
AgroCableBot: Reconfigurable Cable-Driven Parallel Robot for Greenhouse or Urban Farming Automation

 ,
,  ,
,  ,
,  and
and
Abstract
:1. Introduction
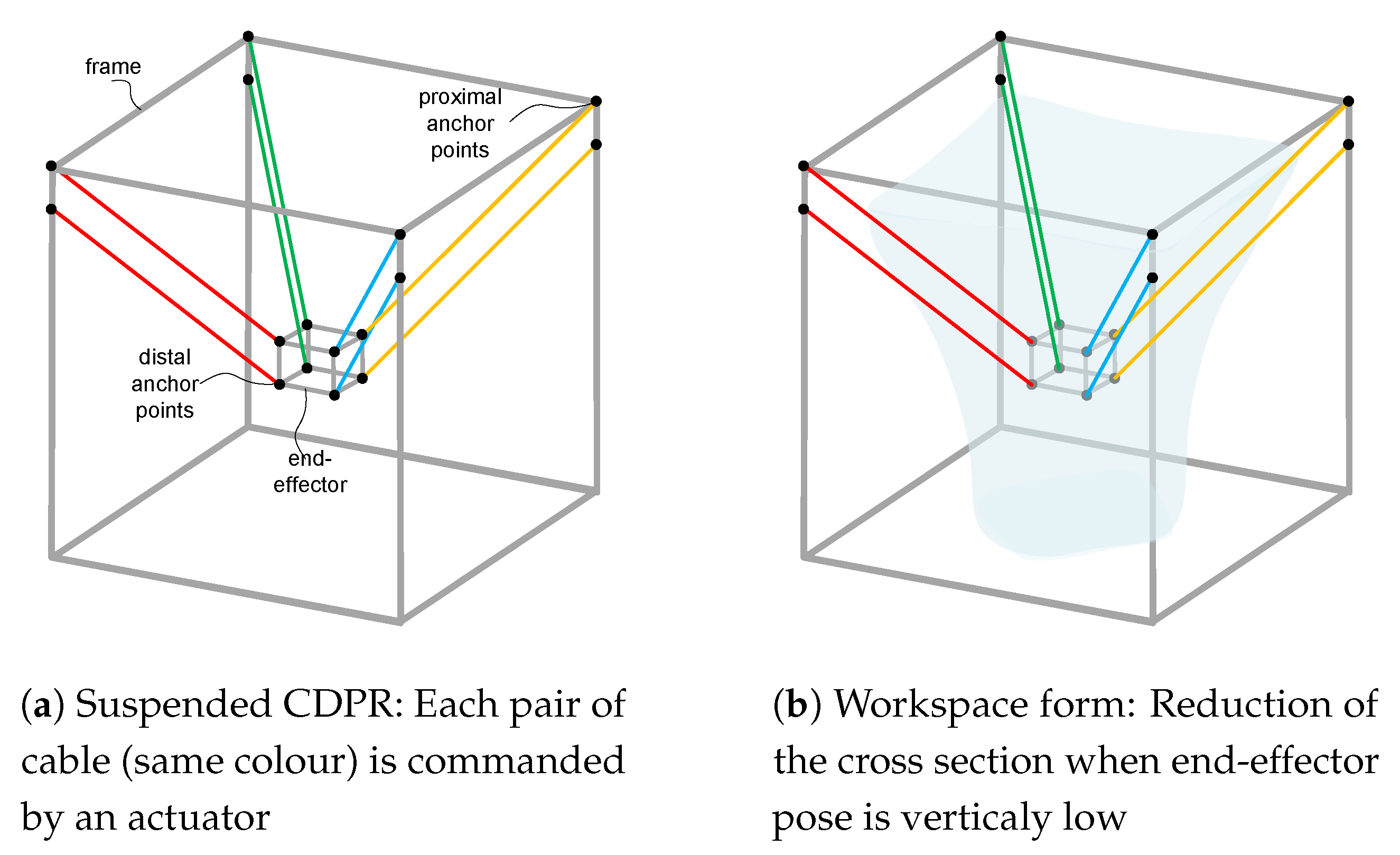
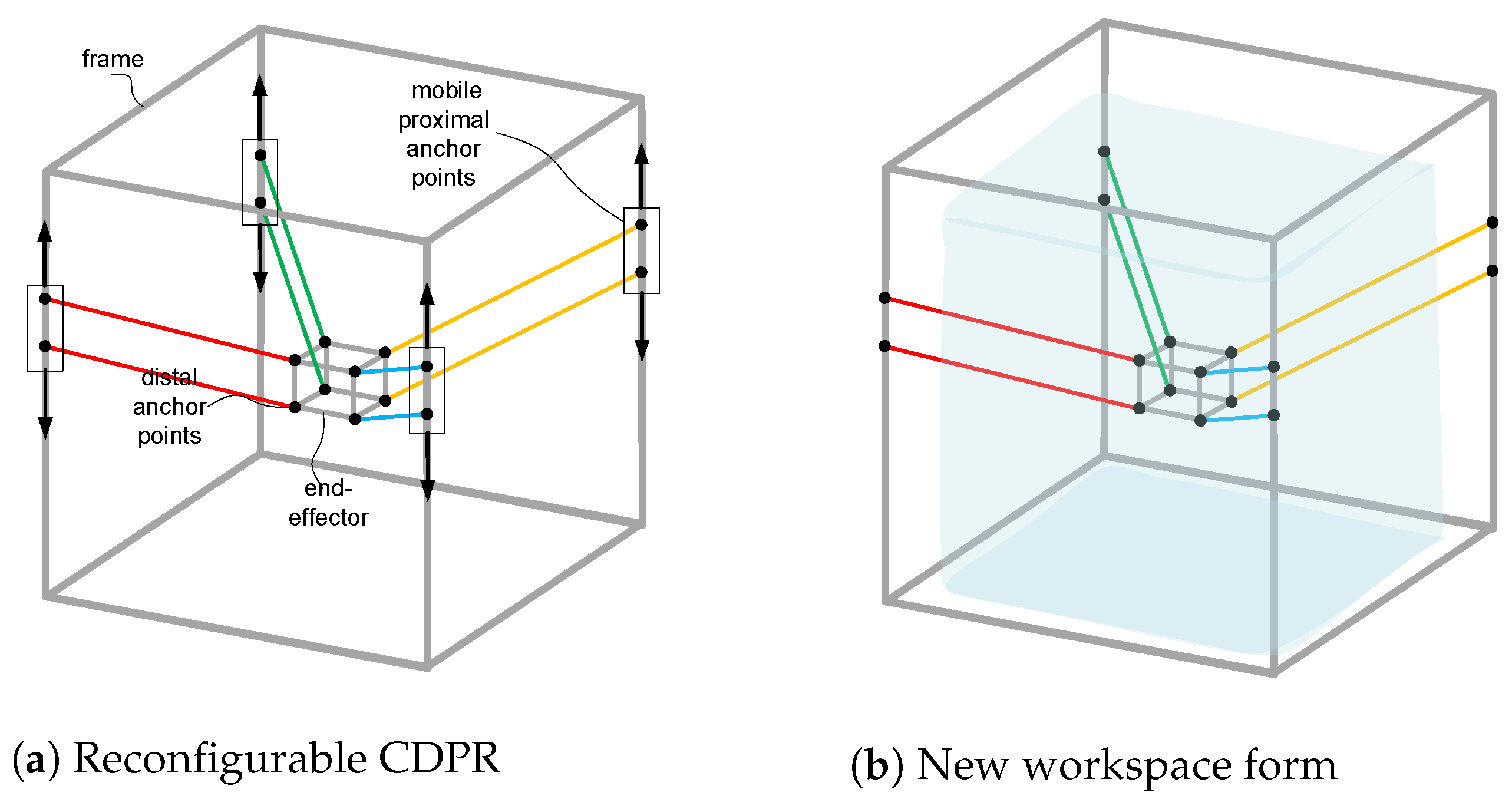
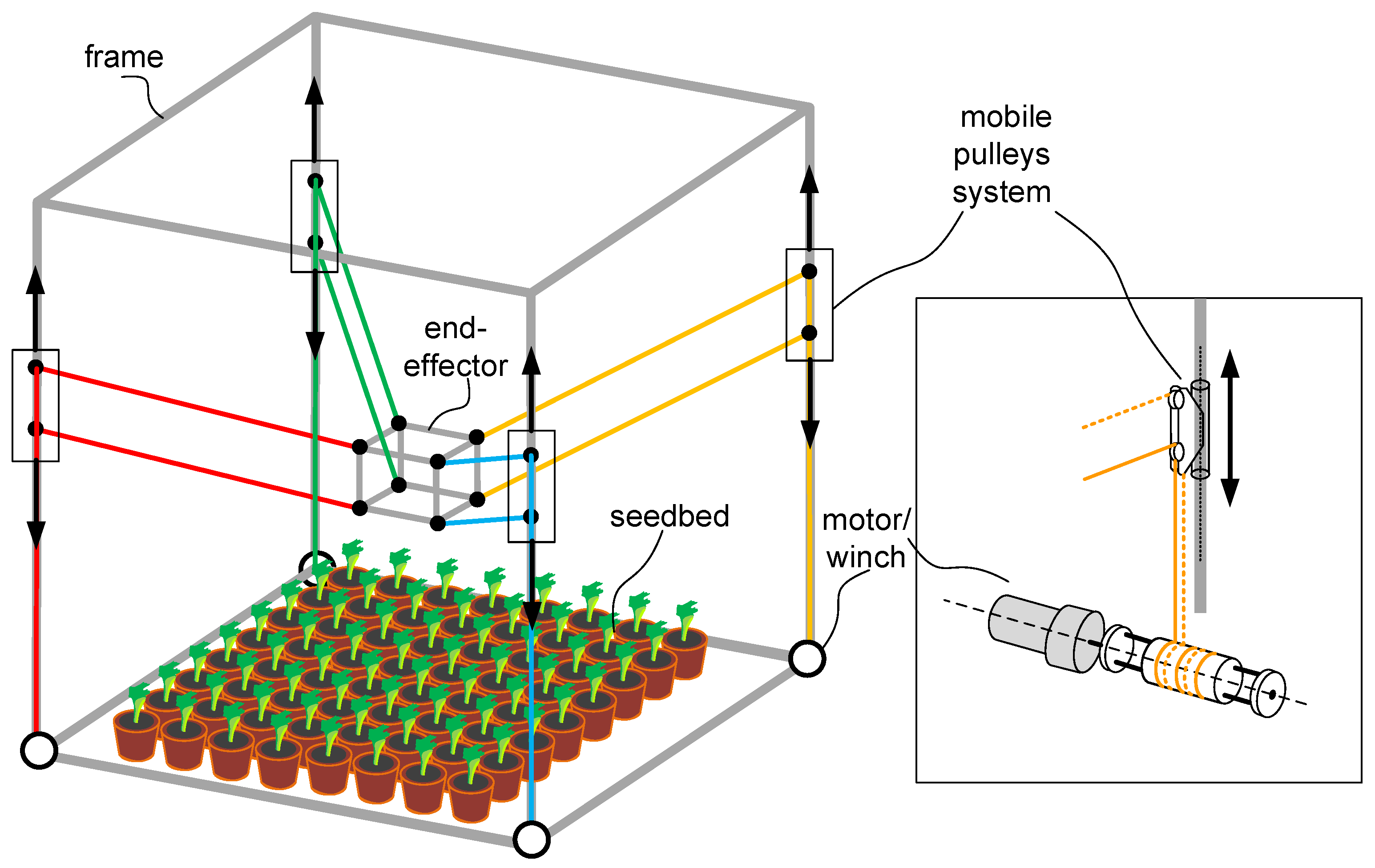
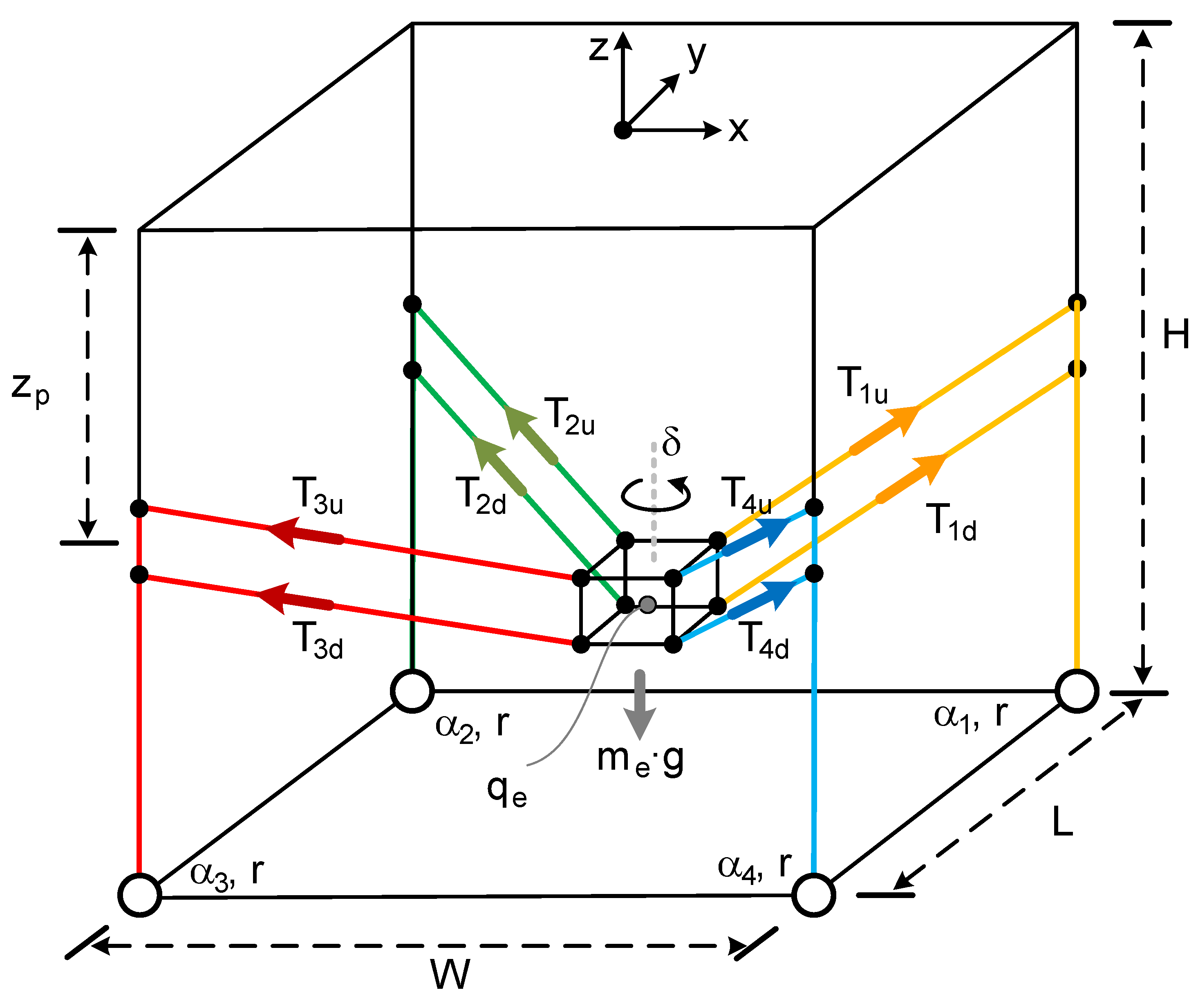
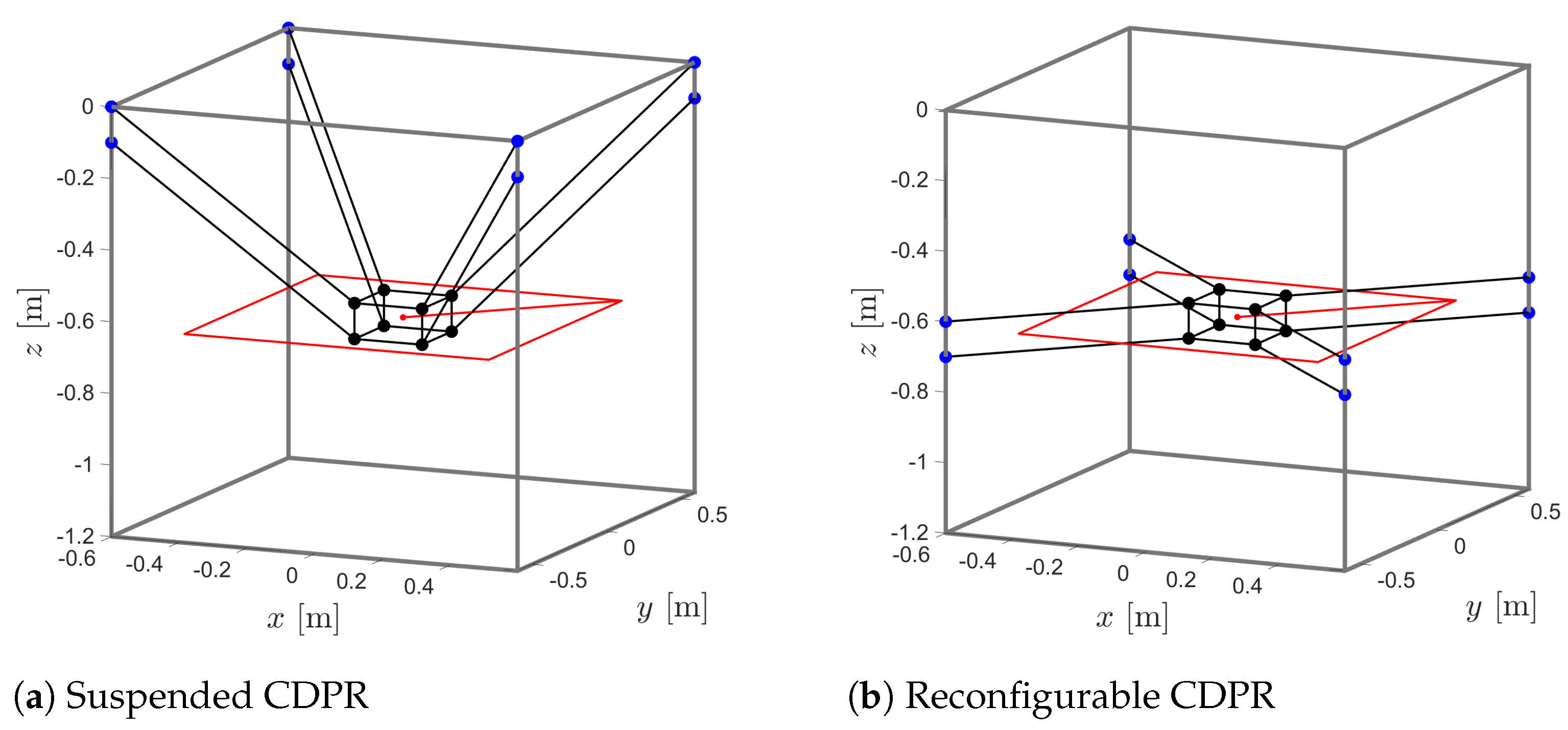
2. System Description
3. Mathematical Model
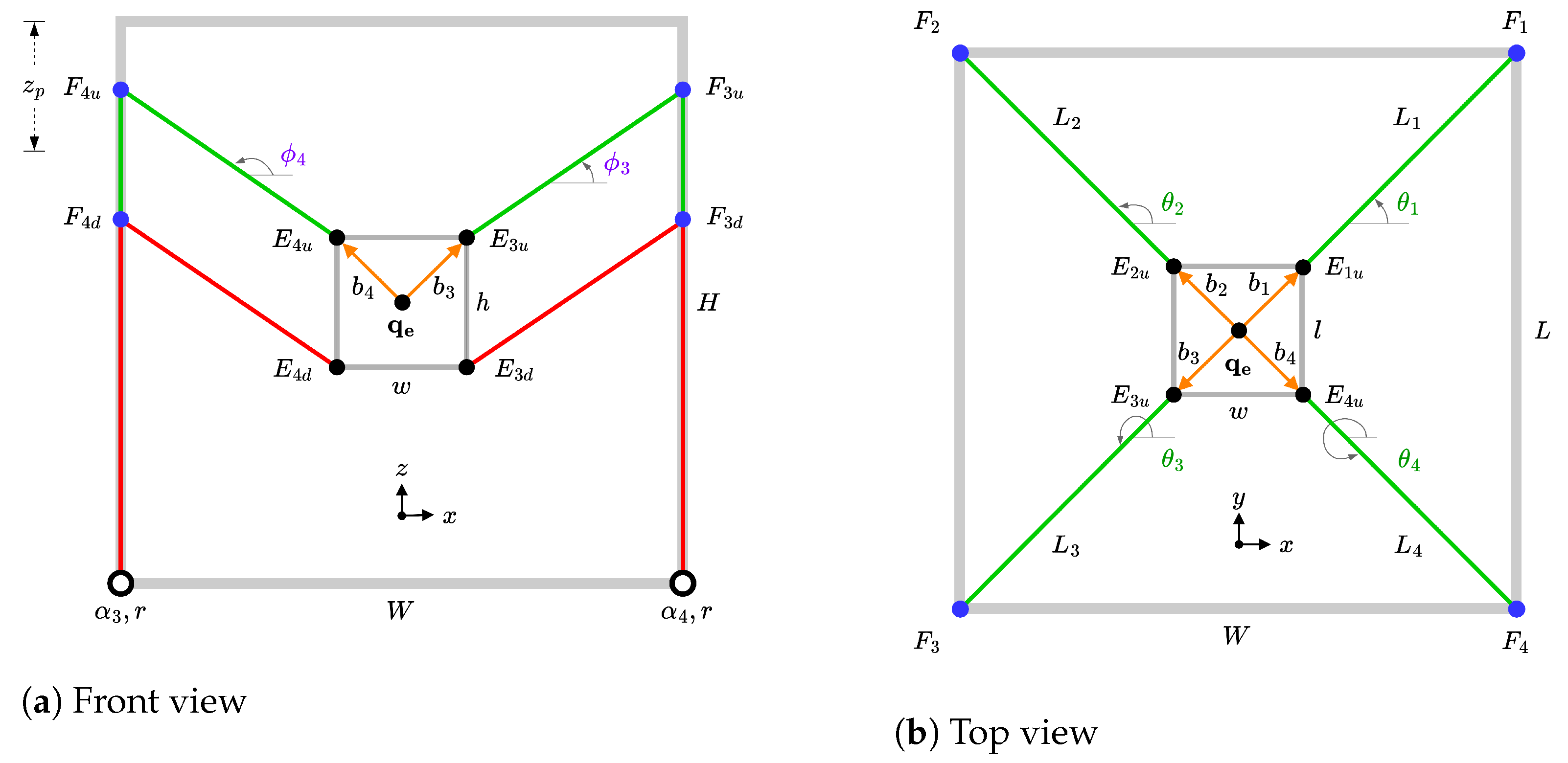
3.1. Kinematics and Statics
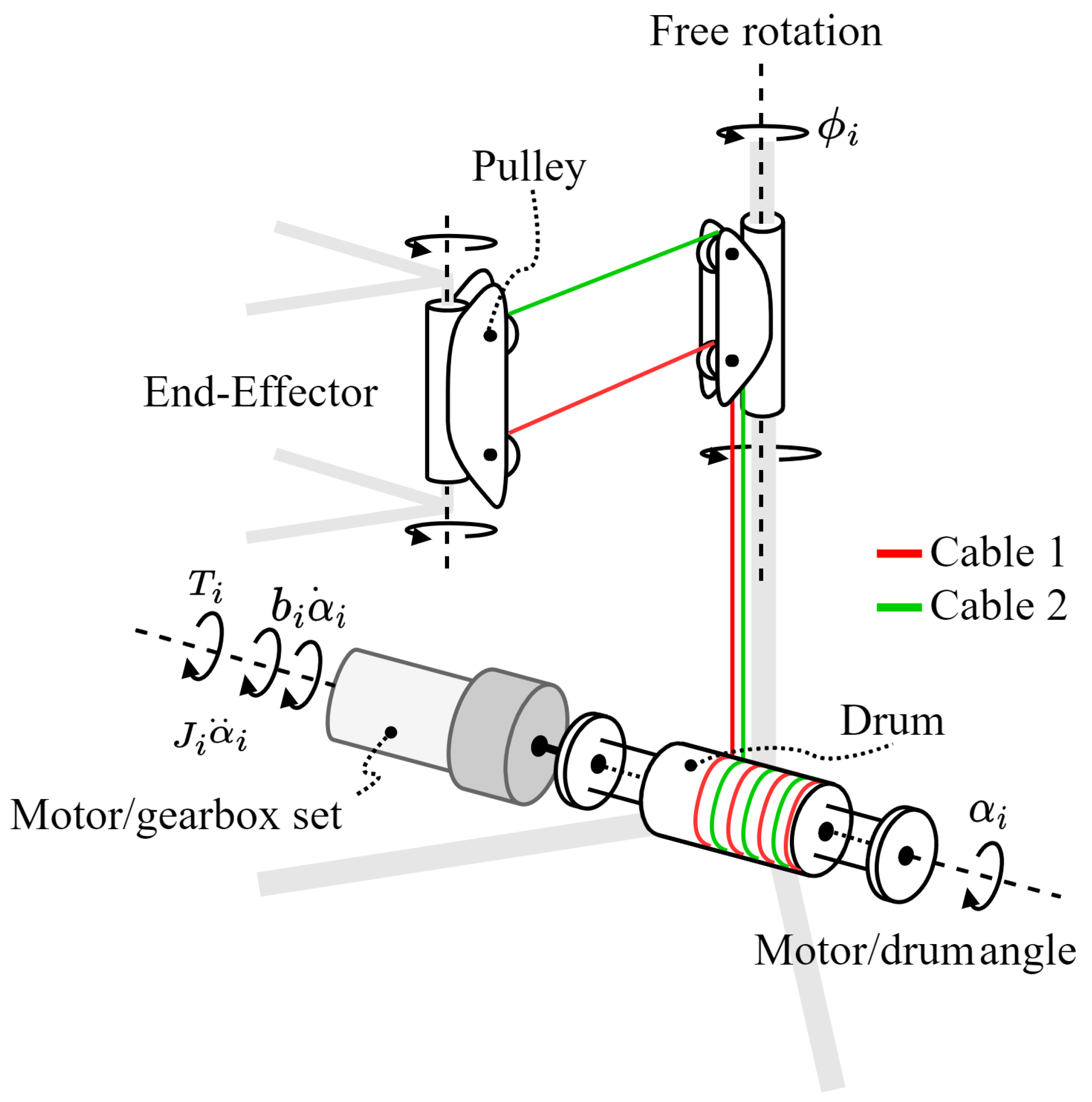
3.2. Dynamics Model
4. Simulation Results
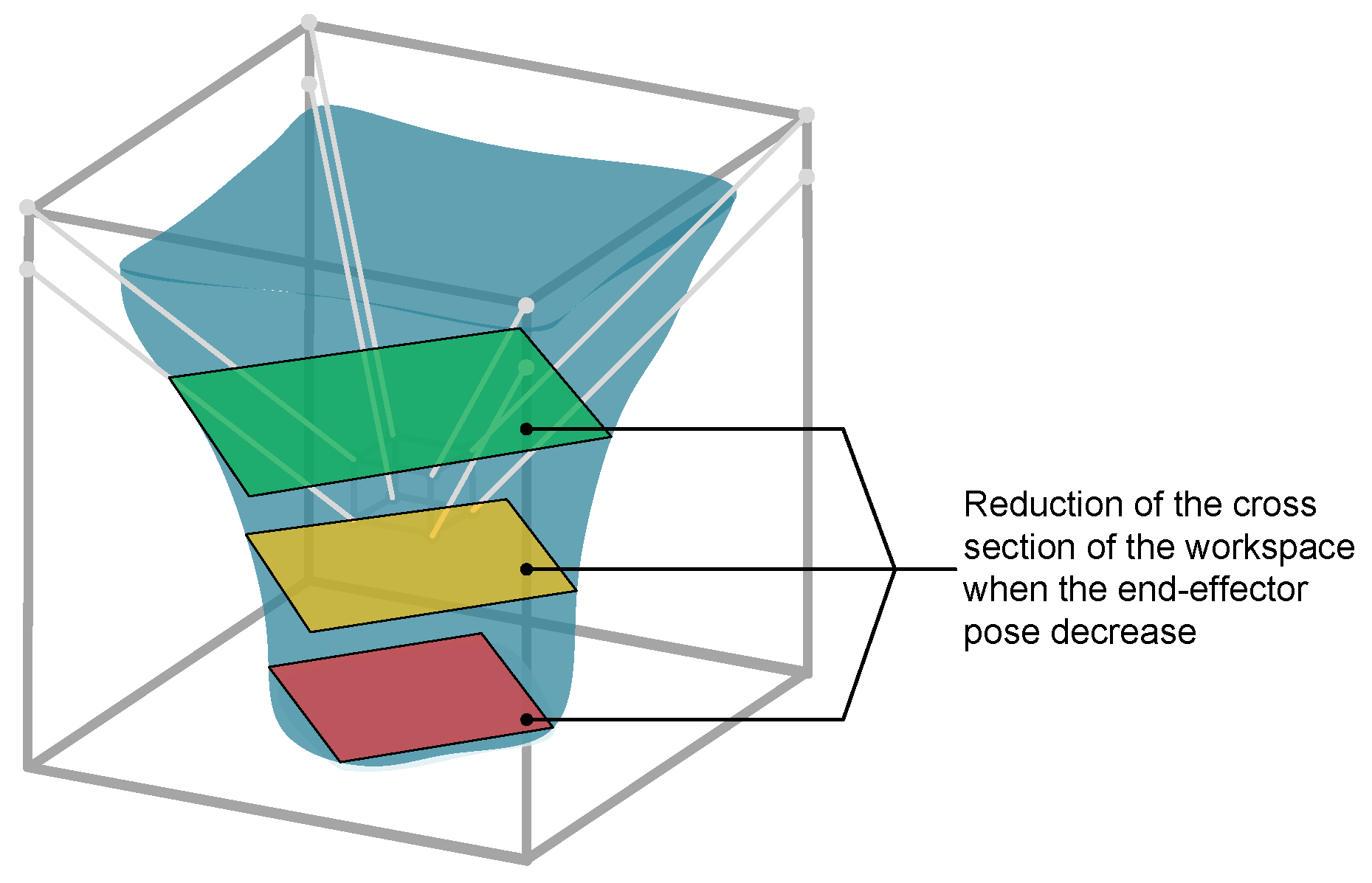
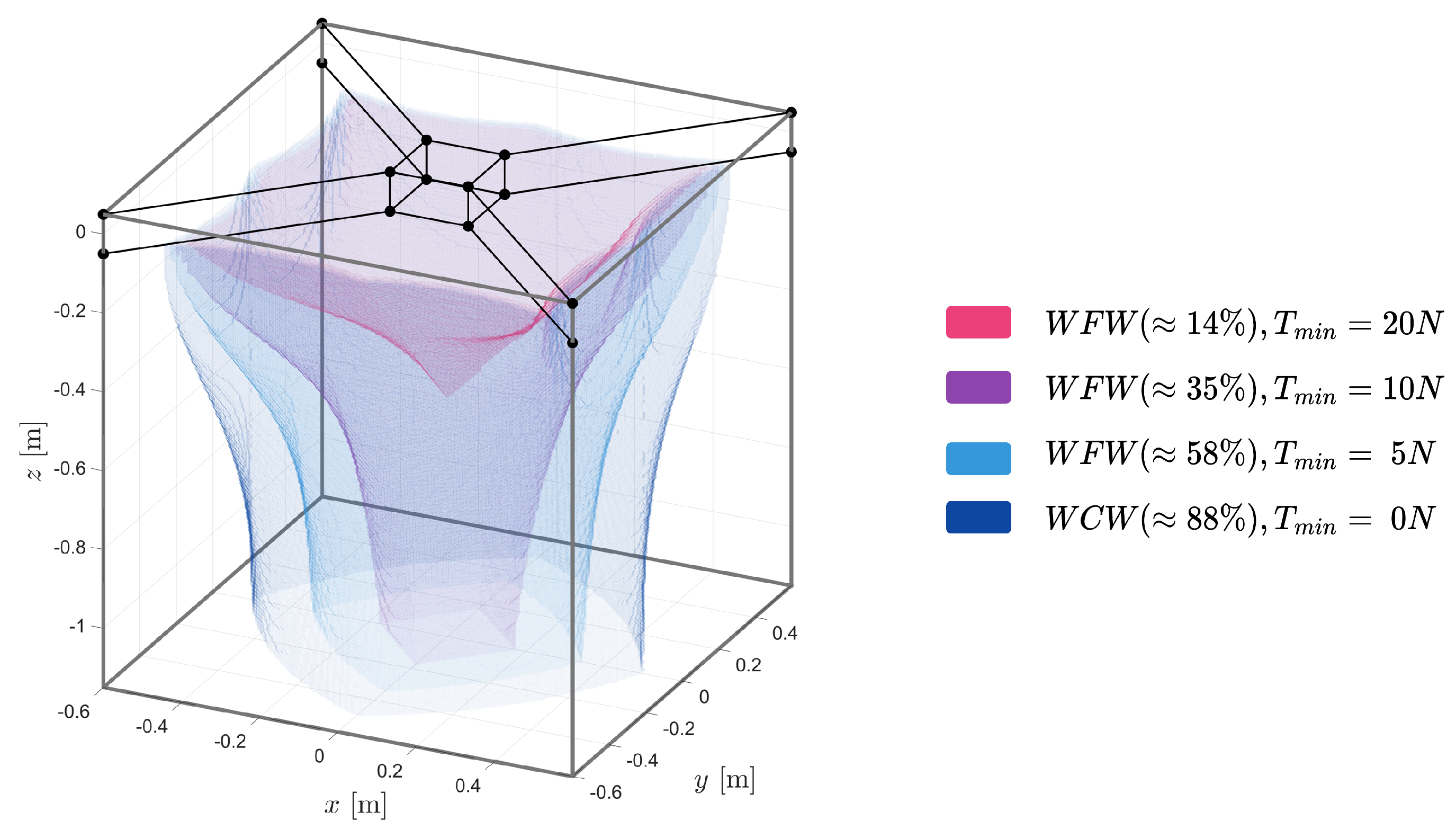
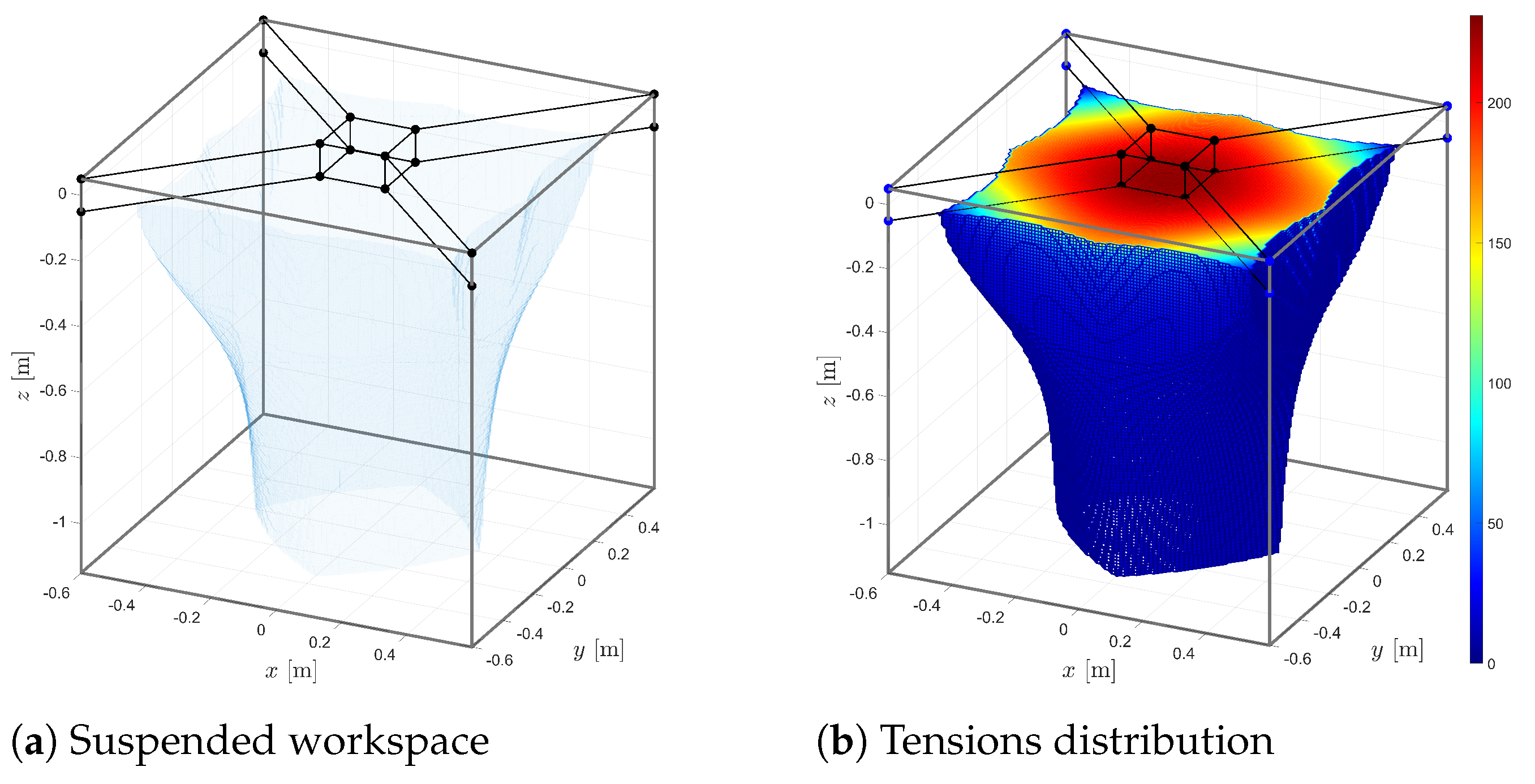
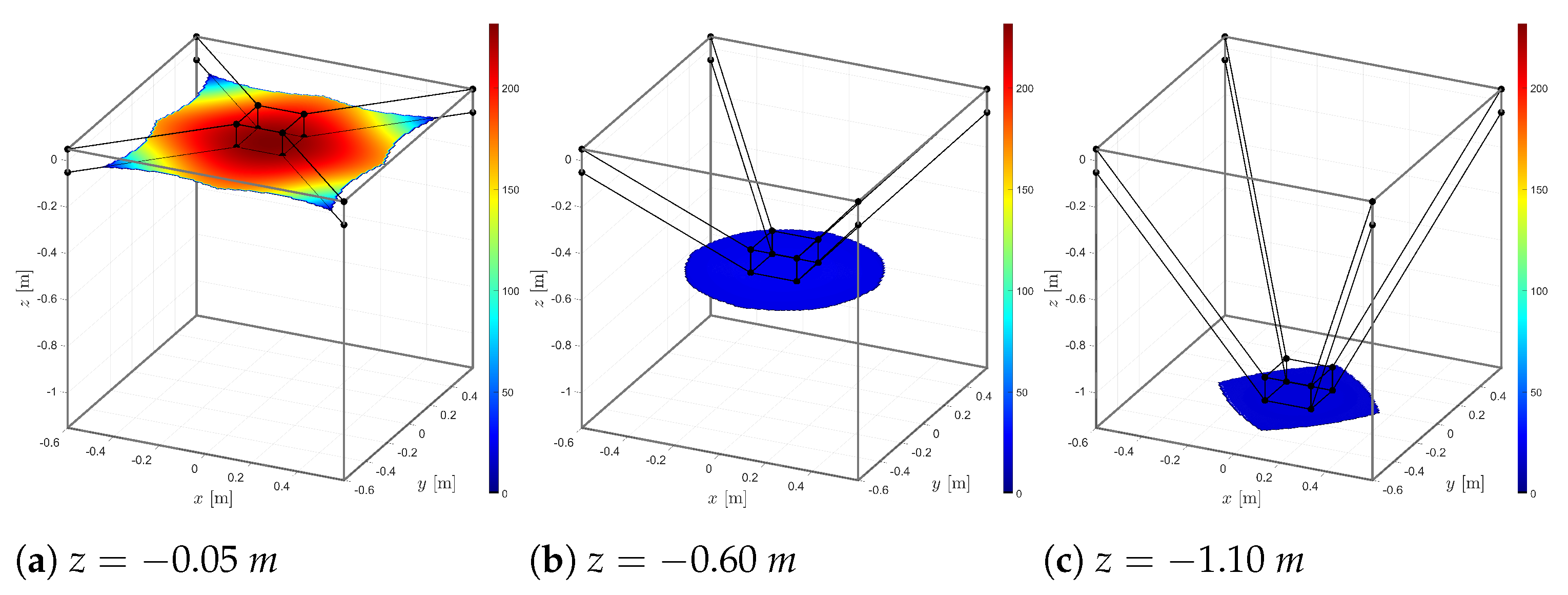
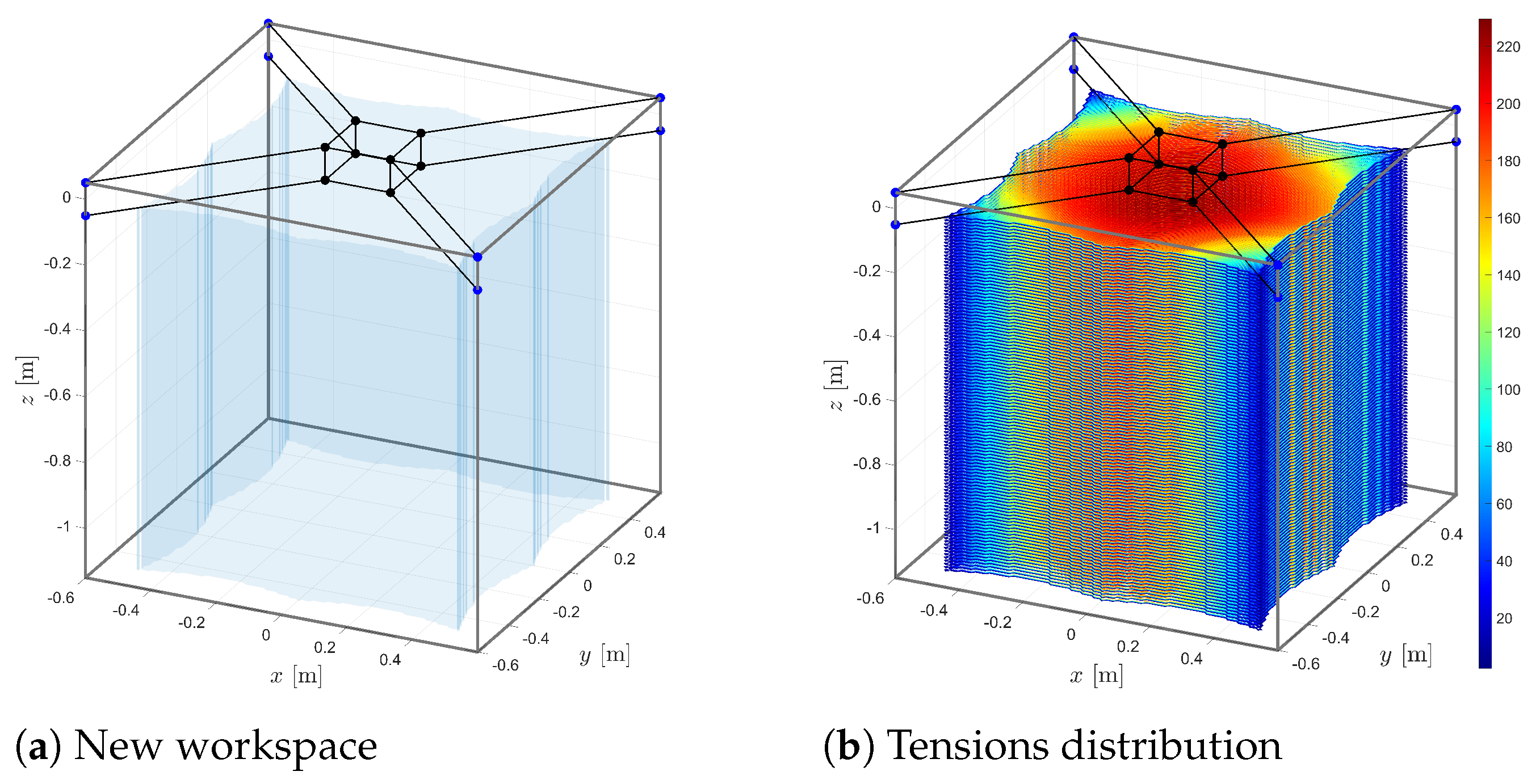
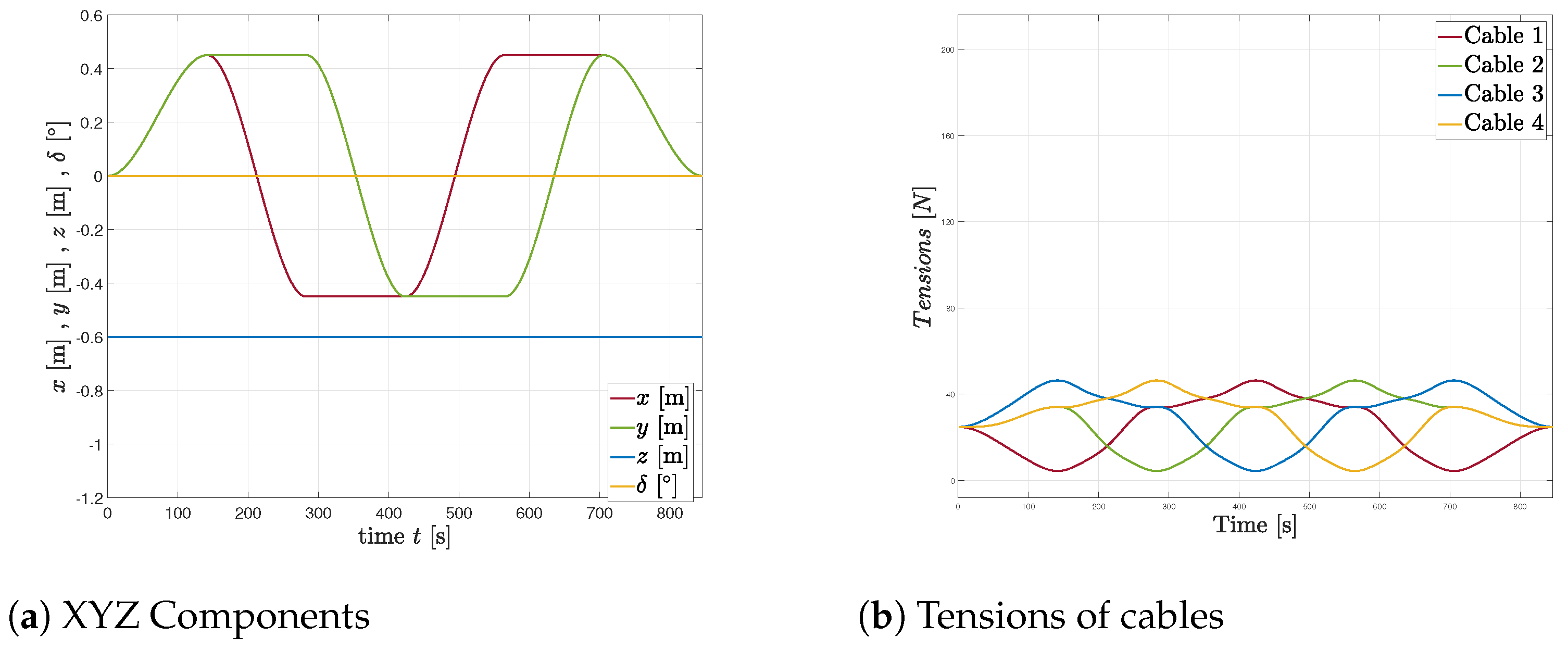
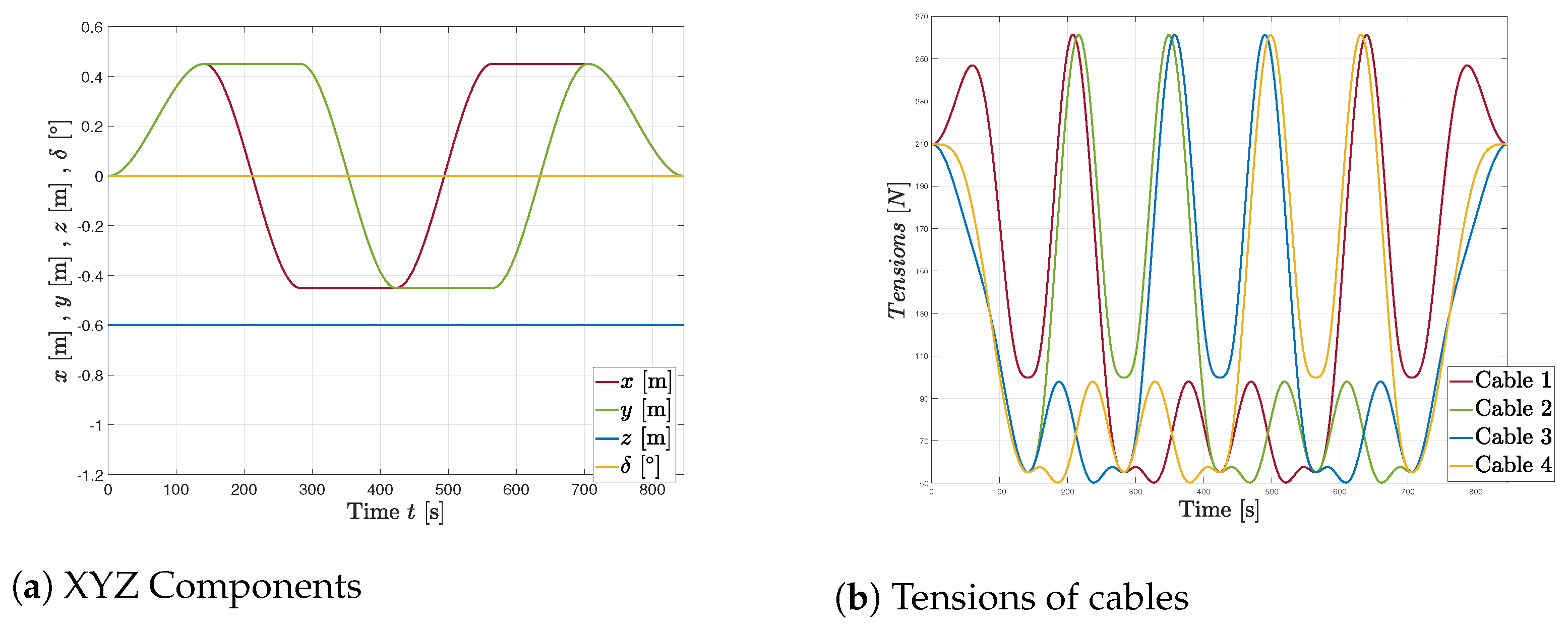
4.1. Workspace Analysis and Force Distributions
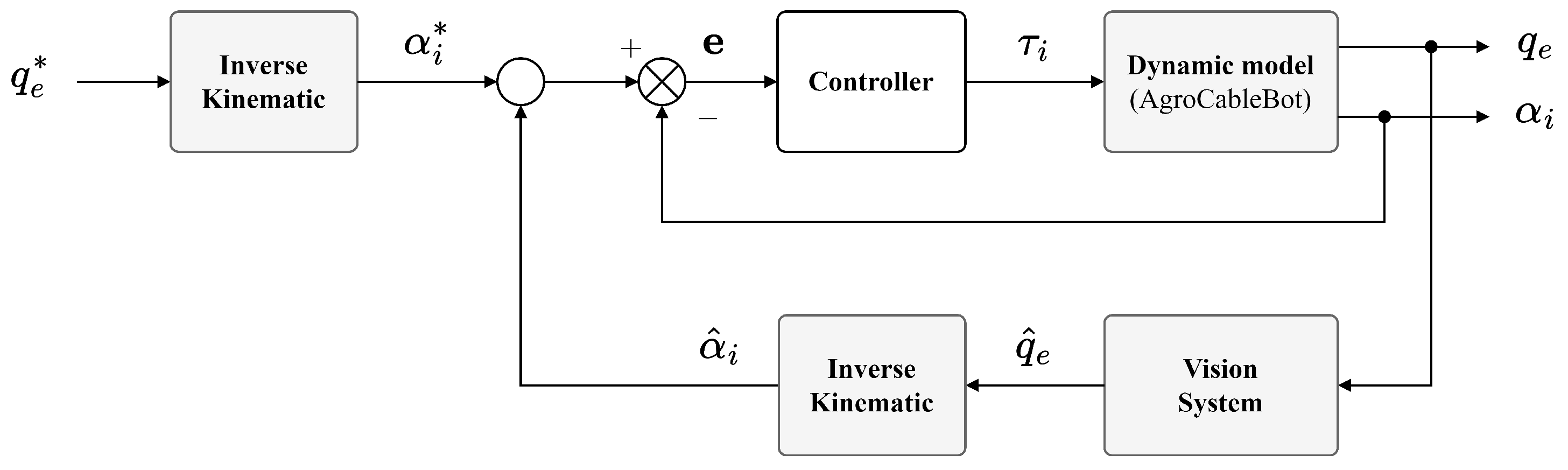
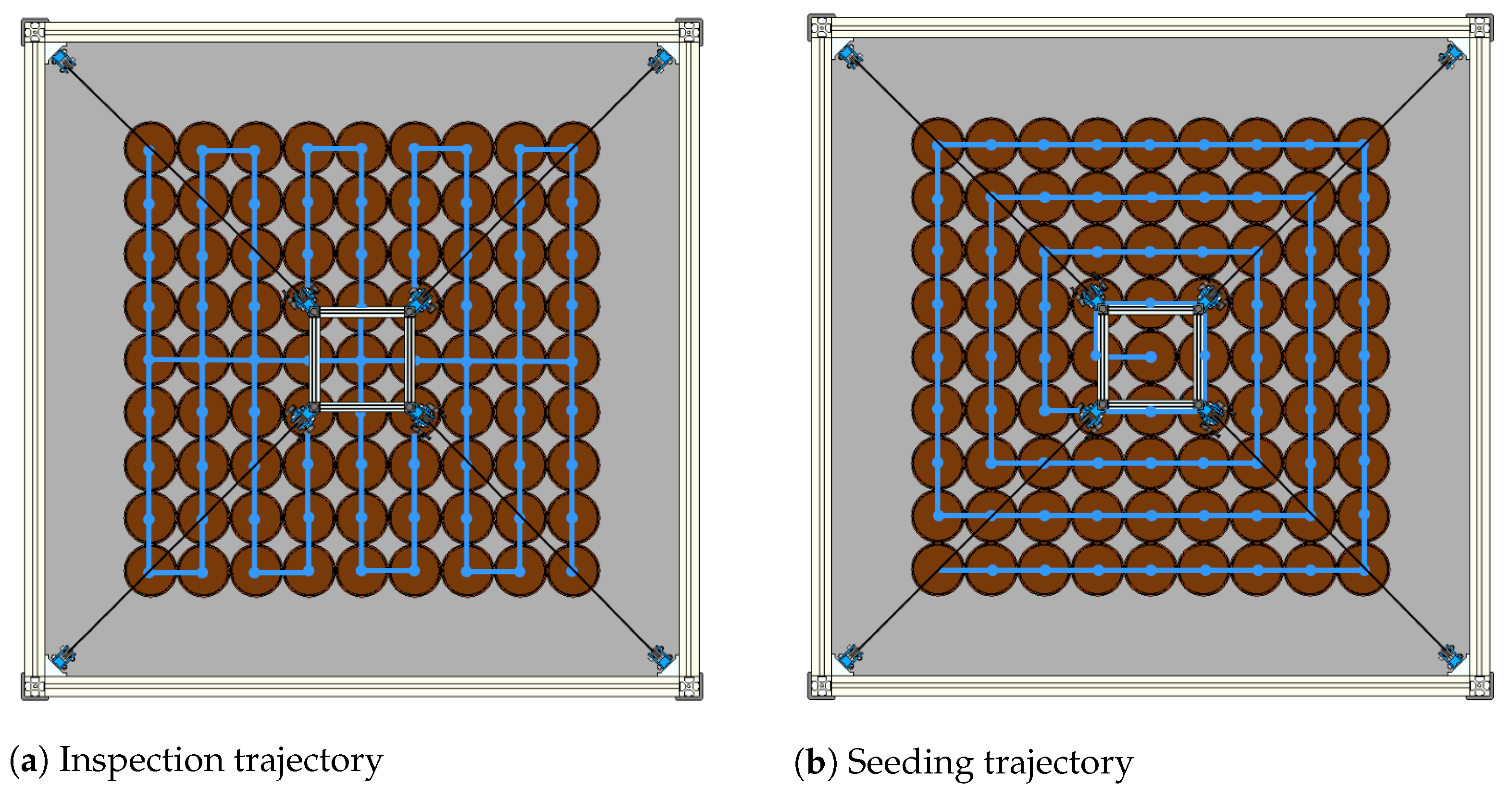
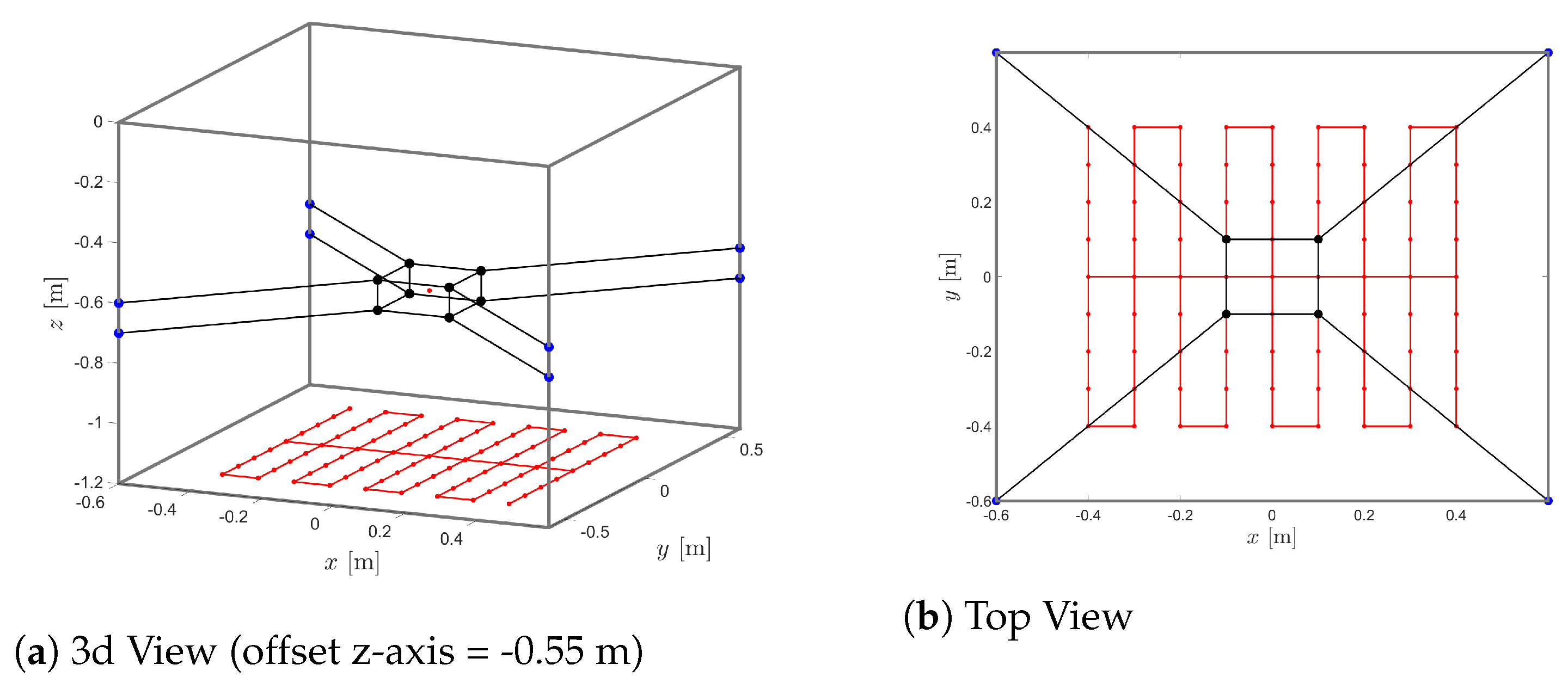
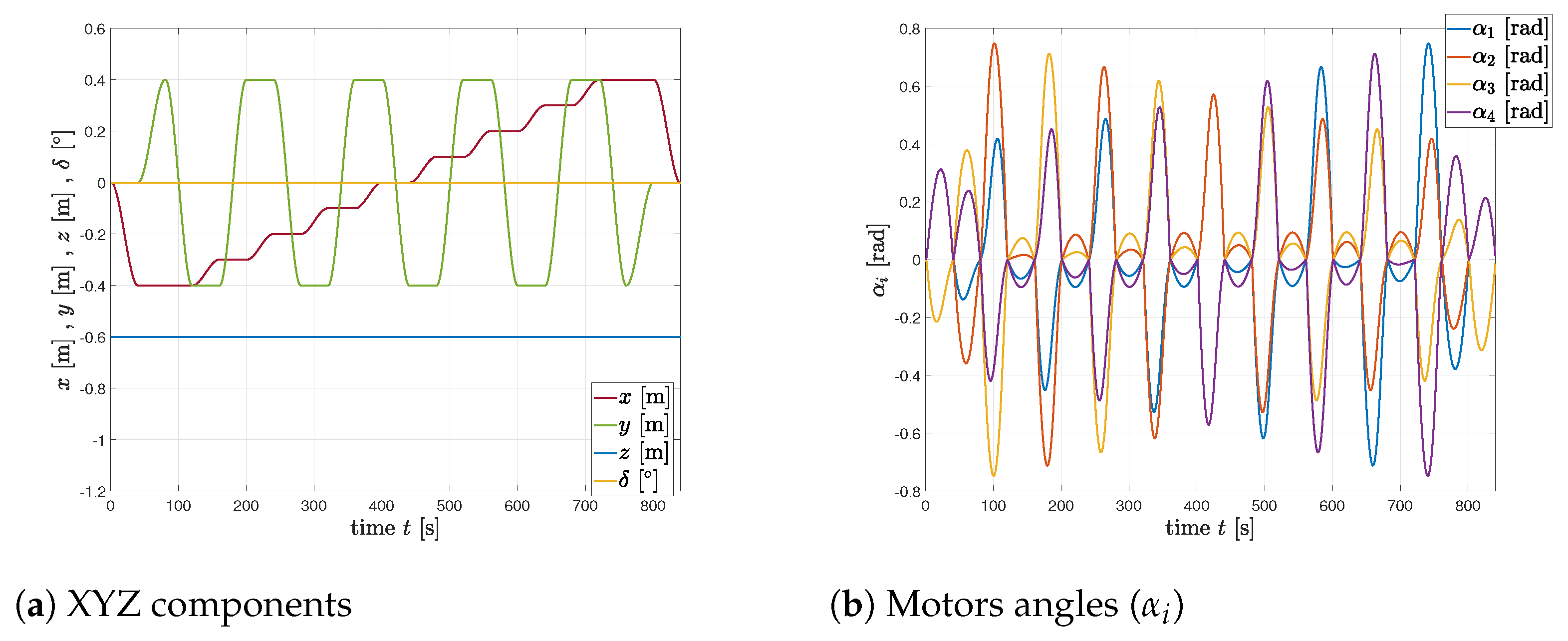
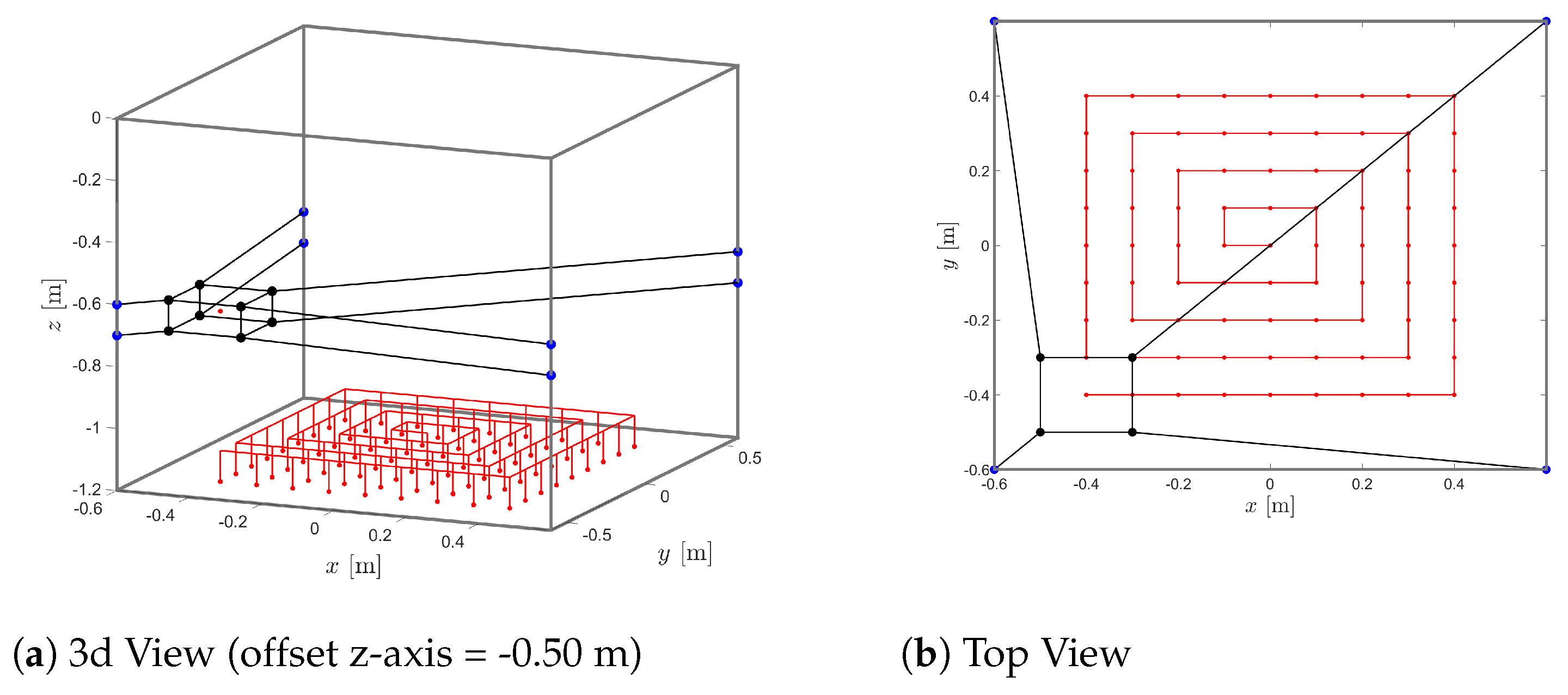
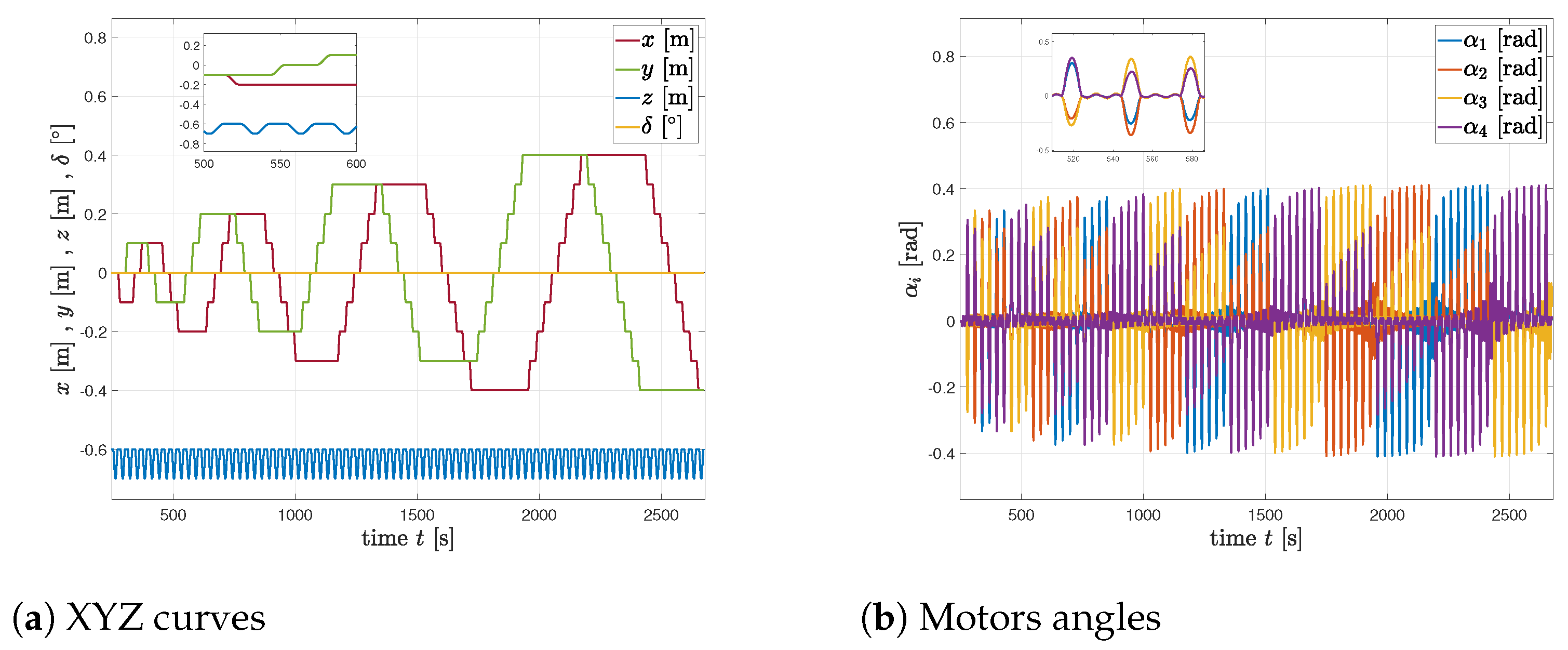
4.2. Control Scheme and Trajectories Generator
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| CDPR | Cable-Driven Parallel Robot |
| WCW | Wrench-Closure Workspace |
| WFW | Wrench-Feasble Workspace |
References
- Pott, A. Cable-Driven Parallel Robots: Theory and Application; Springer International Publishing: Berlin/Heidelberg, Germany, 2018; p. 475. [Google Scholar] [CrossRef]
