
Yutu-2 Radar Observations at the Chang’E-4 Landing Site: The Shallow Geological Structure and Its Dielectric Properties


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
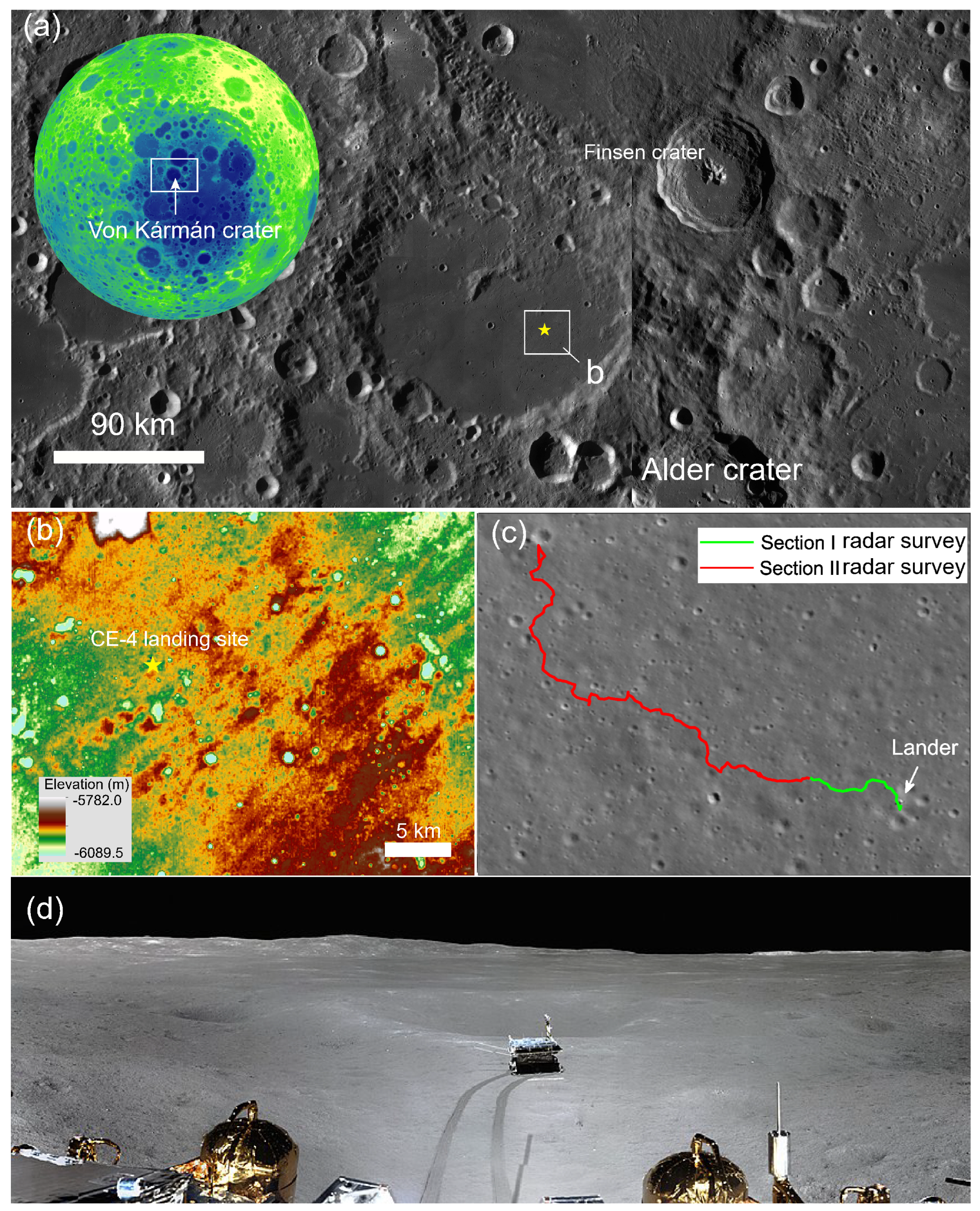
- Smooth terrain on the bottom of Von Kármán crater: The relatively flat bottom of the Von Kármán crater is crucial for the safe landing of the lander and rover [21]. The lander requires a relatively flat area to reduce risks and ensure a successful and stable landing.
- Rich geological features: The Von Kármán crater’s bottom exhibits a wealth of geological features. These features provide a unique opportunity for scientists to gain a deeper understanding of the geology and evolutionary history beneath the lunar surface [22]. Most importantly, previous studies discovered water and hydroxyl signatures in rocks on the Moon [23,24].
- Formation of the Von Kármán crater: The process of the Von Kármán crater’s formation may have involved excavating material from the Moon’s interior [25], including substances from the lunar mantle, such as olivine and pyroxene [26]. These materials may have been ejected to the surface during the crater’s formation, offering valuable insights into the Moon’s early formation.

2. Shallow Geological Structures of CE-4 Landing Site
2.1. High-Frequency LPR Radar Observation

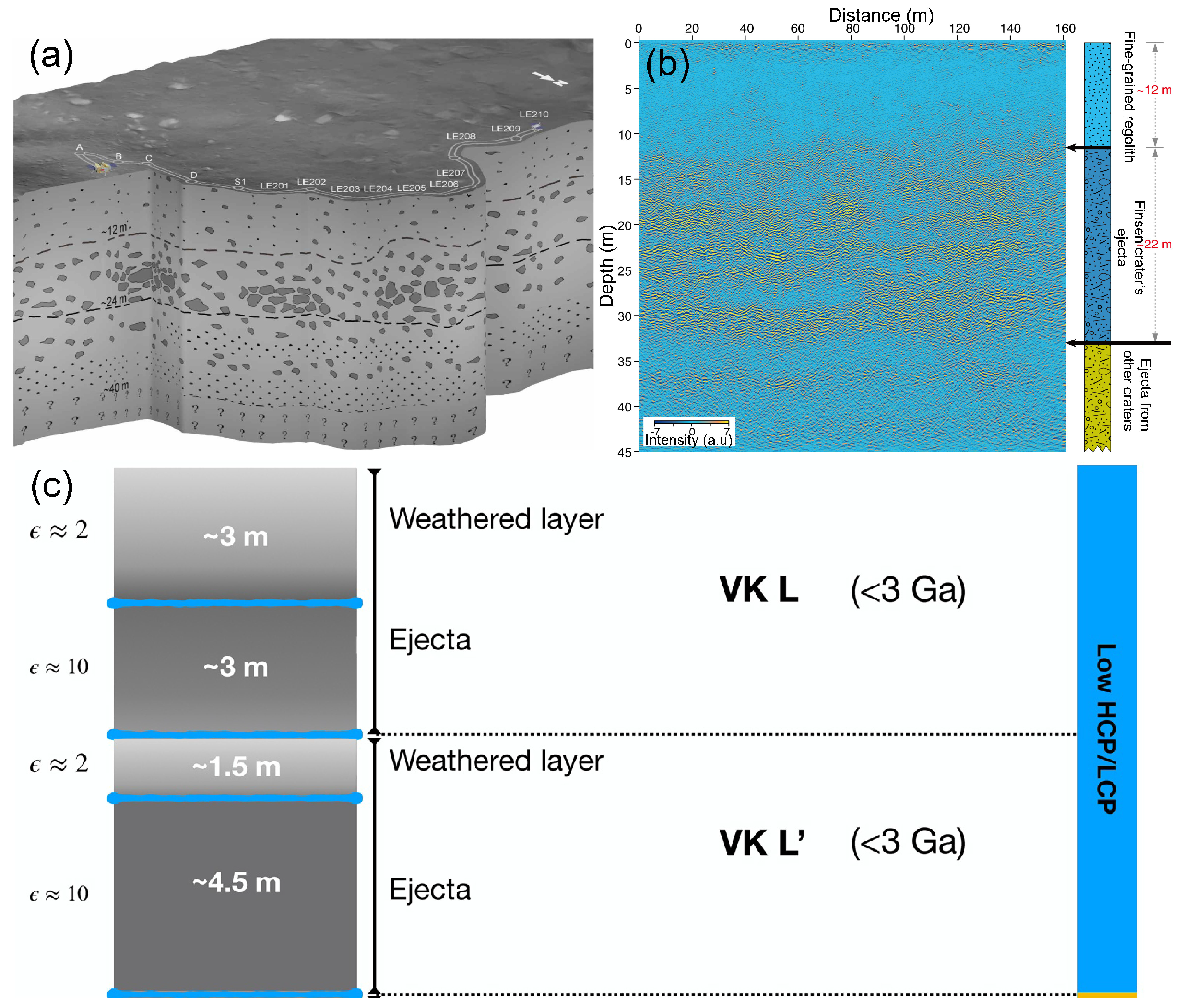
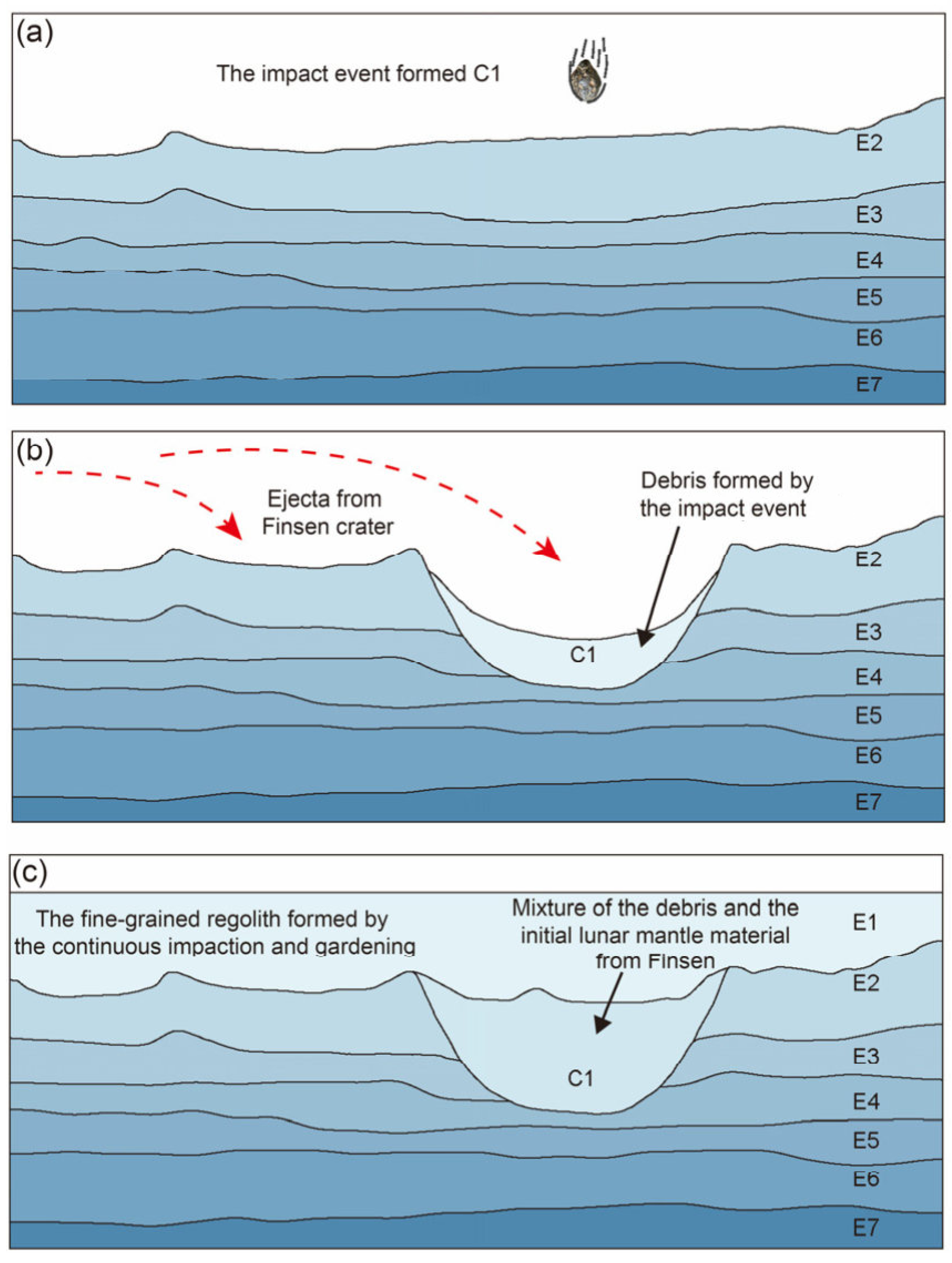
- The unmodified or moved ejecta material from the impact crater.
