Cyber-Physical Co-Simulation of Shipboard Integrated Power System Based on Optimized Event-Driven Synchronization

Abstract
:1. Introduction
2. Structure of HLA-Based Cyber–Physical Co-Simulation Systems
2.1. HLA Framework and Run Time Infrastructure (RTI)
2.2. Cyber–Physical Co-Simulation System Strcture
3. Optimized Event-Driven Co-Simulation Synchronization Method
3.1. Optimized Event-Driven Synchronization Method
- At time t1, RTI sends PSCAD simulation data to OPNET and set t2 as the target time of OPNET simulation, then advance the OPNET simulation clock. Meanwhile PSCAD pauses at t1.
- At time te1, an OPNET interaction request is detected, the OPNET simulation pauses.
- Through RTI, OPNET simulation data and simulation time te1 is transmitted to PSCAD, where te1 is set as the next target time of PSCAD simulation.
- PSCAD simulation clock is advanced to te1 and then pauses.
- PSCAD send back power system simulation data back to OPNET. Upon receiving the data, OPENT resumes running, and its target time is still t2.
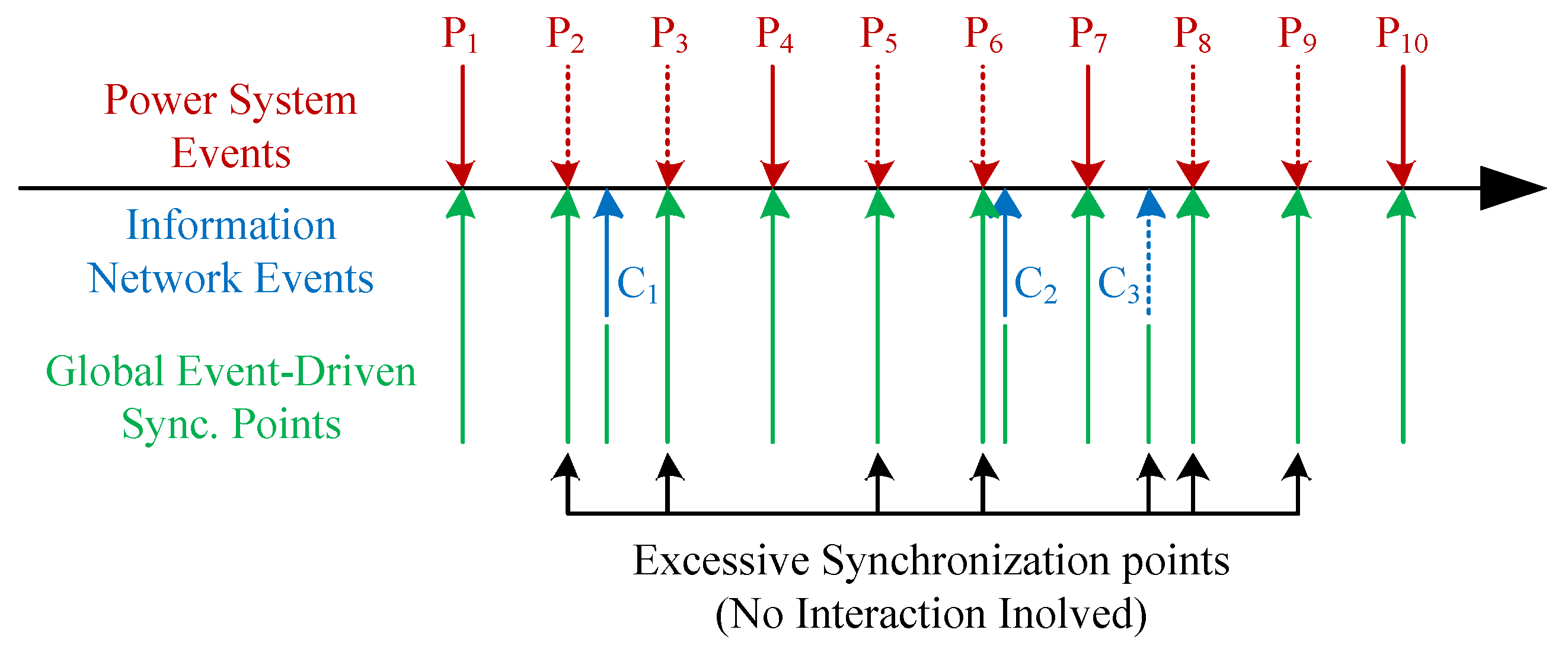
- There are two possible cases after OPNET resumes running. First, another interaction request may be detected before t2. In this case, OPNET simulation pauses, the process goes back to step 3, and synchronization is performed through step 3 to 5 at the time of the newly detected interaction request (as the red dashed lines in Figure 7). Then the process comes back to this step again. Second, if OPNET reaches t2 without detecting any new interaction requests, it means all the interaction requests between t1 and t2 have been processed. OPNET pauses at t2 and the process proceed to step 7. (as in the case of teN in Figure 7).