- Hamann, M.; Nüsse, P.M.; Winter, D.; Ament, C. Towards a precise cable-driven parallel robot-a model-driven parameter identification enhanced by data-driven position correction. In Cable-Driven Parallel Robots. CableCon 2019; Springer: Berlin/Heidelberg, Germany, 2019; pp. 367–376. [Google Scholar] [CrossRef]
- Zhang, B.; Shang, W.; Cong, S.; Li, Z. Coordinated dynamic control in the task space for redundantly actuated cable-driven parallel robots. IEEE/ASME Trans. Mech. 2020, 26, 2396–2407. [Google Scholar] [CrossRef]
- Zi, B.; Duan, B.; Du, J.; Bao, H. Dynamic modeling and active control of a cable-suspended parallel robot. Mechatronics 2008, 18, 1–12. [Google Scholar] [CrossRef]
- Rasheed, T.; Long, P.; Caro, S. Wrench-feasible workspace of mobile cable-driven parallel robots. J. Mech. Robot. 2020, 12. [Google Scholar] [CrossRef]
- Tho, T.P.; Thinh, N.T. Using a Cable-Driven Parallel Robot with Applications in 3D Concrete Printing. Appl. Sci. 2021, 11, 563. [Google Scholar] [CrossRef]
- González-Rodríguez, A.; Martín-Parra, A.; Juárez-Pérez, S.; Rodríguez-Rosa, D.; Moya-Fernández, F.; Castillo-García, F.J.; Rosado-Linares, J. Dynamic Model of a Novel Planar Cable Driven Parallel Robot with a Single Cable Loop. Actuators 2023, 12, 200. [Google Scholar] [CrossRef]
- Castillo-Garcia, F.J.; Rubio-Gómez, G.; Juárez, S.; Rodríguez-Rosa, D.; Bravo, E.; Ottaviano, E.; Gonzalez-Rodriguez, A. Addition of passive-carriage for increasing workspace of cable robots: Automated inspection of surfaces of civil infrastructures. Smart Struct. Syst. Int. J. 2021, 27, 387–396. [Google Scholar]