- Local substances modified by impacts from the ejecta.
- The fine-grained lunar regolith that is naturally formed after an impact event [8].
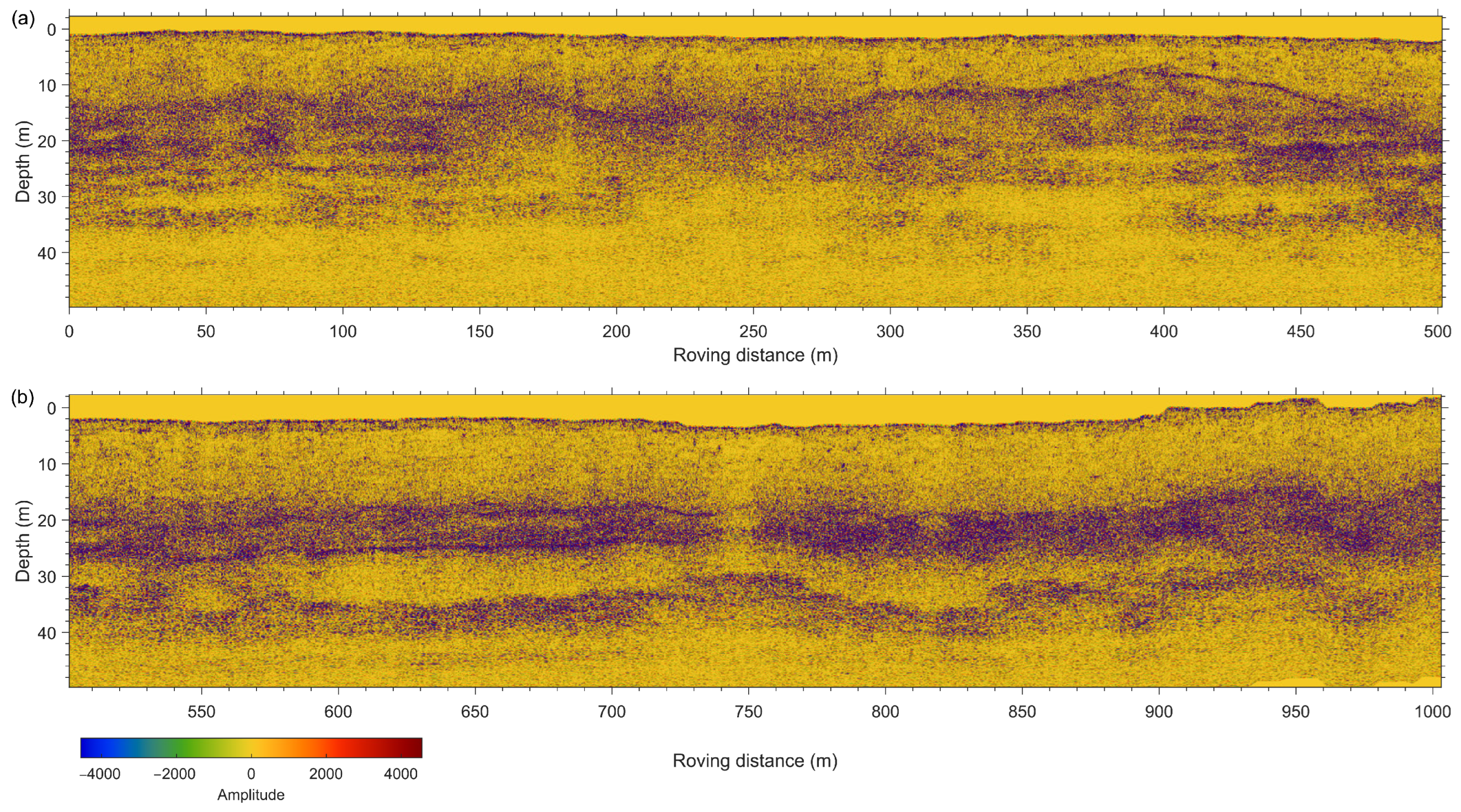
2.2. Low-Frequency LPR Radar Observation
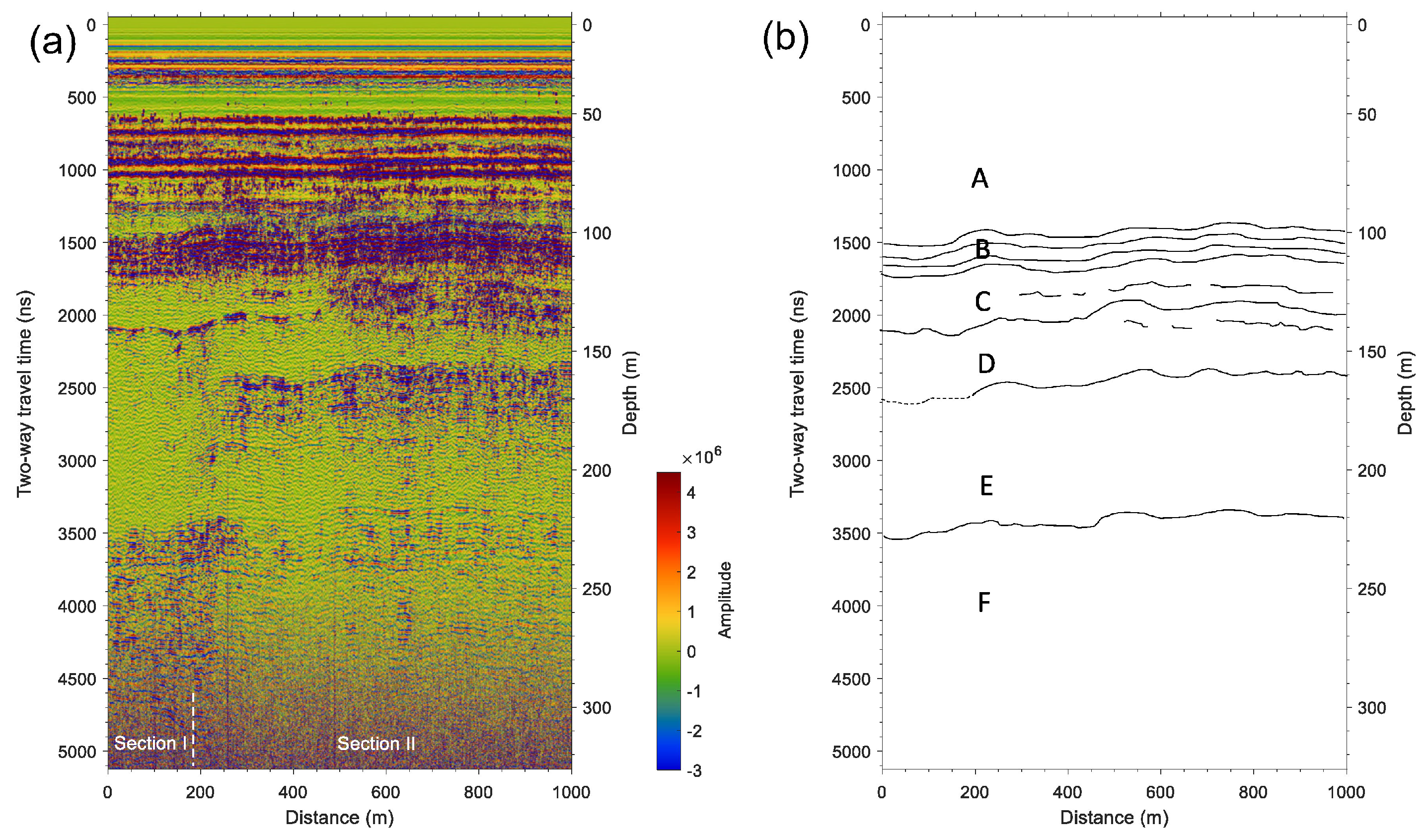
- The first layer (0~110 m) is the sedimentary layer ejected from other craters.
