
Classical and Heuristic Approaches for Mobile Robot Path Planning: A Survey

Abstract
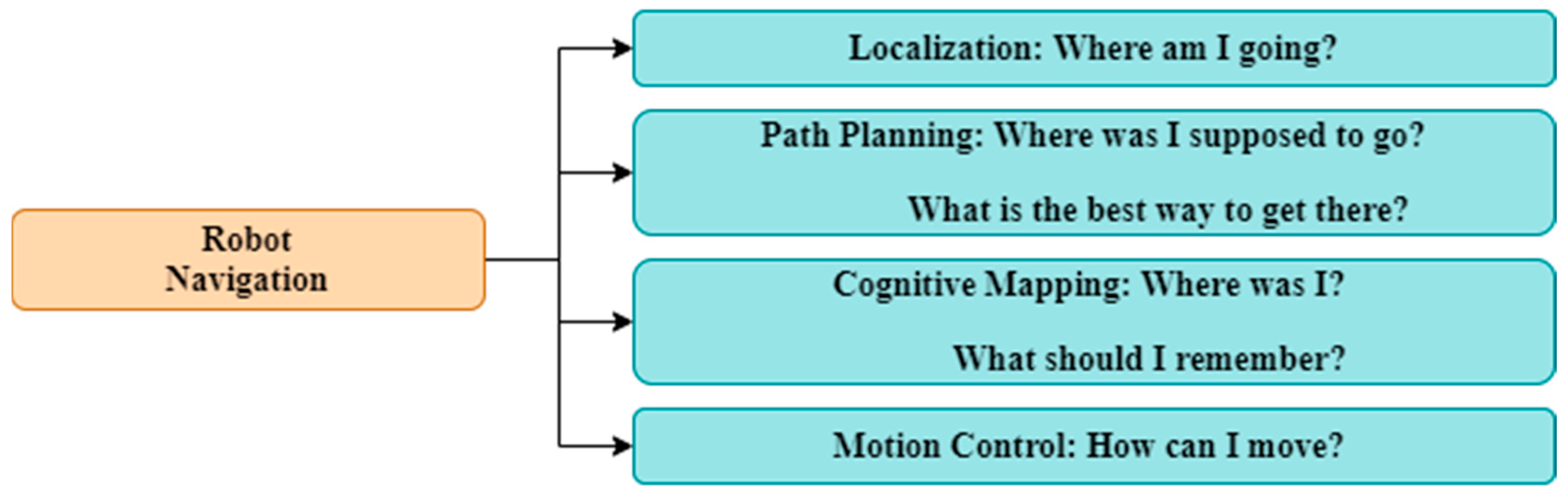
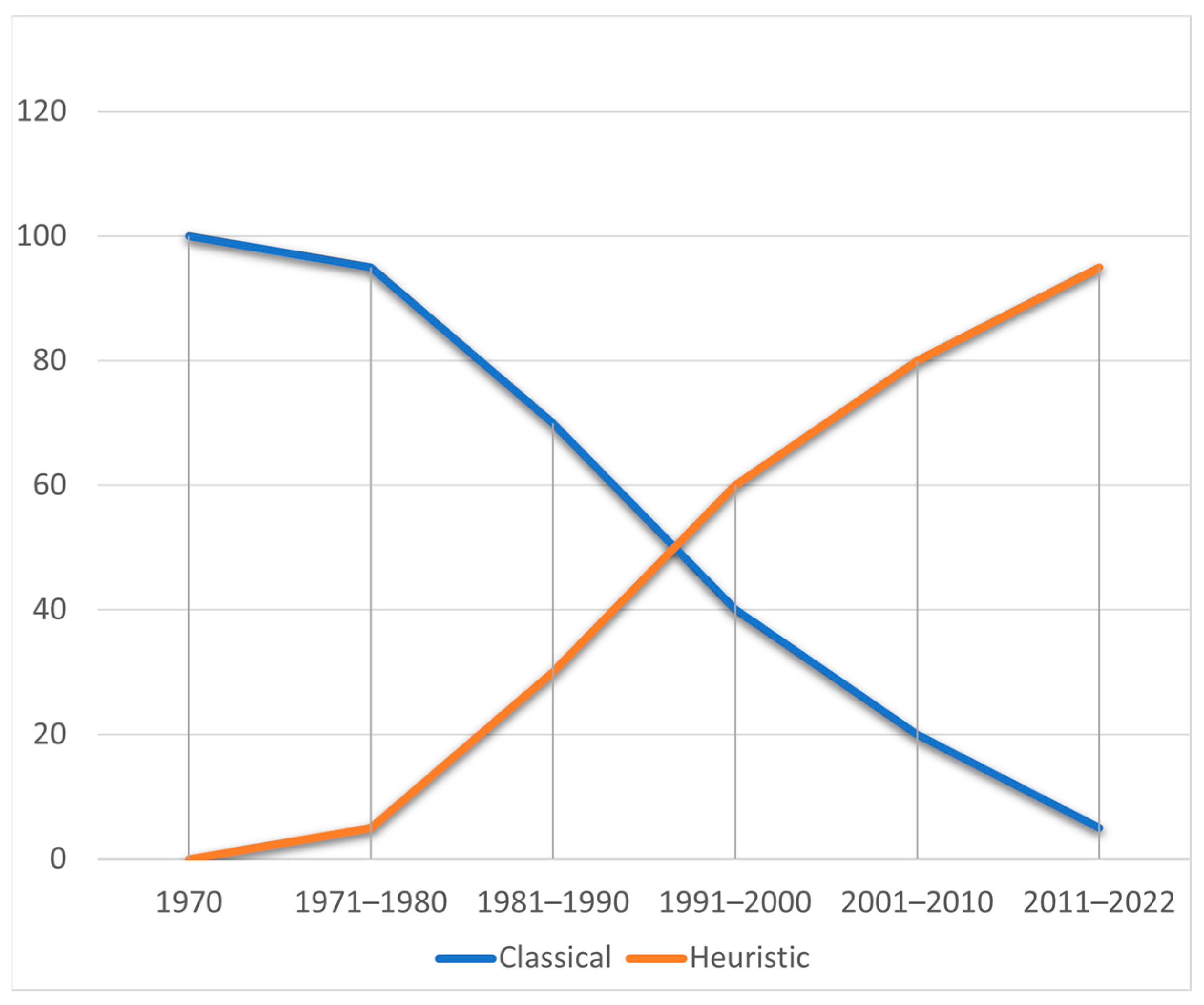
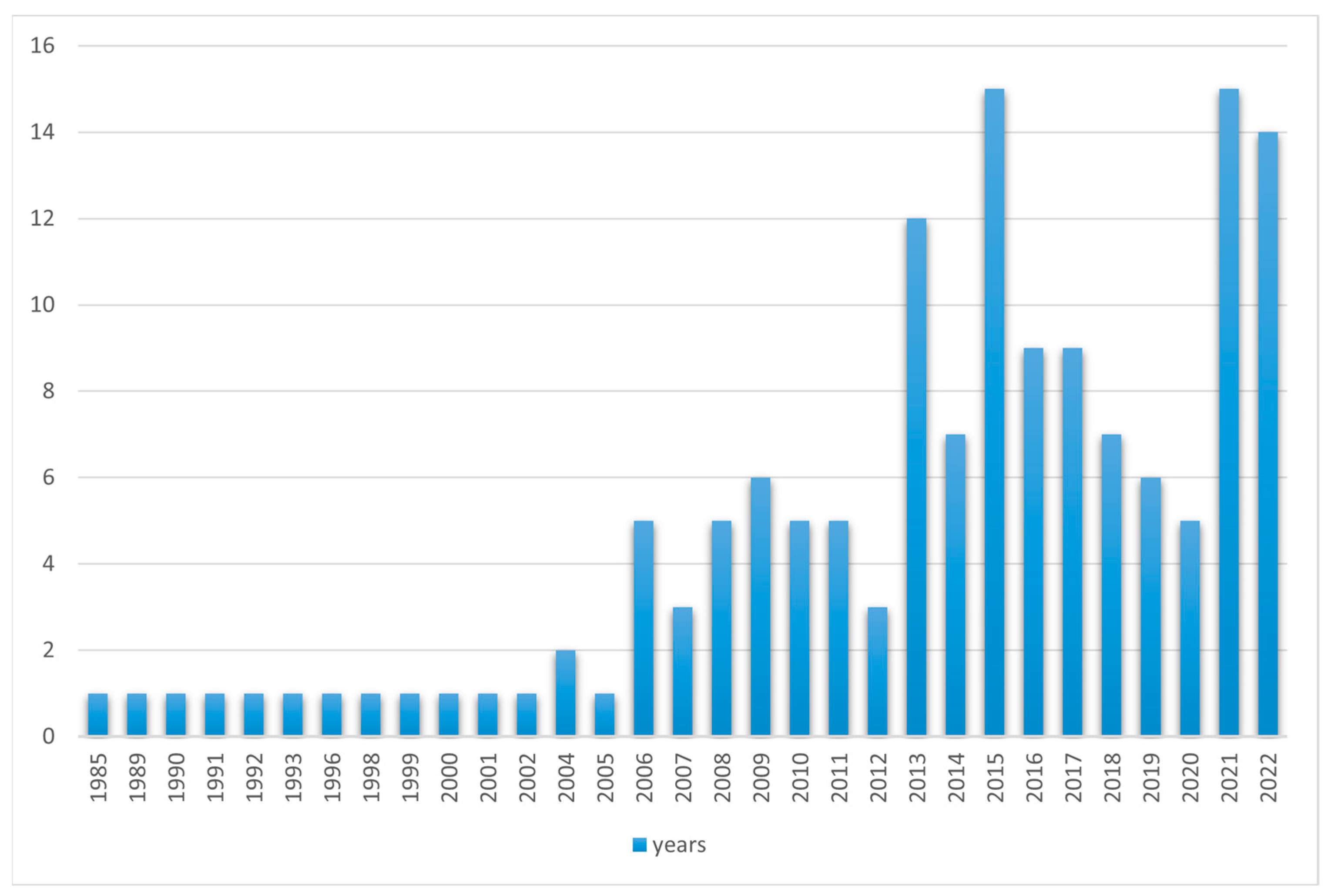
:1. Introduction
- (a)
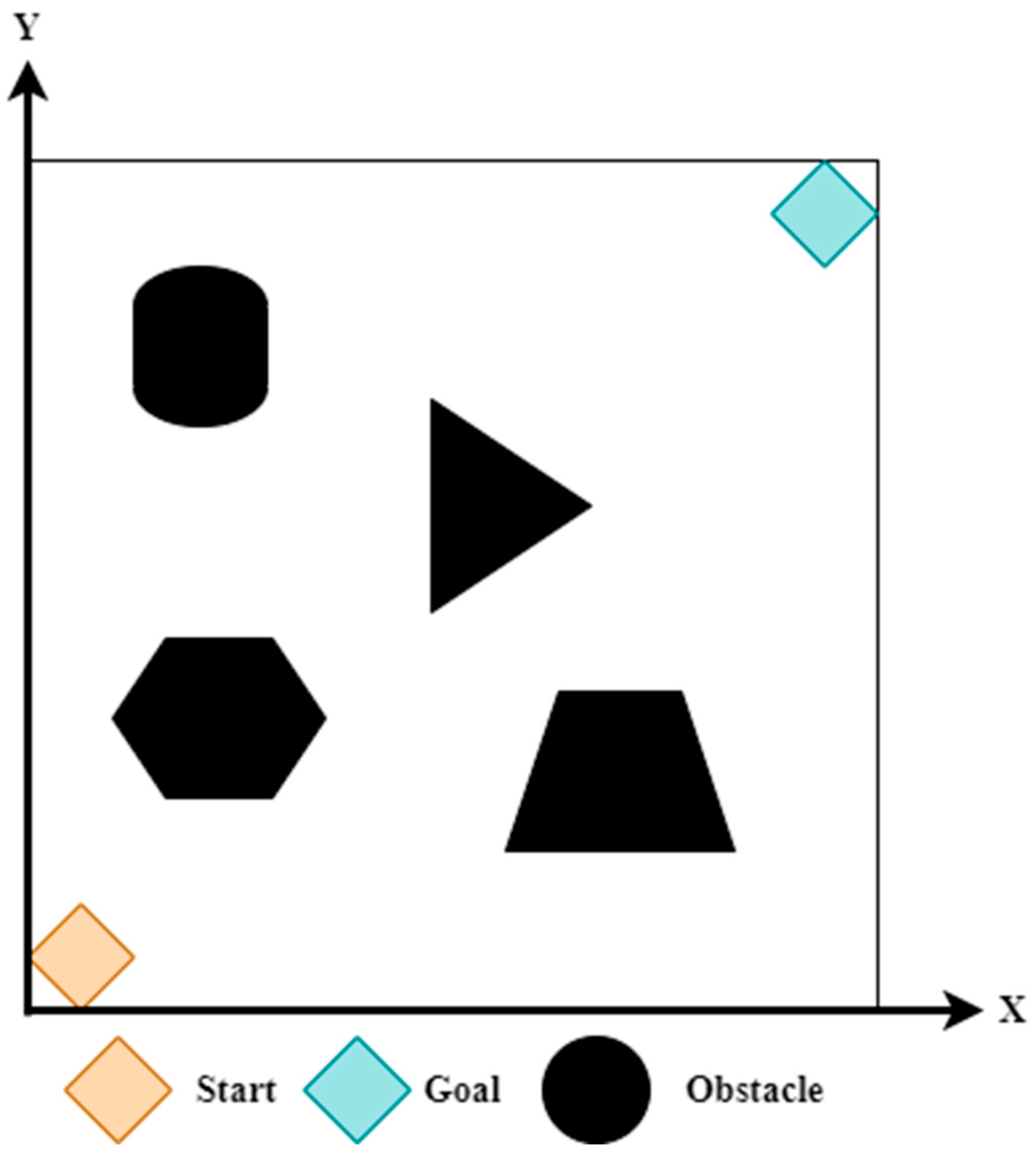
- The RPP with fixed obstacles in a static environment.
- (b)
- The RPP, when faced with both still and moving obstacles in a dynamic environment.
- A description of the robot’s shape, such as whether it has legs, wheels, or no limbs at all (locomotion).
- An explanation of the robot’s environment, including its geometry (2- or 3-dimensional workspace).
- The environment must have a start and goal configuration, between which the robot’s path must be planned.