- After pausing at t2, OPNET send simulation data and time t2 to PSCAD.
- Upon receiving the OPNET data, PSCAD runs until t2 based on the data received in step 3, then pauses simulation and send simulation data to RTI. This co-simulation cycle is then completed, and the next cycle is ready to begin.
3.2. Optimization of Co-Simulation Data Exchange
4. Implementation of OPNET and PSCAD Interfaces
4.1. OPNET Interface Based on HLA Node
4.2. PSCAD Interface Based on User-Defined Module and Socket
5. Simulation Validation
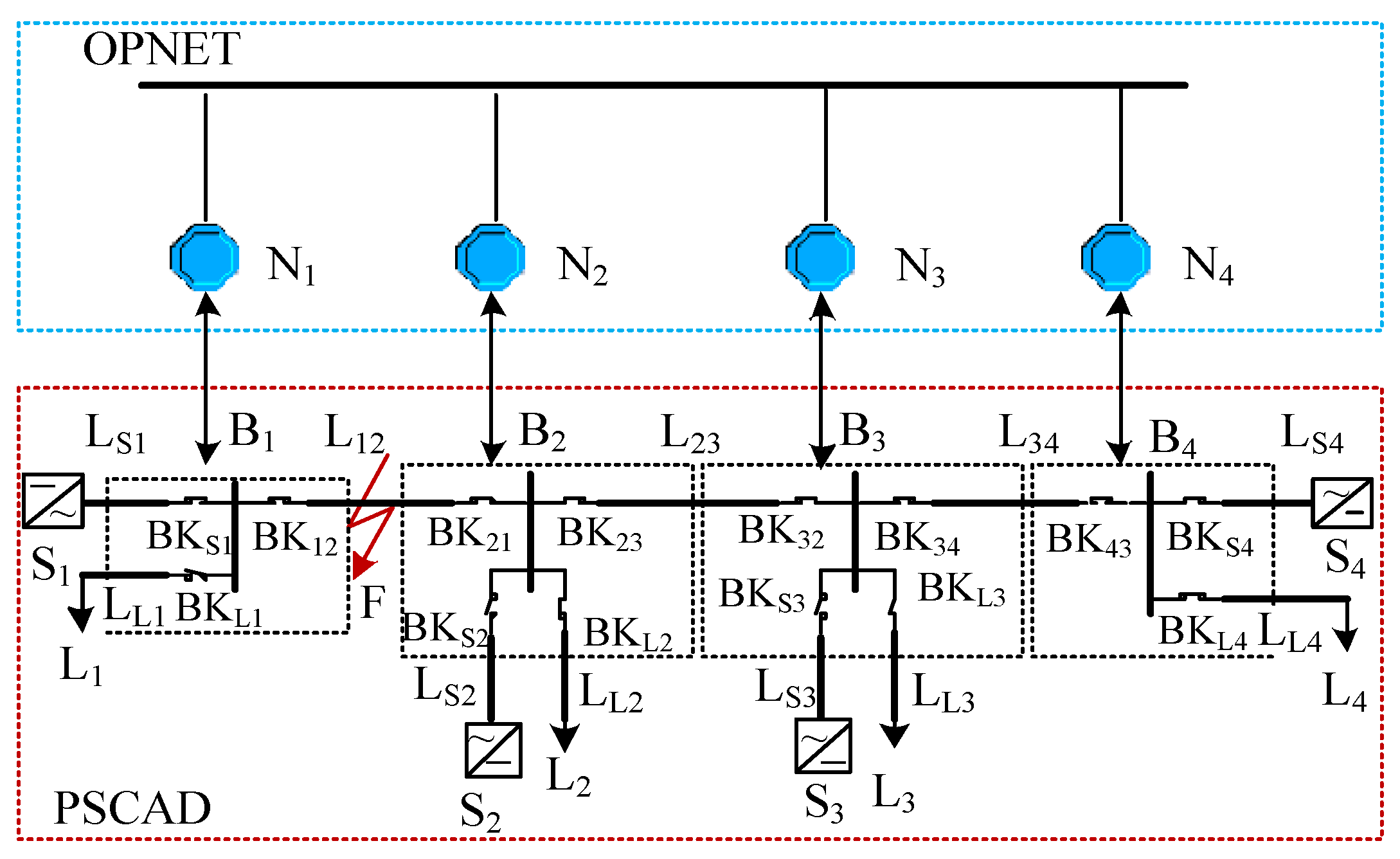
5.1. Co-Simulation Model
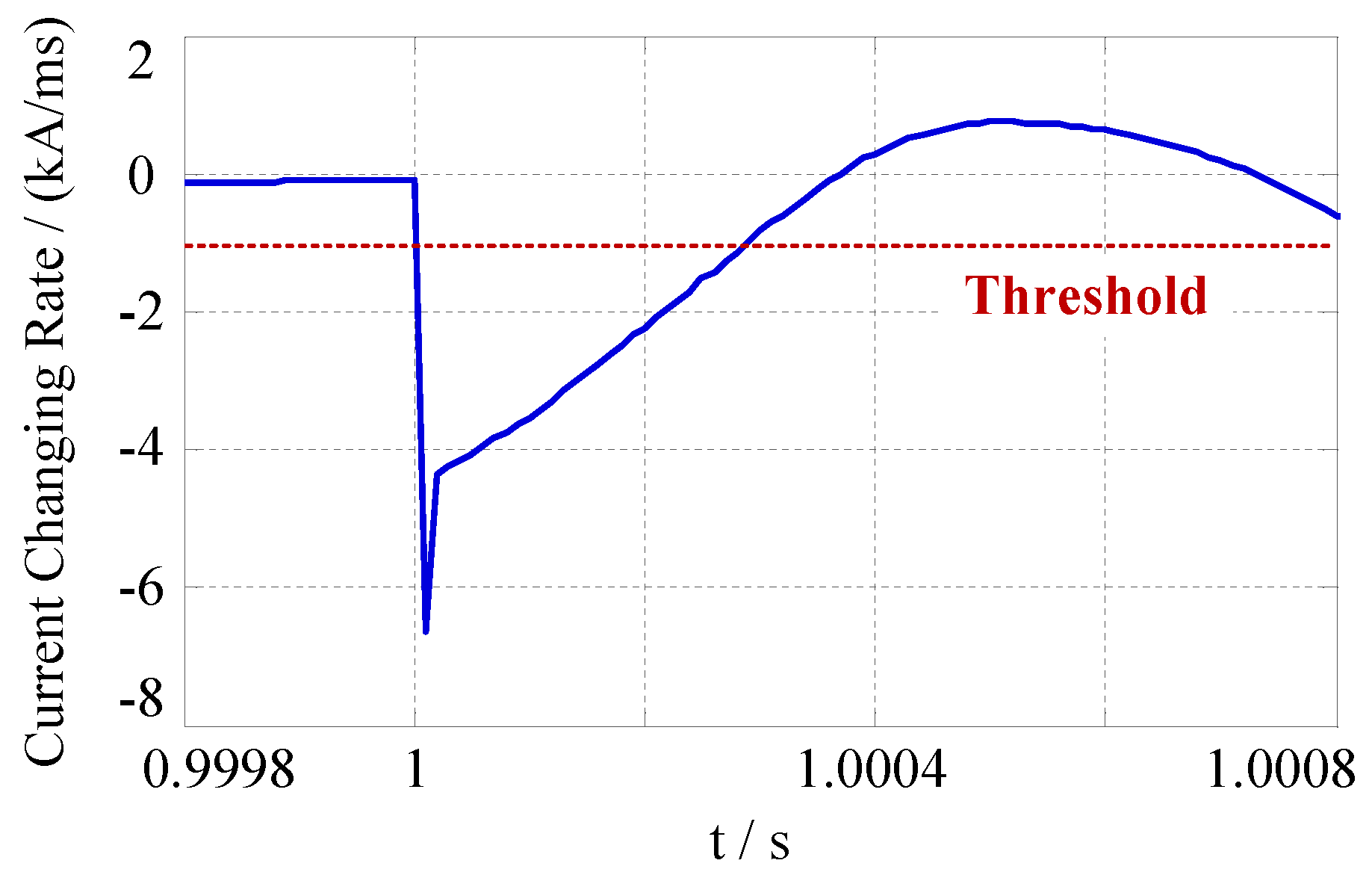
5.2. Co-Simulation Results
6. Conclusions
- A cyber–physical co-simulation platform is established based on PSCAD and OPNET. Such a combination enables the platform to simultaneously simulate both power system and information network with high precision, which fits the requirements of shipboard CPPS research.