- The second layer (110~240 m) is the Imbrium basalt layer.
- The third layer (240~440 m) is ejecta from the Leibniz crater.
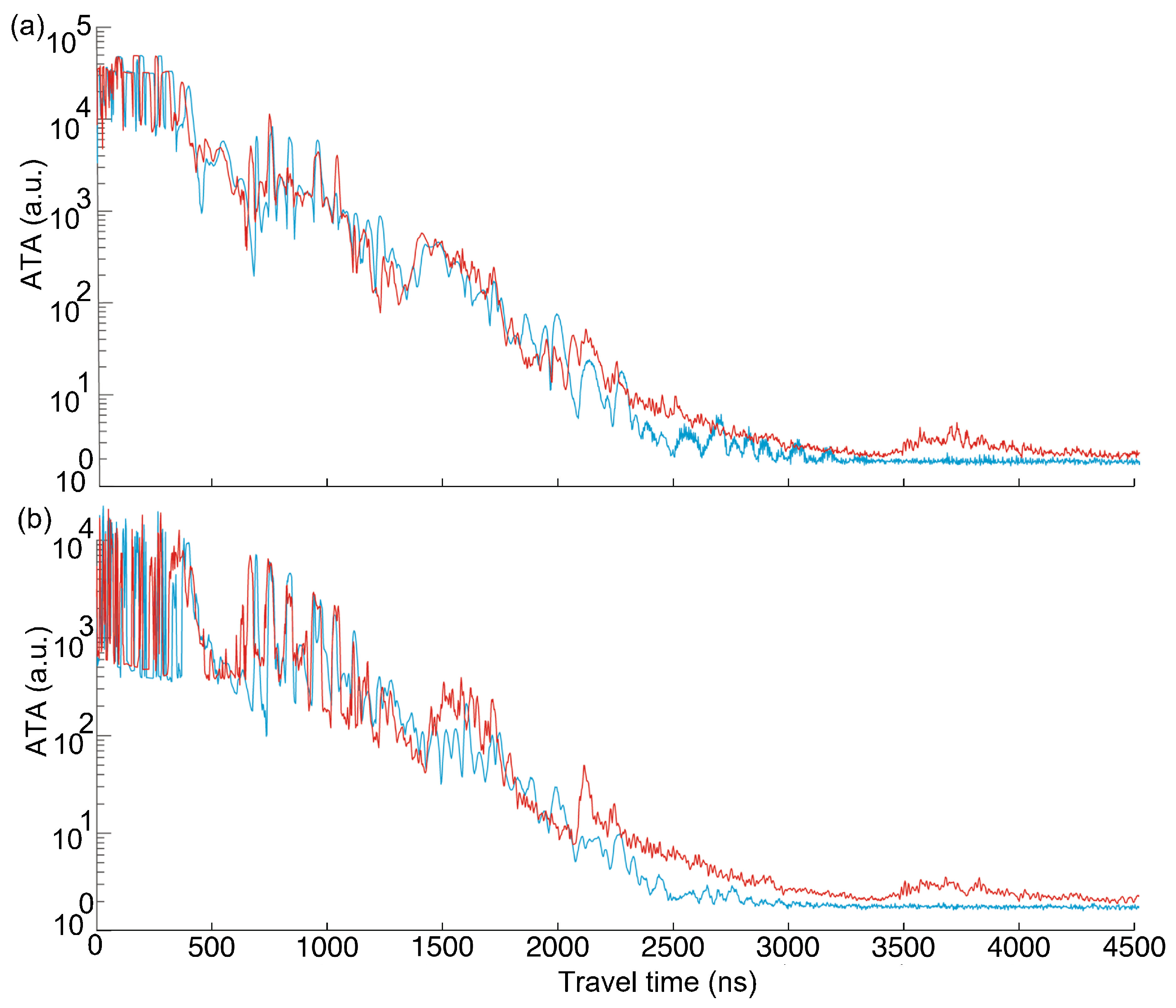
2.3. Effectiveness of Low-Frequency Radar Data
3. Dielectric Properties of the Lunar Subsurface Materials
3.1. Dielectric Constant Estimation
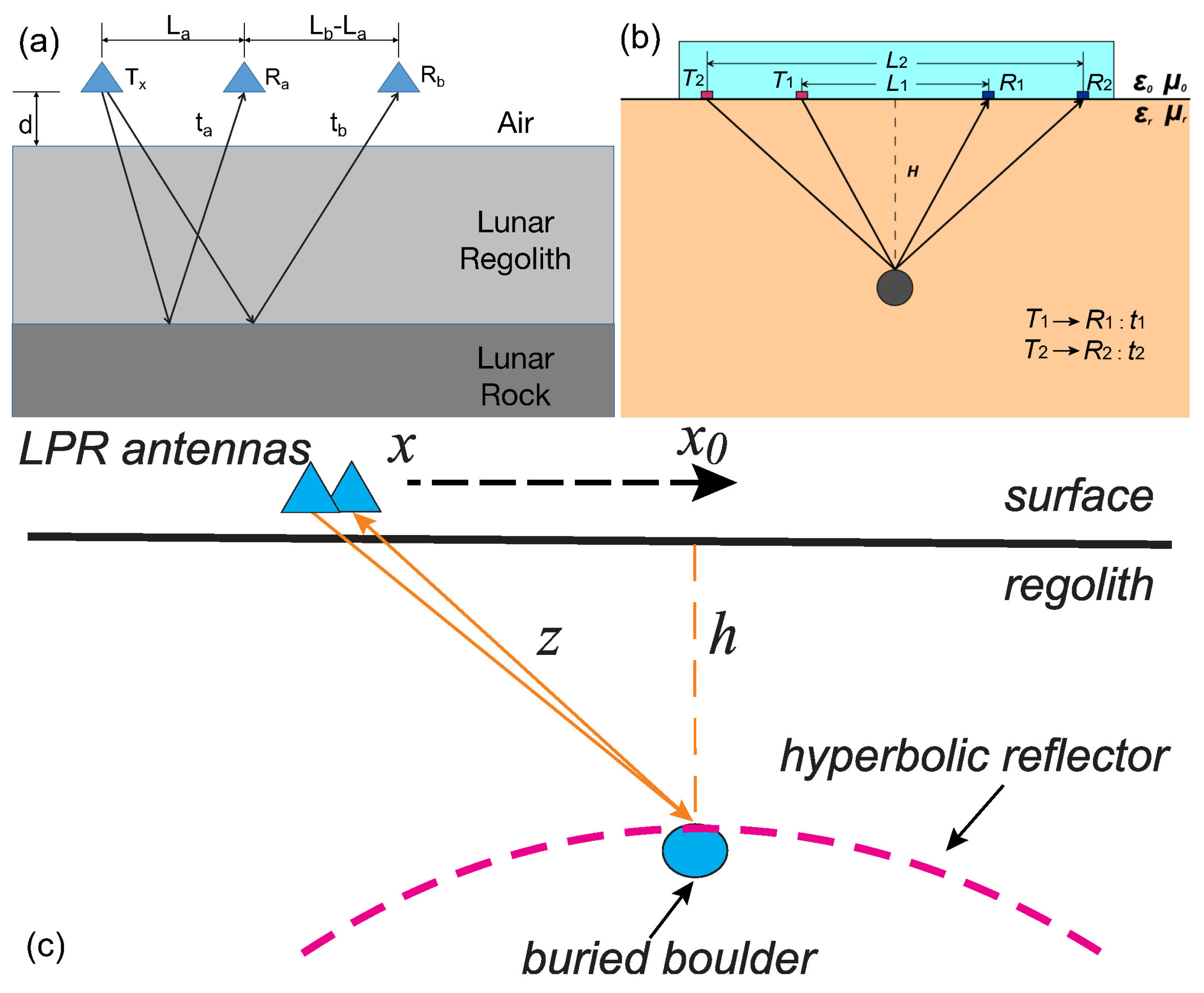
3.1.1. Calibration Method and Dual-Antenna Time Delay Method
3.1.2. Hyperbolic Fitting Method
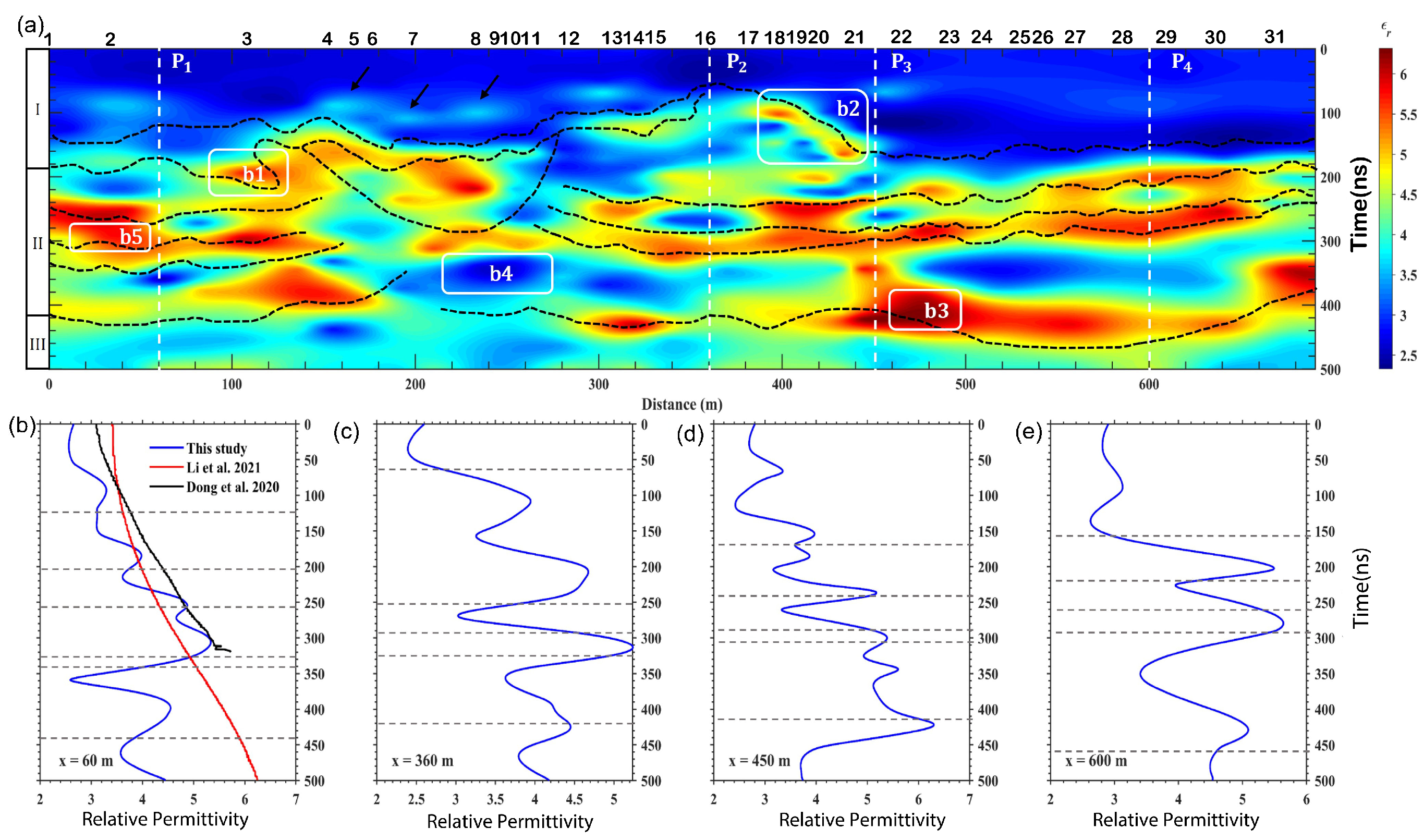
3.1.3. Distribution of Dielectric Constant at the CE-4 Landing Site


3.2. Loss Tangent Calculation
3.2.1. Energy Attenuation Method
3.2.2. Frequency Shift Method
3.2.3. Distribution of Loss Tangent at Landing Site
4. Radar Observation of Special Geological Features on the Moon
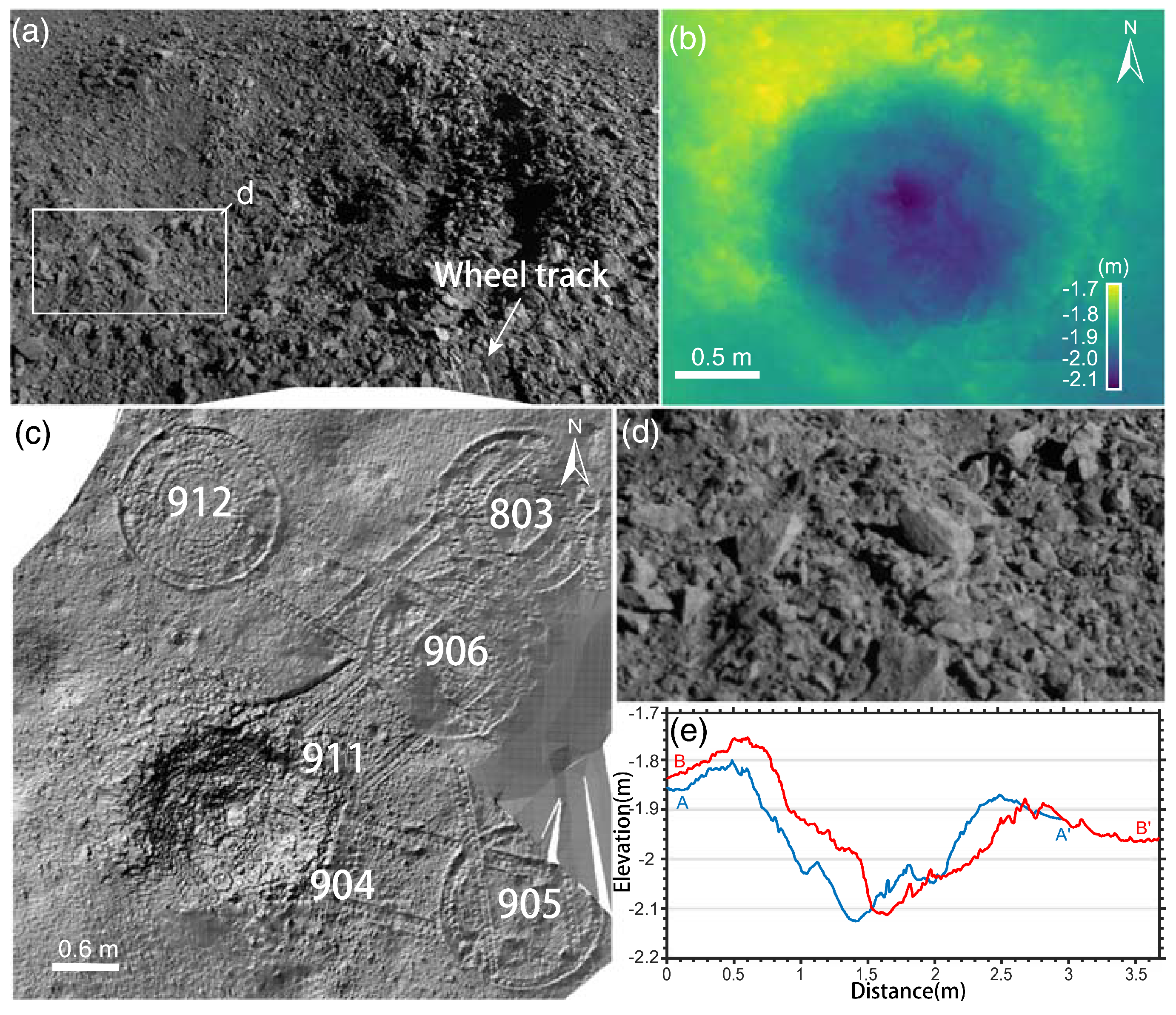
4.1. Evidence of Fragments from Small Craters
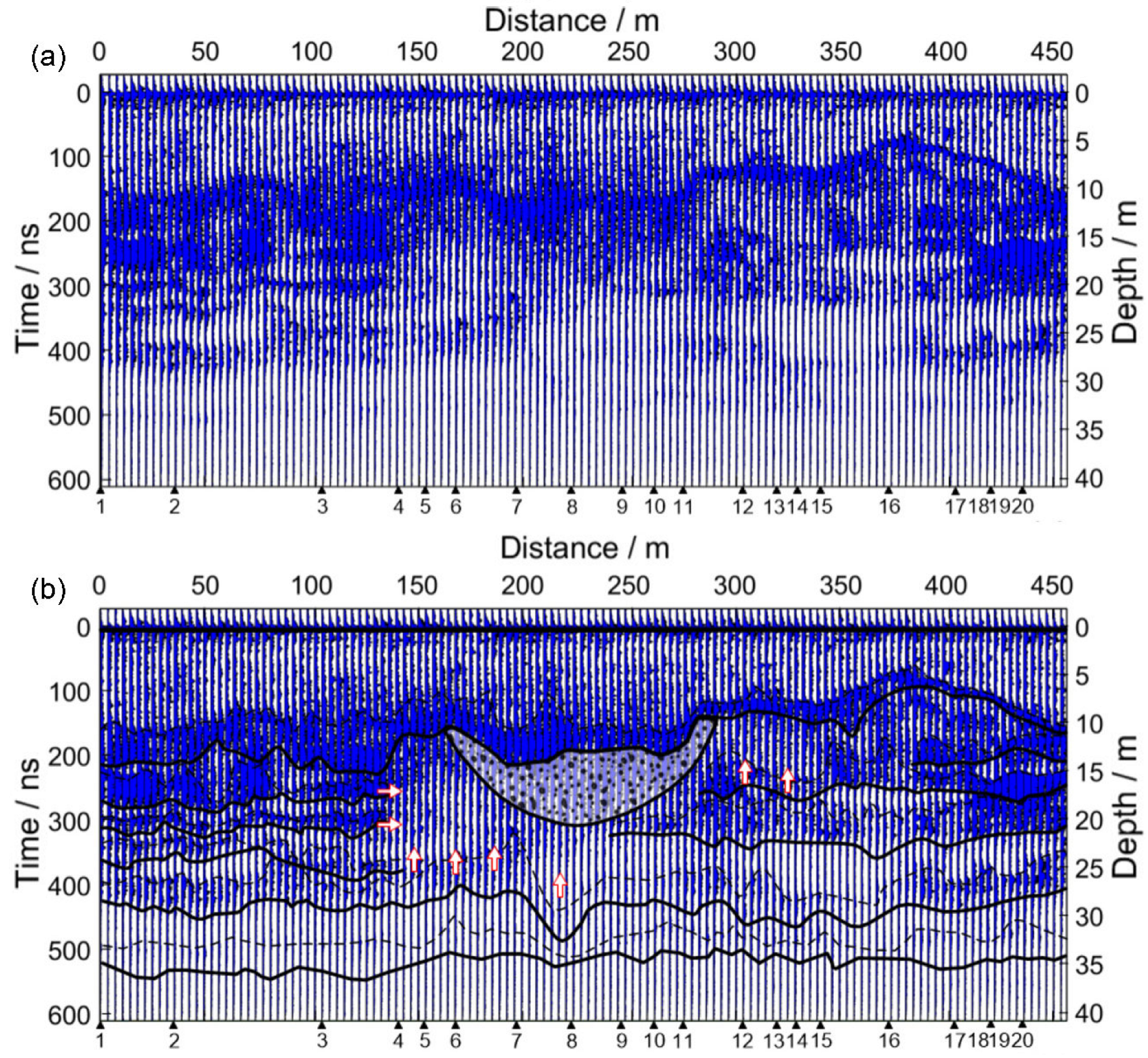
4.2. The Buried Crater Observed by the Yutu-2 Radar
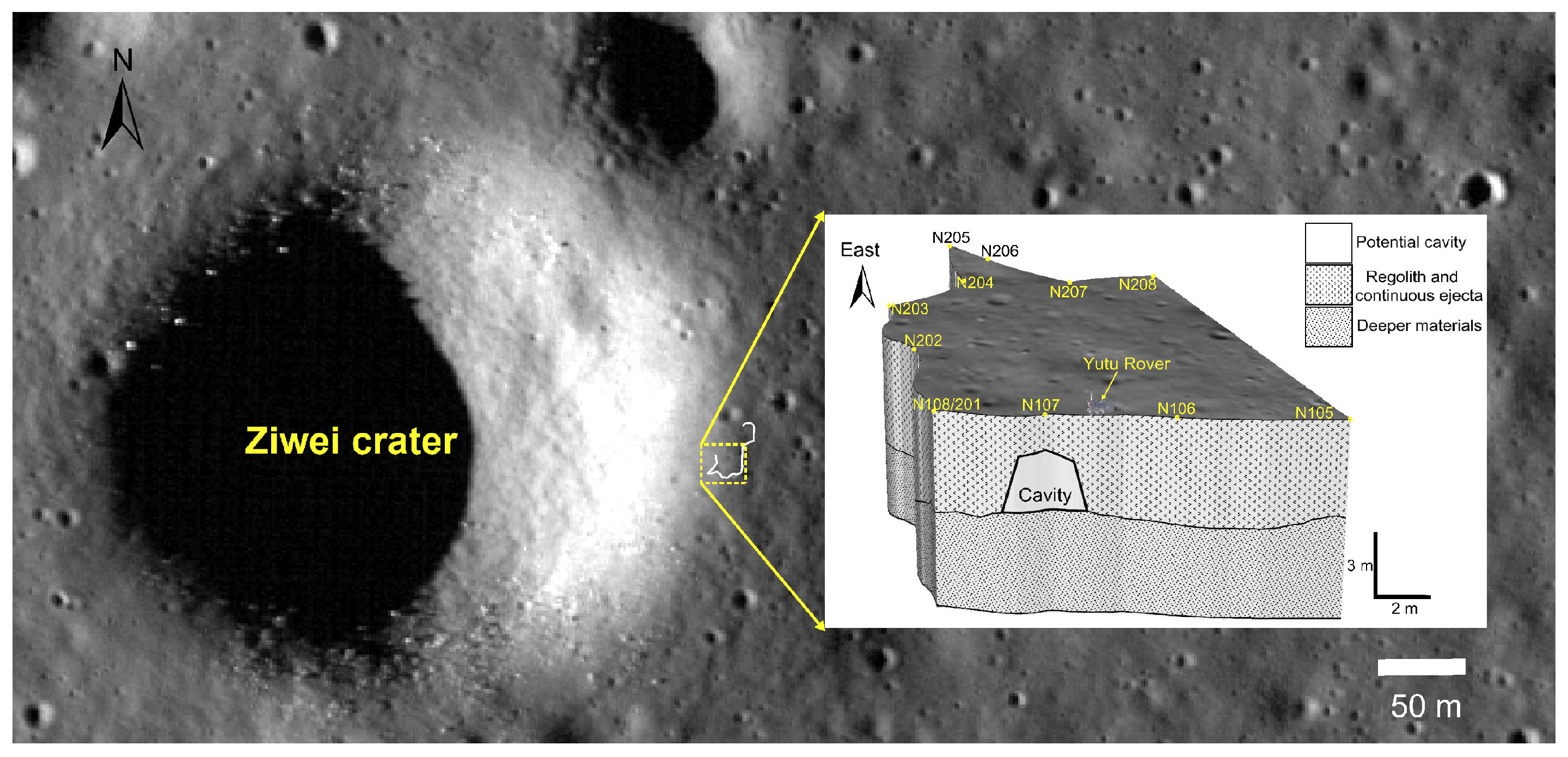
4.3. Subsurface Cavity Detection
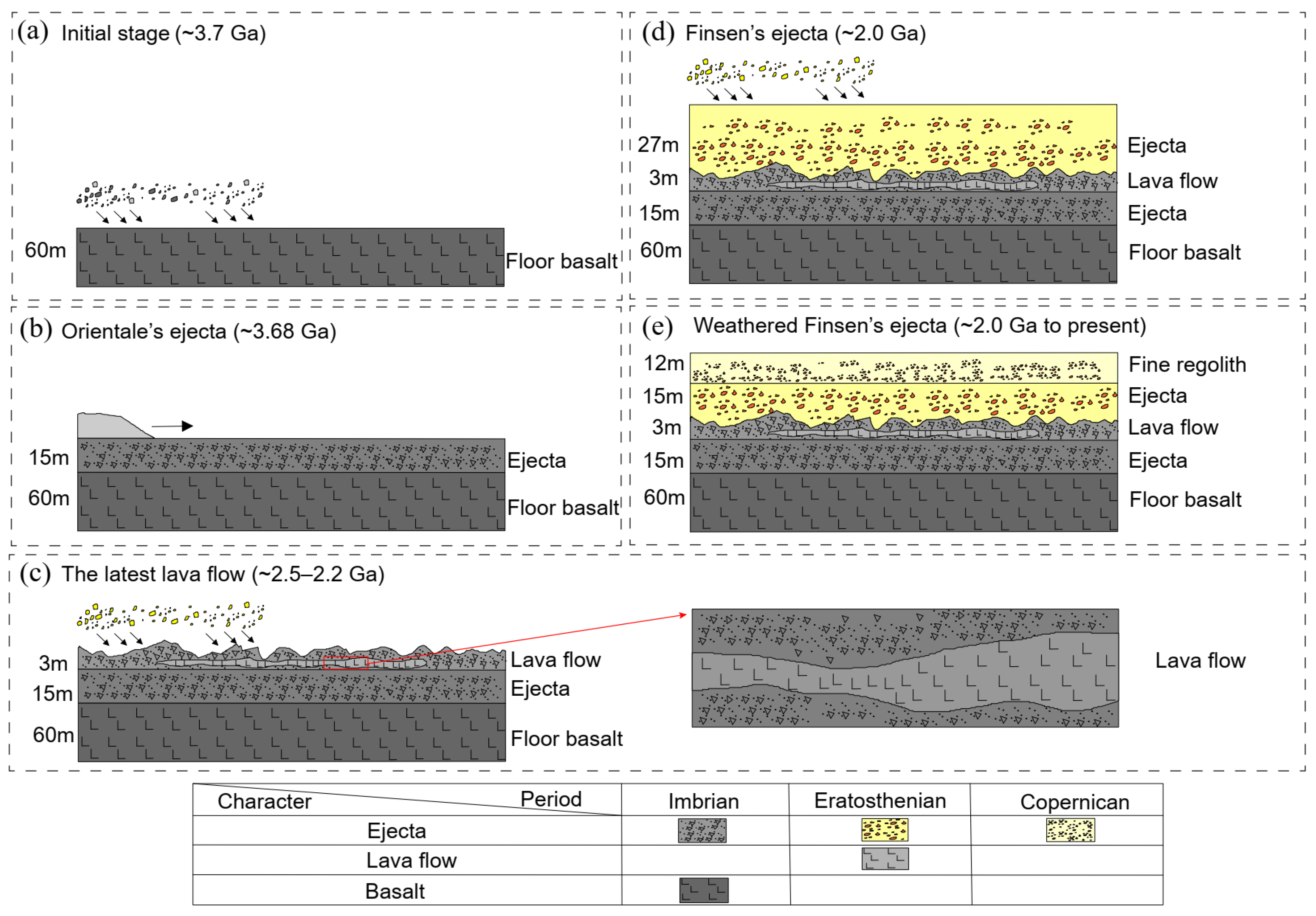
4.4. Volcanic Activity Revealed by High-Frequency LPR at the CE-4 Landing Site
5. Summary and Future Observation Prospect of Yutu-2 Radar
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ouyang, Z.; Zhou, Y.; Li, C.; Liu, J. The prospect of exploitation and utilization of some lunar resources. Earth Sci. 2002, 27, 498–503. [Google Scholar]
- Ding, C.; Feng, J.; Zheng, L.; Dai, S.; Xing, S.; Xiao, Y.; Su, Y. A review of applications of radar-detection techniques in lunar explorations. Astron. Res. Technol.-Publ. Natl. Astron. Obs. China 2015, 12, 228–242. [Google Scholar]
- Li, C.; Liu, J.; Ren, X.; Zuo, W.; Tan, X.; Wen, W.; Li, H.; Mu, L.; Su, Y.; Zhang, H.; et al. The Chang’e 3 mission overview. Space Sci. Rev. 2015, 190, 85–101. [Google Scholar] [CrossRef]
- Foster, R.G.; Roenneberg, T. Human responses to the geophysical daily, annual and lunar cycles. Curr. Biol. 2008, 18, R784–R794. [Google Scholar] [CrossRef]
- Dickson, P. Sputnik: The Shock of the Century; Bloomsbury Publishing USA: New York, NY, USA, 2001. [Google Scholar]
- Ouyang, Z. Introduction to Lunar Science; China Aerospace Press: Beijing, China, 2005; pp. 151–251. [Google Scholar]
- Wu, W.; Yu, D.; Wang, C.; Liu, J.; Tang, Y.; Zhang, H.; Zhang, Z. Technological breakthroughs and scientific progress of the Chang’e-4 mission. Sci. China Inf. Sci. 2020, 63, 1–14. [Google Scholar] [CrossRef]