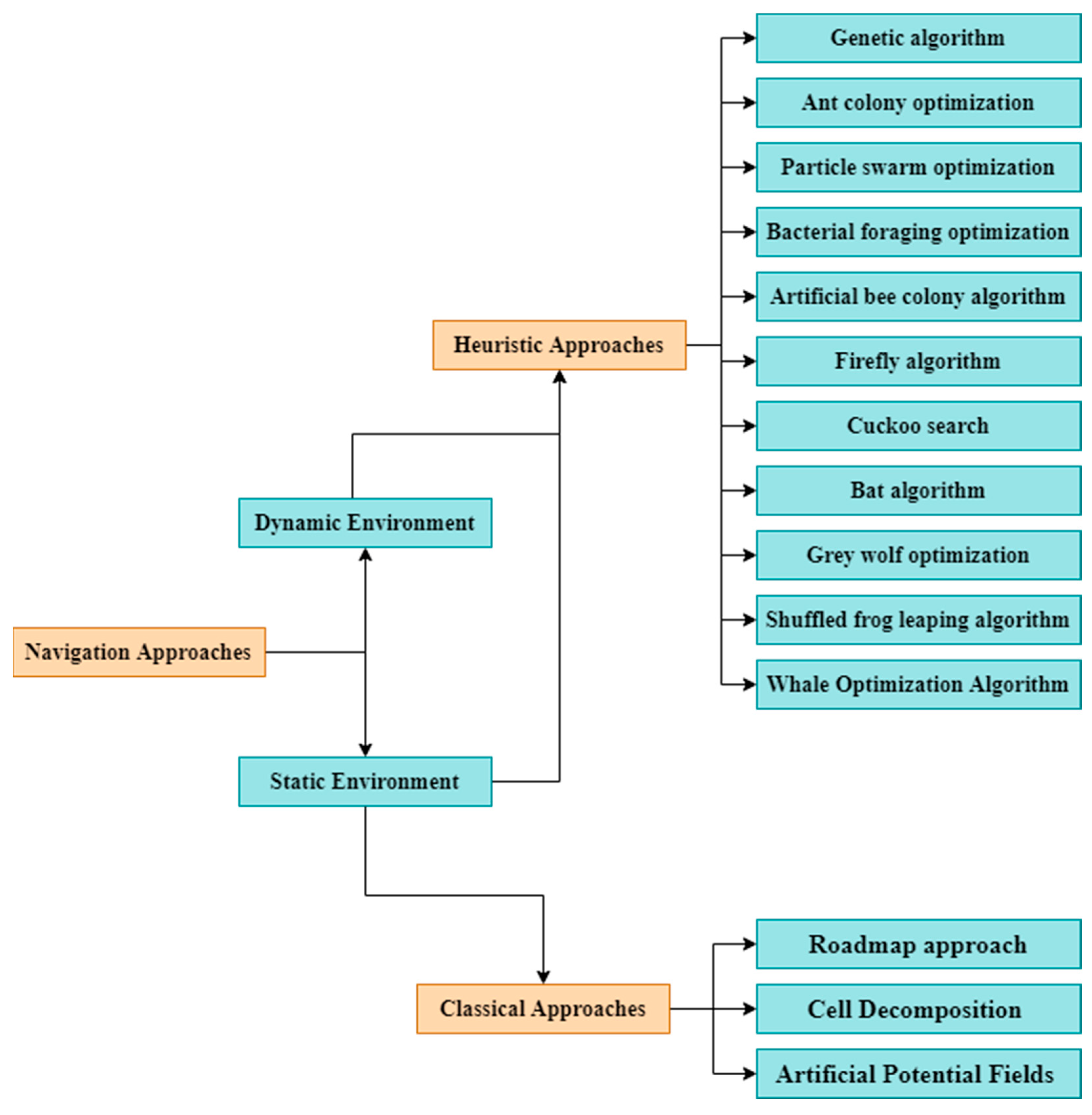
2. Robot Path Planning Techniques
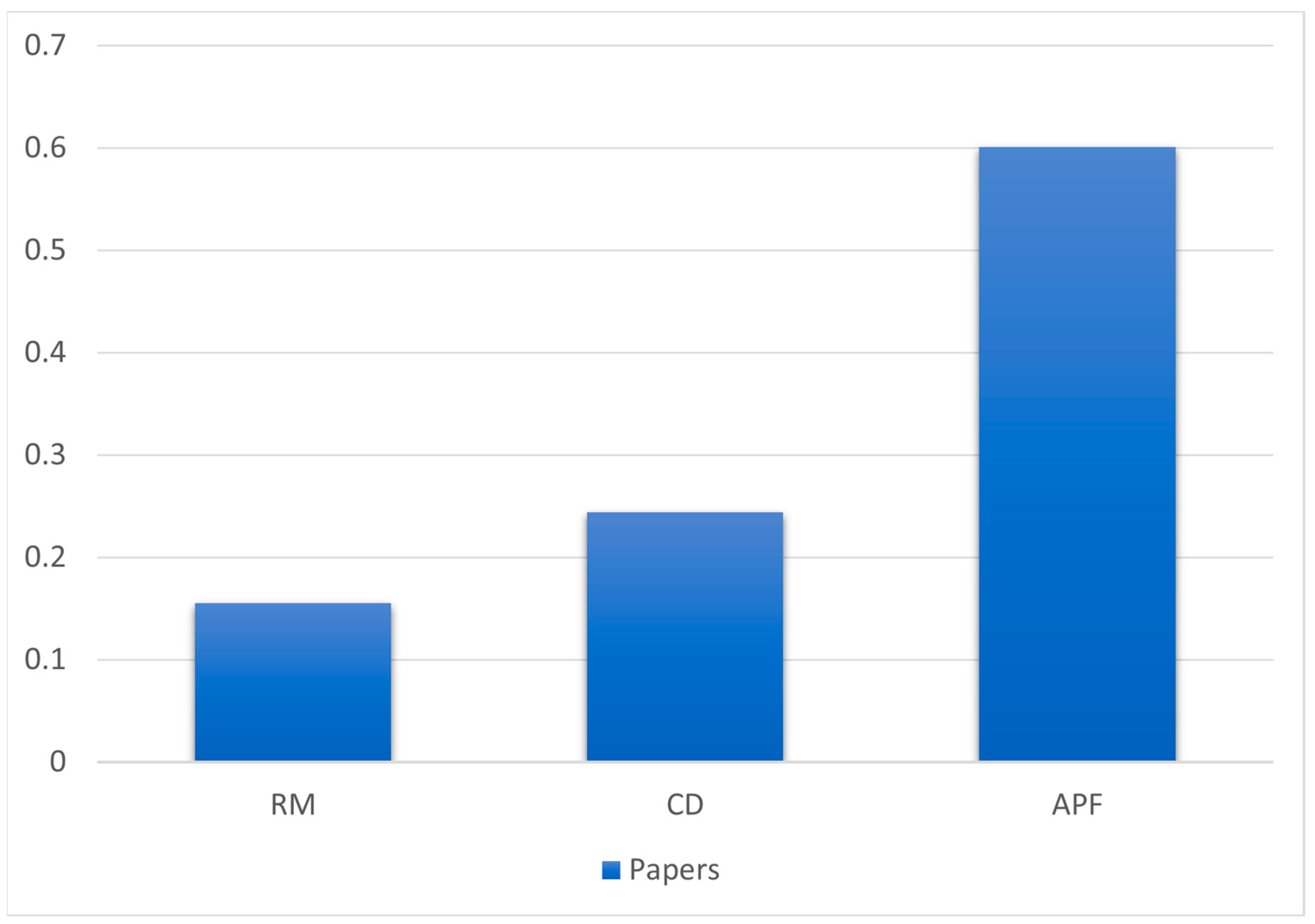
2.1. Classical Approaches
- 1.
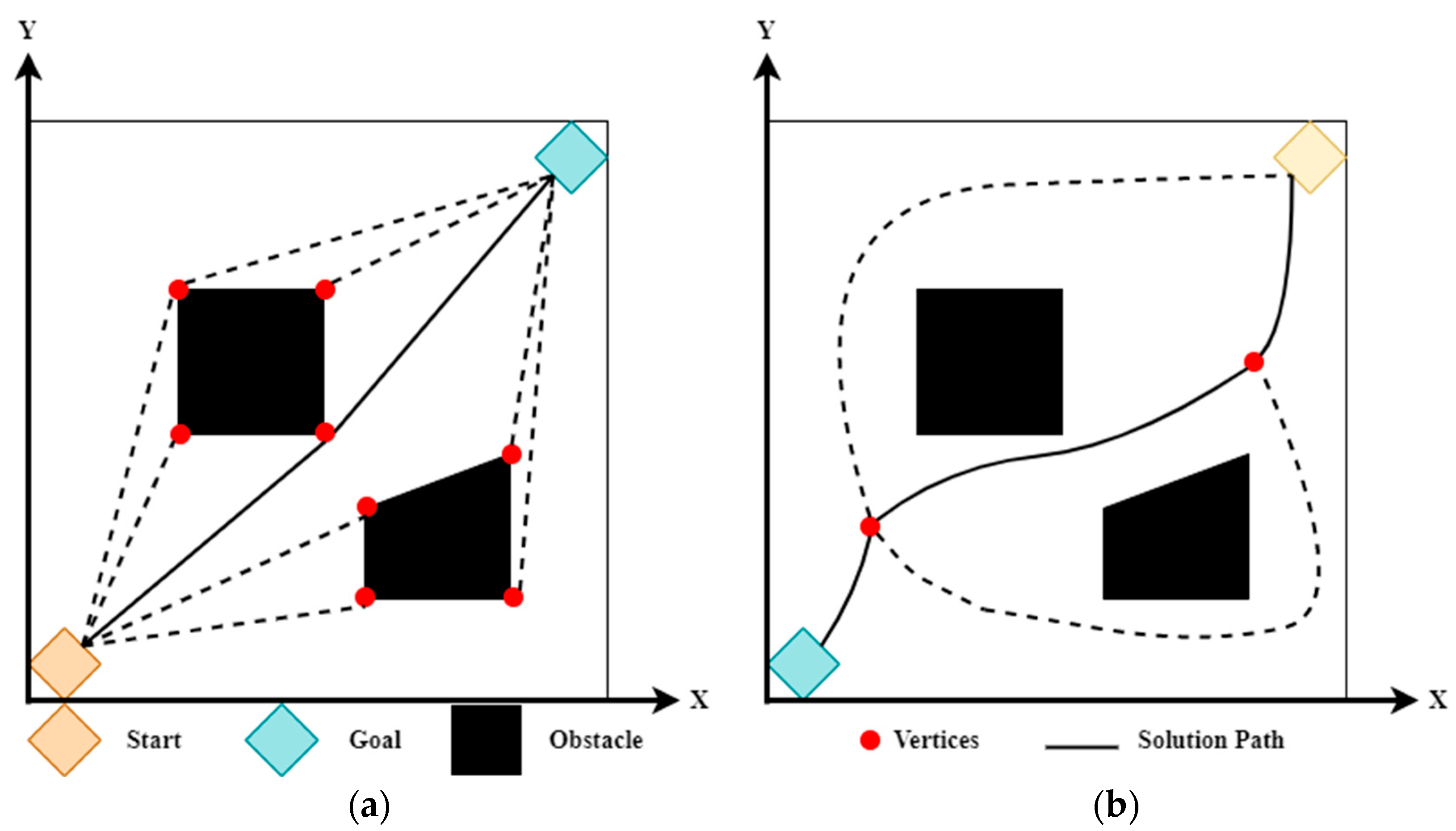
- Roadmap (visibility graph [16]; Voronoi diagram [17]): The roadmap approach (RM) involves the reformulation, reduction, or mapping of the free C-space onto a one-dimensional workspace, as illustrated in Figure 5. Salzman examines the application of the RM for the navigation of autonomous mobile robots [18]. During the planning phase, the configuration space of the robot is randomly generated, resulting in a specific number of nodes. A road map is then constructed by connecting pairs of nodes in a straight line while ensuring that the path does not intersect with any obstacles. Based on the results obtained during the planning stage, the query phase devises a path connecting the initial and target configurations. Enhancements were implemented to the efficient path planning of the Voronoi diagram in order to optimize its performance and mitigate issues, such as abrupt turns and extended loops, as cited in reference [19]. The optimal route is ascertained through the employment of a hybrid approach that amalgamates the visibility graph, Voronoi diagram, and potential field technique, as stated in reference [20]. Scholars have highlighted that the approach fails to identify the optimal pathway and presents challenges in its implementation.
- 2.
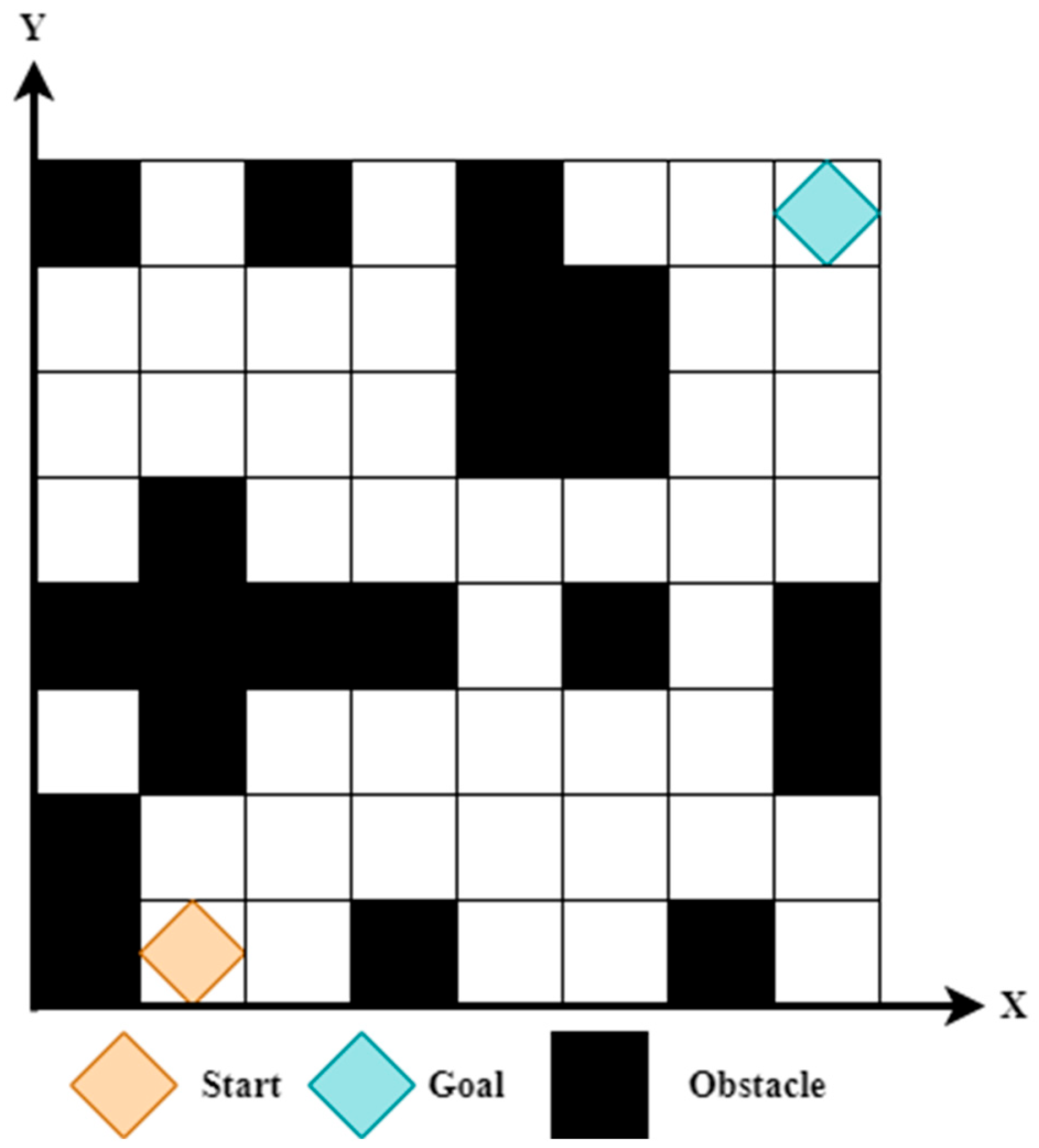
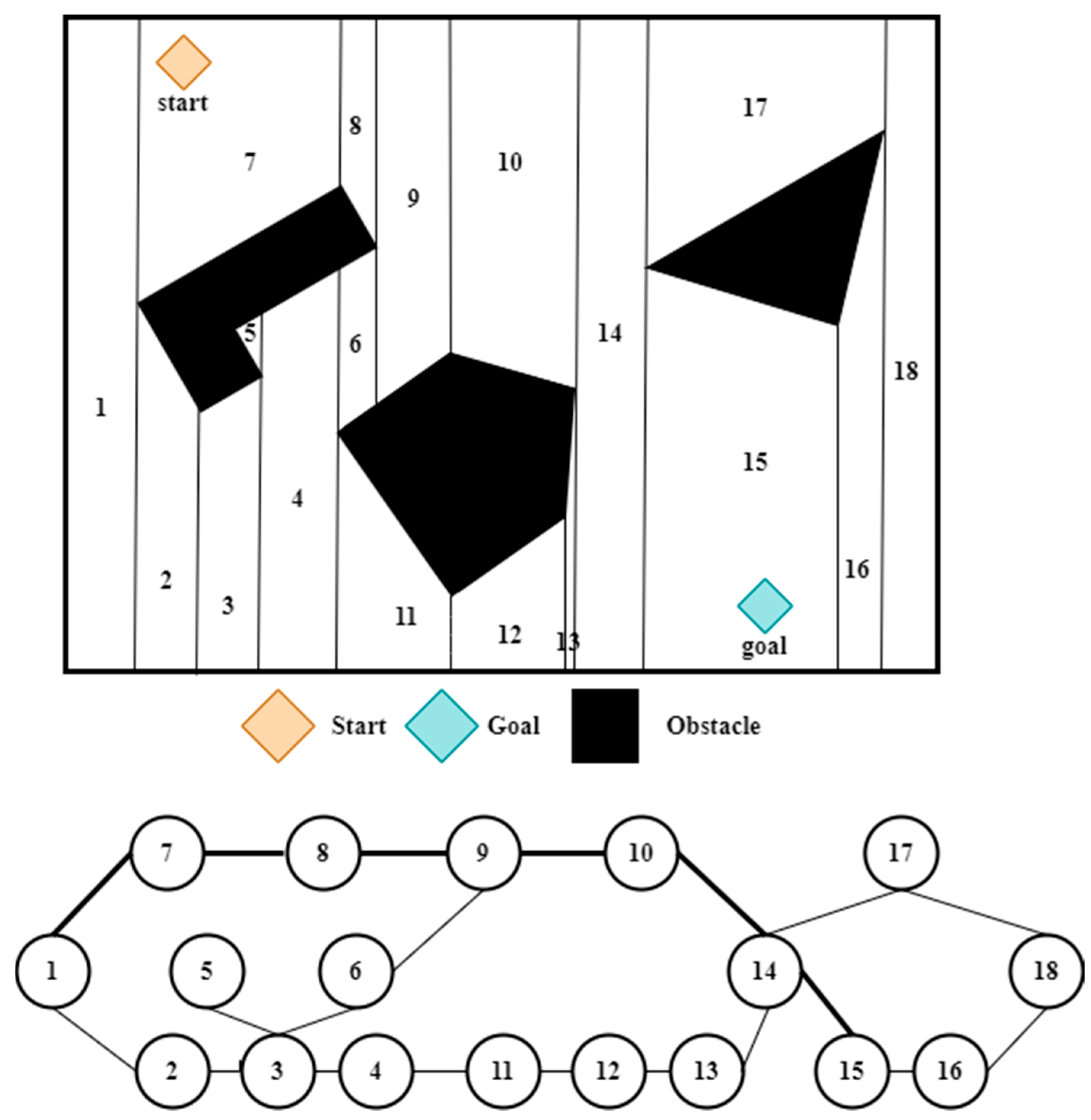
- Cell decomposition (CD) [30]: To determine a route connecting the initial and target configurations, the unobstructed configuration space is partitioned into a collection of compartments. As shown in Figure 6, the establishment of a connection between the commencement and termination cells and the subsequent establishment of a connection via a series of intermediary cells determines the cellular relationships. Samet [31] and Noborio [32] proposed a decomposition utilizing a quadtree. Large grid cells divide the environment; however, when a grid cell is only partially filled, it is broken into four smaller parts of the same size until it is empty. This system’s flaw is its inability to update the program when new information (such as the position of an obstacle) arrives, making it ineffective in dynamic environments. Lingelbach [33] has proven that the high-dimensional static configuration problem with path planning exists. He found a solution to the path-planning issue for robotic platforms that resembled chains and a maze. Using CAD-based data, Sleumer et al. [34] presented a path-planning strategy for mobile robots.
- 3.