- Mattioni, V.; Idà, E.; Carricato, M. Force-distribution sensitivity to cable-tension errors in overconstrained cable-driven parallel robots. Mech. Mach. Theory 2022, 175, 104940. [Google Scholar] [CrossRef]
- Izard, J.B.; Gouttefarde, M.; Michelin, M.; Tempier, O.; Baradat, C. A Reconfigurable Robot for Cable-Driven Parallel Robotic Research and Industrial Scenario Proofing. In Cable-Driven Parallel Robots; Springer: Berlin/Heidelberg, Germany, 2013; pp. 135–148. [Google Scholar] [CrossRef]
- Fedorov, D.; Birglen, L. Differential noncircular pulleys for cable robots and static balancing. J. Mech. Robot. 2018, 10, 061001. [Google Scholar] [CrossRef]
- Gueners, D.; Chanal, H.; Bouzgarrou, B.C. Design and implementation of a cable-driven parallel robot for additive manufacturing applications. Mechatronics 2022, 86, 102874. [Google Scholar] [CrossRef]
- Abbasnejad, G.; Tale-Masouleh, M. Optimal wrench-closure configuration of spatial reconfigurable cable-driven parallel robots. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2021, 235, 4049–4056. [Google Scholar] [CrossRef]
- Li, C.; Huang, J.; Su, M.; Wu, D.; Xu, P.; Xie, Y.; Meng, F.; Wen, H.; Tian, H.; Duan, X. Reconfigurable cable-driven parallel robot with adjustable workspace towards positioning in neurosurgery: A preliminary design. In Proceedings of the 2021 IEEE International Conference on Real-time Computing and Robotics (RCAR), Xining, China, 15–19 July 2021; pp. 51–56. [Google Scholar] [CrossRef]
