1. Introduction
Bus travel time prediction is an important component of an intelligent transport system (ITS). The precise capturing of real-time travel information facilitates the choice of an optimal route by a traveler. Additionally, with unforeseen events occurring, traffic managers adjust departure schedules in real time to ensure the service quality of a system [
1,
2]. Nevertheless, the travel time of the same bus route in the same city is dynamic due to the nature of bus operation because of frequent traffic congestion, traffic accidents, and road construction. Therefore, it is necessary to focus on a real-time and dynamic bus travel time prediction model in depth in order to further improve traffic efficiency.
Bus travel time prediction has three dependencies. (1) Time dependence [
3]: Due to the strong periodicity of passenger demand, bus scheduling also has a certain periodicity. Moreover, bus travel time also depends on the tendency of recent historical travel times. (2) Spatial dependence: The travel time of a particular line is influenced not only by the current traffic state variables of the running line but also by the traffic state variables of the entire bus line [
4]. (3) Exogenous dependence: Some exogenous variables, weather conditions, and emergencies may have a great impact on traffic timing prediction [
5]. However, driven by big traffic data, a challenge arises: can one gain broad utilization of the latent knowledge hidden in big traffic data in order to predict bus travel time?
Currently, the original statistical-based parameter models (such as K-Nearest Neighbor (KNN) or ARIMA) or machine learning models (such as Support Vector Machine (SVM)) are experiencing more and more difficulty in meeting the requirements of big data in some areas, while the research field of neural networks is active [
6,
7]. Recently, the neural network shallow prediction model has been used in most scenarios [
8]. However, these models have limitations when dealing with large historical data sets and complex nonlinear functions [
9].
Deep learning integrates multi-layer architecture and regression to extract inherent features in an end-to-end way. Based on the analysis of a large amount of real-time and historical traffic data, a deep neural network model can deal with the nonlinear characteristics of traffic data and obtain more precise prediction results [
10]. However, real-time dynamic bus travel time prediction is very complex, and it involves complex space-time features [
11,
12]. Moreover, the potential traffic status and traffic events are in a hidden mode. Therefore, the development of a deep learning model is not well suited to capturing the deeper characteristics of bus travel time effectively [
13].
For the critical issue of interpreting the space-time features of bus travel time, data-driven methods and neural network methods have been doubted to have this ability [