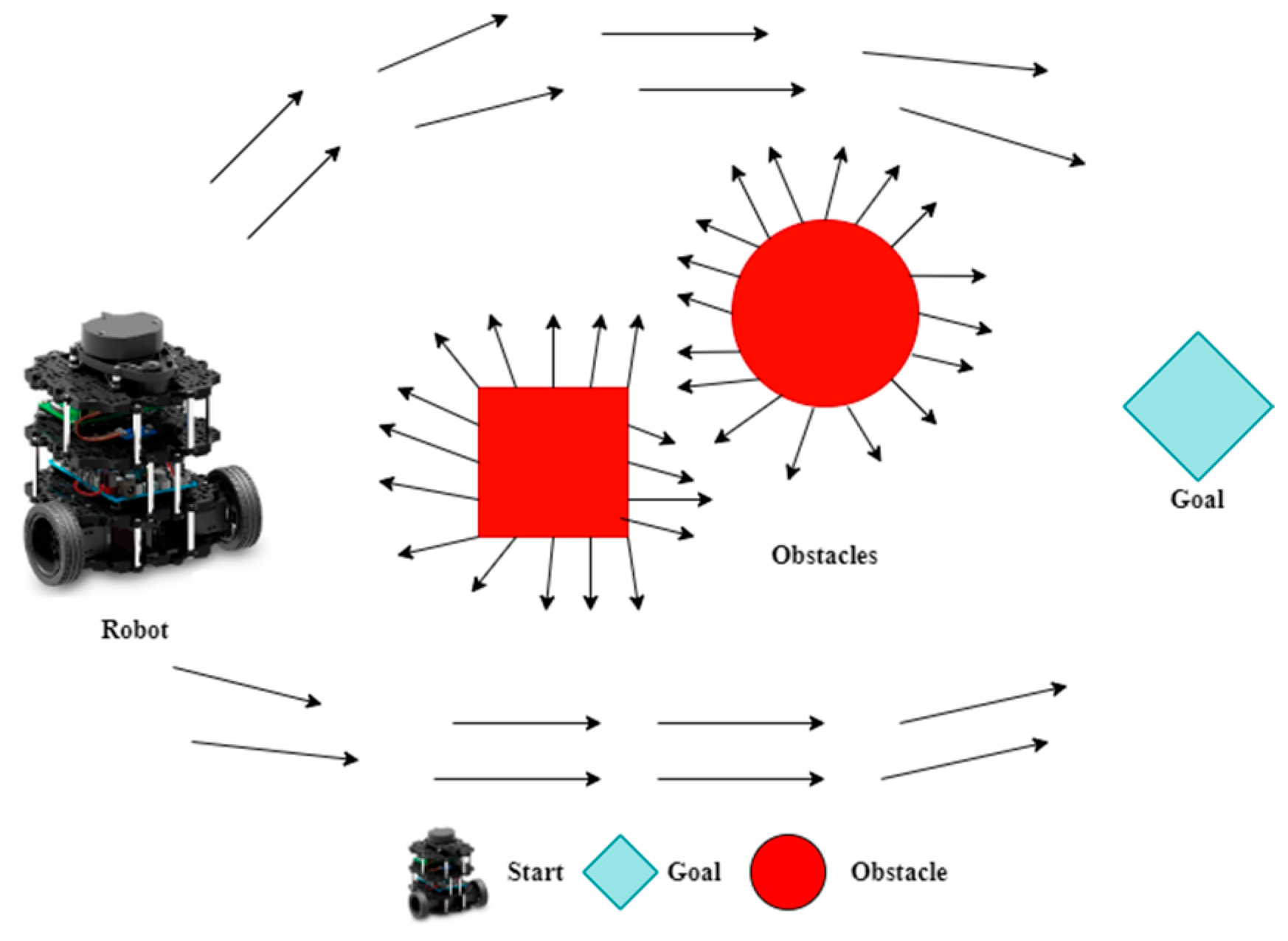
- Artificial potential fields (APFs): The present approach involves a configuration space that comprises two distinct forces, namely a repulsive force that acts in a manner to expel the robot from the obstacles, as illustrated in Figure 7, and an attractive force that draws the robot towards the desired goal configuration. Khatib [43] was the pioneer in introducing the APF approach for mobile robot navigation in 1986. As per his statement, the objective and hindrances function as energized surfaces, and the automaton is subjected to a hypothetical force produced by the aggregate of their potential energies. This hypothetical force, shown in Figure 7, pushes the robot in the desired direction and keeps it from heading toward a barrier. Here, the robot travels along the negative gradient to bypass the obstruction and arrive at the desired location. Garibotto et al. [44] presented an application of this method for mobile robot navigation. Kim et al. [45] discussed a novel obstacle avoidance technique in an unexplored environment using APF. To bypass the issue of a local minimum, they used a harmonic function.
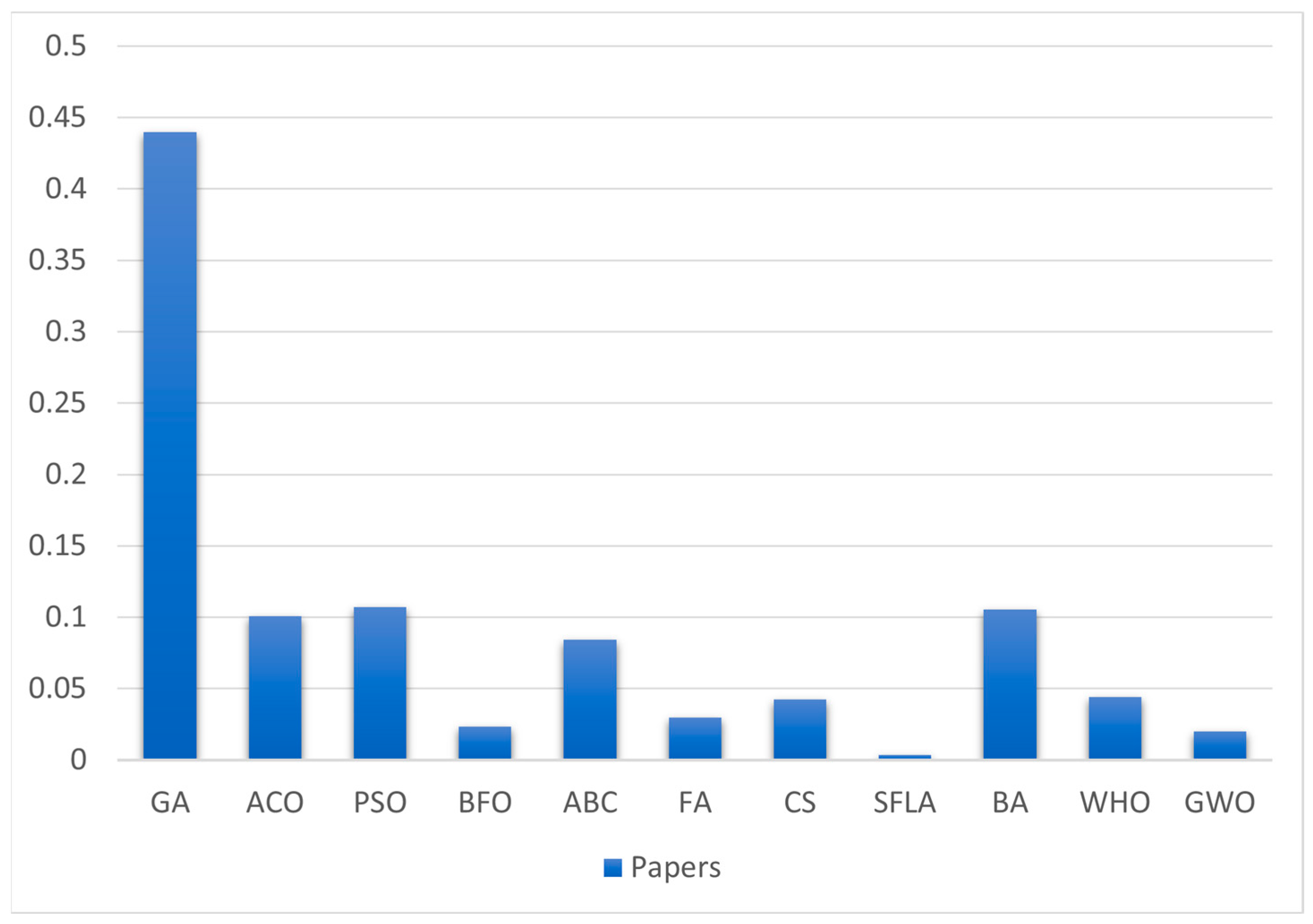
2.2. Heuristic Approaches
- 1.
- Genetic algorithm (GA): This is a well-known search-based optimization tool that adheres to the 1958 Bremermann [59] discovery of genetics and natural selection. In 1975, Holland [60] was the first to present it in the context of computer science. Robot navigation is just one of the many areas of science and technology where it is currently widely used. Robot navigation is a prevalent application in the fields of science and technology. The subject matter pertains to the optimization of complex problems that require the maximization or minimization of the objective function while adhering to the pre-established constraints. This approach involves the allocation of a population, consisting of individuals with unique genetic traits, to a specified problem. Subsequently, each member of the population is assigned a fitness score, which is determined by the objective function. The selection of individuals is based on their fitness value, and they are permitted to undergo crossover with the succeeding generation to ensure the transmission of their genetic material. The mutation prevents premature convergence and maintains population diversity.
- 2.
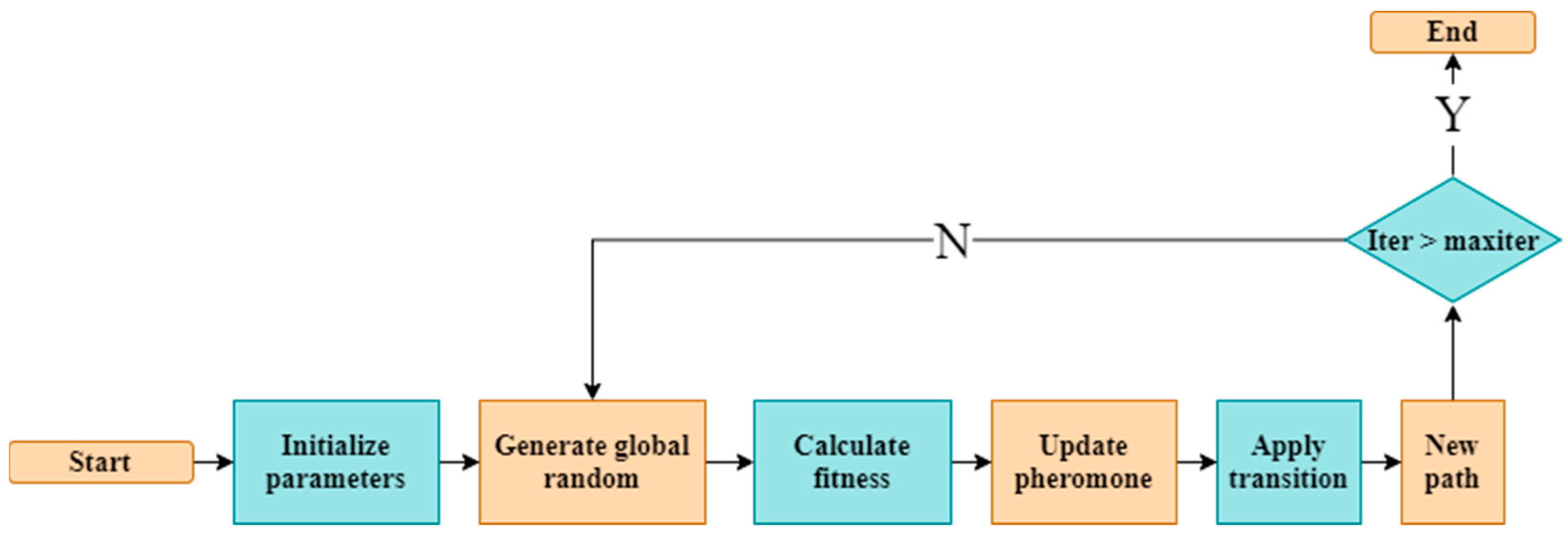
- Ant colony optimization (ACO): For his dissertation in 1992, Marco Dorigo developed this swarm intelligence algorithm [74]. In order to solve the combinatorial optimization problem, a population-based approach was used. The effectiveness with which ant colonies navigate from their nests to sources of food served as the inspiration for the ACO algorithm (Figure 9). The ACO algorithm has already been used in a number of scientific and engineering fields, including graph coloring, quadratic assignment problems, vehicle routing, traveling salesman problems, job-shop scheduling, and many others. ACO was applied to the real-time path planning of mobile robots by Guan-Zheng et al. [75]. When compared to other algorithms, such as GA, the ACO algorithm enhances dynamic convergence behavior, solution variation, convergence speed, and computational efficiency. Liu et al. [76] presented the use of ACO for multi-mobile robot navigation. They provided a collision avoidance method for different robot systems in a still setting. To enhance the selective strategy, they made use of a special function. When an ant encounters a dead corner, a penalty function is applied to the trail intensity to prevent the robot’s path from becoming immobile.
- 3.
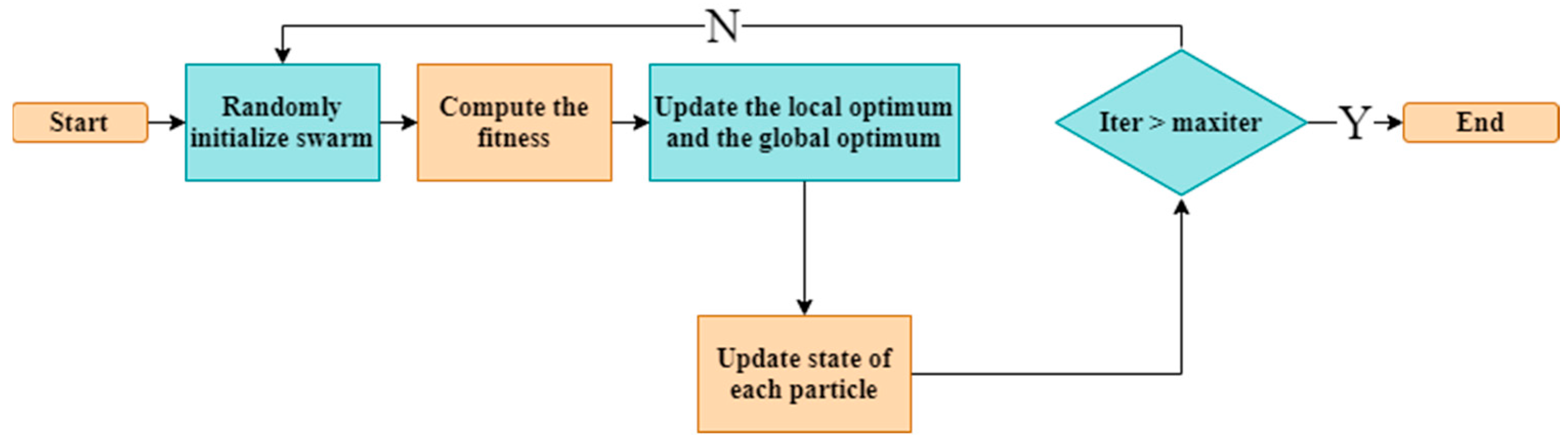
- Particle swarm optimization (PSO): This metaheuristic takes cues for group dynamics from animals in the wild, such as schools of fish and flocks of birds. It was developed in 1995 by Eberhart and Kennedy [89] and is an optimization tool with a rapidly growing user base for resolving various engineering and scientific issues. The PSO imitates social animal behavior, yet it does not require a group leader to complete the job. The flock of birds does not need a leader when searching for food; instead, they follow the member who is closest to the food (Figure 10). In this manner, the flock of birds successfully communicates with the other members of the population to arrive at the required solution. The PSO algorithm is made up of a collection of particles, each of which represents a potential resolution. PSO is now a widely used tool for mobile robot navigation. Using a multi-agent particle filter, Tang et al. [90] dealt with the issues of mapping and localization for a mobile robot navigating in an unknown environment. PSO is used because it has more stable convergence characteristics and helps to reduce calculation.
- 4.