- Li, C.; Su, Y.; Pettinelli, E.; Xing, S.; Ding, C.; Liu, J.; Ren, X.; Lauro, S.E.; Soldovieri, F.; Zeng, X.; et al. The Moon’s farside shallow subsurface structure unveiled by Chang’E-4 Lunar Penetrating Radar. Sci. Adv. 2020, 6, eaay6898. [Google Scholar] [CrossRef]
- Li, C.; Zuo, W.; Wen, W.; Zeng, X.; Gao, X.; Liu, Y.; Fu, Q.; Zhang, Z.; Su, Y.; Ren, X.; et al. Overview of the Chang’e-4 mission: Opening the frontier of scientific exploration of the lunar far side. Space Sci. Rev. 2021, 217, 1–32. [Google Scholar] [CrossRef]
- Ding, L.; Zhou, R.; Yuan, Y.; Yang, H.; Li, J.; Yu, T.; Liu, C.; Wang, J.; Li, S.; Gao, H.; et al. A 2-year locomotive exploration and scientific investigation of the lunar farside by the Yutu-2 rover. Sci. Robot. 2022, 7, eabj6660. [Google Scholar] [CrossRef] [PubMed]
- Jia, Y.; Zou, Y.; Ping, J.; Xue, C.; Yan, J.; Ning, Y. The scientific objectives and payloads of Chang’E- 4 mission. Planet. Space Sci. 2018, 162, 207–215. [Google Scholar] [CrossRef]
- Ling, Z.; Qiao, L.; Liu, C.; Cao, H.; Bi, X.; Lu, X.; Zhang, J.; Fu, X.; Li, B.; Liu, J. Composition, mineralogy and chronology of mare basalts and non-mare materials in Von Kármán crater: Landing site of the Chang’E- 4 mission. Planet. Space Sci. 2019, 179, 104741. [Google Scholar] [CrossRef]
- Fang, G.Y.; Zhou, B.; Ji, Y.C.; Zhang, Q.Y.; Shen, S.X.; Li, Y.X.; Guan, H.F.; Tang, C.J.; Gao, Y.Z.; Lu, W.; et al. Lunar Penetrating Radar onboard the Chang’e-3 mission. Res. Astron. Astrophys. 2014, 14, 1607. [Google Scholar] [CrossRef]
- Su, Y.; Fang, G.Y.; Feng, J.Q.; Xing, S.G.; Ji, Y.C.; Zhou, B.; Gao, Y.Z.; Li, H.; Dai, S.; Xiao, Y.; et al. Data processing and initial results of Chang’e-3 lunar penetrating radar. Res. Astron. Astrophys. 2014, 14, 1623. [Google Scholar] [CrossRef]
- Ding, C.; Li, J.; Hu, R. Moon-based Ground Penetrating Radar Observation of the Latest Volcanic Activity at the Chang’E-4 Landing Site. IEEE Trans. Geosci. Remote Sens. 2023, 61, 4600410. [Google Scholar] [CrossRef]
- Lauro, S.E.; Pettinelli, E.; Caprarelli, G.; Guallini, L.; Rossi, A.P.; Mattei, E.; Cosciotti, B.; Cicchetti, A.; Soldovieri, F.; Cartacci, M.; et al. Multiple subglacial water bodies below the south pole of Mars unveiled by new MARSIS data. Nat. Astron. 2021, 5, 63–70. [Google Scholar] [CrossRef]
- Orosei, R.; Ding, C.; Fa, W.; Giannopoulos, A.; Hérique, A.; Kofman, W.; Lauro, S.E.; Li, C.; Pettinelli, E.; Su, Y.; et al. The global search for liquid water on Mars from orbit: Current and future perspectives. Life 2020, 10, 120. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.B.; Zheng, L.; Su, Y.; Fang, G.Y.; Zhou, B.; Feng, J.Q.; Xing, S.G.; Dai, S.; Li, J.D.; Ji, Y.C.; et al. Performance evaluation of lunar penetrating radar onboard the rover of CE-3 probe based on results from ground experiments. Res. Astron. Astrophys. 2014, 14, 1633. [Google Scholar] [CrossRef]