5]. However, there have been a few research literature references that have focused on the diverse traffic features affecting the final prediction of bus travel time. Therefore, this research aimed to explore a new methodology for handling a large number of spatio-temporal features by using deep learning models for the prediction of bus travel time.
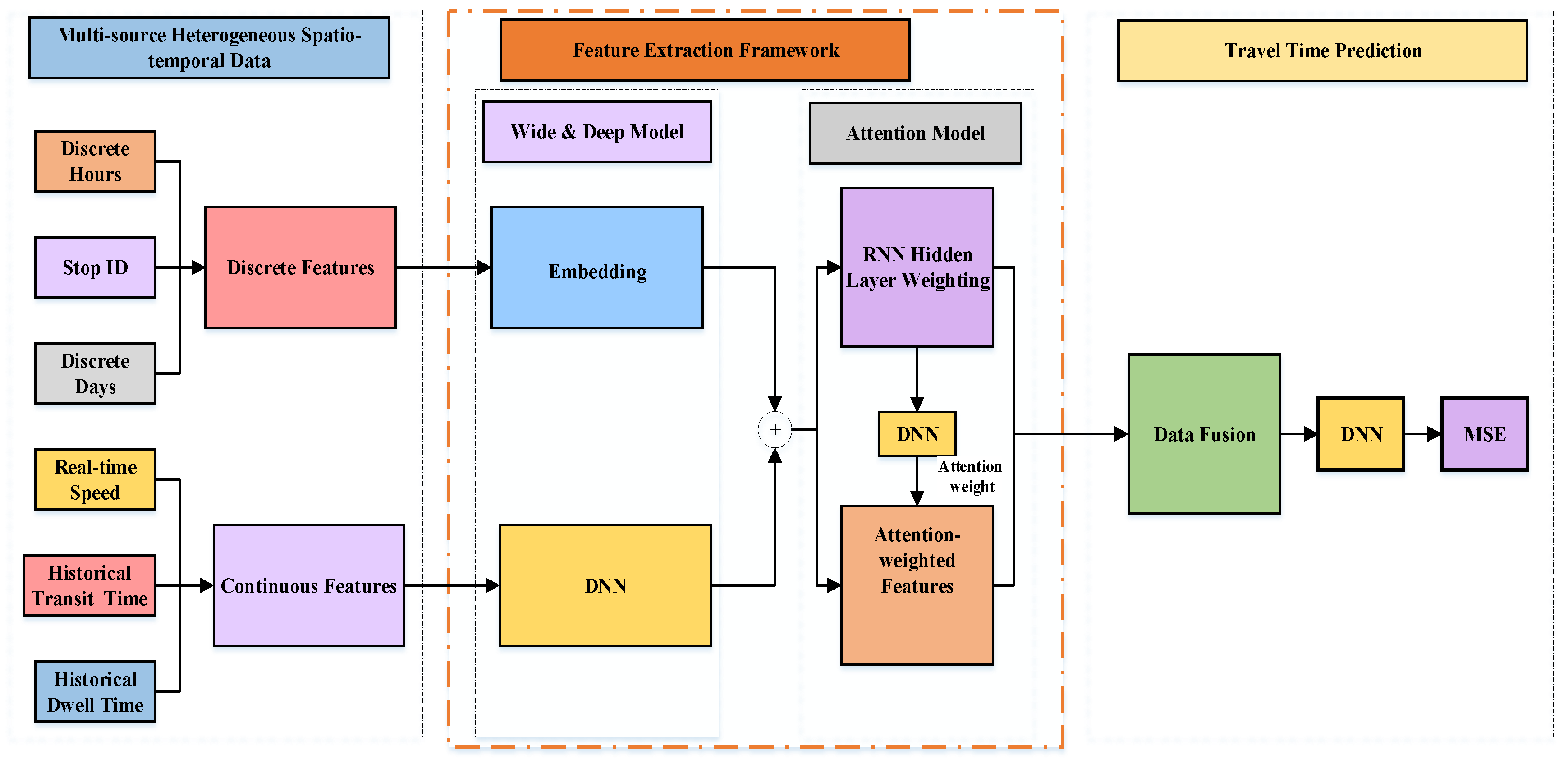
In order to solve the problem of focusing on big data feature extraction for bus travel time prediction, in this study, a dynamic real-time bus travel time prediction method was proposed based on a deep learning feature extraction framework and data fusion. In this research, bus travel times were divided into running times and dwelling times, and Global Positioning System (GPS) speeds were added for taxis and buses, as well as travel times based on real-time speeds in order to predict dynamic bus travel times, as indicated in
Figure 1. In summary, the main contributions of the proposed approach are those reported below.
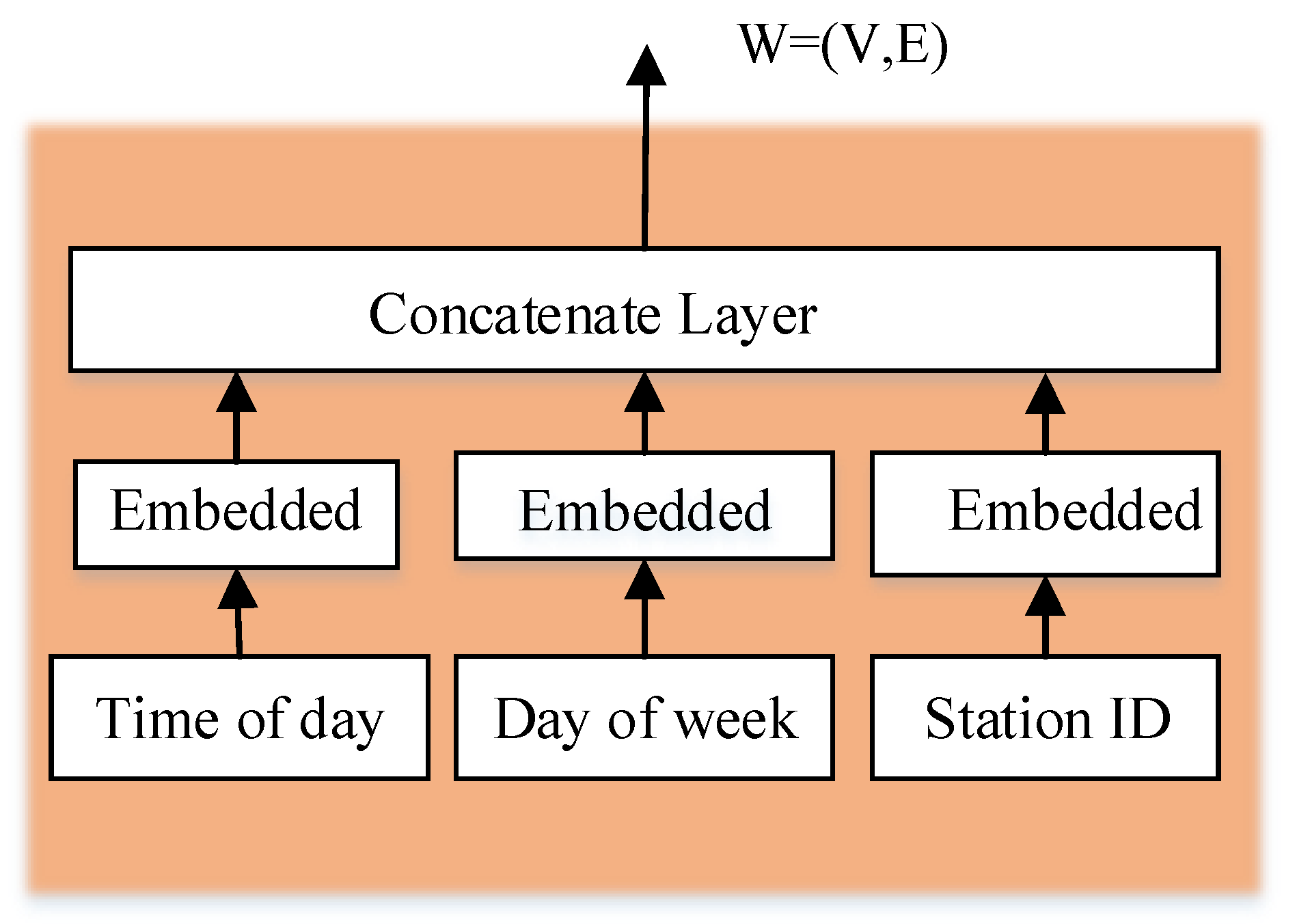
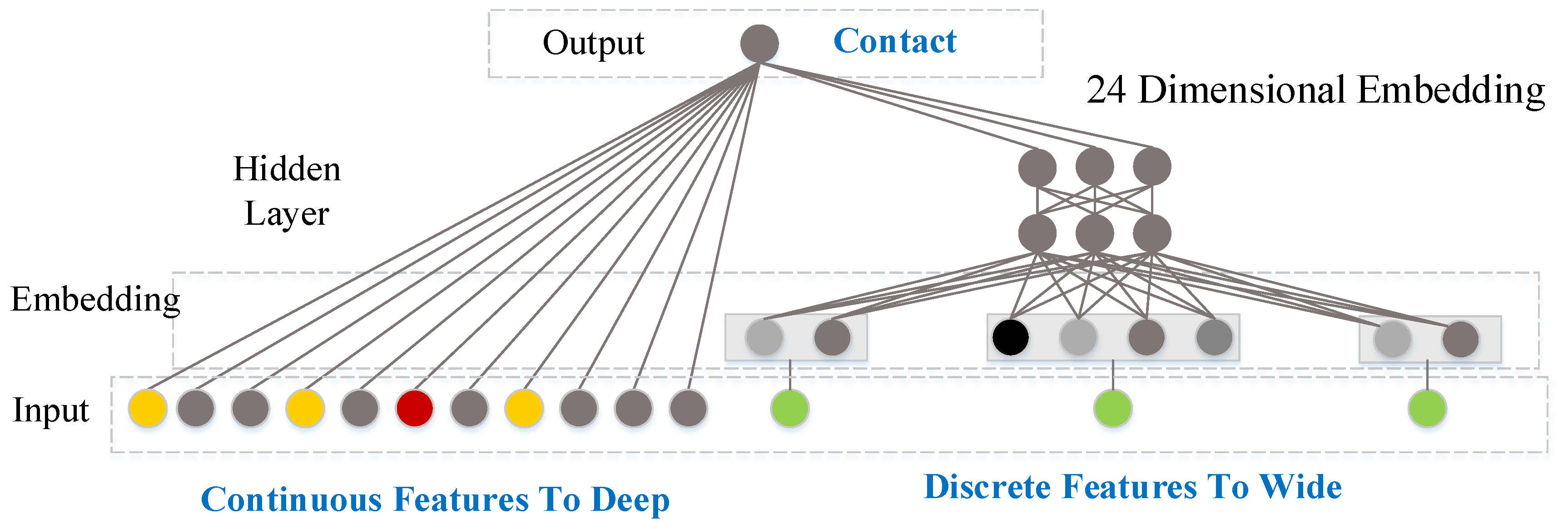
Based on the prediction of bus travel time, in this research, a new heterogeneous feature extraction framework was proposed based on the recurrent neural network (RNN) model of embedding wide and deep (WD) and an attention mechanism. The framework was proposed in order to gain a deep understanding of the spatio-temporal features and intrinsic connections of the characteristics related to bus travel time and to visualize the connections.