- The platform is based on the HLA co-simulation framework. With the application of unified HLA interfaces in different simulators, the platform is highly expandable. It is convenient to incorporate other simulators in the platform and conduct more comprehensive co-simulation research of shipboard CPPS in the future.
- In the co-simulation platform, both power system and information network simulation are incorporated in co-simulation by adding an independent component to the existing model, without any major modification to the existing model itself. Such a method is flexible and facilitates CPPS research based on existing shipboard power system models.
- An optimized event-driven co-simulation synchronization method is proposed. By pre-defining power system interaction requests and detecting information network interaction requests in the simulation process, the proposed method can efficiently synchronize both simulations in time, thus greatly enhancing the co-simulation precision efficiently comparing to conventional methods.
- The proposed method simplifies the data transmission in the synchronization from bidirectional to unidirectional. Thus, the data transmission load in co-simulation is cut in half and co-simulation efficiency is further improved.
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| Abbreviation | Definition |
| IPS | Shipboard Integrated Power System |
| EMS | Energy Management System |
| CPPS | Cyber–Physical Power System |
| HLA | High Level Architecture |
| RTI | Run Time Infrastructure |
| FSM | Finite State Machine |
References
- Nguyen, V.H.; Besanger, Y.; Tran, Q.T.; Nguyen, T.L. On Conceptual Structuration and Coupling Methods of Co-Simulation Frameworks in Cyber-Physical Energy System Validation. Energies 2017, 10, 1977. [Google Scholar] [CrossRef] [Green Version]
- Palensky, P.; van der Meer, A.; Lopez, C.; Joseph, A.; Pan, K. Applied Cosimulation of Intelligent Power Systems: Implementing Hybrid Simulators for Complex Power Systems. IEEE Indus. Elect. Mag. 2017, 11, 6–21. [Google Scholar] [CrossRef]
- Mueller, S.C.; Georg, H.; Nutaro, J.J.; Widl, E.; Deng, Y.; Palensky, P.; Awais, M.U.; Chenine, M.; Kuch, M.; Stifter, M.; et al. Interfacing power system and ICT simulators: Challenges, state-of-the-art, and case studies. IEEE Trans. Smart Grid 2018, 1, 14–24. [Google Scholar] [CrossRef]
- Baran, M.; Sreenath, R.; Mahajan, N.R. Extending EMTDC/PSCAD for simulating agent-based distributed applications. IEEE Power Eng. Rev. 2002, 22, 52–54. [Google Scholar] [CrossRef]
- Tong, X. The co-simulation extending for wide-area communication networks in power system. In Proceedings of the Asia-Pacific Power and Energy Engineering Conference, Chengdu, China, 28–31 March 2010; pp. 1–4. [Google Scholar]
- Nutaro, J.; Kuruganti, P.T.; Miller, L.; Mullen, S.; Shankar, M. Integrated hybrid-simulation of electric power and communications systems. In Proceedings of the 2007 IEEE Power Engineering Society General Meeting, Tampa, FL, USA, 24–28 June 2007; pp. 1–8. [Google Scholar]
- Lévesque, M.; Xu, D.Q.; Joós, G.; Maier, M. Communications and power distribution network co-simulation for multidisciplinary smart grid experimentations. In Proceedings of the The 45th Annual Simulation Symposium, Orlando, FL, USA, 26–30 March 2012; pp. 6–10. [Google Scholar]
- Yu, W.; Xue, Y.; Luo, J.; Ni, M.; Tong, H.; Huang, T. An UHV Grid Security and Stability Defense System: Considering the Risk of Power System Communication. IEEE Trans. Smart Grid 2016, 7, 491–500. [Google Scholar] [CrossRef]
- Awais, M.U.; Gawlik, W.; De-Cillia, G.; Palensky, P. Hybrid simulation using SAHISim framework. In Proceedings of the 8th International Conference on Simulation Tools and Techniques, Athens, Greece, 24–26 August 2015; pp. 273–278. [Google Scholar]