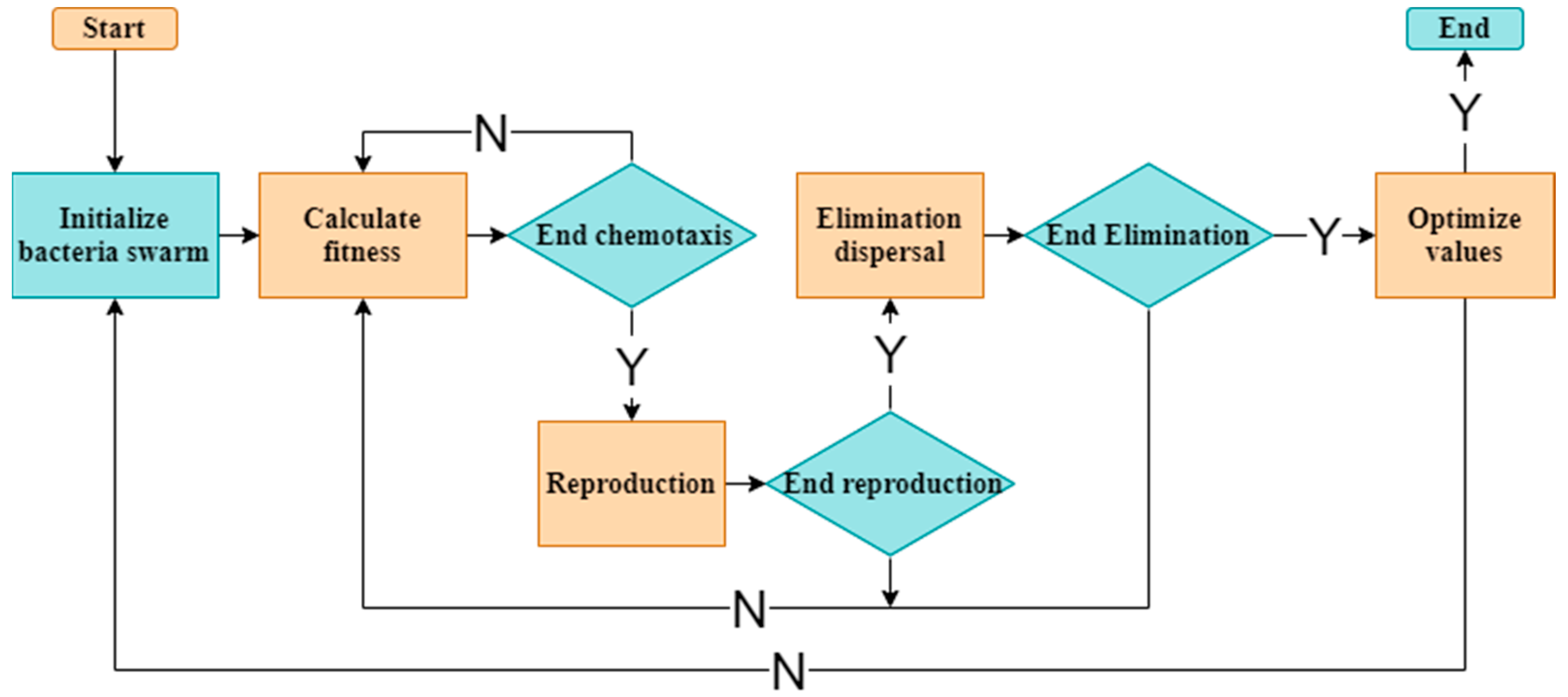
- Bacterial foraging optimization (BFO): A new nature-inspired optimization algorithm, derived from the behavior of E. coli and M. Xanthus bacteria, was introduced by Passino [106] in 2002. In order to find nutrients, these bacteria maximize their use of available energy per unit of time. Chemotaxis, a feature of the BFO algorithm, detects chemical gradients through which bacteria exchange specific signals with one another. Chemotaxis, swarming, reproduction and eradication, and dispersal are some of its four core tenets. Figure 11 depicts the general flowchart of bacteria behavior when searching for nutrients. On the map, bacteria are constantly moving in search of areas with more nutrients. Bacteria, when in an area with more nutrients, will spread out and die, whereas bacteria in an area with fewer nutrients will live longer and divide into two equal parts. Bacteria, when in an area with more food, are drawn to bacteria in the area with less food, and the bacteria in the area with less food send a signal to the bacteria in the area with more food that they are there. A region with abundant nutrients is mapped by bacteria.
- 5.
- Artificial bee colony (ABC) algorithm: The ABC algorithm has been proposed as a swarm-based intelligent approach that employs the foraging behavior of honey bees as a metaphor, as depicted in Figure 12, Kharaboga [115]. The population-based artificial bee colony (ABC) algorithm comprises a set of inherent solutions that serve as the food source for the bees. The aforementioned technique pertains to swarm algorithms and is a stochastic search approach based on populations. It is characterized by its user-friendly nature. The processing time is relatively short. The food search cycle of ABC comprises three distinct rules: dispatching the employed Apis mellifera to a food source while evaluating the caliber of the nectar; observers make decisions regarding food sources based on the information provided by worker bees and their assessment of the nectar’s quality; the process involves the selection of scout bees and their guidance toward potential sources of sustenance. The authors in reference [116] demonstrated the utilization of the ABC algorithm for the purpose of mobile robot navigation in a stationary setting. The method that was developed employs an evolutionary algorithm to ascertain the optimal path and an (ABC) for conducting a local search. For the purpose of validating the results, real-time experiments in an indoor setting are presented.
- 6.
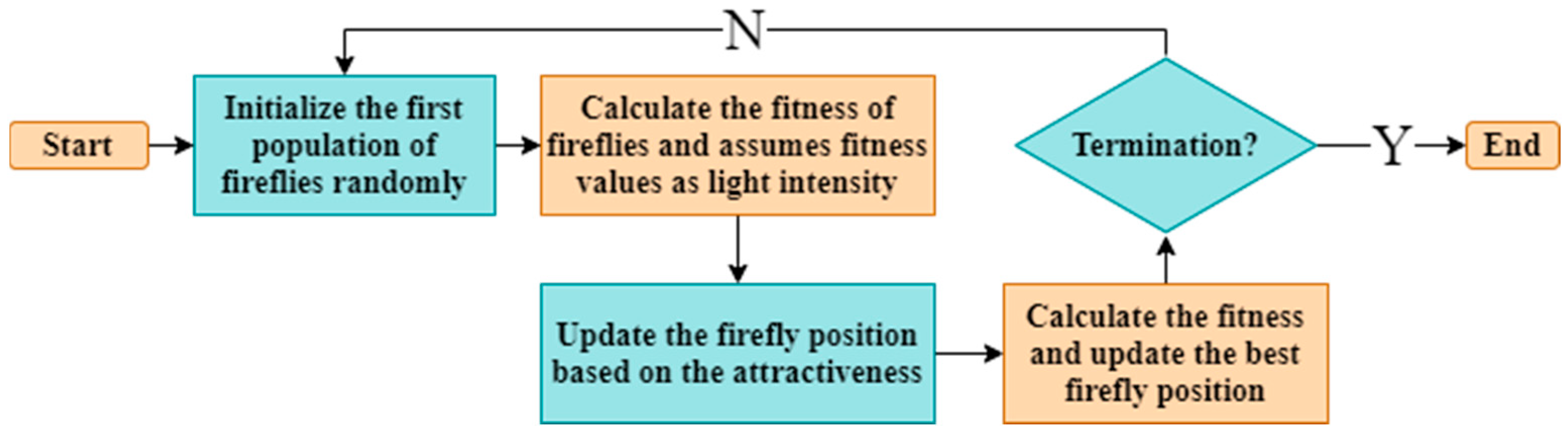
- Firefly (FF) algorithm: In 2008, Yang [128] introduced the FF, and although it is also known as the “meta-heuristics algorithm,” it is based on the flashing behavior of fireflies. Its basic idea is based on the stochastic survival of fireflies in nature and general identification as random states. The FF, a member of the Lampyridae family, is commonly known as a lightning bug due to its capacity to emit light. Light emission is produced via the prompt oxidation of luciferin in the presence of the enzyme, luciferase. Fireflies glow without wasting heat energy by using bioluminescence, a process that converts biological matter into light. Fireflies use this light to choose a mate, send messages, and occasionally frighten away predatory animals. The general flowchart for the FF algorithm is shown in Figure 13. The authors, Hidalgo-Paniagua et al. [129], have proposed a mobile robot navigational strategy utilizing the F algorithm when confronted with a stationary obstacle. The three fundamental goals of navigation, namely path length, path smoothness, and path safety, have been successfully accomplished. In a simulation-only environment, Brand et al. [130] presented the FF for a single mobile robot’s shortest collision-free path.
- 7.
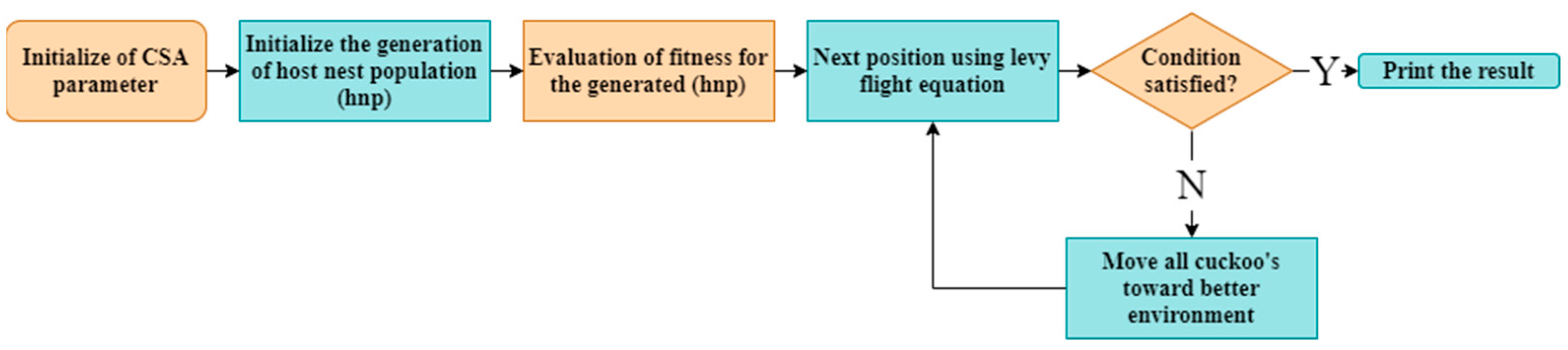
- Cuckoo search (CS): Yang and Deb [144] introduced the CS algorithm, a metaheuristic algorithm, in 2009. The algorithm was developed on the basis of the slothful behavior of some cuckoos, which causes them to lay their eggs in the nests of other host birds. Yang claims that the algorithm adheres to the following three fundamental principles for an optimization problem: one egg is laid by each cuckoo at a time in a nest that is selected at random; the best nests with top-notch eggs will be passed down to the following generation; and the number of available host nests is fixed, and the host bird has a chance of finding the cuckoo egg with a probability of pa ∈ (0, 1). In this situation, the host bird has two options: either remove the egg or abandon the nest and create a new one. Figure 14 depicts the typical flow chart for a computer science algorithm. The novelty of the CS algorithm for mobile robot path planning has resulted in a limited number of scholarly articles utilizing it.
- 8.
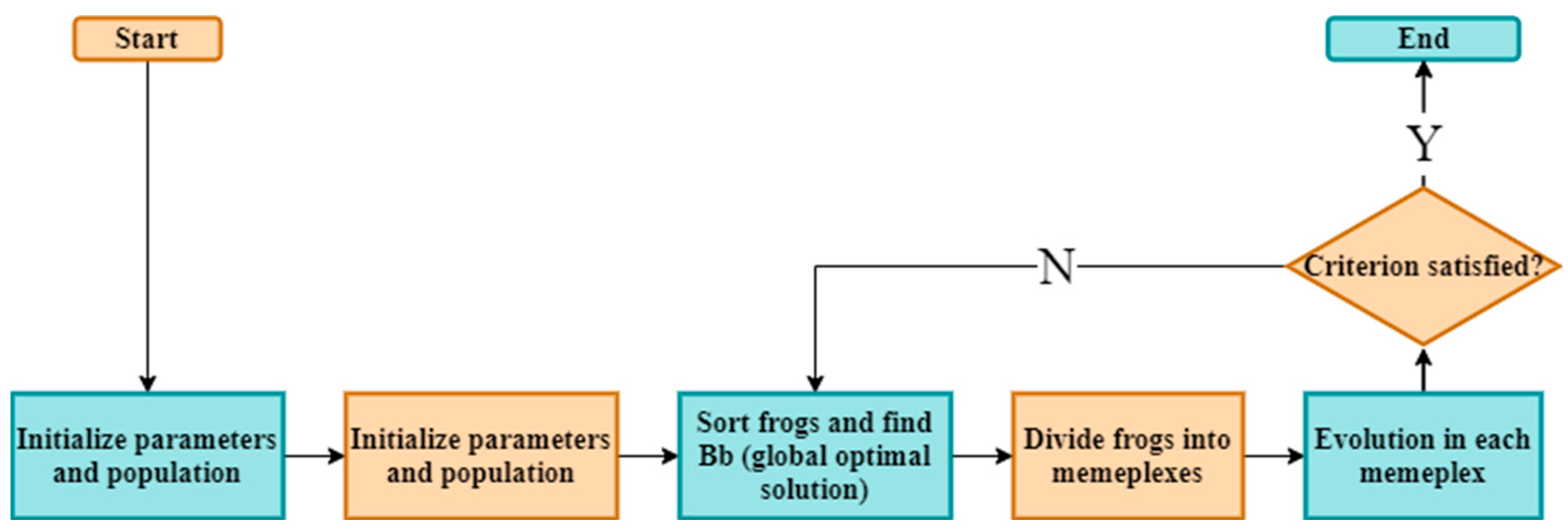
- Shuffled frog-leaping algorithm (SFLA): Based on the behavior of frogs seeking food, Eusuff and Lansey’s [149] metaheuristic optimization approach was created. In the area of engineering optimization, the SFLA has gained popularity. It stands out from other metaheuristic algorithms due to its improved convergence speed, ease of implementation, fewer parameters, higher success rate, and improved search capacity in the presence of uncertainty. The general flow chart of SFLA is shown in Figure 15. Ni et al.’s [150] median strategy forms the basis of a path-planning method that can be used to escape from a problem with a local optimal solution. The position of the frog, which was optimized by changing the fitness function to obtain the best frog in the world, was used to guide the robot’s movement around obstacles that are both fixed and moving. Path safety, path length, and path smoothness are three primary navigational goals, and they have all been proven by Hidalgo-Paniagua et al. [151] with the help of an SFLA-based multi-objective strategy. In a static condition, the modified SFLA demonstrated notably smoother paths when compared to the GA.
- 9.
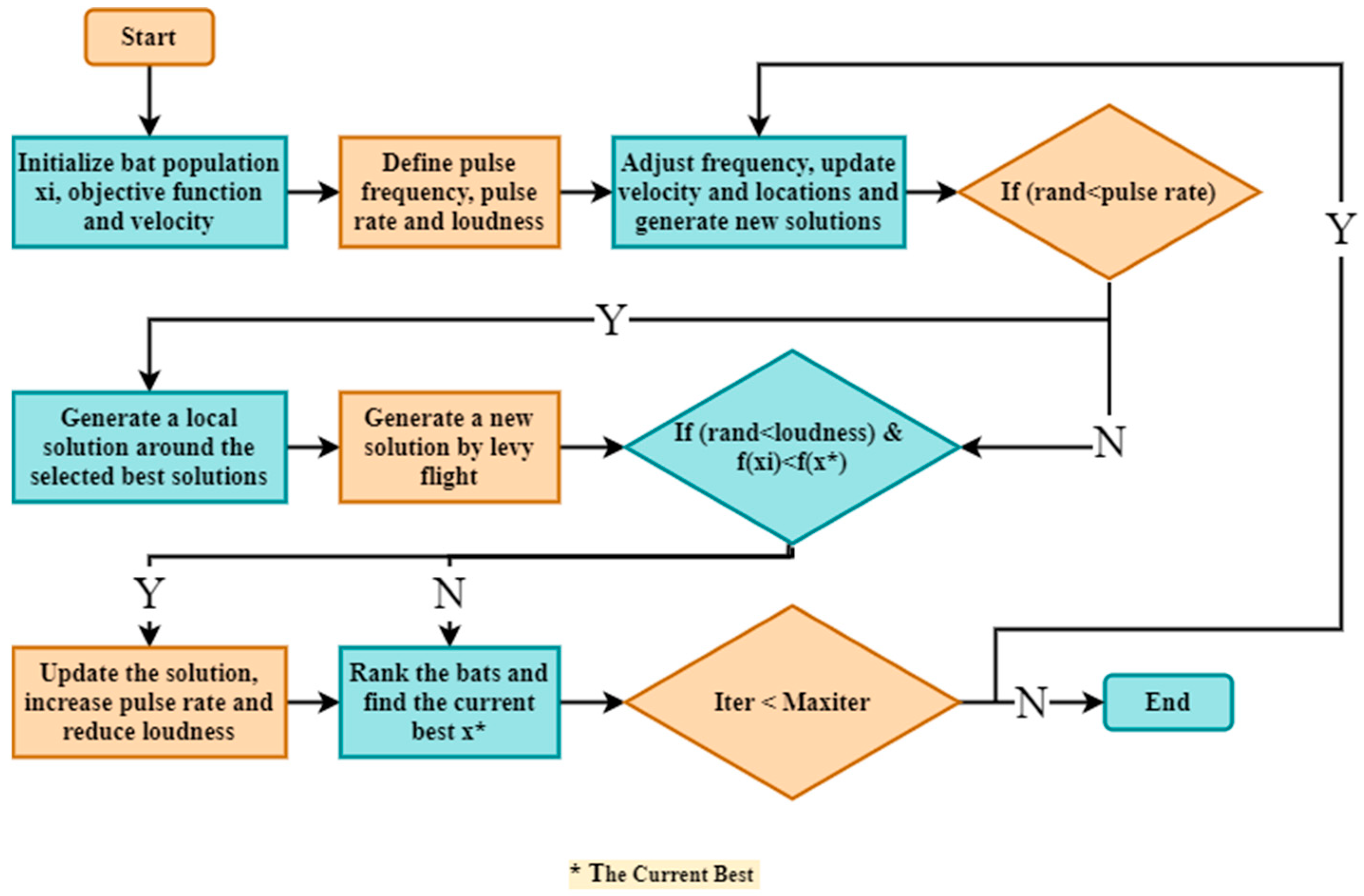
- The bat algorithm (BA): Yang created a bio-inspired algorithm in 2010 [156]. It is based on microbats’ echolocation or biosonar abilities. Bats use echolocation, which involves sending out sound pulses and flying while listening for echoes that are reflected back from any obstacles. A bat can therefore determine the velocity, shape, and size of the prey and obstacles by using the interval between its ears, the loudness of the response, and the delay time. A bat can also alter the way its sonar functions. It can fly for a shorter amount of time while gathering comprehensive information about its surroundings when it sends sound pulses at a rapid rate. The slow convergence rate, poor convergence precision, and weak stability of the bat algorithm are drawbacks. The general flow chart of the BA is shown in Figure 16. Yuan et al. [157] created a logarithmic decreasing strategy-based bat algorithm with Cauchy disturbance in this study. When comparing hybrid path-planning techniques to the dynamic window approach, the path length can be significantly reduced. Wange et al. [158] noted that unmanned combat air vehicle (UCAV) path planning is a challenging, high-dimensional optimization problem. In order to resolve the UCAV path-planning issue, a new bat algorithm with mutation (BAM) is suggested. BAM can speed up global convergence while maintaining the strong robustness of the fundamental BA.
