1. Introduction
The ever-growing requirements regarding the quality of production and the efficiency and reliability of industrial equipment make modern industrial systems increasingly complex. Therefore, there is a growing interest in the reliability and diagnostics of the state and failure forecasting for these systems.
Electric machines, in particular induction motors (IM), play an important role in the industry due to their widespread use in propulsion systems. For this reason, the requirements for their reliable and safe operation are constantly increasing [
1].
It should be noted that damages to the electric windings of the stator and rotor of an induction motor constitute nearly 50% of all damages encountered in practice [
1,
2]. Their special feature, especially in the case of failure of the stator windings (~38%), is the avalanche propagation—from short circuits in single turns, through phase short circuits to earth faults, resulting in total machine damage and drive system downtime (and frequently the entire production line). Therefore, the timely detection of the incipient winding damage is an extremely important issue from a technical point of view.
Analytical methods of fault detection require a thorough knowledge of the tested object. The role of humans as experts results in extended analysis time, as well as a lack of automation of the detection process. In order to limit the role of these human experts in fully automated diagnostic systems, artificial intelligence (AI) methods, in particular artificial neural networks (ANN), are increasingly used. Additionally, diagnostics systems for electric machines using neural networks (NN) are currently being widely developed by many scientific centers. The main task of neural structures is the full automation of the technical condition assessment process of an electric motor. Neural networks provide diagnostic information as a response to a given input vector and often complement analytical fault detection methods. Among the neural structures most often used in the diagnostics of electrical machines, the following deserve special attention:
- -
multilayer perceptron (MLP),
- -
self-organizing Kohonen maps (SOM),
- -
networks with radial activation functions (RBF),
- -
recursive neural networks (RNN),
- -
wavelet neural networks (WNN).
The most frequently used neural structure in the IM diagnostic processes is the multilayer perceptron (MLP). This is due to its simple mathematical description, and thus easy hardware implementation. However, to ensure proper damage detection, the correct selection of the NN structure [
3,
4,
5,
6], teaching method [
7,
8], activation function [
8], and network input vector [
9] is required. In most MLP network applications in IM diagnostic systems, the network training process is carried out according to the Levenberg–Marquardt (L-M) algorithm [
3,
8,
9] or the backward propagation algorithm (BP) [
4,
6,
8,
10]. Despite the simple structure of the MLP network, it has a relatively long learning time. In [
8], the influence of the teaching method on the detection efficiency of IM electric and mechanical faults was presented. The authors showed the possibility of using principal component analysis (PCA) to reduce the number of neural connections in MLP networks. Ensuring that the optimal network structure is associated with the appropriate selection of the number of neurons in each of the hidden layers. An analytical approach to structure optimization was used in [
4]. The authors presented the effectiveness of selecting the number of hidden layer neurons based on the sizes of the input and output vectors. In [
5], the possibility of using a genetic algorithm (GA) to select the appropriate number of neurons in individual layers was presented. Properly selected activation functions [
8] and elements of the input vector [
6,
9] can ensure high detection efficiency with a short time required for network training. In [
9], the authors presented the use of network information as an input vector from various diagnostic signal analyses. The approach used in [
9] resulted in a significant improvement in the efficiency of the neural detector of motor damage.
Damage classifiers also play a very important role in diagnostic processes. The main representative of neural damage classifiers is the Kohonen self-organizing network (SOM). Possible applications of the SOM in the detection and classification of IM faults are presented in [
8,
11,
12,
13,
14,
15,
16], among others. The undoubted advantage of the Kohonen network is the relatively small size of the training vector required to ensure a high efficiency level. SOM is characterized by its simple mathematical description, as well as the short time of the training process, which resulted in the creation of numerous variations of this structure. As in the case of the MLP, the efficiency of the SOM network in IM fault classification is strongly dependent on the structure used. The impacts of the SOM network topology, neighborhood function, as well as the scope of neighborhood, are discussed in [
8,
16]. In [
12], the influence of the number of neurons in the network output layer on the classification effectiveness of electrical rotor faults in IM using SOM was presented.
In addition to the basic MLP and SOM structures discussed here, there is a great deal of interest in the literature on neural networks with radial basis functions (RBF) [
17,
18,
19,
20]. The main difference between MLP and RBF is the activation function used in the hidden layer. This difference influences the task of the NN network. In the case of MLP, this is the approximation of the analyzed function, while RBF performs a local approximation, taking into account the cluster of data around the central point. In [
18], the authors demonstrated the superiority of the RBF network over MLP in the process of detecting damage to IM electrical circuits. The comparison of the two structures was possible due to the use of the same number of neurons in individual layers, as well as the same learning and testing vector.
Recursive neural networks (RNNs) are also used in diagnostic processes. A characteristic feature of these networks is the presence of feedback loops in their structure. The primary representatives of recursive networks used in the IM diagnostics are the Elman network (ENN) [
21,
22] and the recursive Hopfield network (RHN) [
23,
24,
25]. The recursive Hopfield network is characterized by associative memory, thanks to which it is mainly used for pattern recognition [
23]. The Elman network has a simplified recursion model and is used in the processing of time series [
21]. In the IM diagnostic systems, the Elman network is more often used [
21,
22] due to the applied data processing method. Nevertheless, the associative memory of the Hopfield network is widely used in error recognition systems, e.g., electronic [
23] or electromechanical [
25] systems.
One previous work [
26] presented a comparison of the effectiveness of three types of classic NN structures—MLP, SOM, and RHN—when applied to early damage detection in the stator winding and the IM rotor, based on the analysis of the axial flux signal induced in the measuring coil located on the motor. The results of the effectiveness tests of three different structures of damage detectors, developed using the mentioned NNs, were presented and it was shown that each of them presents specific advantages and disadvantages. All of the analyzed NNs presented quite good results in detection of separate stator or rotor winding faults, however the weakest results for fault detection and classification were obtained in the case of the mixed IM electrical faults.
In the literature from the last 20 years, many hybridization structures for NNs were developed by combining different soft computing paradigms, which offers benefits associated with the advantages of the various techniques considered. These methods can be grouped into three classes:
- –
models—whereby mathematical models of NNs include various typological functions, creating the so-called hybrid neural networks (HNNs), including serial connections of different neural structures,
- –
algorithms—whereby the learning procedure uses traditional and heuristic methods,
- –
data—whereby NNs are obtained from heterogeneous data structures.
All these methods can be effective for a given problem and a set of databases, but none of the methodologies can generally be assessed as the best for all applications [
27].
HNNs have also been tested for IM fault detection and classification [
28,
29,
30,
31,
32]. The first works on the subject concerned the connection of a MLP network with fuzzy logic reasoning. Such a fuzzy hybrid neural network (F-HNN), composed of two subnetworks connected in a cascade—the fuzzy self-organizing layer performing the preclassification task and the following MLP working as the final classifier—was used in [
28] for IM bearing damage recognition. The problem of IM fault classification using HNN was raised, among others, in [
29,
30,
31,
32].