- Li, J.; Wang, K.; Wang, Y.; Wang, C. Motion Planning for a Cable-Driven Lower Limb Rehabilitation Robot with Movable Distal Anchor Points. J. Bionic Eng. 2023, 20, 1585–1596. [Google Scholar] [CrossRef]
- Cui, Z.; Tang, X. Analysis of stiffness controllability of a redundant cable-driven parallel robot based on its configuration. Mechatronics 2021, 75, 102519. [Google Scholar] [CrossRef]
- García-Vanegas, A.; Leiton-Murcia, C.; Forero, M.G.; Gonzalez-Rodríguez, A.; Castillo-García, F. Cable-Driven Parallel Robot Controlled by Servo-Vision System. In Pattern Recognition. MCPR 2022; Springer: Berlin/Heidelberg, Germany, 2022; pp. 291–302. [Google Scholar] [CrossRef]
- Mattioni, V.; Ida’, E.; Carricato, M. Design of a planar cable-driven parallel robot for non-contact tasks. Appl. Sci. 2021, 11, 9491. [Google Scholar] [CrossRef]
- Tourajizadeh, H.; Yousefzadeh, M.; Khalaji, A.K.; Bamdad, M. Design, modeling and control of a simulator of an aircraft maneuver in the wind tunnel using cable robot. Int. J. Control Autom. Syst. 2022, 20, 1671–1681. [Google Scholar] [CrossRef]
- Hwang, S.W.; Bak, J.H.; Yoon, J.; Park, J.H. Oscillation reduction and frequency analysis of under-constrained cable-driven parallel robot with three cables. Robotica 2020, 38, 375–395. [Google Scholar] [CrossRef]
- Youssef, K.; Otis, M.J.D. Reconfigurable fully constrained cable driven parallel mechanism for avoiding interference between cables. Mech. Mach. Theory 2020, 148, 103781. [Google Scholar] [CrossRef]