- 10.
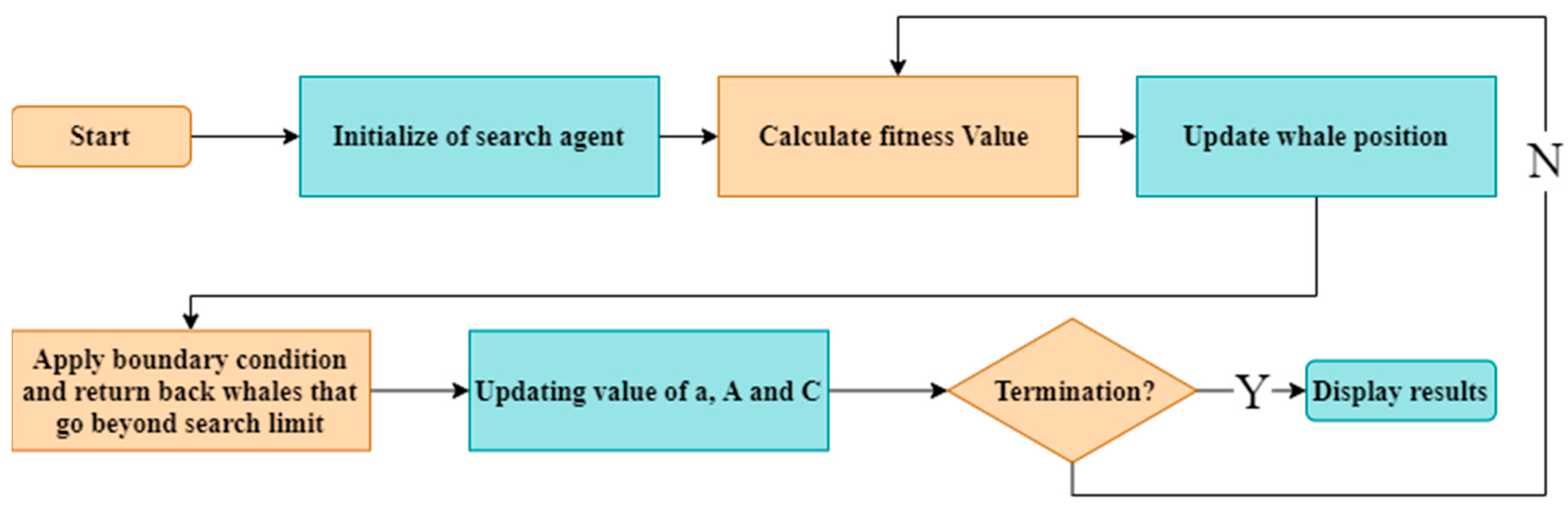
- Whale optimization algorithm (WOA): WOA is a swarm intelligence algorithm that is suggested for problems involving continuous optimization. It has been demonstrated that this algorithm performs as well as or better than some of the other algorithmic techniques currently in use [165]. WOA has drawn inspiration from the humpback whales’ hunting techniques. Each solution in WOA is regarded as a whale. In this answer, a whale attempts to fill in a new location in the search area that is referenced as the best member of the group. The whales use two different mechanisms to both attack and locate their prey. In the first, the prey is encircled, while in the second, bubble nets are made. In terms of optimization, whales search for prey by exploring their environment, and they exploit their environment during an attack. The general flow chart of WOA is shown in Figure 17. This algorithm is a new recent application on path planning in 2020, as seen in [166]. The authors, Chhillar et al., proposed that the modified WOA algorithm ensures an optimal collision-free path. The fitness of any whale will be calculated by taking into account the target location and the obstacles in the search space in the WOA algorithm.
- 11.
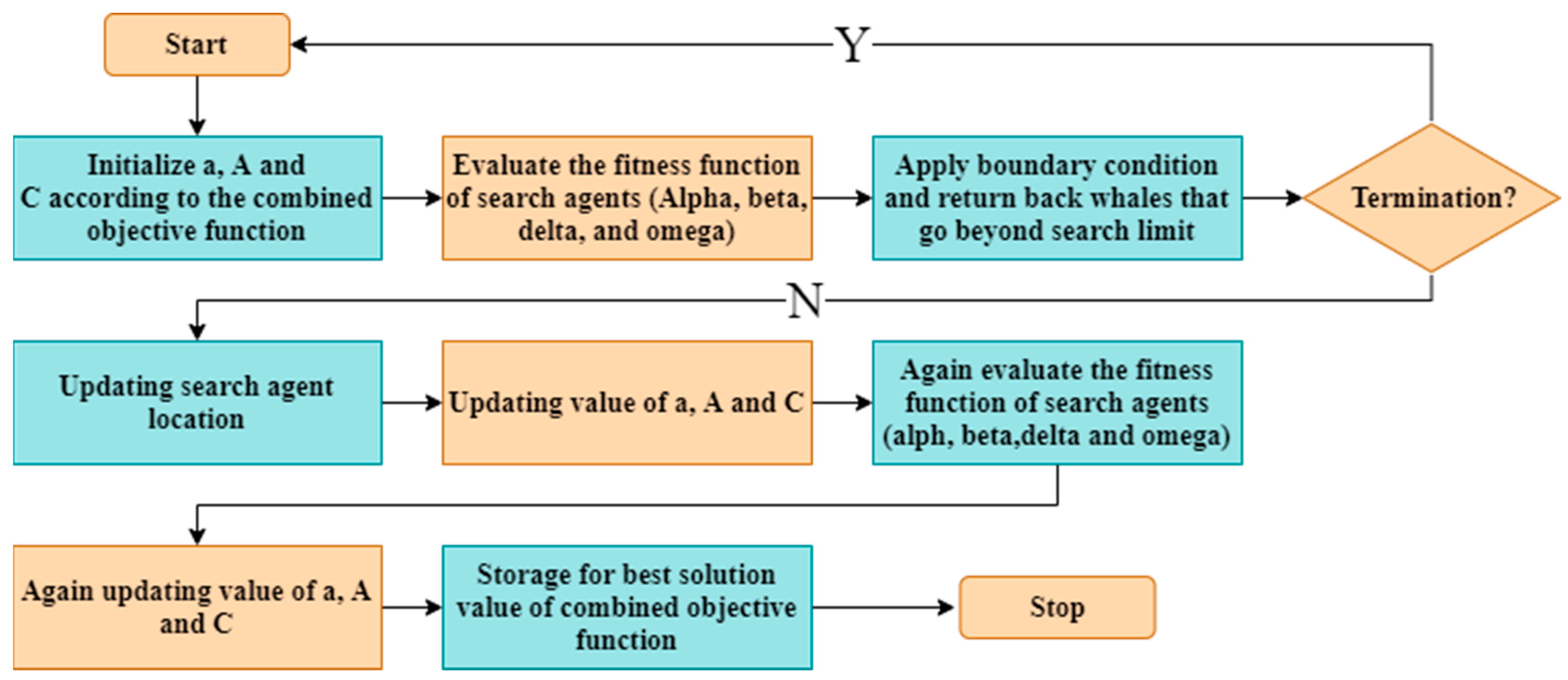
- Gray wolf optimizer (GWO): The GWO is based on gray wolves’ hunting tactics and social structure. Alpha, beta, delta, and omega wolves are the four groups that make up the gray wolf hierarchy. The alpha wolf is the dominant or leader of the pack and is usually followed by the other wolves. The best wolf for leading the pack is the alpha. Beta wolves are ranked second in the wolf group’s social hierarchy. The beta wolf assists the alpha in a variety of tasks. While it judges the omega wolves, the delta wolf must submit to the alpha and beta wolves. Scouts, guards, elders, hunters, and caregivers make up this group. The general flow chart of this algorithm is shown in Figure 18. The level-one gray wolf is known as the omega wolf [173]. The gray wolf optimizer (GWO) is a newly developed metaheuristic algorithm that emulates the hunting behavior and social structure of the gray delta, and omega, each with their own unique movement patterns [174]. Albina et al. [175] employed the GWO algorithm and coordinated multi-robot exploration (CME) to explore using multiple robots, surpassing the deterministic CME algorithm in terms of performance, with the aim of achieving optimal coordination and effectively optimizing the coverage area. Despite the fact that the mean coverage of the four distinct obstacle maps is 97.98%, complying with the obstacle avoidance constraint remains a challenging task.
3. Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ehlert, P. The Use of Artificial Intelligence in Autonomous Mobile Robots; Report on Research Project; Delft University of Technology: Delft, The Netherlands, 1999. [Google Scholar]
- Abbas, N.; Abdulsaheb, J. An Adaptive Multi-Objective Particle Swarm Optimization Algorithm for Multi-Robot Path Planning. J. Eng. 2016, 22, 164–181. [Google Scholar]
- Ahmed Abdulsaheb, J.; Jasim Kadhim, D. Robot Path Planning in Unknown Environments with Multi-Objectives Using an Improved COOT Optimization Algorithm. Int. J. Intell. Eng. Syst. 2022, 15, 548–565. [Google Scholar] [CrossRef]
- Han, K.M. Collision Free Path Planning Algorithms for Robot Navigation Problem. Ph.D. Thesis, University of Missouri—Columbia, Columbia, MO, USA, 2007. [Google Scholar] [CrossRef] [Green Version]
- Buniyamin, N.; Ngah, W.A.J.W. Robot Global Path Planning Overview and a Variation of Ant Colony System Algorithm. Int. J. Math. Comput. Simul. 2011, 5, 9–16. Available online: https://www.researchgate.net/publication/265107519 (accessed on 15 May 2023).
- Miao, H. Robot Path Planning in Dynamic Environments using a Simulated Annealing Based Approach. Ph.D. Thesis, Queensland University of Technology, Brisbane, Australia, 2009. [Google Scholar]
- ChaborAlwawi, B.K.O.; Roth, H.; Kazem, B.I.; Abdullah, M.W. Mobile Robot Motion Planning and Multi Objective Optimization Using Improved Approach. Int. J. Mech. Eng. Robot. Res. 2015, 4, 325–330. [Google Scholar] [CrossRef]
- van den Berg, J. Path Planning in Dynamic Environments. Ph.D. Thesis, Utrecht University, Utrecht, The Netherlands, 2007. [Google Scholar]
- Yang, L.; Qi, J.; Song, D.; Xiao, J.; Han, J.; Xia, Y. Survey of Robot 3D Path Planning Algorithms. J. Control Sci. Eng. 2016, 2016, 7426913. [Google Scholar] [CrossRef] [Green Version]
- Lin, S.; Liu, A.; Wang, J.; Kong, X. A Review of Path-Planning Approaches for Multiple Mobile Robots. Machines 2022, 10, 773. [Google Scholar] [CrossRef]
- Abed, B.M.; Jasim, W.M. Multi Objective Optimization Algorithms for Mobile Robot Path Planning: A Survey. Int. J. Online Biomed. Eng. (IJOE) 2022, 18, 160–177. [Google Scholar] [CrossRef]
- Spall, J.C. Introduction to Stochastic Search and Optimization; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2003. [Google Scholar] [CrossRef]
- Floudas, C.A. Deterministic Global Optimization; Springer: Boston, MA, USA, 2000; Volume 37. [Google Scholar] [CrossRef]
- Chen, H.; Zhu, Y.; Hu, K. Adaptive Bacterial Foraging Optimization. Abstr. Appl. Anal. 2011, 2011, 108269. [Google Scholar] [CrossRef] [Green Version]
- Sedighizadeh, D.; Masehian, E.; Sedighizadeh, D. Classic and Heuristic Approaches in Robot Motion Planning—A Chronological Review. World Acad. Sci. Eng. Technol. 2007, 23, 101–106. Available online: https://www.researchgate.net/publication/249714449 (accessed on 15 May 2023).
- Asano, T.; Guibas, T.; Hershberger, J.; Imai, H. Visibility-polygon search and Euclidean shortest path. In Proceedings of the 26th Annual Symposium on Foundations of Computer Science, Portland, OR, USA, 21–23 October 1985; pp. 155–164. [Google Scholar]
- Canny, J. A Voronoi method for the piano-movers problem. In Proceedings of the 1985 IEEE International Conference on Robotics and Automation, St. Louis, MO, USA, 25–28 March 1985; pp. 530–535. [Google Scholar] [CrossRef]
- Salzman, O. Sampling-based robot motion planning. Commun. ACM 2019, 62, 54–63. [Google Scholar] [CrossRef] [Green Version]
- Bhattacharya, P.; Gavrilova, M. Roadmap-Based Path Planning—Using the Voronoi Diagram for a Clearance-Based Shortest Path. IEEE Robot. Autom. Mag. 2008, 15, 58–66. [Google Scholar] [CrossRef]
- Masehian, E.; Amin-Naseri, M.R. A voronoi diagram-visibility graph-potential field compound algorithm for robot path planning. J. Robot. Syst. 2004, 21, 275–300. [Google Scholar] [CrossRef]
- Yang, D.-H.; Hong, S.-K. A roadmap construction algorithm for mobile robot path planning using skeleton maps. Adv. Robot. 2007, 21, 51–63. [Google Scholar] [CrossRef]
- Wein, R.; van den Berg, J.P.; Halperin, D. The visibility–Voronoi complex and its applications. Comput. Geom. 2007, 36, 66–87. [Google Scholar] [CrossRef] [Green Version]
- Kavraki, L.E.; Svestka, P.; Latombe, J.-C.; Overmars, M.H. Probabilistic roadmaps for path planning in high-dimensional configuration spaces. IEEE Trans. Robot. Autom. 1996, 12, 566–580. [Google Scholar] [CrossRef] [Green Version]
- Sánchez, G.; Latombe, J.-C. A Single-Query Bi-Directional Probabilistic Roadmap Planner with Lazy Collision Checking. In Robotics Research: The Tenth International Symposium; Springer: Berlin/Heidelberg, Germany, 2003; pp. 403–417. [Google Scholar] [CrossRef]
- Yan, F.; Liu, Y.-S.; Xiao, J.-Z. Path Planning in Complex 3D Environments Using a Probabilistic Roadmap Method. Int. J. Autom. Comput. 2013, 10, 525–533. [Google Scholar] [CrossRef]
- Huppi, M.; Bartolomei, L.; Mascaro, R.; Chli, M. T-PRM: Temporal Probabilistic Roadmap for Path Planning in Dynamic Environments. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; pp. 10320–10327. [Google Scholar] [CrossRef]
- Huang, X.; Soti, G.; Zhou, H.; Ledermann, C.; Hein, B.; Kroger, T. HIRO: Heuristics Informed Robot Online Path Planning Using Pre-computed Deterministic Roadmaps. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; pp. 8109–8116. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, L.; Lei, L.; Xu, F. An Improved Potential Field-Based Probabilistic Roadmap Algorithm for Path Planning. In Proceedings of the 2022 6th International Conference on Automation, Control and Robots (ICACR), Shanghai, China, 23–25 September 2022; pp. 195–199. [Google Scholar] [CrossRef]
- You, H.; Chen, G.; Jia, Q.; Huang, Z. Path Planning for Robot in Multi-dimensional Environment Based on Dynamic PRM Blended Potential Field. In Proceedings of the 2021 IEEE 5th Information Technology, Networking, Electronic and Automation Control Conference (IT-NEC), Xi’an, China, 15–17 October 2021; pp. 1157–1162. [Google Scholar] [CrossRef]
- Keil, J.M. Decomposing a Polygon into Simpler Components. SIAM J. Comput. 1985, 14, 799–817. [Google Scholar] [CrossRef]
- Samet, H. An overview of quadtrees, octrees, and related hierarchical data structures. In Theoretical Foundations of Computer Graphics and CAD; Springer: Berlin/Heidelberg, Germany, 1988. [Google Scholar]
- Noborio, H.; Naniwa, T.; Arimoto, S. A quadtree-based path-planning algorithm for a mobile robot. J. Robot. Syst. 1990, 7, 555–574. [Google Scholar] [CrossRef]
- Lingelbach, F. Path planning using probabilistic cell decomposition. In Proceedings of the IEEE International Conference on Robotics and Automation, 2004. Proceedings. ICRA ’04, New Orleans, LA, USA, 26 April–1 May 2004; Volume 1, pp. 467–472. [Google Scholar] [CrossRef] [Green Version]
- Sleumer, N.; Tschichold-Gürmann, N. Exact Cell Decomposition of Arrangements Used for Path Planning in Robotics; ETH Zurich: Zurich, Switzerland, 1999. [Google Scholar] [CrossRef]
- Cai, C.; Ferrari, S. Information-Driven Sensor Path Planning by Approximate Cell Decomposition. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 2009, 39, 672–689. [Google Scholar] [CrossRef]
- Dugarjav, B.; Lee, S.-G.; Kim, D.; Kim, J.H.; Chong, N.Y. Scan matching online cell decomposition for coverage path planning in an unknown environment. Int. J. Precis. Eng. Manuf. 2013, 14, 1551–1558. [Google Scholar] [CrossRef]
- Glavaški, D.; Volf, M.; Bonković, M. Robot motion planning using exact cell decomposition and potential field methods. In Proceedings of the 9th WSEAS International Conference on Simulation, Modelling and Optimization, Budapest, Hungary, 3–5 September 2009. [Google Scholar]
- Tunggal, T.P.; Supriyanto, A.; Rochman, N.M.Z.; Faishal, I.; Pambudi, I.; Iswanto, I. Pursuit Algorithm for Robot Trash Can Based on Fuzzy-Cell Decomposition. Int. J. Electr. Comput. Eng. (IJECE) 2016, 6, 2863. [Google Scholar] [CrossRef]
- Gill, M.A.C.; Zomaya, A.Y. A cell decomposition-based collision avoidance algorithm for robot manipulators. Cybern. Syst. 1998, 29, 113–135. [Google Scholar] [CrossRef]
- Gonzalez, R.; Kloetzer, M.; Mahulea, C. Comparative study of trajectories resulted from cell decomposition path planning approaches. In Proceedings of the 2017 21st International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 19–21 October 2017; pp. 49–54. [Google Scholar] [CrossRef]
- Iswanto, I.; Wahyunggoro, O.; Cahyadi, A. Quadrotor path planning based on modified fuzzy cell decomposition algorithm. TELKOMNIKA (Telecommun. Comput. Electron. Control) 2016, 14, 655–664. [Google Scholar] [CrossRef] [Green Version]
- Salama, O.A.A.; Eltaib, M.E.H.; Mohamed, H.A.; Salah, O. RCD: Radial Cell Decomposition Algorithm for Mobile Robot Path Planning. IEEE Access 2021, 9, 149982–149992. [Google Scholar] [CrossRef]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. In Proceedings of the 1985 IEEE International Conference on Robotics and Automation, St. Louis, MO, USA, 25–28 March 1985; pp. 500–505. [Google Scholar] [CrossRef]
- Garibotto, G.; Masciangelo, S. Path planning using the potential field approach for navigation. In Proceedings of the Fifth International Conference on Advanced Robotics’ Robots in Unstructured Environments, Pisa, Italy, 19–22 June 1991; Volume 2, pp. 1679–1682. [Google Scholar] [CrossRef]
- Kim, J.-O.; Khosla, P.K. Real-time obstacle avoidance using harmonic potential functions. IEEE Trans. Robot. Autom. 1992, 8, 338–349. [Google Scholar] [CrossRef] [Green Version]
- Borenstein, J.; Koren, Y. Real-time obstacle avoidance for fast mobile robots. IEEE Trans. Syst. Man Cybern. 1989, 19, 1179–1187. [Google Scholar] [CrossRef] [Green Version]
- Ge, S.S.; Cui, Y.J. Dynamic Motion Planning for Mobile Robots Using Potential Field Method. Auton. Robot. 2002, 13, 207–222. [Google Scholar] [CrossRef]
- Montiel, O.; Orozco-Rosas, U.; Sepúlveda, R. Path planning for mobile robots using Bacterial Potential Field for avoiding static and dynamic obstacles. Expert Syst. Appl. 2015, 42, 5177–5191. [Google Scholar] [CrossRef]
- Valavanis, K.P.; Hebert, T.; Kolluru, R.; Tsourveloudis, N. Mobile robot navigation in 2-D dynamic environments using an electrostatic potential field. IEEE Trans. Syst. Man Cybern.—Part A Syst. Hum. 2000, 30, 187–196. [Google Scholar] [CrossRef] [Green Version]
- Huang, L. Velocity planning for a mobile robot to track a moving target—A potential field approach. Robot. Auton. Syst. 2009, 57, 55–63. [Google Scholar] [CrossRef]
- Shi, P.; Zhao, Y. An efficient path planning algorithm for mobile robot using improved potential field. In Proceedings of the 2009 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guilin, China, 19–23 December 2009; pp. 1704–1708. [Google Scholar] [CrossRef]
- Sfeir, J.; Saad, M.; Saliah-Hassane, H. An improved Artificial Potential Field approach to real-time mobile robot path planning in an unknown environment. In Proceedings of the 2011 IEEE International Symposium on Robotic and Sensors Environments (ROSE), Montreal, QC, Canada, 17–18 September 2011; pp. 208–213. [Google Scholar] [CrossRef]