In [
29], a hybrid neural classifier of different IM faults is described, combining the auto-encoder neural network (A-ENN) and the lattice vector quantization (LVQ) model. The A-ENN is used for dimensionality reduction by projecting high-dimensional data into a 2D space. The LVQ model is used for data visualization by forming and adapting the granularity of a data map. The mapped data are employed to predict the target classes of new data samples. The presented results show that the hybrid classifier is more effective in terms of classification accuracy for various IM fault conditions than a classic MLP network. In [
30], the authors presented a possible IM defect classification method based on the response of the hybrid structure obtained via the combination of data classifiers and the idea of decision trees operation.
Literature analysis shows that the HNN solutions used are mainly based either on direct analysis of the network output vector using simple response evaluation algorithms or decision trees. However, none of the publications shows the possibility of differentiating damages occurring simultaneously. The use of a combination of several NN structures achieves a high effectiveness level in both deep neural networks [
31] and classic neural structures [
32].
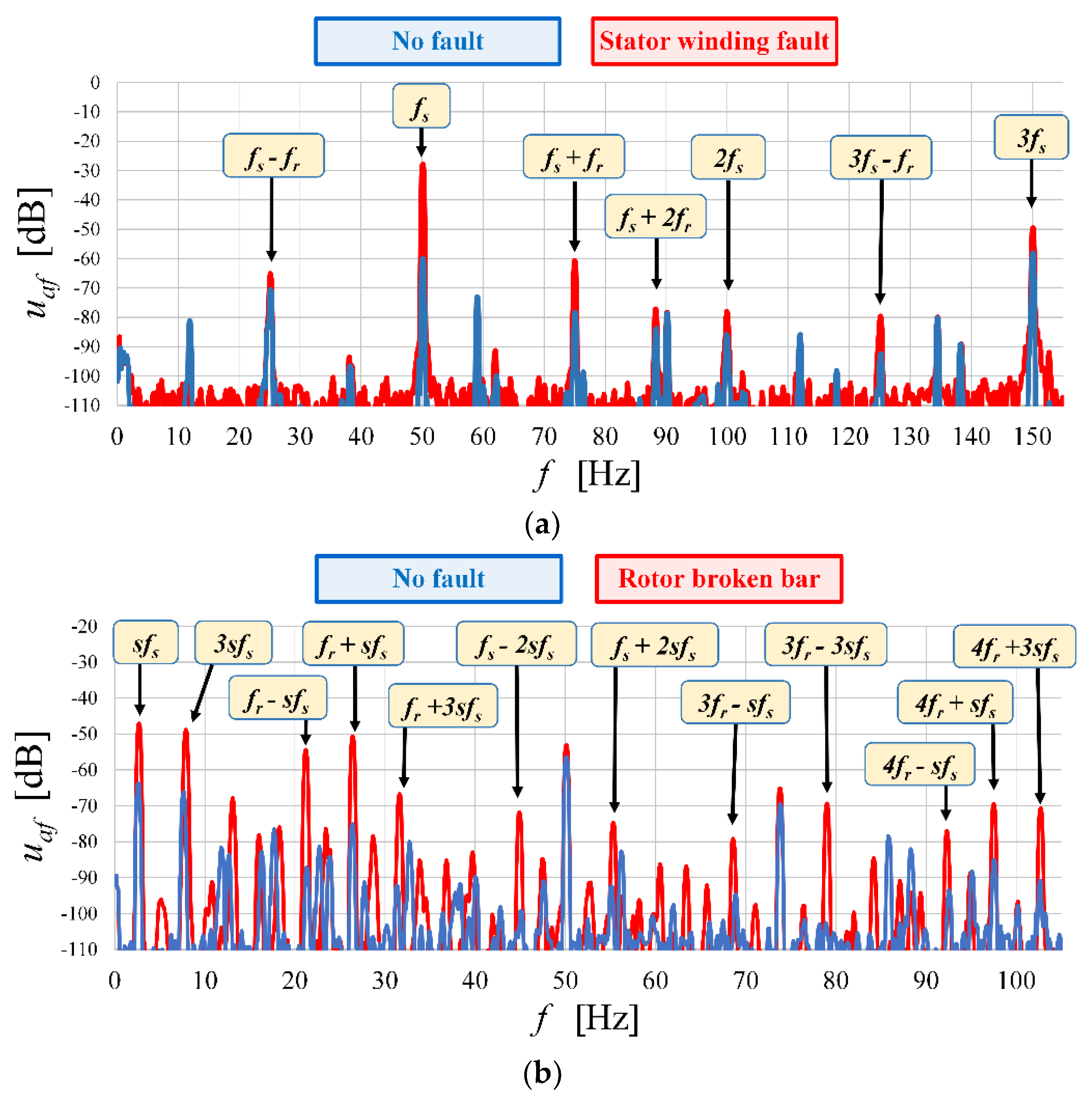
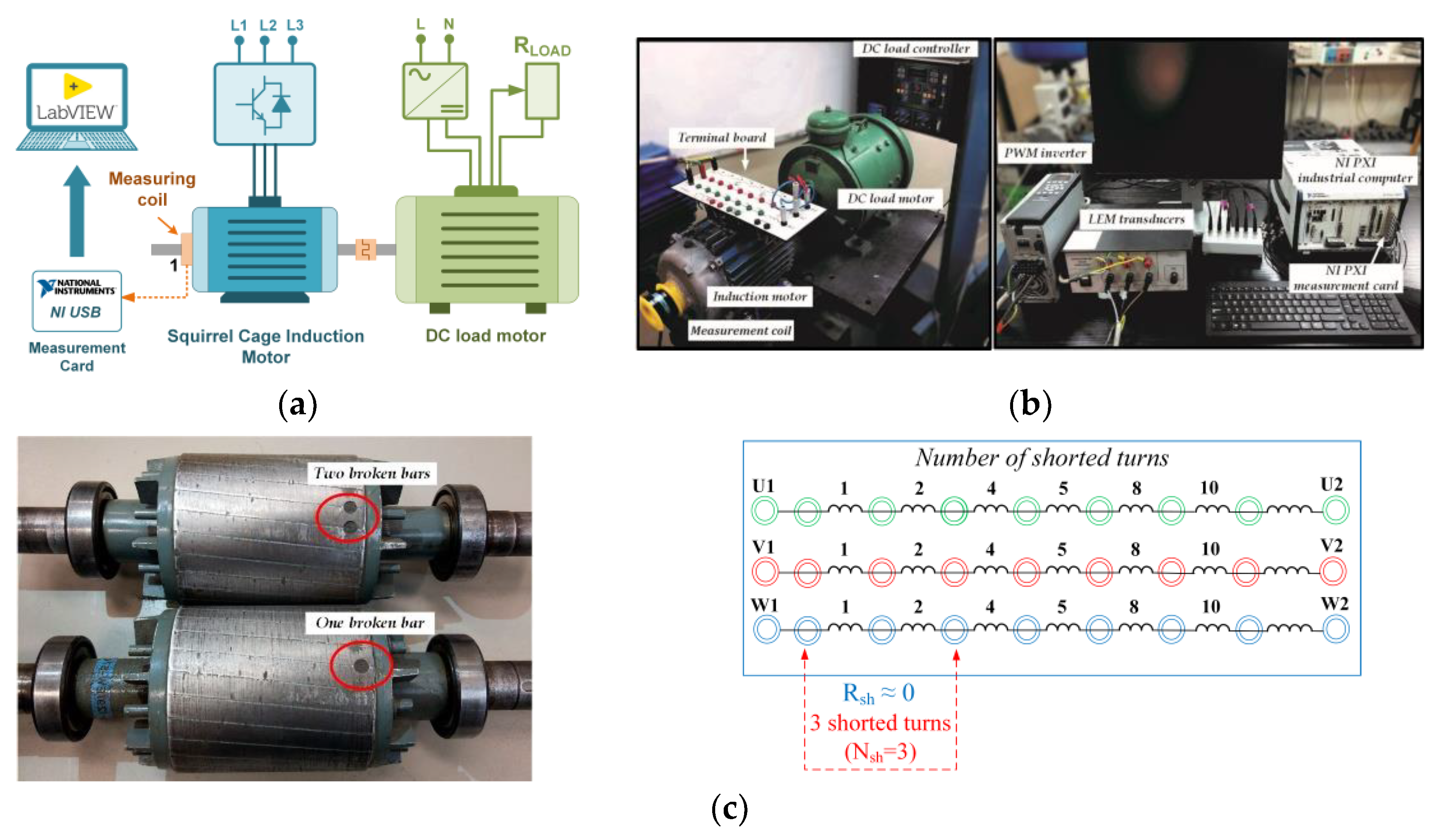
As stated above, damages to IM electric windings, in particular inter-turn short circuits, are avalanche in nature, and therefore from a technical point of view their detection only makes sense at the initial stage of their development. In addition, the symptoms of these damages strongly depend on the supply voltage frequency and the motor load value. For example, when a motor is lightly loaded, it is extremely difficult to detect damage to the rotor cage. Moreover, the simultaneous occurrence of these faults under light loads makes their classification and detection very difficult.
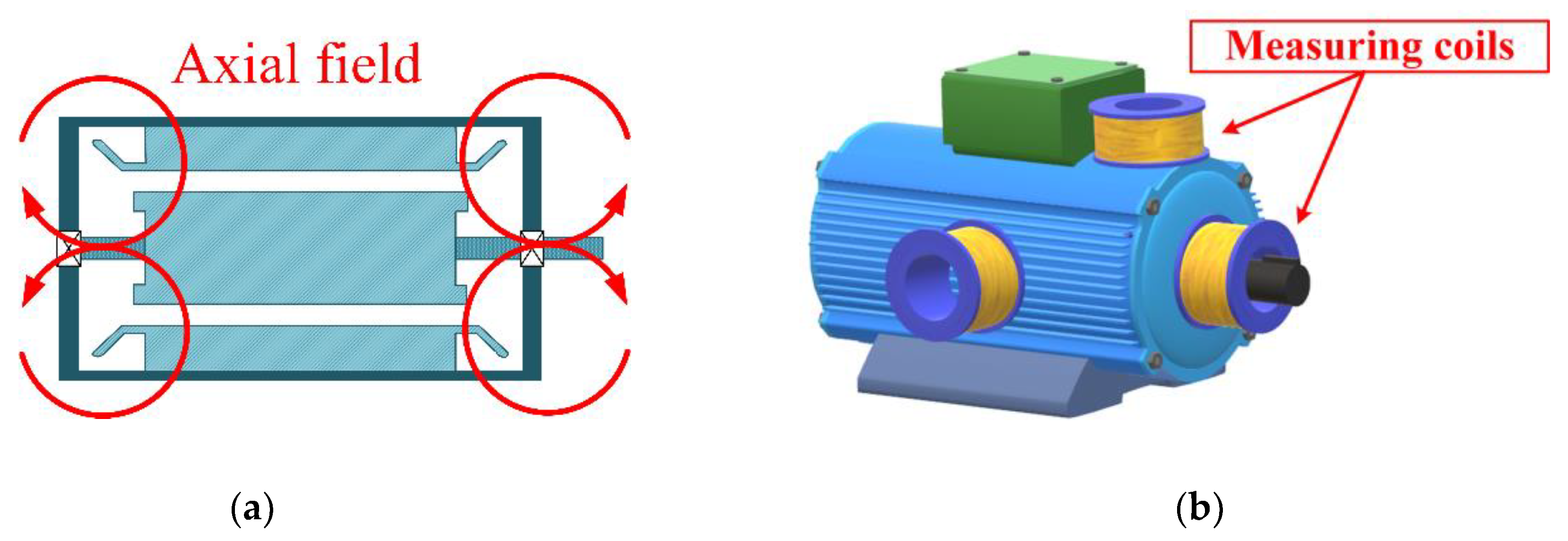
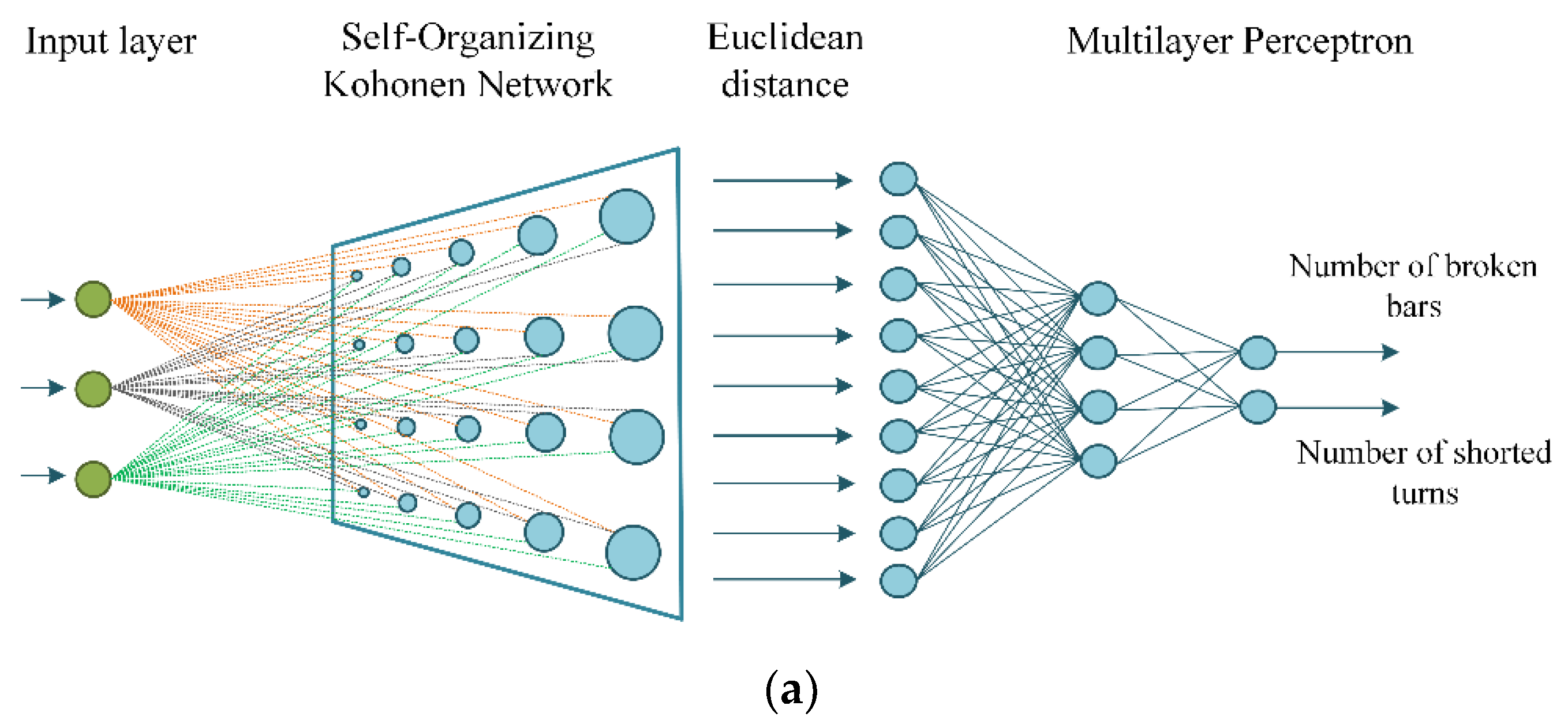
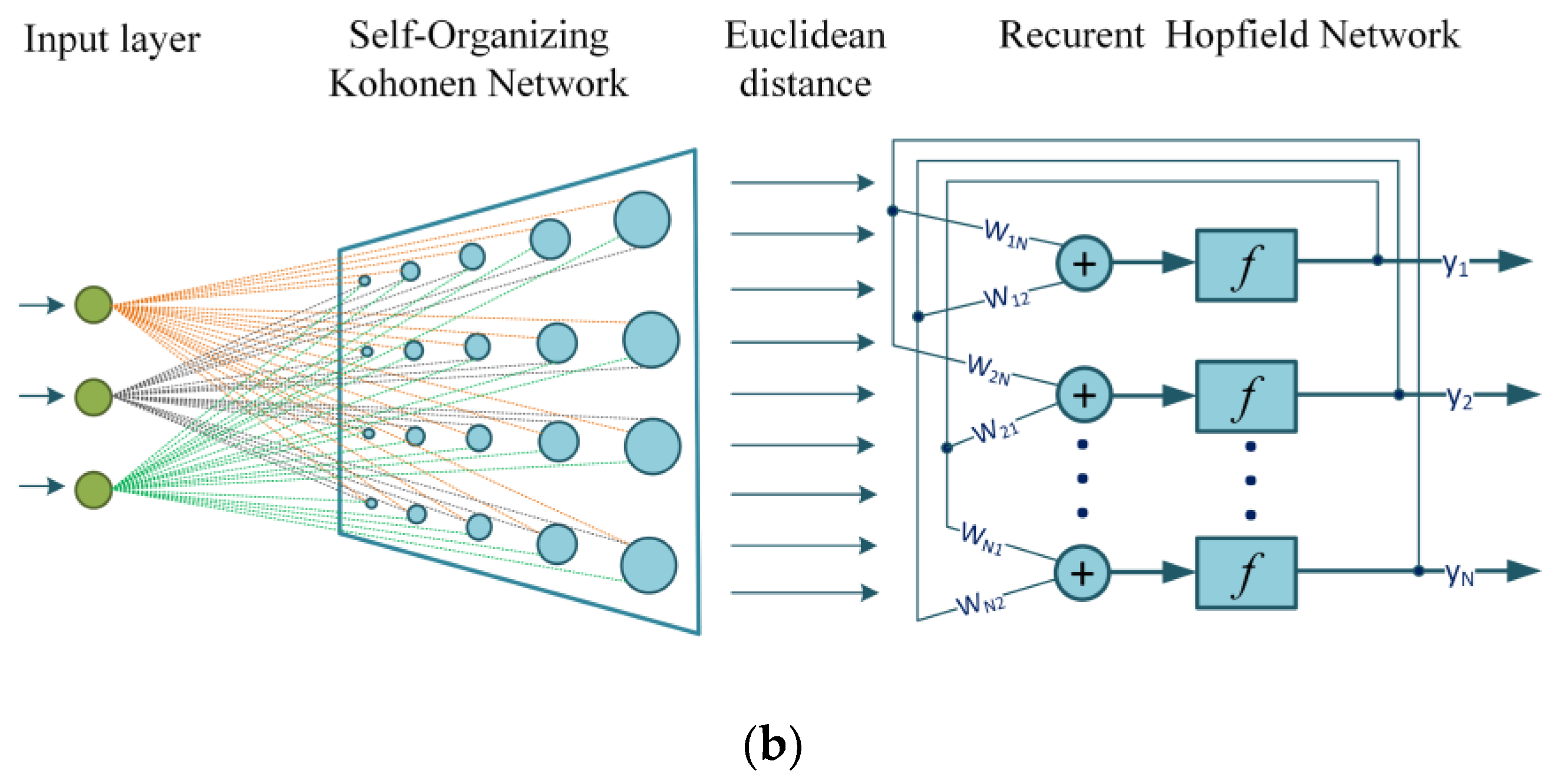
This article proposes the use of cascaded NN (CdNN) structures to assess their effectiveness in the classification and determination of the level of IM electrical winding damages in their initial stage. The specific CdNNs, which are composed of SOM and MLP networks, as well as SOM and RHN, are presented. The efficiency of such extended structures of fault detectors for IM stator and rotor windings in the detection of damage type and level is analyzed, both for single faults and mixed damages. The fault symptoms obtained from a fast Fourier transform (FFT) of the diagnostic signal (voltage induced in the axial flux measuring coil, similarly to [
6,
26]) are used as the CdNNs’ input.
The novelty of the solution presented in this article results from the structures used, as well as the method of signal transmission between individual CdNN members.
The article consists of six sections. After this introduction, the second section discusses the use of the axial flux signal as a source of diagnostic information. The third section is devoted to discussing selected classic neural structures in the detection of IM electrical circuit faults, especially in their initial phase. The subsequent two sections present the idea and results of the experimental verification of the developed cascaded neural structures (a specific type of the hybrid NNs). The article ends with a discussion of the benefits obtained from the use of CdNN structures.