- Gouttefarde, M.; Krut, S.; Company, O.; Pierrot, F.; Ramdani, N. On the design of fully constrained parallel cable-driven robots. In Advances in Robot Kinematics: Analysis and Design; Springer: Berlin/Heidelberg, Germany, 2008; pp. 71–78. [Google Scholar]
- Paty, T.; Binaud, N.; Wang, H.; Segonds, S. Sensitivity Analysis of a Suspended Cable-Driven Parallel Robot to Design Parameters. J. Mech. Robot. 2023, 15, 061001. [Google Scholar] [CrossRef]
- Castelli, G.; Ottaviano, E.; González, A. Analysis and simulation of a new Cartesian cable-suspended robot. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2010, 224, 1717–1726. [Google Scholar] [CrossRef]
- Gonzalez-Rodriguez, A.; Castillo-Garcia, F.; Ottaviano, E.; Rea, P.; Gonzalez-Rodriguez, A. On the effects of the design of cable-Driven robots on kinematics and dynamics models accuracy. Mechatronics 2017, 43, 18–27. [Google Scholar] [CrossRef]
- Castillo-Garcia, F.; Rea, P.; Gonzalez-Rodriguez, A.; Ottaviano, E. On the Design of a 4 Degrees-of-Freedom Pick and Place Cable Suspended Parallel Manipulator. Int. J. Robot. Autom. (IJRA) 2017, 6, 286–302. [Google Scholar] [CrossRef]
- An, H.; Yuan, H.; Tang, K.; Xu, W.; Wang, X. A Novel Cable-Driven Parallel Robot With Movable Anchor Points Capable for Obstacle Environments. IEEE/ASME Trans. Mechatr. 2022, 27, 5472–5483. [Google Scholar] [CrossRef]
- Wu, W. DC motor identification using speed step responses. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 1937–1941. [Google Scholar]