Fourteen spatial and temporal features were introduced, including stop Identities (IDs) as special characteristics, bus dwelling times at different historical levels, real-time GPS bus speeds with real-time possible transit times obtained based on real-time bus speeds as temporal features. These features have not been analyzed together in previous surveys. Lastly, multiple super positions of the RNN and Deep Neural Networks (DNNs) were employed to reduce the residual heterogeneous data fusion and real-time dynamic bus travel time prediction. A novel system for real-time dynamic bus travel time prediction was offered.
To verify the model’s stability and generalization ability, the model was tested on the datasets of the Guangzhou No. 226 bus and the Shenzhen No. 113 bus. These buses ran along the main roads in large urban centers. Both of the experiments achieved good results. Other studies never tested their models in different cities.
2. Literature Review
Ever since the rapid development of deep learning methods occurred, the potential for processing large-scale high-dimensional data has been maturing [
3,
10,
14,
15,
16,
17,
18].
Recurrent Neural Network (RNN), which is a distinctive construction of deep learning models, is widely used to solve sequence problems [
19]. This type of network extends a DNN by repeatedly connecting hidden layers in different timestamps. In this network structure, memory units can dynamically model sequence data. Lately, some studies in the field of transportation has begun to seek RNN to solve the problem of time series predictions, such as traffic flow [
20], traffic speed [
10], and travel time prediction [
21]. Petersen et al. (2019) and He et al. (2020) developed an RNN architecture for the prediction of bus travel times. They demonstrated that the network could capture long-term time dependencies in traffic data, as shown in
Table 1 [
6,
22].
Deep Neural Networks (DNN) has deep fully connected neural layers. An individual DNN does not require the manual extraction of features, and it learns in a supervised way. For our specific problem, the factors that caused congestion, queue delays, and traffic flow came from the fuzzy interaction with complex features. DNN is a multi-layer deep structure that can extract features from data and reveal important potential or hidden structures. Furthermore, DNN provides a powerful and new way to learn how these features interact. Abdollahi et al. (2020) trained a deep, multi-layer perceptron to predict bus travel time [
5].
Although the exploration of deep learning models with applications to bus travel time prediction has achieved delightful results, there are still some limitations in these fields. A comparison of the latest bus travel time prediction studies is shown in
Table 1.
There are few existing studies on bus travel time prediction using deep learning methods. It has been even rarer to study real-time dynamic bus travel time prediction. In the only studies, although the deep learning methods had a powerful ability to handle large amounts of data and high-dimensional data, the gap between large-scale data and its shallow structure, the gap between full connectivity and rich features [
5,
13], and the hidden patterns of potential traffic states and traffic events made it difficult for the above models to derive representative features from the rich feature data set. In other words, there has been a lack of systematic, perfect, and in-depth feature learning. Therefore, it is necessary to develop a deep-seated deep learning architecture that fully reflects the features of bus travel time prediction.
The existing studies of the prediction of bus travel time with feature learning still belong to the category of shallower feature learning. Examples include geospatial feature analysis, principal component analysis (PCA), and unsupervised learning algorithms (K-Means) to extract spatial features, and a deep-stacked auto-encoder (SAE) to represent low-dimensional features [
5,
23]. Using the deep structure of a Recurrent Neural Network (RNN) in time, the historical sequence information was automatically remembered in the model structure [
6,
22]. The spatial features of the data were extracted from the Convolutional Neural Network (CNN) for use by the Long Short-Term Memory (LSTM) network [
22]. DNNs were also used to predict bus travel times after feature extraction [
5]. However, most of the research on bus travel time has been shallow in terms of the feature learning structures [
5,
6,
23], lack of feature learning [
4,
22], or lack of feature learning depth and related breadth. Therefore, it is of great significance to develop a deep feature extraction structure that fully reflects the characteristics of travel time.