6. Results
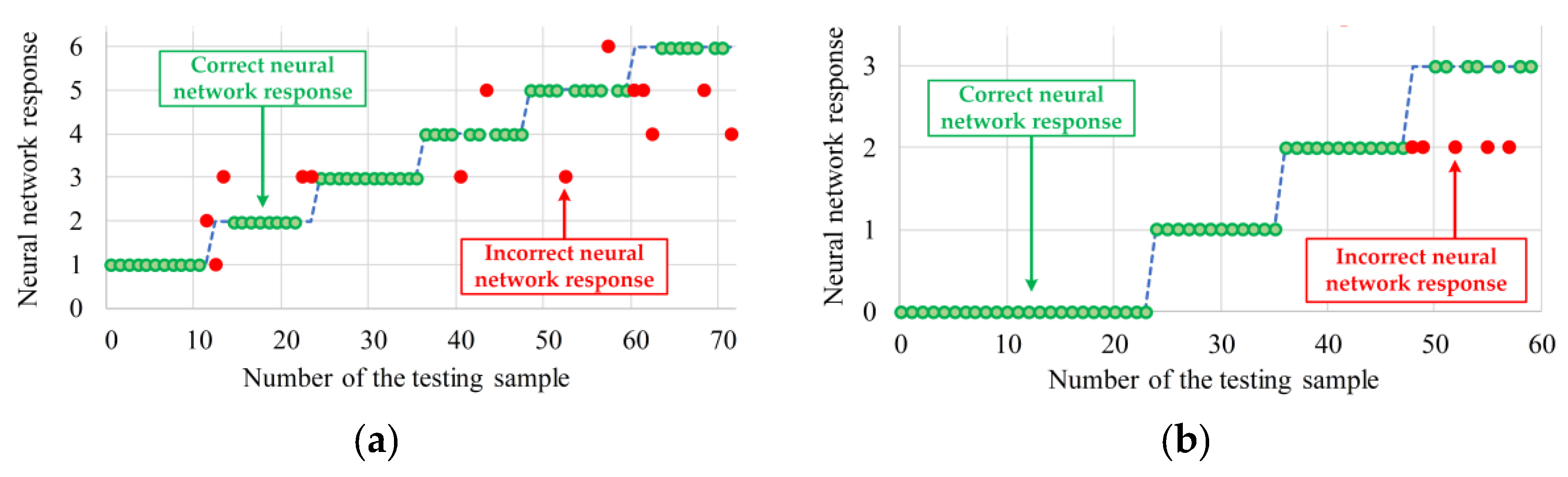
The use of cascaded structures of neural networks in the form of a classifier (SOM) and data analyzer (MLP or RHN) for the classification and detection of IM winding fault levels, in particular in their initial phase (incipient fault analysis), enabled the elimination of the basic disadvantages of individual single NNs used for such tasks.
Kohonen’s self-organizing SOM network eliminated the following disadvantages:
- –
no gradation of stator damage,
- –
difficulty in assessing the degree of damages (area boundaries),
- –
difficulty of automating the detection process,
- –
impossibility to assess mixed damages.
In the case of MLP networks, it eliminated:
- –
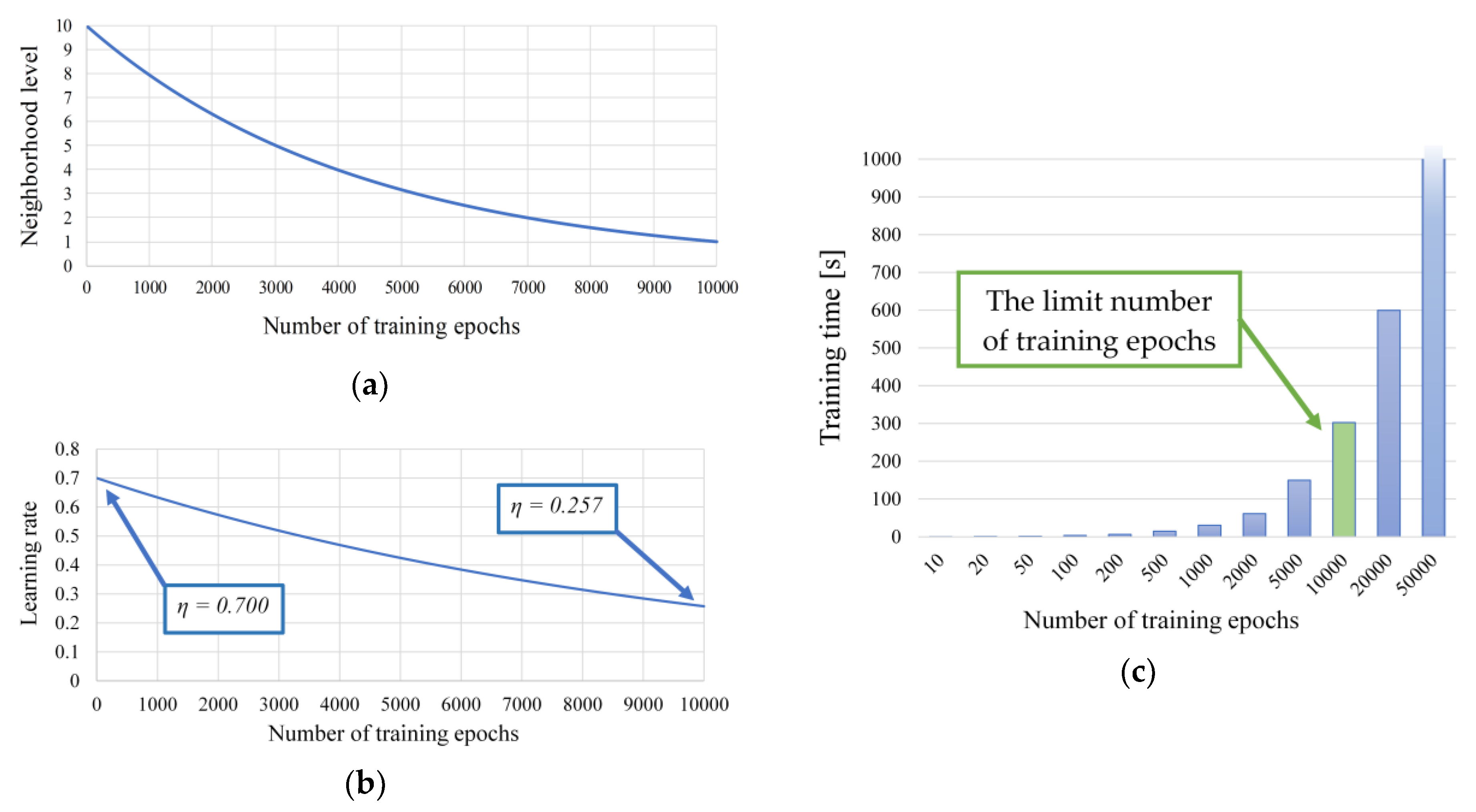
long learning process,
- –
impossibility of the detection of rotor bar damages at TL < 0.1 TLN,
- –
need for 2 hidden layers due to mixed damage.