- Ottaviano, E.; Castelli, G. A study on the effects of cable mass and elasticity in cable-based parallel manipulators. In ROMANSY 18 Robot Design, Dynamics and Control: Proceedings of The Eighteenth CISM-IFToMM Symposium; Springer: Berlin/Heidelberg, Germany, 2010; pp. 149–156. [Google Scholar]
- Shiang, W.J.; Cannon, D.; Gorman, J. Optimal force distribution applied to a robotic crane with flexible cables. In Proceedings of the 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No.00CH37065), San Francisco, CA, USA, 24–28 April 2002; Volume 2, pp. 1948–1954. [Google Scholar] [CrossRef]
- Pham, C.B.; Yang, G.; Yeo, S.H. Dynamic analysis of cable-driven parallel mechanisms. In Proceedings of the 2005 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Monterey, CA, USA, 24–28 July 2005; pp. 612–617. [Google Scholar] [CrossRef]
- Oh, S.R.; Agrawal, S. Cable suspended planar robots with redundant cables: Controllers with positive tensions. IEEE Trans. Robot. 2005, 21, 457–465. [Google Scholar] [CrossRef]
- Borgstrom, P.H.; Jordan, B.L.; Sukhatme, G.S.; Batalin, M.A.; Kaiser, W.J. Rapid Computation of Optimally Safe Tension Distributions for Parallel Cable-Driven Robots. IEEE Trans. Robot. 2009, 25, 1271–1281. [Google Scholar] [CrossRef]
- Agahi, M.; Notash, L. Redundancy Resolution of Wire-Actuated Parallel Manipulators. Trans. Can. Soc. Mech. Eng. 2009, 33, 561–573. [Google Scholar] [CrossRef]
- Berti, A. Kinematics and Statics of Cable-Driven Parallel Robots by Interval-Analysis-Based Methods. Ph.D. Thesis, Universitá Degli Studi di Bologna, Bologna, Italy, 2015. [Google Scholar] [CrossRef]