- Pradhan, S.K.; Parhi, D.R.; Panda, A.K.; Behera, R.K. Potential field method to navigate several mobile robots. Appl. Intell. 2006, 25, 321–333. [Google Scholar] [CrossRef]
- Zhang, H.; Li, M.; Wu, Z. Path Planning based on Improved Artificial Potential Field Method. In Proceedings of the 2021 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, 22–24 May 2021; pp. 4922–4925. [Google Scholar] [CrossRef]
- Li, Y.; Tian, B.; Yang, Y.; Li, C. Path planning of robot based on artificial potential field method. In Proceedings of the 2022 IEEE 6th Information Technology and Mechatronics Engineering Conference (ITOEC), Chongqing, China, 4–6 March 2022; pp. 91–94. [Google Scholar] [CrossRef]
- Shi, M.; Nie, J. Improvement of Path Planning Algorithm based on Small Step Artificial Potential Field Method. In Proceedings of the 2022 9th International Conference on Dependable Systems and Their Applications (DSA), Wulumuqi, China, 4–5 August 2022; pp. 827–831. [Google Scholar] [CrossRef]
- Liu, C.; Zhai, L.; Zhang, X. Research on local real-time obstacle avoidance path planning of unmanned vehicle based on improved artificial potential field method. In Proceedings of the 2022 6th CAA International Conference on Vehicular Control and Intelligence (CVCI), Nanjing, China, 28–30 October 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Janabi-Sharifi, F.; Vinke, D. Integration of the artificial potential field approach with simulated annealing for robot path planning. In Proceedings of the 8th IEEE International Symposium on Intelligent Control, Chicago, IL, USA, 25–27 August 1993; pp. 536–541. [Google Scholar] [CrossRef]
- Bremermann, H.J. The Evolution of Intelligence. The Nervous System as a Model of Its Environment; University of Washington: Seattle, WA, USA, 1958. [Google Scholar]
- Holland, J.H. Adaptation in Natural and Artificial Systems; University of Michigan Press: Ann Arbor, MI, USA, 1975. [Google Scholar]
- Kala, R. Coordination in Navigation of Multiple Mobile Robots. Cybern. Syst. 2014, 45, 1–24. [Google Scholar] [CrossRef]
- Liu, F.; Liang, S.; Xian, X. Optimal Robot Path Planning for Multiple Goals Visiting Based on Tailored Genetic Algorithm. Int. J. Comput. Intell. Syst. 2014, 7, 1109. [Google Scholar] [CrossRef] [Green Version]
- Yang, S.; Hu, Y.; Meng, M. A Knowledge Based GA for Path Planning of Multiple Mobile Robots in Dynamic Environments. In Proceedings of the 2006 IEEE Conference on Robotics, Automation and Mechatronics, Bangkok, Thailand, 1–3 June 2006; pp. 1–6. [Google Scholar] [CrossRef]
- Qu, H.; Xing, K.; Alexander, T. An improved genetic algorithm with co-evolutionary strategy for global path planning of multiple mobile robots. Neurocomputing 2013, 120, 509–517. [Google Scholar] [CrossRef]
- Ni, J.; Wang, K.; Huang, H.; Wu, L.; Luo, C. Robot path planning based on an improved genetic algorithm with variable length chromosome. In Proceedings of the 2016 12th International Conference on Natural Computation, Fuzzy Systems and Knowledge Discovery (ICNC-FSKD), Changsha, China, 13–15 August 2016; pp. 145–149. [Google Scholar] [CrossRef]
- Kumar, A.; Kumar, P.B.; Parhi, D.R. Intelligent Navigation of Humanoids in Cluttered Environments Using Regression Analysis and Genetic Algorithm. Arab. J. Sci. Eng. 2018, 43, 7655–7678. [Google Scholar] [CrossRef]
- Chen, J.; Zhu, H.; Zhang, L.; Sun, Y. Research on fuzzy control of path tracking for underwater vehicle based on genetic algorithm optimization. Ocean Eng. 2018, 156, 217–223. [Google Scholar] [CrossRef]
- Roberge, V.; Tarbouchi, M.; Labonte, G. Fast Genetic Algorithm Path Planner for Fixed-Wing Military UAV Using GPU. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 2105–2117. [Google Scholar] [CrossRef]
- Patle, B.K.; Parhi, D.R.K.; Jagadeesh, A.; Kashyap, S.K. Matrix-Binary Codes based Genetic Algorithm for path planning of mobile robot. Comput. Electr. Eng. 2018, 67, 708–728. [Google Scholar] [CrossRef]
- Creaser, P.A. Evolutionary generation of fuzzy guidance laws. In Proceedings of the UKACC International Conference on Control (CONTROL ’98), Swansea, UK, 1–4 September 1998; pp. 883–888. [Google Scholar] [CrossRef]
- Lin, K.-P.; Hung, K.-C. An efficient fuzzy weighted average algorithm for the military UAV selecting under group decision-making. Knowl. Based Syst. 2011, 24, 877–889. [Google Scholar] [CrossRef]
- Zhang, Y. Research on Robot Path Planning Based on Improved Genetic Algorithm. In Proceedings of the 2022 14th International Conference on Advanced Computational Intelligence (ICACI), Wuhan, China, 15–17 July 2022; pp. 273–277. [Google Scholar] [CrossRef]
- Huang, F.; Fu, H.; Chen, J.; Wang, X. Mobile robot path planning based on improved genetic algorithm. In Proceedings of the 2021 4th World Conference on Mechanical Engineering and Intelligent Manufacturing (WCMEIM), Shanghai, China, 12–14 November 2021; pp. 378–383. [Google Scholar] [CrossRef]
- Dorigo, M.; Gambardella, L.M. Ant colony system: A cooperative learning approach to the traveling salesman problem. IEEE Trans. Evol. Comput. 1997, 1, 53–66. [Google Scholar] [CrossRef] [Green Version]
- Tan, G.-Z. Ant Colony System Algorithm for Real-Time Globally Optimal Path Planning of Mobile Robots. Acta Autom. Sin. 2007, 33, 0279. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Mao, L.; Yu, J. Path Planning Based on Ant Colony Algorithm and Distributed Local Navigation for Multi-Robot Systems. In Proceedings of the 2006 International Conference on Mechatronics and Automation, Luoyang, China, 25–28 June 2006; pp. 1733–1738. [Google Scholar] [CrossRef]
- Castillo, O.; Neyoy, H.; Soria, J.; Melin, P.; Valdez, F. A new approach for dynamic fuzzy logic parameter tuning in Ant Colony Optimization and its application in fuzzy control of a mobile robot. Appl. Soft Comput. 2015, 28, 150–159. [Google Scholar] [CrossRef]
- Kumar, P.B.; Sahu, C.; Parhi, D.R. A hybridized regression-adaptive ant colony optimization approach for navigation of humanoids in a cluttered environment. Appl. Soft Comput. 2018, 68, 565–585. [Google Scholar] [CrossRef]
- Liu, J.; Yang, J.; Liu, H.; Tian, X.; Gao, M. An improved ant colony algorithm for robot path planning. Soft Comput. 2017, 21, 5829–5839. [Google Scholar] [CrossRef]
- Rajput, U.; Kumari, M. Mobile robot path planning with modified ant colony optimization. Int. J. Bio-Inspired Comput. 2017, 9, 106. [Google Scholar] [CrossRef]
- Purian, F.K.; Sadeghian, E. Mobile robots path planning using ant colony optimization and Fuzzy Logic algorithms in unknown dynamic environments. In Proceedings of the 2013 International Conference on Control, Automation, Robotics and Embedded Systems (CARE), Jabalpur, India, 16–18 December 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Brand, M.; Masuda, M.; Wehner, N.; Yu, X.-H. Ant Colony Optimization algorithm for robot path planning. In Proceedings of the 2010 International Conference on Computer Design and Applications, Qinhuangdao, China, 25–27 June 2010; pp. V3-436–V3-440. [Google Scholar] [CrossRef] [Green Version]
- Liu, L.Q.; Yu, F.; Dai, Y.T. Path planning of underwater vehicle in 3D space based on ant colony algorithm. J. Syst. Simul. 2008, 20, 3712e6. [Google Scholar]
- Chen, Y.; Su, F.; Shen, L.C. Improved ant colony algorithm based on PRM for UAV route planning. J. Syst. Simul. 2009, 21, 1658e66. [Google Scholar]
- Gao, M.; Liu, Y.; Zhang, Q. Application of improved ant colony algorithm to route planning of anti-ship missile. J. Comput. Appl. 2013, 32, 2530–2533. [Google Scholar] [CrossRef]
- Zong, C.; Yao, X.; Fu, X. Path Planning of Mobile Robot based on Improved Ant Colony Algorithm. In Proceedings of the 2022 IEEE 10th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 17–19 June 2022; pp. 1106–1110. [Google Scholar] [CrossRef]
- Su, Q.; Yu, W.; Liu, J. Mobile Robot Path Planning Based on Improved Ant Colony Algorithm. In Proceedings of the 2021 Asia-Pacific Conference on Communications Technology and Computer Science (ACCTCS), Shenyang, China, 22–24 January 2021; pp. 220–224. [Google Scholar] [CrossRef]
- Chen, L.; Su, Y.; Zhang, D.; Leng, Z.; Qi, Y.; Jiang, K. Research on path planning for mobile robots based on improved ACO. In Proceedings of the 2021 36th Youth Academic Annual Conference of Chinese Association of Automation (YAC), Nanchang, China, 28–30 May 2021; pp. 379–383. [Google Scholar] [CrossRef]
- Eberhart, R.; Kennedy, J. A new optimizer using particle swarm theory. In Proceedings of the MHS’95—Sixth International Symposium on Micro Machine and Human Science, Nagoya, Japan, 4–6 October 1995; pp. 39–43. [Google Scholar] [CrossRef]
- Tang, X.; Li, L.; Jiang, B. Mobile robot SLAM method based on multi-agent particle swarm optimized particle filter. J. China Univ. Posts Telecommun. 2014, 21, 78–86. [Google Scholar] [CrossRef]
- Ha, X.V.; Ha, C.; Lee, J. Novel hybrid optimization algorithm using PSO and MADS for the trajectory estimation of a four track wheel skid-steered mobile robot. Adv. Robot. 2013, 27, 1421–1437. [Google Scholar] [CrossRef]
- Atyabi, A.; Phon-Amnuaisuk, S.; Ho, C.K. Applying Area Extension PSO in Robotic Swarm. J. Intell. Robot. Syst. 2010, 58, 253–285. [Google Scholar] [CrossRef]
- Tang, Q.; Eberhard, P. Cooperative Motion of Swarm Mobile Robots Based on Particle Swarm Optimization and Multibody System Dynamics. Mech. Based Des. Struct. Mach. 2011, 39, 179–193. [Google Scholar] [CrossRef]
- Couceiro, M.S.; Rocha, R.P.; Ferreira, N.M.F. A PSO multi-robot exploration approach over unreliable MANETs. Adv. Robot. 2013, 27, 1221–1234. [Google Scholar] [CrossRef]
- Chen, Y.-L.; Cheng, J.; Lin, C.; Wu, X.; Ou, Y.; Xu, Y. Classification-based learning by particle swarm optimization for wall-following robot navigation. Neurocomputing 2013, 113, 27–35. [Google Scholar] [CrossRef]
- Das, P.K.; Behera, H.S.; Panigrahi, B.K. A hybridization of an improved particle swarm optimization and gravitational search algorithm for multi-robot path planning. Swarm Evol. Comput. 2016, 28, 14–28. [Google Scholar] [CrossRef]
- He, B.; Ying, L.; Zhang, S.; Feng, X.; Yan, T.; Nian, R.; Shen, Y. Autonomous navigation based on unscented-FastSLAM using particle swarm optimization for autonomous underwater vehicles. Measurement 2015, 71, 89–101. [Google Scholar] [CrossRef]
- Rendón, M.A.; Martins, F.F. Path Following Control Tuning for an Autonomous Unmanned Quadrotor Using Particle Swarm Optimization. IFAC-PapersOnLine 2017, 50, 325–330. [Google Scholar] [CrossRef]
- Kumar, P.B.; Pandey, K.K.; Sahu, C.; Chhotray, A.; Parhi, D.R. A hybridized RA-APSO approach for humanoid navigation. In Proceedings of the 2017 Nirma University International Conference on Engineering (NUiCONE), Ahmedabad, India, 23–25 November 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Gao, Y.; Xie, W.; Li, Q.; Li, X.; Hu, M.; Zhao, L. Time-Jerk Optimal Trajectory Planning of Industrial Robot based on Hybrid Particle Swarm Optimization Algorithm. In Proceedings of the 2021 China Automation Congress (CAC), Beijing, China, 22–24 October 2021; pp. 6327–6331. [Google Scholar] [CrossRef]
- Algabri, M.; Mathkour, H.; Ramdane, H.; Alsulaiman, M. Comparative study of soft computing techniques for mobile robot navigation in an unknown environment. Comput. Hum. Behav. 2015, 50, 42–56. [Google Scholar] [CrossRef]
- Banks, A.; Vincent, J.; Phalp, K. Particle Swarm Guidance System for Autonomous Unmanned Aerial Vehicles in an Air Defence Role. J. Navig. 2008, 61, 9–29. [Google Scholar] [CrossRef]
- Yuan, D. Research on path-planning of particle swarm optimization based on distance penalty. In Proceedings of the 2021 2nd International Conference on Computing and Data Science (CDS), Stanford, CA, USA, 28–29 January 2021; pp. 149–153. [Google Scholar] [CrossRef]
- Chen, L.; Zhang, Y.; Xue, Y.; Chen, Y. Robot Path Planning Based on Improved Particle Swarm Optimization. In Proceedings of the 2022 Power System and Green Energy Conference (PSGEC), Shanghai, China, 25–27 August 2022; pp. 507–511. [Google Scholar] [CrossRef]
- Sarkar, K.; Balabantaray, B.K.; Chakrabarty, A.; Biswal, B.B.; Mohanty, B. Path Planning of Mobile Robots Using Enhanced Particle Swarm Optimization. In Proceedings of the 2020 3rd International Conference on Energy, Power and Environment: Towards Clean Energy Technologies, Shillong, Meghalaya, India, 5–7 March 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Passino, K. Biomimicry of bacterial foraging for distributed optimization and control. IEEE Control Syst. 2002, 22, 52–67. [Google Scholar] [CrossRef]
- Dos, L.; Coelho, S.; Sierakowski, C.A. Bacteria colony approaches with variable velocity applied to path optimization of mobile robots. In ABCM Symposium Series in Mechatronics; ABCM: Hampton, IA, USA, 2006; Volume 2, pp. 297–304. [Google Scholar]
- Sierakowski, C.A.; Coelho, L.D.S. Path Planning Optimization for Mobile Robots Based on Bacteria Colony Approach. In Applied Soft Computing Technologies: The Challenge of Complexity; Springer: Berlin/Heidelberg, Germany, 2006; pp. 187–198. [Google Scholar] [CrossRef]
- Liang, X.; Li, L.; Wu, J.; Chen, H. Mobile robot path planning based on adaptive bacterial foraging algorithm. J. Cent. South Univ. 2013, 20, 3391–3400. [Google Scholar] [CrossRef]
- Gasparri, A.; Prosperi, M. A bacterial colony growth algorithm for mobile robot localization. Auton. Robot. 2008, 24, 349–364. [Google Scholar] [CrossRef]
- Abbas, N.H.; Ali, F.M. Path Planning of an Autonomous Mobile Robot using Enhanced Bacterial Foraging Optimization Algorithm. Al-Khwarizmi Eng. J. 2017, 12, 26–35. [Google Scholar] [CrossRef] [Green Version]