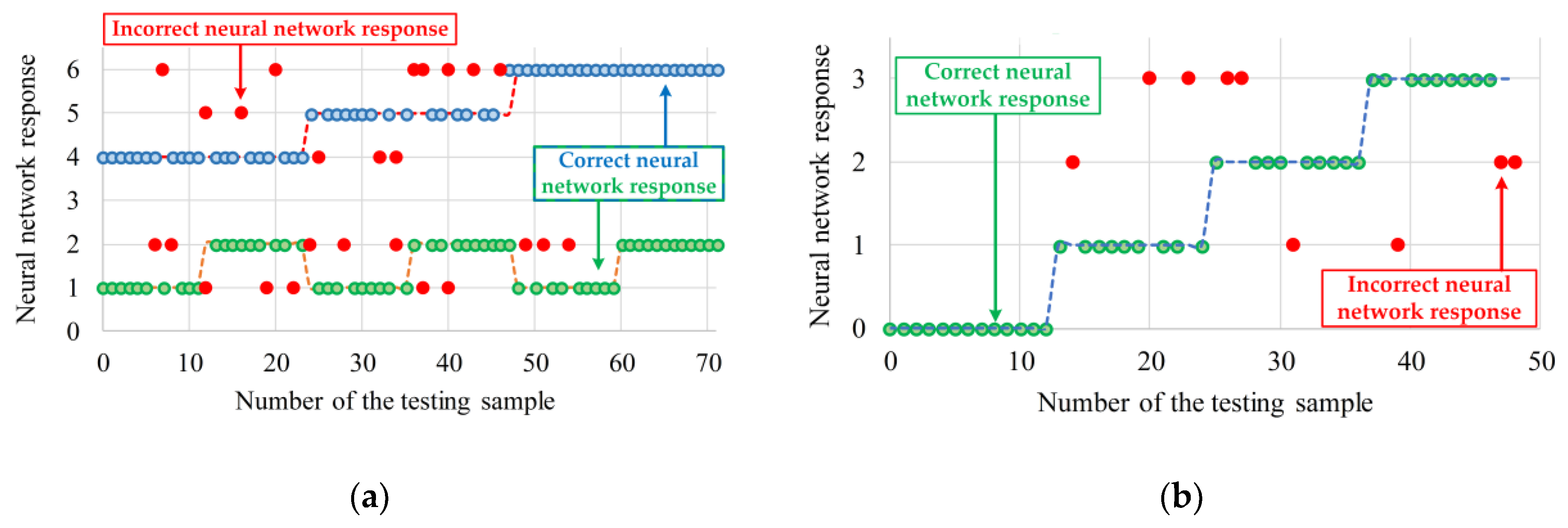
By contrast, for the recursive Hopfield network the following disadvantages were eliminated:
- –
lack of robustness to measuring disturbances,
- –
strong dependence of the detection efficiency on the base vector,
- –
lack of resistance to object changes,
- –
inability to assess mixed damages,
- –
strong dependence of the detection efficiency on the number of network inputs.
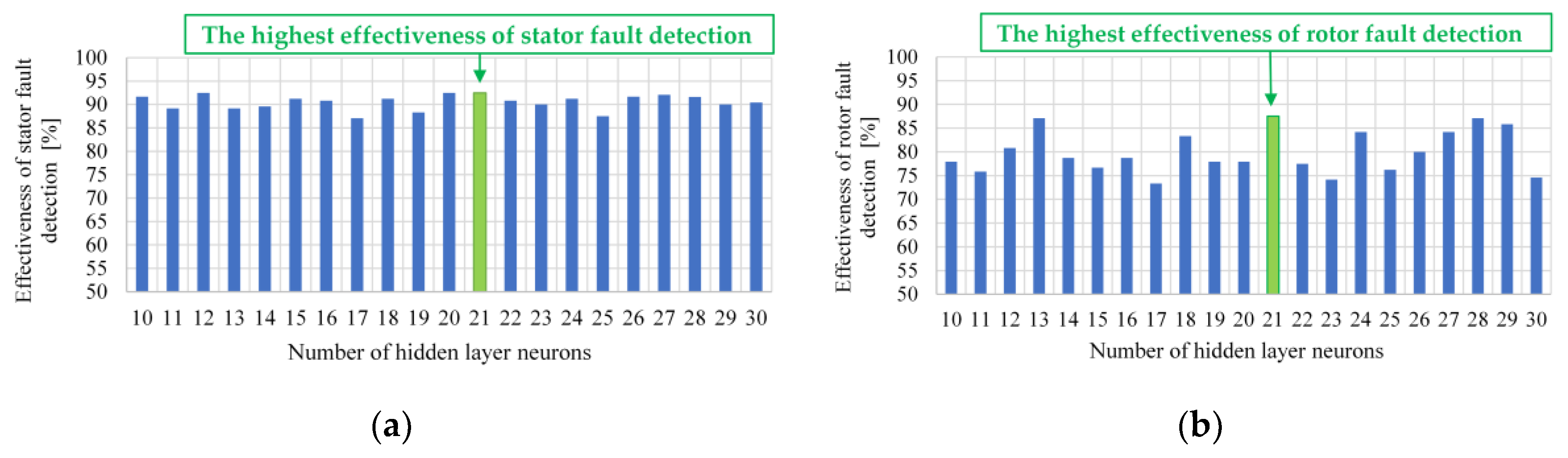
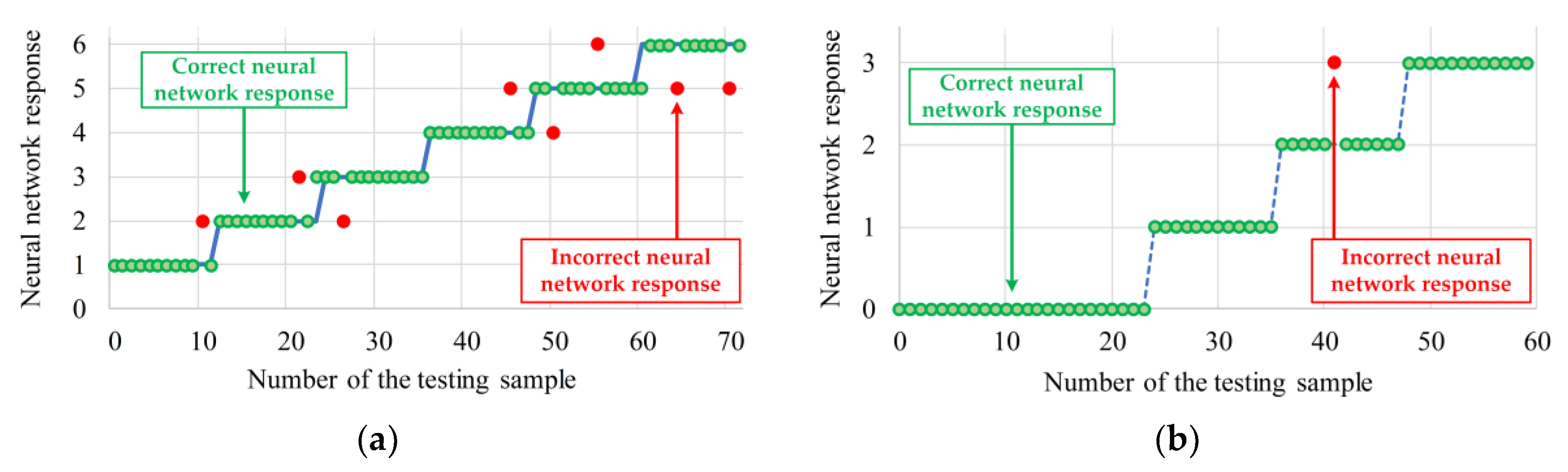
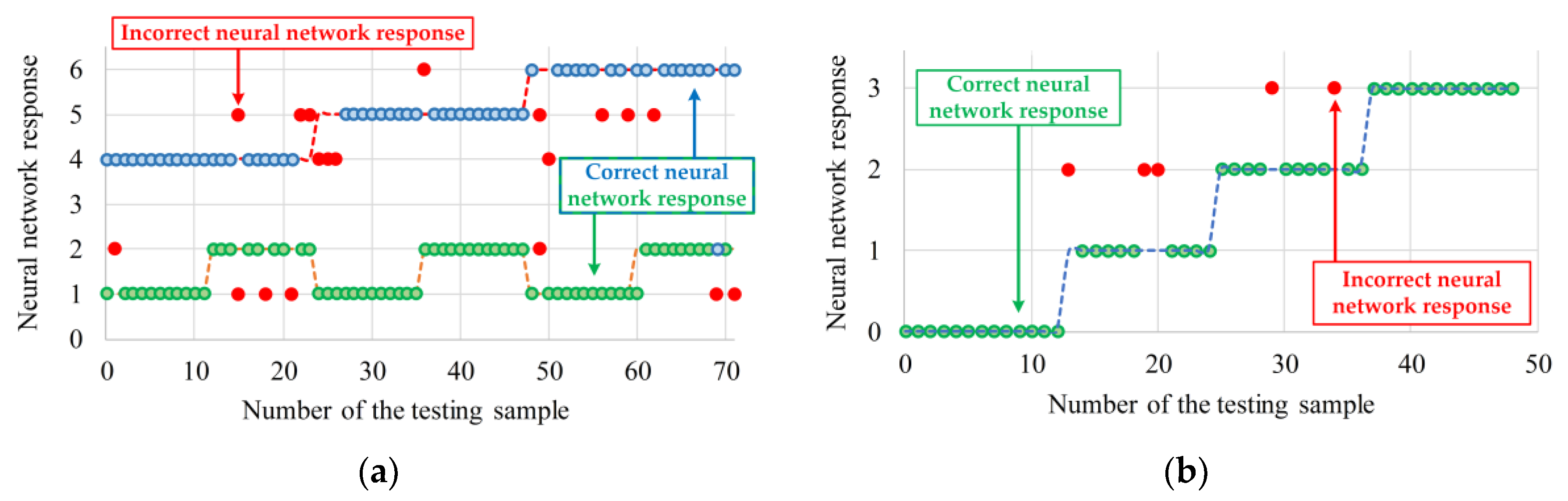
It can be summarized that the main improvements to the effectiveness of detection and classification of mixed damages (including initial fault levels), as well as the possibility of the detection of rotor bar damages at TL < 0.1TLN, determine the