- Diao, X.; Ma, O.; Lu, Q. Singularity Analysis of Planar Cable-Driven Parallel Robots. In Proceedings of the 2008 IEEE Conference on Robotics, Automation and Mechatronics, Chengdu, China, 21–24 September 2008; pp. 272–277. [Google Scholar] [CrossRef]
- Pott, A.; Bruckmann, T.; Mikelsons, L. Closed-form Force Distribution for Parallel Wire Robots. In Computational Kinematics: Proceedings of the 5th International Workshop on Computational Kinematics; Kecskeméthy, A., Müller, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 25–34. [Google Scholar] [CrossRef]
- Gouttefarde, M.; Merlet, J.P.; Daney, D. Determination of the wrench-closure workspace of 6-DOF parallel cable-driven mechanisms. In Advances in Robot Kinematics: Mechanisms and Motion; Lennarčič, J., Roth, B., Eds.; Springer: Dordrecht, Germany, 2006; pp. 315–322. [Google Scholar] [CrossRef]
- Bolboli, J.; Khosravi, M.A.; Abdollahi, F. Stiffness feasible workspace of cable-driven parallel robots with application to optimal design of a planar cable robot. Robot. Auton. Syst. 2019, 114, 19–28. [Google Scholar] [CrossRef]
- Juárez-Pérez, S.; Martín-Parra, A.; Arena, A.; Ottaviano, E.; Gattulli, V.; Castillo-García, F.J. Dynamic Control of a Novel Planar Cable-Driven Parallel Robot with a Large Wrench Feasible Workspace. Actuators 2022, 11, 367. [Google Scholar] [CrossRef]
- García-Vanegas, A.; Liberato-Tafur, B.; Forero, M.G.; Gonzalez-Rodríguez, A.; Castillo-García, F. Automatic Vision Based Calibration System for Planar Cable-Driven Parallel Robots. In Pattern Recognition and Image Analysis; Morales, A., Fierrez, J., Sánchez, J.S., Ribeiro, B., Eds.; Springer: Cham, Switzerland, 2019; pp. 600–609. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Frame (fixed platform) | ||