- Jati, A.; Singh, G.; Rakshit, P.; Konar, A.; Kim, E.; Nagar, A.K. A hybridisation of Improved Harmony Search and Bacterial Foraging for multi-robot motion planning. In Proceedings of the 2012 IEEE Congress on Evolutionary Computation, Brisbane, QLD, Australia, 10–15 June 2012; pp. 1–8. [Google Scholar] [CrossRef]
- dos Santos Coelho, L.; da Costa Silveira, C. Improved bacterial foraging strategy for controller optimization applied to robotic manipulator system. In Proceedings of the 2006 IEEE Conference on Computer Aided Control System Design, 2006 IEEE International Conference on Control Applications, 2006 IEEE International Symposium on Intelligent Control, Munich, Germany, 4–6 October 2006; pp. 1276–1281. [Google Scholar] [CrossRef]
- Oyekan, J.; Hu, H. A novel bacterial foraging algorithm for automated tuning of PID controllers of UAVs. In Proceedings of the 2010 IEEE International Conference on Information and Automation, Harbin, China, 20–23 June 2010; pp. 693–698. [Google Scholar] [CrossRef]
- Karaboga, D. An Idea Based on Honey Bee Swarm for Numerical Optimization; Erciyes University: Kayseri, Turkey, 2005. [Google Scholar]
- Contreras-Cruz, M.A.; Ayala-Ramirez, V.; Hernandez-Belmonte, U.H. Mobile robot path planning using artificial bee colony and evolutionary programming. Appl. Soft Comput. 2015, 30, 319–328. [Google Scholar] [CrossRef]
- Saffari, M.H.; Mahjoob, M.J. Bee colony algorithm for real-time optimal path planning of mobile robots. In Proceedings of the 2009 Fifth International Conference on Soft Computing, Computing with Words and Perceptions in System Analysis, Decision and Control, Famagusta, North Cyprus, 2–4 September 2009; pp. 1–4. [Google Scholar] [CrossRef]
- Ma, Q.; Lei, X. Dynamic Path Planning of Mobile Robots Based on ABC Algorithm. In Artificial Intelligence and Computational Intelligence, Proceedings of the International Conference, AICI 2010, Sanya, China, 23–24 October 2010; Springer: Berlin/Heidelberg, Germany, 2010; pp. 267–274. [Google Scholar] [CrossRef]
- Bhattacharjee, P.; Rakshit, P.; Goswami, I.; Konar, A.; Nagar, A.K. Multi-robot path-planning using artificial bee colony optimization algorithm. In Proceedings of the 2011 Third World Congress on Nature and Biologically Inspired Computing, Salamanca, Spain, 19–21 October 2011; pp. 219–224. [Google Scholar] [CrossRef]
- Liang, J.-H.; Lee, C.-H. Efficient collision-free path-planning of multiple mobile robots system using efficient artificial bee colony algorithm. Adv. Eng. Softw. 2015, 79, 47–56. [Google Scholar] [CrossRef]
- Xu, C.; Duan, H.; Liu, F. Chaotic artificial bee colony approach to Uninhabited Combat Air Vehicle (UCAV) path planning. Aerosp. Sci. Technol. 2010, 14, 535–541. [Google Scholar] [CrossRef]
- Li, B.; Chiong, R.; Gong, L. Search-evasion path planning for submarines using the Artificial Bee Colony algorithm. In Proceedings of the 2014 IEEE Congress on Evolutionary Computation (CEC), Beijing, China, 6–11 July 2014; pp. 528–535. [Google Scholar] [CrossRef]
- Bhagade, A.S.; Puranik, P.V. Artificial Bee Colony Algorithm (ABC) for Vehicle Routing Optimization Problem. Int. J. Soft Comput. Eng. 2012, 2, 329–333. [Google Scholar]
- Li, B.; Gong, L.; Yang, W. An Improved Artificial Bee Colony Algorithm Based on Balance-Evolution Strategy for Unmanned Combat Aerial Vehicle Path Planning. Sci. World J. 2014, 2014, 232704. [Google Scholar] [CrossRef] [Green Version]
- Ding, L.; Wu, H.; Yao, Y. Chaotic Artificial Bee Colony Algorithm for System Identification of a Small-Scale Unmanned Helicopter. Int. J. Aerosp. Eng. 2015, 2015, 801874. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Song, X.; Guan, W. Mobile robot path planning based on ABC-PSO algorithm. In Proceedings of the 2022 IEEE 6th Information Technology and Mechatronics Engineering Conference (ITOEC), Chongqing, China, 4–6 March 2022; pp. 530–534. [Google Scholar] [CrossRef]
- Szczepanski, R.; Tarczewski, T. Global path planning for mobile robot based on Artificial Bee Colony and Dijkstra’s algorithms. In Proceedings of the 2021 IEEE 19th International Power Electronics and Motion Control Conference (PEMC), Gliwice, Poland, 25–29 April 2021; pp. 724–730. [Google Scholar] [CrossRef]
- Yang, X.-S. Nature-Inspired Metaheuristic Algorithms, 2nd ed.; Luniver Press: Bristol, UK, 2010. [Google Scholar]
- Hidalgo-Paniagua, A.; Vega-Rodríguez, M.A.; Ferruz, J.; Pavón, N. Solving the multi-objective path planning problem in mobile robotics with a FF-based approach. Soft Comput. 2017, 21, 949–964. [Google Scholar] [CrossRef]
- Brand, M.; Yu, X.-H. Autonomous robot path optimization using firefly algorithm. In Proceedings of the 2013 International Conference on Machine Learning and Cybernetics, Tianjin, China, 14–17 July 2013; pp. 1028–1032. [Google Scholar] [CrossRef]
- Sutantyo, D.; Levi, P. Decentralized underwater multi-robot communication using bio-inspired approaches. Artif. Life Robot. 2015, 20, 152–158. [Google Scholar] [CrossRef]
- Sutantyo, D.; Levi, P.; Moslinger, C.; Read, M. Collective-adaptive Levy flight for underwater multi-robot exploration. In Proceedings of the 2013 IEEE International Conference on Mechatronics and Automation, Takamatsu, Japan, 4–7 August 2013; pp. 456–462. [Google Scholar] [CrossRef]
- Christensen, A.L.; O’Grady, R.; Dorigo, M. Synchronization and fault detection in autonomous robots. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 4139–4140. [Google Scholar] [CrossRef] [Green Version]
- Wang, G.; Guo, L.; Hong, D.; Duan, H.; Liu, L.; Wang, H. A modified firefly algorithm for UCAV path planning. Int. J. Hosp. Inf. Technol. 2012, 5, 123e44. [Google Scholar]
- Patle, B.K.; Parhi, D.R.; Jagadeesh, A.; Kashyap, S.K. On firefly algorithm: Optimization and application in mobile robot navigation. World J. Eng. 2017, 14, 65–76. [Google Scholar] [CrossRef]
- Kim, H.-C.; Kim, J.-S.; Ji, Y.-K.; Park, J.-H. Path Planning of Swarm Mobile Robots Using Firefly Algorithm. J. Inst. Control Robot. Syst. 2013, 19, 435–441. [Google Scholar] [CrossRef] [Green Version]
- Mitić, M.; Miljković, Z. Bio-inspired approach to learning robot motion trajectories and visual control commands. Expert Syst. Appl. 2015, 42, 2624–2637. [Google Scholar] [CrossRef]
- Sadhu, A.K.; Konar, A.; Bhattacharjee, T.; Das, S. Synergism of Firefly Algorithm and Q-Learning for Robot Arm Path Planning. Swarm Evol. Comput. 2018, 43, 50–68. [Google Scholar] [CrossRef]
- Abbas, N.H.; Saleh, B.J. Design of a Kinematic Neural Controller for Mobile Robots based on Enhanced Hybrid Firefly-Artificial Bee Colony Algorithm. AL-Khwarizmi Eng. J. 2016, 12, 45–60. [Google Scholar]
- Tighzert, L.; Fonlupt, C.; Mendil, B. A set of new compact firefly algorithms. Swarm Evol. Comput. 2018, 40, 92–115. [Google Scholar] [CrossRef]
- Liu, C.; Zhao, Y.; Gao, F.; Liu, L. Three-Dimensional Path Planning Method for Autonomous Underwater Vehicle Based on Modified Firefly Algorithm. Math. Probl. Eng. 2015, 2015, 561394. [Google Scholar] [CrossRef] [Green Version]
- Patle, B.K.; Pandey, A.; Jagadeesh, A.; Parhi, D.R. Path planning in uncertain environment by using firefly algorithm. Def. Technol. 2018, 14, 691–701. [Google Scholar] [CrossRef]
- Li, F.; Fan, X.; Hou, Z. A Firefly Algorithm With Self-Adaptive Population Size for Global Path Planning of Mobile Robot. IEEE Access 2020, 8, 168951–168964. [Google Scholar] [CrossRef]
- Yang, X.; Wu, D. Atomic simulations for surface-initiated melting of Nb(111). Trans. Nonferrous Met. Soc. China 2009, 19, 210–214. [Google Scholar] [CrossRef]
- Mohanty, P.K.; Parhi, D.R. Optimal path planning for a mobile robot using cuckoo search algorithm. J. Exp. Theor. Artif. Intell. 2016, 28, 35–52. [Google Scholar] [CrossRef]
- Mohanty, P.K.; Parhi, D.R. A new hybrid optimization algorithm for multiple mobile robots navigation based on the CS-ANFIS approach. Memetic Comput. 2015, 7, 255–273. [Google Scholar] [CrossRef]
- Wang, G.; Guo, L.; Duan, H.; Wang, H.; Liu, L.; Shao, M. A Hybrid Metaheuristic DE/CS Algorithm for UCAV Three-Dimension Path Planning. Sci. World J. 2012, 2012, 583973. [Google Scholar] [CrossRef] [Green Version]
- Xie, C.; Zheng, H. Application of Improved Cuckoo Search Algorithm to Path Planning Unmanned Aerial Vehicle. In Intelligent Computing Theories and Application, Proceedings of the 12th International Conference, ICIC 2016, Lanzhou, China, 2–5 August 2016; Springer International Publishing: Cham, Switzerland, 2016; pp. 722–729. [Google Scholar] [CrossRef]
- Eusuff, M.M.; Lansey, K.E. Optimization of Water Distribution Network Design Using the Shuffled Frog Leaping Algorithm. J. Water Resour. Plan. Manag. 2003, 129, 210–225. [Google Scholar] [CrossRef]
- Ni, J.; Yin, X.; Chen, J.; Li, X. An improved shuffled frog leaping algorithm for robot path planning. In Proceedings of the 2014 10th International Conference on Natural Computation (ICNC), Xiamen, China, 19–21 August 2014; pp. 545–549. [Google Scholar] [CrossRef]
- Hidalgo-Paniagua, A.; Vega-Rodríguez, M.A.; Ferruz, J.; Pavón, N. MOSFLA-MRPP: Multi-Objective Shuffled Frog-Leaping Algorithm applied to Mobile Robot Path Planning. Eng. Appl. Artif. Intell. 2015, 44, 123–136. [Google Scholar] [CrossRef]
- Shubhasri, K.; Parhi, D.R. Navigation Based on Adaptive Shuffled Frog-Leaping Algorithm for Underwater Mobile Robot. In Intelligent Computing, Communication and Devices; Springer: New Delhi, India, 2015; pp. 651–659. [Google Scholar] [CrossRef]
- Luo, J.; Chen, M.-R. Improved Shuffled Frog Leaping Algorithm and its multi-phase model for multi-depot vehicle routing problem. Expert Syst. Appl. 2014, 41, 2535–2545. [Google Scholar] [CrossRef]
- Liang, B.; Zhen, Z.; Jiang, J. Modified shuffled frog leaping algorithm optimized control for air-breathing hypersonic flight vehicle. Int. J. Adv. Robot. Syst. 2016, 13, 172988141667813. [Google Scholar] [CrossRef]
- Pu, X.; Xiong, C.; Zhao, L. Path Planning for Robot Based on IACO-SFLA Hybrid Algorithm. In Proceedings of the 2020 Chinese Control And Decision Conference (CCDC), Hefei, China, 22–24 August 2020; pp. 4886–4893. [Google Scholar] [CrossRef]
- Yang, X.-S. Nature-Inspired Optimization Algorithms; Elsevier: Amsterdam, The Netherlands, 2014. [Google Scholar] [CrossRef]
- Yuan, X.; Yuan, X.; Wang, X. Path Planning for Mobile Robot Based on Improved Bat Algorithm. Sensors 2021, 21, 4389. [Google Scholar] [CrossRef]
- Wang, G.; Guo, L.; Duan, H.; Liu, L.; Wang, H. A Bat Algorithm with Mutation for UCAV Path Planning. Sci. World J. 2012, 2012, 418946. [Google Scholar] [CrossRef] [Green Version]
- Xin, G.; Shi, L.; Long, G.; Pan, W.; Li, Y.; Xu, J. Mobile robot path planning with reformative bat algorithm. PLoS ONE 2022, 17, e0276577. [Google Scholar] [CrossRef]
- Lin, N.; Tang, J.; Li, X.; Zhao, L. A Novel Improved Bat Algorithm in UAV Path Planning. Comput. Mater. Contin. 2019, 61, 323–344. [Google Scholar] [CrossRef]
- Zhou, X.; Gao, F.; Fang, X.; Lan, Z. Improved Bat Algorithm for UAV Path Planning in Three-Dimensional Space. IEEE Access 2021, 9, 20100–20116. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, Z.; Si, L.; Tong, K.; Tan, C. A novel path planning method of mobile robots based on an improved bat algorithm. Proc. Inst. Mech. Eng. C J. Mech. Eng. Sci. 2021, 235, 3071–3086. [Google Scholar] [CrossRef]
- Ajeil, F.H.; Ibraheem, I.K.; Humaidi, A.J.; Khan, Z.H. A novel path planning algorithm for mobile robot in dynamic environments using modified bat swarm optimization. J. Eng. 2021, 2021, 37–48. [Google Scholar] [CrossRef]
- Ibraheem, K.I.; Ajeil, F.H. Autonomous Mobile Robot Navigation and Obstacle Avoidance in Dynamic Environment using Modified Bat Swarm Optimization. In Proceedings of the 1st International Conference on Recent Trends of Engineering Sciences and Sustainability, Baghdad, Iraq, 17 May 2017; pp. 17–18. [Google Scholar]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Chhillar, A.; Choudhary, A. Mobile Robot Path Planning Based Upon Updated Whale Optimization Algorithm. In Proceedings of the 2020 10th International Conference on Cloud Computing, Data Science & Engineering (Confluence), Noida, India, 29–31 January 2020; pp. 684–691. [Google Scholar] [CrossRef]
- Dai, Y.; Yu, J.; Zhang, C.; Zhan, B.; Zheng, X. A novel whale optimization algorithm of path planning strategy for mobile robots. Appl. Intell. 2022, 53, 10843–10857. [Google Scholar] [CrossRef]
- Dao, T.-K.; Pan, T.-S.; Pan, J.-S. A multi-objective optimal mobile robot path planning based on whale optimization algorithm. In Proceedings of the IEEE 13th International Conference on Signal Processing (ICSP), Chengdu, China, 6–10 November 2016; pp. 337–342. [Google Scholar] [CrossRef]
- Yan, Z.; Zhang, J.; Zeng, J.; Tang, J. Three-dimensional path planning for autonomous underwater vehicles based on a whale optimization algorithm. Ocean Eng. 2022, 250, 111070. [Google Scholar] [CrossRef]
- Liu, J.; Chen, Z.; Liu, Q.; Shen, R.; Hou, L.; Zhang, Y. Design of Mobile Robot Path Planning Algorithm Based on Improved Whale Optimization Algorithm. In Proceedings of the 2022 7th International Conference on Multimedia and Image Processing, Tianjin, China, 14–16 January 2022; pp. 231–235. [Google Scholar] [CrossRef]
- Yan, Z.; Zhang, J.; Yang, Z.; Tang, J. Two-dimensional optimal path planning for autonomous underwater vehicle using a whale optimization algorithm. Concurr. Comput. 2021, 33, e6140. [Google Scholar] [CrossRef]
- Zan, J.; Ku, P.; Jin, S. Research on robot path planning based on whale optimization algorithm. In Proceedings of the 2021 5th Asian Conference on Artificial Intelligence Technology (ACAIT), Haikou, China, 29–31 October 2021; pp. 500–504. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Dewangan, R.K.; Shukla, A.; Godfrey, W.W. Three dimensional path planning using Grey wolf optimizer for UAVs. Appl. Intell. 2019, 49, 2201–2217. [Google Scholar] [CrossRef]