- Di, K.; Liu, Z.; Liu, B.; Wan, W.; Peng, M.; Wang, Y.; Gou, S.; Yue, Z.; Xin, X.; Jia, M.; et al. Chang’e-4 lander localization based on multi-source data. J. Remote Sens. 2019, 23, 177–184. [Google Scholar]
- Ding, C.; Xiao, Z.; Wu, B.; Li, Y.; Prieur, N.C.; Cai, Y.; Su, Y.; Cui, J. Fragments delivered by secondary craters at the Chang’E-4 landing site. Geophys. Res. Lett. 2020, 47, e2020GL087361. [Google Scholar] [CrossRef]
- Wu, B.; Li, F.; Hu, H.; Zhao, Y.; Wang, Y.; Xiao, P.; Li, Y.; Liu, W.C.; Chen, L.; Ge, X.; et al. Topographic and geomorphological mapping and analysis of the Chang’E-4 landing site on the far side of the Moon. Photogramm. Eng. Remote Sens. 2020, 86, 247–258. [Google Scholar] [CrossRef]
- Tartèse, R.; Anand, M.; Gattacceca, J.; Joy, K.H.; Mortimer, J.I.; Pernet-Fisher, J.F.; Russell, S.; Snape, J.F.; Weiss, B.P. Constraining the evolutionary history of the Moon and the inner solar system: A case for new returned lunar samples. Space Sci. Rev. 2019, 215, 54. [Google Scholar] [CrossRef]
- Li, S.; Lucey, P.G.; Milliken, R.E.; Hayne, P.O.; Fisher, E.; Williams, J.P.; Hurley, D.M.; Elphic, R.C. Direct evidence of surface exposed water ice in the lunar polar regions. Proc. Natl. Acad. Sci. USA 2018, 115, 8907–8912. [Google Scholar] [CrossRef]
- Robinson, K.L.; Taylor, G.J. Heterogeneous distribution of water in the Moon. Nat. Geosci. 2014, 7, 401–408. [Google Scholar] [CrossRef]
- Hagerty, J.J.; Lawrence, D.; Hawke, B. Thorium abundances of basalt ponds in South Pole-Aitken basin: Insights into the composition and evolution of the far side lunar mantle. J. Geophys. Res. Planets 2011, 116, E0600. [Google Scholar] [CrossRef]
- Li, C.; Liu, D.; Liu, B.; Ren, X.; Liu, J.; He, Z.; Zuo, W.; Zeng, X.; Xu, R.; Tan, X.; et al. Chang’E-4 initial spectroscopic identification of lunar far-side mantle-derived materials. Nature 2019, 569, 378–382. [Google Scholar] [CrossRef] [PubMed]
- Feng, Y.; Chen, S.; Tong, X.; Wang, C.; Li, P.; Xi, M.; Xiao, C. Exploring the Lunar Regolith’s Thickness and Dielectric Properties Using Band-Limited Impedance at Chang’E-4 Landing Site. J. Geophys. Res. Planets 2023, 128, e2022JE007540. [Google Scholar] [CrossRef]
- Ding, C.; Li, C.; Xiao, Z.; Su, Y.; Xing, S.; Wang, Y.; Feng, J.; Dai, S.; Xiao, Y.; Yao, M. Layering structures in the porous material beneath the Chang’e-3 landing site. Earth Space Sci. 2020, 7, e2019EA000862. [Google Scholar] [CrossRef]