validity of using hybrid solutions in electrical winding fault detection and classification of IM, especially for the SOM–MLP combination structures.
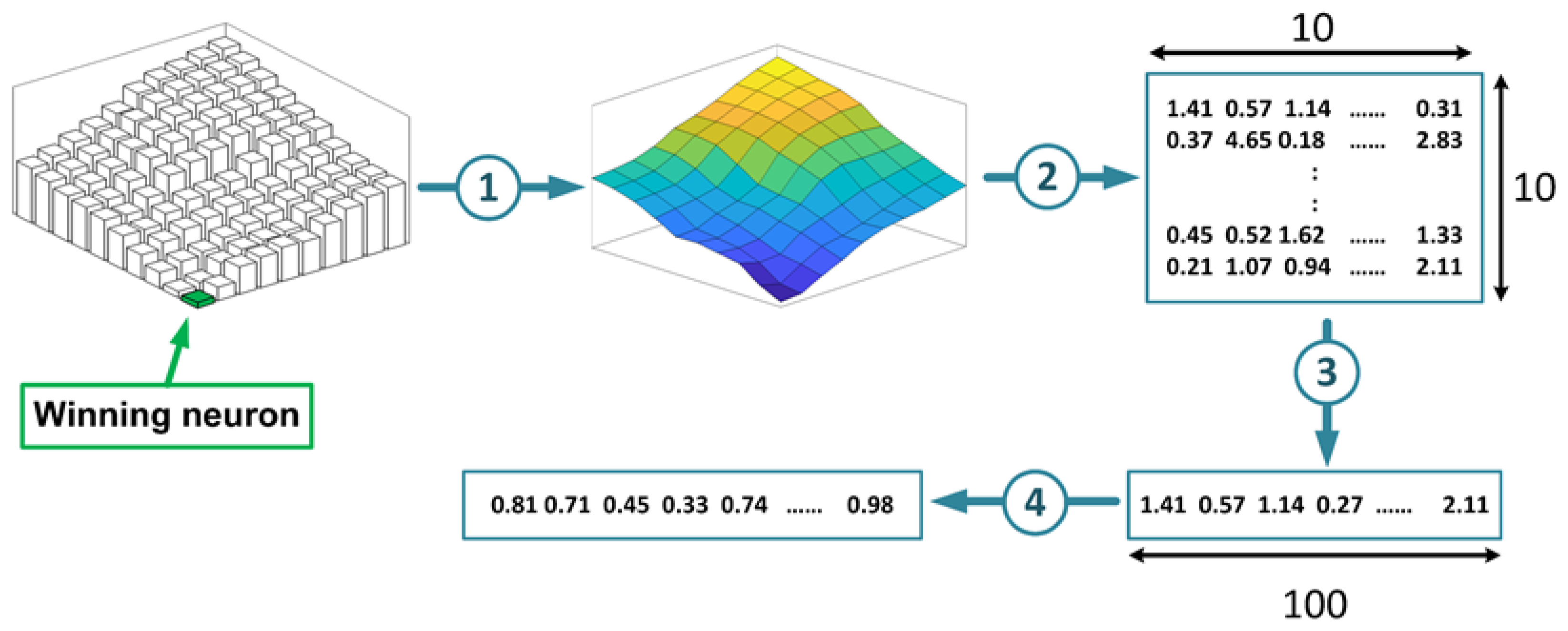
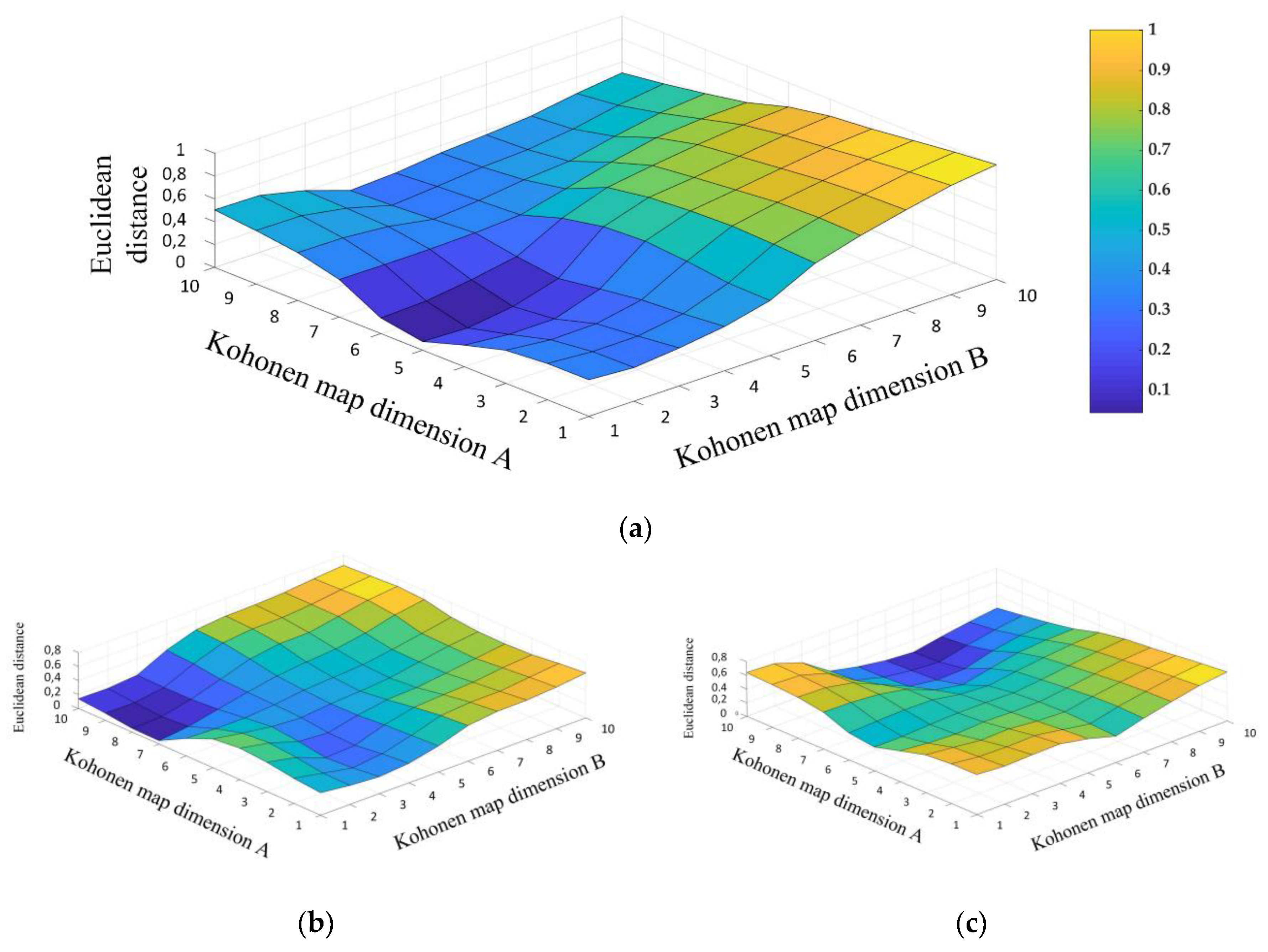
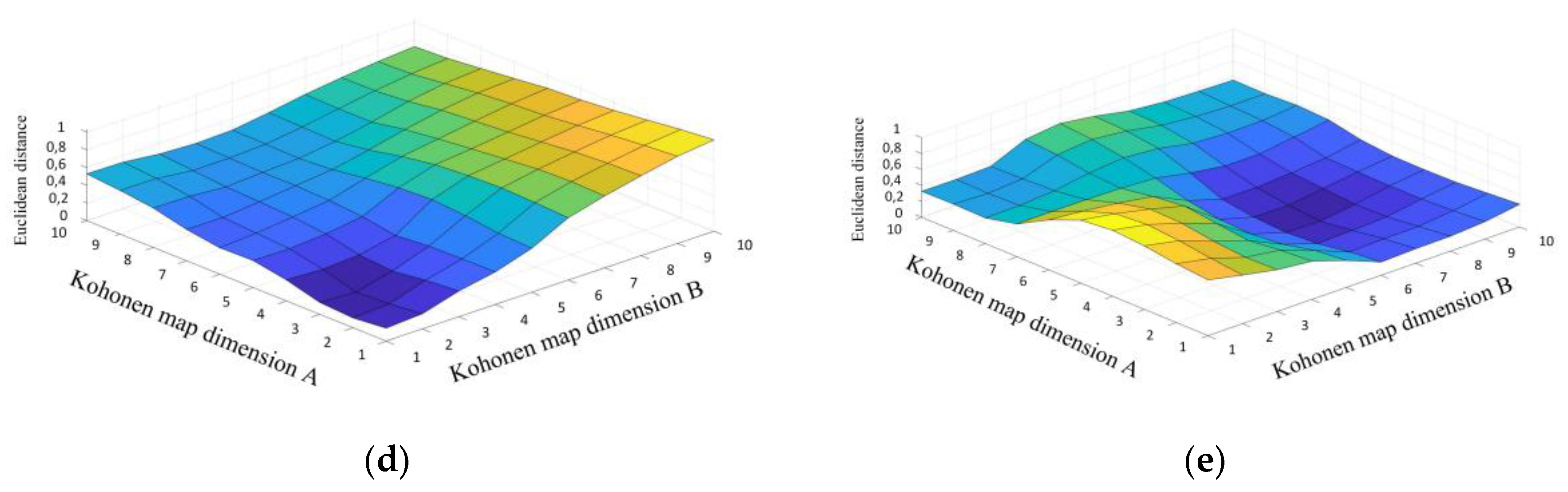
During the experimental verification of the implemented cascade neural networks, it was observed that the effectiveness of the final assessment of the technical condition of the machine depends mainly on the self-organizing Kohonen network. In the presented application, the SOM performs the function of a diagnostic information generator, indirectly providing information on the current state of the tested machine (type of damage, degree of damage). In connection with the above, the SOM, which is the superior element of the CdNN, gives the NN the ability to recognize damage, as well as assesses the network resistance to the interference occurring during the measurement, processing, and transmission of diagnostic information. The task of the second and subordinate CdNN module is to correctly read the information stored in the form of a vector of the Euclidean measures of distance between the input vector and SOM neurons. Therefore, when designing cascade-based neural damage detectors, special attention should be paid to the correct selection of the structure and parameters of the training process of the self-organizing Kohonen network.
The main features of the proposed CdNNs are summarized in the following
Table 8.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