- Duan, Y.; Luo, L.; Li, Y.; Cao, Y.; Rehtanz, C.; Kuch, M. Co-simulation of distributed control system based on JADE for smart distribution networks with distributed generations. IET Gener. Trans. Distr. 2017, 11, 3097–3105. [Google Scholar] [CrossRef]
- Schütte, S.; Scherfke, S.; Tröschel, T. Mosaik: A framework for modular simulation of active components in smart grids. In Proceedings of the 2011 IEEE First International Workshop on Smart Grid Modeling and Simulation (SGMS), Brussels, Belgium, 17 October 2011; pp. 55–60. [Google Scholar]
- Li, W.; Monti, A.; Luo, M.; Dougal, R.A. VPNET: A co-simulation framework for analyzing communication channel effects on power system. In Proceedings of the 2011 Electric Ship Technologies Symposium, Alexandria, VA, USA, 10–13 April 2011; pp. 143–149. [Google Scholar]
- Li, W.; Luo, M.; Zhu, L.; Monti, A.; Ponci, F. A co-simulation method as an enabler for joint analysis and design of MAS-based electrical power protection and communication. Simulation 2013, 89, 790–809. [Google Scholar] [CrossRef]
- Li, W.; Zhang, X.; Dong, Y. Study of co-simulation methods applied in power systems (part I): VPNET. Proc. CSEE 2012, 32, I0013. [Google Scholar]
- IEEE Standard for Modeling and Simulation (M&S) High Level Architecture (HLA)—Framework and Rules; IEEE Std.: Piscataway, NJ, USA, 2000; pp. 1516–2000.
- Roth, T.; Burns, M. A gateway to easily integrate simulation platforms for co-simulation of cyber-physical systems. In Proceedings of the workshop on Modeling and Simulation of Cyber-Physical Energy Systems, Porto, Portugal, 10 April 2018; pp. 1–6. [Google Scholar]
- Hopkinson, K.; Wang, X.; Giovanini, R.; Thorp, J.; Birman, K.; Coury, D. EPOCHS: A platform for agent-based electric power and communication simulation built from commercial off-the-shelf components. IEEE Trans. Power Syst. 2006, 21, 548–558. [Google Scholar] [CrossRef]
- Hopkinson, K.; Birman, K.P.; Giovanini, R.; Anini, R.G.; Coury, D.; Wang, X.; Thorp, J. EPOCHS: Integrated commercial off-the-shelf software for agent-based electric power and communication simulation. In Proceedings of the Winter Simulation Conference, Piscataway, NJ, USA, 7–10 December 2003; pp. 1158–1166. [Google Scholar]
- Georg, H.; Muller, S.C.; Dorsch, N.; Rehtanz, C.; Wietfeld, C. INSPIRE: Integrated co-simulation of power and ICT systems for real-time evaluation. In Proceedings of the 2013 IEEE International Conference on Smart Grid Communications, Vancouver, BC, Canada, 21–24 October 2013; pp. 576–581. [Google Scholar]
- Georg, H.; Wietfeld, C.; Müller, S.C.; Rehtanz, C. A HLA based simulator architecture for co-simulating ICT based power system control and protection systems. In Proceedings of the IEEE Third International Conference on Smart Grid Communications, Tainan, Taiwan, 5–8 November 2013; pp. 264–269. [Google Scholar]
- Georg, H.; Müller, S.C.; Rehtanz, C.; Wietfeld, C. Analyzing cyber-physical energy systems: The INSPIRE cosimulation of power and ICT systems using HLA. IEEE Trans. Indus. Infor. 2014, 10, 2364–2373. [Google Scholar] [CrossRef]
- Yin, Q.; Duan, B.; Kang, C.; Li, H. Joint simulation design of energy system and information communication system based on HLA/Agent. Autom. Electr. Power Syst. 2016, 40, 22–29. [Google Scholar]
- Chen, G.; Zhang, Z.; Yin, X. Design of wide-area backup protection simulation platform based on HLA/Agent. Proce. CSEE 2013, 33, 153–162. [Google Scholar]
- Shum, C.; Lau, W.H.; Mao, T.; Chung, H.S.; Tsang, K.; Tse, N.C.; Lai, L.L. Co-Simulation of Distributed Smart Grid Software Using Direct-Execution Simulation. IEEE Access 2018, 6, 20531–20544. [Google Scholar] [CrossRef]