- Feng, J.; Su, Y.; Ding, C.; Xing, S.; Dai, S.; Zou, Y. Dielectric properties estimation of the lunar regolith at CE-3 landing site using lunar penetrating radar data. Icarus 2017, 284, 424–430. [Google Scholar] [CrossRef]
- Xiao, Z.; Ding, C.; Xie, M.; Cai, Y.; Cui, J.; Zhang, K.; Wang, J. Ejecta from the Orientale basin at the Chang’E-4 landing site. Geophys. Res. Lett. 2021, 48, e2020GL090935. [Google Scholar] [CrossRef]
- Quaide, W.L.; Oberbeck, V.R. Thickness determinations of the lunar surface layer from lunar impact craters. J. Geophys. Res. 1968, 73, 5247–5270. [Google Scholar] [CrossRef]
- Yuan, Y.; Zhu, P.; Xiao, L.; Huang, J.; Garnero, E.J.; Deng, J.; Wang, F.; Qian, Y.; Zhao, N.; Wang, W.; et al. Intermittent volcanic activity detected in the Von Kármán crater on the farside of the Moon. Earth Planet. Sci. Lett. 2021, 569, 117062. [Google Scholar] [CrossRef]
- Qiao, L.; Ling, Z.; Fu, X.; Li, B. Geological characterization of the Chang’e-4 landing area on the lunar farside. Icarus 2019, 333, 37–51. [Google Scholar] [CrossRef]
- Giannakis, I.; Zhou, F.; Warren, C.; Giannopoulos, A. Inferring the shallow layered structure at the Chang’E-4 landing site: A novel interpretation approach using lunar penetrating radar. Geophys. Res. Lett. 2021, 48, e2021GL092866. [Google Scholar] [CrossRef]
- Lu, Y.; Wu, Y.; Michael, G.G.; Ma, J.; Cai, W.; Qin, N. Chronological sequence of Chang’E-4 landing zone within Von Kármán crater. Icarus 2021, 354, 114086. [Google Scholar] [CrossRef]
- Huang, J.; Xiao, Z.; Flahaut, J.; Martinot, M.; Head, J.; Xiao, X.; Xie, M.; Xiao, L. Geological characteristics of Von Kármán crater, northwestern south pole-Aitken Basin: Chang’E-4 landing site region. J. Geophys. Res. Planets 2018, 123, 1684–1700. [Google Scholar] [CrossRef]
- Zhang, J.; Zhou, B.; Lin, Y.; Zhu, M.H.; Song, H.; Dong, Z.; Gao, Y.; Di, K.; Yang, W.; Lin, H.; et al. Lunar regolith and substructure at Chang’E-4 landing site in South Pole–Aitken basin. Nat. Astron. 2021, 5, 25–30. [Google Scholar] [CrossRef]
- Losiak, A.; Wilhelms, D.; Byrne, C.; Thaisen, K.; Weider, S.; Kohout, T.; O’Sullivan, K.; Kring, D. A new lunar impact crater database. In Proceedings of the 40th Annual Lunar and Planetary Science Conference, The Woodlands, TX, USA, 23–27 March 2009; p. 1532. [Google Scholar]
- Wilhelms, D.E.; McCauley, J.F.; Trask, N.J. The Geologic History of the Moon; Technical Report; U.S. Geological Survey Publications Warehouse: Reston, VA, USA, 1987.