| Length, L | 1.2 | m |
| Width, W | 1.2 | m |
| Height, H | 1.2 | m |
| End-Effector (mobile platform) | ||
| Length, l | 0.2 | m |
| Width, w | 0.2 | m |
| Height, h | 0.1 | m |
| Mass, m | 5 | kg |
| Rotational Inertia, | 14.36 | kg ·m |
| Cable and drum | ||
| Cable diameter | 0.66 | mm |
| Type of cable | Dyneema, SS250G-1500 | - |
| Drum effective radius, r | 40.10 | mm |
| Actuators | ||
| Rotational Inertia, J | kg ·m | |
| Viscous friction coefficient, | N·ms | |
| Gear transmission, n | 26:1 | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
García-Vanegas, A.; García-Bonilla, M.J.; Forero, M.G.; Castillo-García, F.J.; Gonzalez-Rodriguez, A. AgroCableBot: Reconfigurable Cable-Driven Parallel Robot for Greenhouse or Urban Farming Automation. Robotics 2023, 12, 165. https://doi.org/10.3390/robotics12060165
García-Vanegas A, García-Bonilla MJ, Forero MG, Castillo-García FJ, Gonzalez-Rodriguez A. AgroCableBot: Reconfigurable Cable-Driven Parallel Robot for Greenhouse or Urban Farming Automation. Robotics. 2023; 12(6):165. https://doi.org/10.3390/robotics12060165
Chicago/Turabian StyleGarcía-Vanegas, Andrés, María J. García-Bonilla, Manuel G. Forero, Fernando J. Castillo-García, and Antonio Gonzalez-Rodriguez. 2023. "AgroCableBot: Reconfigurable Cable-Driven Parallel Robot for Greenhouse or Urban Farming Automation" Robotics 12, no. 6: 165. https://doi.org/10.3390/robotics12060165