- Lin, H.; Veda, S.S.; Shukla, S.S.; Mili, L.; Thorp, J. GECO: Global Event-Driven Co-Simulation Framework for Interconnected Power System and Communication Network. IEEE Trans. Smart Grid 2012, 3, 1444–1456. [Google Scholar] [CrossRef]
- Brito, A.V.; Bucher, H.; Oliveira, H.; Costa, L.F.S.; Sander, O.; Melcher, E.U.K.; Becker, J. A Distributed Simulation Platform Using HLA for Complex Embedded Systems Design. In Proceedings of the 2015 IEEE/ACM 19th International Symposium on Distributed Simulation and Real Time Applications (DS-RT), Chengdu, China, 14–16 October 2015; pp. 195–202. [Google Scholar]
- Lu, D.Z.; Yang, H. Unlocking the Power of OPNET Modeler; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]
- ISO 11898-1. Road Vehicles—Controller Area Network (CAN)-Part 1: Data Link Layer and Physical Signaling; International Standard Organization: Geneva, Switzerland, 2003. [Google Scholar]
- Wu, Y.; Fu, L.; Xu, Y.; Ma, F.; Lu, Y. Controller area network modeling and its application in cyber-physical power system co-simulation. In Proceedings of the 37th Chinese Control Conference, Wuhan, China, 25–27 July 2018; pp. 6178–6183. [Google Scholar]
- Hao, X.; Ma, F.; Ren, Q. Directional interlocking overcurrent protection of microgrids powered by inverters injected with characteristic currents. In Proceedings of the 43rd Annual Conference of the IEEE Industrial Electronics Society (IECON), Beijing, China, 29 October–1 November 2017; pp. 220–226. [Google Scholar]
- Ni, X.; Zhang, Y. Determining message delivery delay of controller area networks. In Proceedings of the 2002 IEEE Region 10 Conference on Computers, Communications, Control and Power Engineering, Beijing, China, 28–31 October 2002; pp. 767–771. [Google Scholar]
- Luo, G.; Dong, K.; Feng, N.; Li, K.; Lian, X. CAN modeling and simulation of a hybrid electric vehicle based on OPNET. Jour. Tsing. Univ. 2005, 5, 689–692. [Google Scholar]
- Li, X.; Ding, F.; Xiong, H. CAN Modeling and simulation based on OPNET. Jour. Beijing Univ. Aero. Astro. 2009, 35, 284–288. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Rated capacity of inverter | 562 kVA |
| Rated output voltage of inverter | 400 V |
| Rated output current of inverter | 811.9 A |
| Amplitude of characteristic current | 162.4 A |
| Length of transmission lines | 50 m |
| Threshold of short-circuit current changing rate | ±1000 A/ms |
| Threshold of short-circuit current direction judge | 229.6 A |
| Step of sampling | 500 μs |
| Bandwidth of CAN bus | 500 kbps |
| Length of a standard CAN bus packet | 108 bit |
| Method | N1 Sending Command | B1 Receiving Command | N2 Sending Command | B2 Receiving Command | Number of Synchronization Points |
|---|---|---|---|---|---|
| Fixed-step Method | 1744 μs | 2000 μs | 2093 μs | 2500 μs | 4000 |
| Global Event-Driven Method | 1744 μs | 1750 μs | 2093 μs | 2100 μs | 40,008 |
| Proposed Method | 1744 μs | 1750 μs | 2093 μs | 2100 μs | 4002 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Y.; Fu, L.; Ma, F.; Hao, X. Cyber-Physical Co-Simulation of Shipboard Integrated Power System Based on Optimized Event-Driven Synchronization. Electronics 2020, 9, 540. https://doi.org/10.3390/electronics9030540
Wu Y, Fu L, Ma F, Hao X. Cyber-Physical Co-Simulation of Shipboard Integrated Power System Based on Optimized Event-Driven Synchronization. Electronics. 2020; 9(3):540. https://doi.org/10.3390/electronics9030540
Chicago/Turabian StyleWu, You, Lijun Fu, Fan Ma, and Xiaoliang Hao. 2020. "Cyber-Physical Co-Simulation of Shipboard Integrated Power System Based on Optimized Event-Driven Synchronization" Electronics 9, no. 3: 540. https://doi.org/10.3390/electronics9030540