- Pasckert, J.H.; Hiesinger, H.; van der Bogert, C.H. Lunar farside volcanism in and around the South Pole–Aitken basin. Icarus 2018, 299, 538–562. [Google Scholar] [CrossRef]
- Melosh, H.J. Impact Cratering: A Geologic Process; Oxford University Press: New York, NY, USA; Clarendon Press: Oxford, UK, 1989. [Google Scholar]
- Yingst, R.; Chuang, F.; Berman, D.; Mest, S. Geologic mapping of the Planck Quadrangle of the Moon (LQ-29). In Proceedings of the 48th Annual Lunar and Planetary Science Conference, The Woodlands, TX, USA, 20–24 March 2017; p. 1680. [Google Scholar]
- Chang, Y.; Xiao, Z.; Wang, Y.; Ding, C.; Cui, J.; Cai, Y. An updated constraint on the local stratigraphy at the Chang’E-4 landing site. Earth Planet. Phys. 2021, 5, 19–31. [Google Scholar] [CrossRef]
- Zhao, N.; Zhu, P.; Yang, K.; Yuan, Y.; Guo, S. The preliminary processing and analysis of LPR Channel-2B data from Chang’E-3. Sci. China Phys. Mech. Astron. 2014, 57, 2346–2353. [Google Scholar] [CrossRef]
- Baker, V. Planetary geomorphology: Some historical/analytical perspectives. Geomorphology 2015, 240, 8–17. [Google Scholar] [CrossRef]
- Zhang, L.; Li, J.; Zeng, Z.; Xu, Y.; Liu, C.; Chen, S. Stratigraphy of the Von Kármán Crater Based on Chang’E-4 Lunar Penetrating Radar Data. Geophys. Res. Lett. 2020, 47, e2020GL088680. [Google Scholar] [CrossRef]
- Lai, J.; Xu, Y.; Zhang, X.; Xiao, L.; Yan, Q.; Meng, X.; Zhou, B.; Dong, Z.; Zhao, D. Comparison of dielectric properties and structure of lunar regolith at Chang’e-3 and Chang’e-4 landing sites revealed by ground-penetrating radar. Geophys. Res. Lett. 2019, 46, 12783–12793. [Google Scholar] [CrossRef]
- Lai, J.; Xu, Y.; Bugiolacchi, R.; Meng, X.; Xiao, L.; Xie, M.; Liu, B.; Di, K.; Zhang, X.; Zhou, B.; et al. First look by the Yutu-2 rover at the deep subsurface structure at the lunar farside. Nat. Commun. 2020, 11, 3426. [Google Scholar] [CrossRef]
- Feng, J.; Siegler, M.A.; Su, Y.; Ding, C.; Giannakis, I. Layered Structures in the Upper Several Hundred Meters of the Moon Along the Chang’E-4 Rover’s First 1000-m Traverse. J. Geophys. Res. Planets 2023, 128, e2022JE007714. [Google Scholar] [CrossRef]
- Cao, H.; Xu, Y.; Xu, L.; Zhang, L.; Bugiolacchi, R.; Zhang, F. From Schrödinger to Von Kármán: An Intriguing New Geological Structure Revealed by the Chang’e-4 Lunar Penetrating Radar. Geophys. Res. Lett. 2023, 50, e2022GL101413. [Google Scholar] [CrossRef]
- Ivanov, M.; Hiesinger, H.; Van Der Bogert, C.; Orgel, C.; Pasckert, J.; Head, J. Geologic history of the northern portion of the South Pole-Aitken basin on the Moon. J. Geophys. Res. Planets 2018, 123, 2585–2612. [Google Scholar] [CrossRef]
- Du, J.; Fa, W.; Wieczorek, M.A.; Xie, M.; Cai, Y.; Zhu, M.H. Thickness of lunar mare basalts: New results based on modeling the degradation of partially buried craters. J. Geophys. Res. Planets 2019, 124, 2430–2459. [Google Scholar] [CrossRef]
- Stuartz, A. Geologic Map of the Central Far Side of the Moon; U.S. Geological Survey Publications Warehouse: Reston, VA, USA, 1978.
- Fu, X.H.; Qiao, L.; Zhang, J.; Ling, Z.C.; Li, B. The subsurface structure and stratigraphy of the Chang’E-4 landing site: Orbital evidence from small craters on the Von Kármán crater floor. Res. Astron. Astrophys. 2020, 20, 008. [Google Scholar] [CrossRef]
- Pettinelli, E.; Lauro, S.E.; Mattei, E.; Cosciotti, B.; Soldovieri, F. Stratigraphy versus artefacts in the Chang’e-4 low-frequency radar. Nat. Astron. 2021, 5, 890–893. [Google Scholar] [CrossRef]
- Zhang, J.; Zhou, B.; Lin, Y. Reply to: Stratigraphy versus artefacts in the Chang’e-4 low-frequency radar. Nat. Astron. 2021, 5, 894–897. [Google Scholar] [CrossRef]
- Li, C.; Xing, S.; Lauro, S.E.; Su, Y.; Dai, S.; Feng, J.; Cosciotti, B.; Di Paolo, F.; Mattei, E.; Xiao, Y.; et al. Pitfalls in GPR data interpretation: False reflectors detected in lunar radar cross sections by Chang’e-3. IEEE Trans. Geosci. Remote Sens. 2017, 56, 1325–1335. [Google Scholar] [CrossRef]
- Xing, S.; Su, Y. Simulation of lunar soil relative dielectric constant inversion method based on lunar radar mechanism. Astron. Res. Technol. 2015, 12, 306–311. [Google Scholar]
- Zhang, L.; Zeng, Z.; Li, J.; Huang, L.; Huo, Z.; Wang, K.; Zhang, J. Parameter Estimation of Lunar Regolith from Lunar Penetrating Radar Data. Sensors 2018, 18, 2907. [Google Scholar] [CrossRef] [PubMed]
- Ding, C.; Xiao, Z.; Su, Y.; Zhao, J.; Cui, J. Compositional variations along the route of Chang’e-3 Yutu rover revealed by the lunar penetrating radar. Prog. Earth Planet. Sci. 2020, 7, 32. [Google Scholar] [CrossRef]
- Ding, C.; Xiao, Z.; Wu, B.; Li, Z.; Su, Y.; Zhou, B.; Liu, K.; Cui, J. Rock Fragments in Shallow Lunar Regolith: Constraints by the Lunar Penetrating Radar Onboard the Chang’E-4 Mission. J. Geophys. Res. Planets 2021, 126, e2021JE006917. [Google Scholar] [CrossRef]
- Dong, Z.; Fang, G.; Zhao, D.; Zhou, B.; Gao, Y.; Ji, Y. Dielectric properties of lunar subsurface materials. Geophys. Res. Lett. 2020, 47, e2020GL089264. [Google Scholar] [CrossRef]
- Fa, W. Bulk Density of the Lunar Regolith at the Chang’E-3 Landing Site as Estimated From Lunar Penetrating Radar. Earth Space Sci. 2020, 7, e2019EA000801. [Google Scholar] [CrossRef]
- Daniels, D.J. Ground Penetrating Radar; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2004; Volume 1. [Google Scholar]
- Ristic, A.V.; Petrovacki, D.; Govedarica, M. A new method to simultaneously estimate the radius of a cylindrical object and the wave propagation velocity from GPR data. Comput. Geosci. 2009, 35, 1620–1630. [Google Scholar] [CrossRef]
- Jol, H.M. Ground Penetrating Radar Theory and Applications; Elsevier: Amsterdam, The Netherlands, 2008. [Google Scholar]
- Shihab, S.; Al-Nuaimy, W. Radius estimation for cylindrical objects detected by ground penetrating radar. Subsurf. Sens. Technol. Appl. 2005, 6, 151–166. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Moore, R.K.; Fung, A.K. Microwave Remote Sensing: Active and Passive. Volume 3-From Theory to Applications; Artech House Inc.: Norwood, MA, USA, 1986. [Google Scholar]
- Houston, W.; Mitchell, J.; Carrier, W., III. Lunar soil density and porosity. In Proceedings of the 5th Lunar Science Conference, Houston, TX, USA, 18–22 March 1974; Proceedings (A75-39540 19-91). Pergamon Press, Inc.: New York, NY, USA, 1974; Volume 5, pp. 2361–2364. [Google Scholar]
- Carrier, W.; Olhoeft, G.R.; Mendell, W. Physical Properties of the Lunar Surface. In Lunar Sourcebook, A User’s Guide to the Moon; Cambridge University Press: Cambridge, UK, 1991; pp. 475–594. [Google Scholar]
- Mitchell, J.; Houston, W.; Scott, R.; Costes, N.; Carrier, W., III; Bromwell, L. Mechanical properties of lunar soil: Density, porosity, cohesion and angle of internal friction. In Proceedings of the Lunar Science Conference, Houston, TX, USA, 10–13 January 1972; Volume 3, p. 3235. [Google Scholar]
- Wang, R.; Su, Y.; Ding, C.; Dai, S.; Liu, C.; Zhang, Z.; Hong, T.; Zhang, Q.; Li, C. A novel approach for permittivity estimation of lunar regolith using the lunar penetrating radar onboard Chang’E-4 rover. Remote Sens. 2021, 13, 3679. [Google Scholar] [CrossRef]
- Ding, C.; Xiao, Z.; Su, Y.; Cui, J. Hyperbolic reflectors determined from peak echoes of ground penetrating radar. Icarus 2021, 358, 114280. [Google Scholar] [CrossRef]
- Chen, R.; Xu, Y.; Xie, M.; Zhang, L.; Niu, S.; Bugiolacchi, R. Sub-surface stratification and dielectric permittivity distribution at the Chang’E-4 landing site revealed by the lunar penetrating radar. Astron. Astrophys. 2022, 664, A35. [Google Scholar] [CrossRef]
