks and Development of Emergency Strategies for Cable-Driven Parallel Robots. In Proceedings of the Fourth International Conference on Cable-Driven Parallel Robots, Krakow, Poland, 30 June–4 July 2019. [Google Scholar]
- Boschetti, G.; Passarini, C.; Trevisani, A. A Strategy for Moving Cable Driven Robots Safely in Case of Cable Failure. In Advances in Italian Mechanism Science; Boschetti, G., Gasparetto, A., Eds.; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Notash, L. Failure recovery for wrench capability of wire-actuated parallel manipulators. Robotica 2012, 30, 941–950. [Google Scholar] [CrossRef] [Green Version]
- Notash, L. Wrench Recovery for Wire-Actuated Parallel Manipulators. In Romansy 19-Robot Design, Dynamics and Control; Padois, V., Bidaud, P., Khatib, O., Eds.; Springer: Vienna, Austria, 2013. [Google Scholar]
- Verhoeven, R.; Hiller, M. Estimating the Controllable Workspace of Tendon-Based Stewart Platforms. In Advances in Robot Kinematics; Lennarčič, J., Stanisic, M.M., Eds.; Springer: Dordrecht, The Netherlands, 2000. [Google Scholar]
- Côté, A.F.; Cardou, P.; Gosselin, C. A tension distribution algorithm for cable-driven parallel robots operating beyond their wrench-feasible workspace. In Proceedings of the 16th International Conference on Control, Automation and Systems (ICCAS), Gyeongju, Korea, 16–19 October 2016; pp. 68–73. [Google Scholar]
- Hahn, H. Rigid Body Dynamics of Mechanisms: 1 Theoretical Basis; Springer: Berlin/Heidelberg, Germany, 2002. [Google Scholar]
- Hiller, M. Mechanische Systeme: Eine Einführung in die Analytische Mechanik und Systemdynamik; Springer: Heidelberg, Germany, 1983. [Google Scholar]
- Bruckmann, T.; Lalo, W.; Sturm, C. Application Examples of Wire Robots. In Multibody System Dynamics, Robotics and Control; Springer: Vienna, Austria, 2013. [Google Scholar]
- Verhoeven, R. Analysis of the Workspace of Tendon-Based Stewart Platforms. Ph.D. Thesis, University of Duisburg-Essen, Duisburg, Germany, 2004. [Google Scholar]
- Bruckmann, T.; Pott, A.; Hiller, M. Calculating force distributions for redundantly actuated tendon-based Stewart platforms. In Advances in Robot Kinematics; Lennarčič, J., Roth, B., Eds.; Springer: Dordrecht, The Netherlands, 2006. [Google Scholar]
- Mikelsons, L.; Bruckmann, T.; Hiller, M.; Schramm, D. A real-time capable force calculation algorithm for redundant tendon-based parallel manipulators. In Proceedings of the IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 3869–3874. [Google Scholar]
- Spong, M.W.; Hutchinson, S.; Vidyasagar, M. Robot Modeling and Control; Wiley: Hoboken, NJ, USA, 2005; ISBN 9780471649908. [Google Scholar]
- Müller, K.; Reichert, C.; Bruckmann, T. Analysis of a Real-Time Capable Cable Force Computation Method. In Cable-Driven Parallel Robots; Pott, A., Bruckmann, T., Eds.; Springer: Cham, Switzerland, 2014; Volume 32. [Google Scholar]
- Pott, A. An improved force distribution algorithm for over-constrained cable-driven parallel robots. In Computational Kinematics; Springer: Dordrecht, The Netherlands, 2013; pp. 139–146. [Google Scholar]







© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Boumann, R.; Bruckmann, T. Real-Time Cable Force Calculation beyond the Wrench-Feasible Workspace. Robotics 2020, 9, 41. https://doi.org/10.3390/robotics9020041
Boumann R, Bruckmann T. Real-Time Cable Force Calculation beyond the Wrench-Feasible Workspace. Robotics. 2020; 9(2):41. https://doi.org/10.3390/robotics9020041
Chicago/Turabian StyleBoumann, Roland, and Tobias Bruckmann. 2020. "Real-Time Cable Force Calculation beyond the Wrench-Feasible Workspace" Robotics 9, no. 2: 41. https://doi.org/10.3390/robotics9020041