- Albina, K.; Lee, S.G. Hybrid Stochastic Exploration Using Grey Wolf Optimizer and Coordinated Multi-Robot Exploration Algorithms. IEEE Access 2019, 7, 14246–14255. [Google Scholar] [CrossRef]
- Kamalova, A.; Navruzov, S.; Qian, D.; Lee, S.G. Multi-Robot Exploration Based on Multi-Objective Grey Wolf Optimizer. Appl. Sci. 2019, 9, 2931. [Google Scholar] [CrossRef] [Green Version]
- Ge, F.; Li, K.; Xu, W.; Wang, Y. Path Planning of UAV for Oilfield Inspection Based on Improved Grey Wolf Optimization Algorithm. In Proceedings of the 2019 Chinese Control And Decision Conference (CCDC), Nanchang, China, 3–5 June 2019; pp. 3666–3671. [Google Scholar] [CrossRef]
- Kamalova, A.; Kim, K.D.; Lee, S.G. Waypoint Mobile Robot Exploration Based on Biologically Inspired Algorithms. IEEE Access 2020, 8, 190342–190355. [Google Scholar] [CrossRef]
- Liu, J.; Wei, X.; Huang, H. An Improved Grey Wolf Optimization Algorithm and its Application in Path Planning. IEEE Access 2021, 9, 121944–121956. [Google Scholar] [CrossRef]
- Yang, X.; Yuxi, H.; Qiuhong, L. Robot path planning based on the improved grey wolf optimization algorithm. In Proceedings of the 2022 Power System and Green Energy Conference (PSGEC), Shanghai, China, 25–27 August 2022; pp. 543–547. [Google Scholar] [CrossRef]
- Chen, Y.; Cheng, C.; Zhang, Y.; Li, X.; Sun, L. A Neural Network-Based Navigation Approach for Autonomous Mobile Robot Systems. Appl. Sci. 2022, 12, 7796. [Google Scholar] [CrossRef]
- Abdulsaheb, J.A.; Kadhim, D.J. Multi-Objective Robot Path Planning Using an Improved Hunter Prey Optimization Algorithm. Int. J. Intell. Eng. Syst. 2023, 16, 215–227. [Google Scholar] [CrossRef]
- Mohanty, P.K.; Parhi, D.R. A new efficient optimal path planner for mobile robot based on Invasive Weed Optimization algorithm. Front. Mech. Eng. 2014, 9, 317–330. [Google Scholar] [CrossRef]
- Kundu, S.; Parhi, D.R. Navigation of underwater robot based on dynamically adaptive harmony search algorithm. Memetic Comput. 2016, 8, 125–146. [Google Scholar] [CrossRef]
- Zhu, Z.; Xiao, J.; Li, J.-Q.; Wang, F.; Zhang, Q. Global path planning of wheeled robots using multi-objective memetic algorithms. Integr. Comput. Aided Eng. 2015, 22, 387–404. [Google Scholar] [CrossRef]
- Hidalgo-Paniagua, A.; Vega-Rodríguez, M.A.; Ferruz, J. Applying the MOVNS (multi-objective variable neighborhood search) algorithm to solve the path planning problem in mobile robotics. Expert Syst. Appl. 2016, 58, 20–35. [Google Scholar] [CrossRef]
- Salmanpour, S.; Monfared, H.; Omranpour, H. Solving robot path planning problem by using a new elitist multi-objective IWD algorithm based on coefficient of variation. Soft Comput. 2017, 21, 3063–3079. [Google Scholar] [CrossRef]
- Ullah, I.; Shen, Y.; Su, X.; Esposito, C.; Choi, C. A Localization Based on Unscented Kalman Filter and Particle Filter Localization Algorithms. IEEE Access 2020, 8, 2233–2246. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. No | Techniques | Hybrid Algorithm | Year | Environment | Experiment | Dynamic Goal | Multi-Robot | Kinematic |
|---|---|---|---|---|---|---|---|---|
| [19] | RM | 🗴 | 2008 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [20] | RM | 🗴 | 2004 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [21] | RM | 🗴 | 2007 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [22] | RM | 🗴 | 2007 | Static | Simulation | 🗴 | 🗴 | ✓ |
| [23] | RM | 🗴 | 1996 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [24] | RM | 🗴 | 2001 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [25] | RM | 🗴 | 2013 | Static | Real-time and Simulation | 🗴 | 🗴 | 🗴 |
| [26] | RM | 🗴 | 2022 | Dynamic | Real-time and Simulation | 🗴 | 🗴 | 🗴 |
| [27] | RM | 🗴 | 2022 | Dynamic | Real-time and Simulation | 🗴 | 🗴 | 🗴 |
| [28] | RM | 🗴 | 2019 | static | Simulation | 🗴 | 🗴 | 🗴 |
| [29] | RM | 🗴 | 2022 | static | Simulation | 🗴 | 🗴 | 🗴 |
| [32] | CD | 🗴 | 1990 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [33] | CD | ✓ | 2004 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [34] | CD | 🗴 | 1999 | Static | Simulation | 🗴 | 🗴 | ✓ |
| [35] | CD | 🗴 | 2009 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [36] | CD | 🗴 | 2013 | Static | Real-time and Simulation | 🗴 | 🗴 | ✓ |
| [37] | CD | ✓ | 2009 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [38] | CD | ✓ | 2016 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [39] | CD | ✓ | 2010 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [40] | CD | 🗴 | 2017 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [41] | CD | ✓ | 2016 | Static | Simulation | 🗴 | 🗴 | ✓ |
| [42] | CD | 🗴 | 2021 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [43] | APF | 🗴 | 1985 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [44] | APF | 🗴 | 1991 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [45] | APF | 🗴 | 1992 | Static | Simulation | 🗴 | 🗴 | ✓ |
| [46] | APF | 🗴 | 1989 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [47] | APF | 🗴 | 2002 | Dynamic | Real-time and Simulation | ✓ | 🗴 | ✓ |
| [48] | APF | ✓ | 2015 | Dynamic | Simulation | 🗴 | 🗴 | 🗴 |
| [49] | APF | 🗴 | 2000 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [50] | APF | 🗴 | 2009 | Dynamic | Simulation | ✓ | 🗴 | ✓ |
| [51] | APF | 🗴 | 2009 | Static | Simulation | 🗴 | 🗴 | ✓ |
| [52] | APF | 🗴 | 2011 | Static | Simulation | 🗴 | 🗴 | ✓ |
| [53] | APF | 🗴 | 2006 | Static | Simulation | 🗴 | ✓ | 🗴 |
| [54] | APF | 🗴 | 2021 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [55] | APF | 🗴 | 2022 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [56] | APF | 🗴 | 2022 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [57] | APF | 🗴 | 2022 | Dynamic | Simulation | 🗴 | 🗴 | ✓ |
| [58] | APF | ✓ | 1993 | Dynamic | Simulation | 🗴 | 🗴 | ✓ |
| [61] | GA | 🗴 | 2014 | Static | Simulation | 🗴 | ✓ | 🗴 |
| [62] | GA | 🗴 | 2014 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [63] | GA | 🗴 | 2006 | Dynamic | Simulation | 🗴 | ✓ | 🗴 |
| [64] | GA | 🗴 | 2013 | Static | Simulation | 🗴 | ✓ | 🗴 |
| [65] | GA | 🗴 | 2016 | Static | Real-time and Simulation | 🗴 | ✓ | 🗴 |
| [66] | GA | ✓ | 2018 | Static | Real-time and Simulation | 🗴 | ✓ | 🗴 |
| [67] | GA | ✓ | 2018 | Static | Real-time and Simulation | 🗴 | 🗴 | ✓ |
| [68] | GA | 🗴 | 2018 | Dynamic | Simulation | ✓ | 🗴 | ✓ |
| [69] | GA | 🗴 | 2017 | Dynamic | Real-time and Simulation | ✓ | ✓ | 🗴 |
| [70] | GA | ✓ | 1998 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [71] | GA | 🗴 | 2011 | Static | Simulation | 🗴 | 🗴 | ✓ |
| [72] | GA | ✓ | 2022 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [73] | GA | ✓ | 2021 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [75] | ACO | ✓ | 2007 | Dynamic | Real-time and Simulation | ✓ | ✓ | 🗴 |
| [76] | ACO | 🗴 | 2006 | Static | Simulation | 🗴 | ✓ | 🗴 |
| [77] | ACO | ✓ | 2015 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [78] | ACO | ✓ | 2018 | Static | Real-time and Simulation | 🗴 | ✓ | 🗴 |
| [79] | ACO | 🗴 | 2017 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [80] | ACO | 🗴 | 2017 | Dynamic | Real-time and Simulation | 🗴 | 🗴 | 🗴 |
| [81] | ACO | ✓ | 2013 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [82] | ACO | 🗴 | 2010 | Dynamic | Simulation | 🗴 | 🗴 | 🗴 |
| [83] | ACO | 🗴 | 2008 | Static | Simulation | 🗴 | 🗴 | ✓ |
| [84] | ACO | 🗴 | 2009 | Static | Simulation | 🗴 | 🗴 | ✓ |
| [85] | ACO | 🗴 | 2013 | Static | Simulation | ✓ | 🗴 | ✓ |
| [86] | ACO | ✓ | 2022 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [87] | ACO | 🗴 | 2021 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [88] | ACO | ✓ | 2021 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [90] | PSO | 🗴 | 2014 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [91] | PSO | ✓ | 2013 | Static | Real-time and Simulation | 🗴 | 🗴 | ✓ |
| [92] | PSO | 🗴 | 2010 | Dynamic | Real-time and Simulation | 🗴 | 🗴 | ✓ |
| [93] | PSO | 🗴 | 2011 | Dynamic | Simulation | 🗴 | 🗴 | ✓ |
| [94] | PSO | 🗴 | 2013 | Static | Real-time and Simulation | 🗴 | ✓ | ✓ |
| [95] | PSO | ✓ | 2013 | Static | Real-time and Simulation | 🗴 | 🗴 | ✓ |
| [96] | PSO | ✓ | 2016 | Static | Real-time and Simulation | 🗴 | ✓ | 🗴 |
| [97] | PSO | ✓ | 2015 | Static | Real-time and Simulation | 🗴 | 🗴 | 🗴 |
| [98] | PSO | 🗴 | 2017 | Static | Simulation | 🗴 | 🗴 | ✓ |
| [99] | PSO | ✓ | 2017 | Static | Real-time and Simulation | 🗴 | 🗴 | ✓ |
| [101] | PSO | 🗴 | 2015 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [102] | PSO | 🗴 | 2008 | Static | Simulation | 🗴 | 🗴 | ✓ |
| [103] | PSO | 🗴 | 2021 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [104] | PSO | ✓ | 2021 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [105] | PSO | 🗴 | 2021 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [107] | BFO | 🗴 | 2005 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [108] | BFO | 🗴 | 2006 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [109] | BFO | 🗴 | 2013 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [110] | BFO | 🗴 | 2008 | Static | Simulation | 🗴 | 🗴 | ✓ |
| [111] | BFO | 🗴 | 2017 | Dynamic | Simulation | 🗴 | 🗴 | 🗴 |
| [112] | BFO | ✓ | 2012 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [113] | BFO | 🗴 | 2006 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [114] | BFO | 🗴 | 2010 | Static | Simulation | 🗴 | 🗴 | ✓ |
| [116] | ABC | ✓ | 2015 | Static | Real-time and Simulation | 🗴 | 🗴 | ✓ |
| [117] | ABC | 🗴 | 2009 | Static | Simulation | 🗴 | 🗴 | ✓ |
| [118] | ABC | 🗴 | 2010 | Dynamic | Simulation | 🗴 | 🗴 | ✓ |
| [119] | ABC | 🗴 | 2011 | Static | Simulation | 🗴 | ✓ | 🗴 |
| [120] | ABC | 🗴 | 2015 | Static | Simulation | 🗴 | ✓ | ✓ |
| [121] | ABC | 🗴 | 2011 | Static | Simulation | 🗴 | 🗴 | ✓ |
| [122] | ABC | 🗴 | 2014 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [123] | ABC | 🗴 | 2012 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [124] | ABC | ✓ | 2014 | Static | Simulation | 🗴 | 🗴 | ✓ |
| [125] | ABC | ✓ | 2015 | Static | Real-time and Simulation | 🗴 | 🗴 | ✓ |
| [126] | ABC | ✓ | 2022 | Static | Real-time and Simulation | 🗴 | 🗴 | 🗴 |
| [127] | ABC | ✓ | 2021 | Static | Real-time and Simulation | 🗴 | 🗴 | 🗴 |
| [129] | FF | 🗴 | 2015 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [130] | FF | 🗴 | 2013 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [131] | FF | 🗴 | 2015 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [132] | FF | 🗴 | 2013 | Static | Real-time and Simulation | 🗴 | 🗴 | 🗴 |
| [133] | FF | 🗴 | 2008 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [134] | FF | 🗴 | 2012 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [135] | FF | 🗴 | 2017 | Static | Real-time and Simulation | 🗴 | 🗴 | ✓ |
| [136] | FF | 🗴 | 2013 | Static | Simulation | 🗴 | ✓ | 🗴 |
| [137] | FF | 🗴 | 2015 | Static | Real-time and Simulation | 🗴 | 🗴 | ✓ |
| [138] | FF | 🗴 | 2018 | Static | Real-time and Simulation | 🗴 | 🗴 | 🗴 |
| [139] | FF | ✓ | 2016 | Static | Simulation | 🗴 | 🗴 | ✓ |
| [140] | FF | 🗴 | 2018 | Static | Simulation | 🗴 | 🗴 | ✓ |
| [141] | FF | 🗴 | 2015 | Static | Simulation | 🗴 | 🗴 | ✓ |
| [142] | FF | 🗴 | 2018 | Dynamic | Real-time and Simulation | ✓ | ✓ | 🗴 |
| [143] | FF | 🗴 | 2020 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [145] | CS | 🗴 | 2016 | Static | Real-time and Simulation | 🗴 | 🗴 | 🗴 |
| [146] | CS | ✓ | 2015 | Static | Real-time and Simulation | 🗴 | ✓ | 🗴 |
| [147] | CS | ✓ | 2015 | Static | Simulation | 🗴 | 🗴 | ✓ |
| [148] | CS | 🗴 | 2016 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [150] | SFL | 🗴 | 2014 | Dynamic | Simulation | 🗴 | 🗴 | 🗴 |
| [151] | SFL | 🗴 | 2015 | Static | Simulation | 🗴 | 🗴 | ✓ |
| [152] | SFL | 🗴 | 2015 | Static | Real-time and Simulation | 🗴 | 🗴 | ✓ |
| [153] | SFL | 🗴 | 2014 | Static | Simulation | 🗴 | 🗴 | ✓ |
| [154] | SFL | 🗴 | 2016 | Dynamic | Simulation | 🗴 | 🗴 | ✓ |
| [155] | SFL | ✓ | 2020 | Static | Simulation | 🗴 | 🗴 | ✓ |
| [157] | BA | ✓ | 2021 | Dynamic | Simulation | 🗴 | 🗴 | ✓ |
| [159] | BA | 🗴 | 2022 | Static | Real-time and Simulation | 🗴 | 🗴 | 🗴 |
| [160] | BA | 🗴 | 2019 | Dynamic | Simulation | 🗴 | 🗴 | 🗴 |
| [161] | BA | ✓ | 2021 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [162] | BA | 🗴 | 2020 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [163] | BA | 🗴 | 2021 | Dynamic | Simulation | 🗴 | 🗴 | 🗴 |
| [164] | BA | 🗴 | 2017 | Dynamic | Simulation | 🗴 | 🗴 | 🗴 |
| [166] | WOA | 🗴 | 2020 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [167] | WOA | 🗴 | 2022 | Dynamic | Simulation | 🗴 | 🗴 | 🗴 |
| [168] | WOA | 🗴 | 2016 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [169] | WOA | 🗴 | 2022 | Static | Simulation | 🗴 | 🗴 | ✓ |
| [170] | WOA | 🗴 | 2022 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [171] | WOA | 🗴 | 2021 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [172] | WOA | 🗴 | 2021 | Static | Simulation | 🗴 | 🗴 | ✓ |
| [174] | GWO | 🗴 | 2019 | Static | Simulation | 🗴 | ✓ | 🗴 |
| [175] | GWO | ✓ | 2019 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [176] | GWO | 🗴 | 2019 | Static | Simulation | 🗴 | ✓ | 🗴 |
| [177] | GWO | 🗴 | 2019 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [178] | GWO | 🗴 | 2020 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [179] | GWO | ✓ | 2021 | Static | Simulation | 🗴 | 🗴 | 🗴 |
| [180] | GWO | ✓ | 2022 | Static | Simulation | 🗴 | 🗴 | ✓ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdulsaheb, J.A.; Kadhim, D.J. Classical and Heuristic Approaches for Mobile Robot Path Planning: A Survey. Robotics 2023, 12, 93. https://doi.org/10.3390/robotics12040093
Abdulsaheb JA, Kadhim DJ. Classical and Heuristic Approaches for Mobile Robot Path Planning: A Survey. Robotics. 2023; 12(4):93. https://doi.org/10.3390/robotics12040093
Chicago/Turabian StyleAbdulsaheb, Jaafar Ahmed, and Dheyaa Jasim Kadhim. 2023. "Classical and Heuristic Approaches for Mobile Robot Path Planning: A Survey" Robotics 12, no. 4: 93. https://doi.org/10.3390/robotics12040093