- Lv, W.; Zhang, J. High-resolution permittivity estimation of ground penetrating radar data by migration with isolated hyperbolic diffractions and local focusing analyses. Front. Astron. Space Sci. 2023, 10, 1188232. [Google Scholar] [CrossRef]
- Li, Q.; Yan, D.; Wu, W. Remote sensing image scene classification based on global self-attention module. Remote Sens. 2021, 13, 4542. [Google Scholar] [CrossRef]
- Dong, Z.; Feng, X.; Zhou, H.; Liu, C.; Zeng, Z.; Li, J.; Liang, W. Properties analysis of lunar regolith at Chang’E-4 landing site based on 3D velocity spectrum of lunar penetrating radar. Remote Sens. 2020, 12, 629. [Google Scholar] [CrossRef]
- Grimm, R.E.; Heggy, E.; Clifford, S.; Dinwiddie, C.; McGinnis, R.; Farrell, D. Absorption and scattering in ground-penetrating radar: Analysis of the Bishop Tuff. J. Geophys. Res. Planets 2006, 111, E06S02. [Google Scholar] [CrossRef]
- Strangway, D.; Pearce, G.; Olhoeft, G. Properties of Lunar Samples. In Proceedings of the The Soviet-American Conference on Cosmochemistry of the Moon and Planets, Moscow, Russia, 4–8 June 1974; Scientific and Technical Information Office, National Aeronautics and Space Administration: Washington, DC, USA, 1977; Volume 370, p. 417. [Google Scholar]
- Skolnik, M.I. Introduction to Radar Systems; McGraw Hill: New York, NY, USA, 1980. [Google Scholar]
- Lai, J.; Cui, F.; Xu, Y.; Liu, C.; Zhang, L. Dielectric properties of lunar materials at the Chang’e-4 landing site. Remote Sens. 2021, 13, 4056. [Google Scholar] [CrossRef]
- Quan, Y.; Harris, J.M. Seismic attenuation tomography using the frequency shift method. Geophysics 1997, 62, 895–905. [Google Scholar] [CrossRef]
- Irving, J.D.; Knight, R.J. Removal of wavelet dispersion from ground-penetrating radar data. Geophysics 2003, 68, 960–970. [Google Scholar] [CrossRef]
- Lauro, S.; Mattei, E.; Cosciotti, B.; Di Paolo, F.; Arcone, S.; Viccaro, M.; Pettinelli, E. Electromagnetic signal penetration in a planetary soil simulant: Estimated attenuation rates using GPR and TDR in volcanic deposits on Mount Etna. J. Geophys. Res. Planets 2017, 122, 1392–1404. [Google Scholar] [CrossRef]
- Turner, G.; Siggins, A.F. Constant Q attenuation of subsurface radar pulses. Geophysics 1994, 59, 1192–1200. [Google Scholar] [CrossRef]
- Liu, L.; Lane, J.W.; Quan, Y. Radar attenuation tomography using the centroid frequency downshift method. J. Appl. Geophys. 1998, 40, 105–116. [Google Scholar] [CrossRef]
- Zhang, C.; Ulrych, T.J. Estimation of quality factors from CMP records. Geophysics 2002, 67, 1542–1547. [Google Scholar] [CrossRef]
- Xing, S.G.; Su, Y.; Feng, J.Q.; Dai, S.; Xiao, Y.; Ding, C.Y.; Li, C.L. The penetrating depth analysis of Lunar Penetrating Radar onboard Chang’e-3 rover. Res. Astron. Astrophys. 2017, 17, 046. [Google Scholar] [CrossRef]
- Xiao, L.; Zhu, P.; Fang, G.; Xiao, Z.; Zou, Y.; Zhao, J.; Zhao, N.; Yuan, Y.; Qiao, L.; Zhang, X.; et al. A young multilayered terrane of the northern Mare Imbrium revealed by Chang’E-3 mission. Science 2015, 347, 1226–1229. [Google Scholar] [CrossRef] [PubMed]
- McKay, D.S.; Heiken, G.; Basu, A.; Blanford, G.; Simon, S.; Reedy, R.; French, B.M.; Papike, J. The lunar regolith. Lunar Sourceb. 1991, 567, 285–356. [Google Scholar]
- Solomon, S.C.; Comer, R.P.; Head, J.W. The evolution of impact basins: Viscous relaxation of topographic relief. J. Geophys. Res. Solid Earth 1982, 87, 3975–3992. [Google Scholar] [CrossRef]
- Wu, W.; Li, C.; Zuo, W.; Zhang, H.; Liu, J.; Wen, W.; Su, Y.; Ren, X.; Yan, J.; Yu, D.; et al. Lunar farside to be explored by Chang’e-4. Nat. Geosci. 2019, 12, 222–223. [Google Scholar] [CrossRef]
- Lin, H.; He, Z.; Yang, W.; Lin, Y.; Xu, R.; Zhang, C.; Zhu, M.H.; Chang, R.; Zhang, J.; Li, C.; et al. Olivine-norite rock detected by the lunar rover Yutu-2 likely crystallized from the SPA-impact melt pool. Natl. Sci. Rev. 2020, 7, 913–920. [Google Scholar] [CrossRef]
- Lin, H.; Lin, Y.; Yang, W.; He, Z.; Hu, S.; Wei, Y.; Xu, R.; Zhang, J.; Liu, X.; Yang, J.; et al. New insight into lunar regolith-forming processes by the lunar rover Yutu-2. Geophys. Res. Lett. 2020, 47, e2020GL087949. [Google Scholar] [CrossRef]
- Zhang, L.; Xu, Y.; Bugiolacchi, R.; Hu, B.; Liu, C.; Lai, J.; Zeng, Z.; Huo, Z. Rock abundance and evolution of the shallow stratum on Chang’e-4 landing site unveiled by lunar penetrating radar data. Earth Planet. Sci. Lett. 2021, 564, 116912. [Google Scholar] [CrossRef]
- Zhou, H.; Feng, X.; Ding, C.; Dong, Z.; Liu, C.; Zhang, Y.; Meng, Z. Yutu-2 radar sounding evidence of a buried crater at Chang’E-4 landing site. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–19. [Google Scholar] [CrossRef]
- Di, K.; Zhu, M.H.; Yue, Z.; Lin, Y.; Wan, W.; Liu, Z.; Gou, S.; Liu, B.; Peng, M.; Wang, Y.; et al. Topographic evolution of Von Kármán crater revealed by the lunar rover Yutu-2. Geophys. Res. Lett. 2019, 46, 12764–12770. [Google Scholar] [CrossRef]
- Li, Q.L.; Zhou, Q.; Liu, Y.; Xiao, Z.; Lin, Y.; Li, J.H.; Ma, H.X.; Tang, G.Q.; Guo, S.; Tang, X.; et al. Two-billion-year-old volcanism on the Moon from Chang’e-5 basalts. Nature 2021, 600, 54–58. [Google Scholar] [CrossRef] [PubMed]
- Head, J.W., III. Lunar volcanism in space and time. Rev. Geophys. 1976, 14, 265–300. [Google Scholar] [CrossRef]
- Head, J.; Adams, J.; McCord, T.; Pieters, C.; Zisk, S. Regional stratigraphy and geologic history of Mare Crisium. In Proceedings of the Mare Crisium: The View from Luna 24, Houston, TX, USA, 1–3 December 1977; pp. 43–74. [Google Scholar]
- Sauro, F.; Pozzobon, R.; Massironi, M.; De Berardinis, P.; Santagata, T.; De Waele, J. Lava tubes on Earth, Moon and Mars: A review on their size and morphology revealed by comparative planetology. Earth-Sci. Rev. 2020, 209, 103288. [Google Scholar] [CrossRef]
- Horz, F. Lava tubes-potential shelters for habitats. In Lunar Bases and Space Activities of the 21st Century; Lunar and Planetary Institute: Houston, TX, USA, 1985; pp. 405–412. [Google Scholar]
- Qiu, X.; Ding, C. Radar Observation of the Lava Tubes on the Moon and Mars. Remote Sens. 2023, 15, 2850. [Google Scholar] [CrossRef]
- Ding, C.; Xiao, Z.; Su, Y. A potential subsurface cavity in the continuous ejecta deposits of the Ziwei crater discovered by the Chang’E-3 mission. Earth Planets Space 2021, 73, 1–12. [Google Scholar] [CrossRef]
- Ding, C.; Liu, K.; Huang, S.; Su, Y.; Li, J. Application of microwave radar in Chang’e lunar exploration project. Acta Geol. Sin. 2021, 95, 2805–2822. [Google Scholar]
- Wilhelms, D.E.; Howard, K.A.; Wilshire, H.G. Geologic Map of the South Side of the Moon; Department of the Interior, US Geological Survey: Reston, VA, USA, 1979.










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lei, Z.; Ding, C. Yutu-2 Radar Observations at the Chang’E-4 Landing Site: The Shallow Geological Structure and Its Dielectric Properties. Universe 2023, 9, 461. https://doi.org/10.3390/universe9110461
Lei Z, Ding C. Yutu-2 Radar Observations at the Chang’E-4 Landing Site: The Shallow Geological Structure and Its Dielectric Properties. Universe. 2023; 9(11):461. https://doi.org/10.3390/universe9110461
Chicago/Turabian StyleLei, Zhonghan, and Chunyu Ding. 2023. "Yutu-2 Radar Observations at the Chang’E-4 Landing Site: The Shallow Geological Structure and Its Dielectric Properties" Universe 9, no. 11: 461. https://doi.org/10.3390/universe9110461