The study proposed a neural network that integrated embedded, wide and deep algorithm, and attention mechanisms, and introduced them into a dynamic bus travel time prediction model for design. The extraction framework made use of the non-static space-time correlation existing in urban public transport networks and discovered complex models that traditional methods could not capture. Our study also visualized the RNN model to interpret the impact of various spatial-temporal features on the prediction of dynamic bus travel times, which challenged the traditional neural network approach in the public transport field.
4. Data Collection and Feature Definition
4.1. Data Collection
We evaluated our approach using a large number of buses and taxi GPS data, as well as the bus Automatic Vehicle Monitoring (AVL) data collected by the Transport Department of Guangzhou and Shenzhen in the south of China, which are metropolises with populations of over 14.9 million people and 13.2 million people, respectively.
The bus travel time prediction could be divided into a main road with a signal and a road without a signal. Our experiment in Guangzhou and Shenzhen included different signal periods for multiple intersections connected to each other, which was more challenging for the accuracy of urban main road prediction [
27].
To test the No. 226 Bus line in Guangzhou City (23.2 km, 28 stations), the dates for 27 sections and the corresponding areas were collected from 5 October 2014, to 9 November 2014. The No. 226 bus ran through the artery roads (such as Huangpu Road and Dongfeng Road). The running time of the vehicles was 6:00–22:00, and the departure time was 10 min.
The Shenzhen data set used data for the No. 113 bus (19.5 km, 23 stations) with 23 sections and the corresponding areas collected from 20 March 2018, to 5 August 2018. The buses ran through the main road, ShenNan Avenue. The running time of the vehicles is 6:10–23:00, and the departure time was about 4–8 min.
4.2. Features and Definition
Firstly, the main reason why existing estimation approaches could not achieve excellent accuracy is the fact that the travel times are impacted by various factors, such as different weather conditions [
28,
29], temporal variation of peak and off-peak hours [
4,
30,
31], boarding passenger information [
32,
33,
34], and real-time traffic conditions [
35,
36]. Some work focus on analyzing the impacts of different factors. In the study of He [
37], the traffic state reports from Twitter information is added as additional data support to predict travel times. The results show that knowing real-time traffic condition helps to increase the estimation accuracy. From the analysis results of the above studies, we can observe that the traffic conditions are uncertain and important for travel time prediction [
38]. However, bus GPS data are usually infrequent. Especially, the penetration rate of buses in the traffic network is low at low speed. It is less insensitive to irregular traffic conditions than taxis. It can be observed that only limited studies exist that analyses the influence of real-time traffic flow conditions on bus travel times and the correlation between them [
4].
Secondly, the data of Shenzhen city is of 2016. In 2016, the working hours of bus lanes in Shenzhen were from 7:30 am to 9:30 am and from 17:30 pm to 19:30 pm on weekdays (except statutory holidays).Taxes are usually allowed to travel on bus lanes during non-bus lane working hours. In addition, in the field observation of taxi operation, it is found that sometimes passengers will park in the bus lane when getting on or off the taxi. As a result, taxis sometimes run on bus lanes.
Moreover, the data of Guangzhou comes from the time when bus lanes have not been implemented. Therefore, at that time, buses and taxis were traveling together. Therefore, bus GPS and taxi GPS were taken into account when considering the traffic status. Additionally, Different studies have different definitions of real-time. Nikolas Julio [
39] defined the dynamic travel time prediction as 10 min when studying the use of traffic shock waves and machine learning algorithms to predict bus speed in real time. Qichongb [
40] Predicts bus real-time travel time basing on both GPS and RFID data based on the assumption that the traffic flow keeps the same level in an interval of 30 min although he collects GPS data every 30 s. Hans [
41] forecasts Real-time bus route state using particle filter and mesoscopic modeling with four loop detectors installed along the same corridor. Archived data provides access to volume and occupancy information collected approximately every minute. In order to predict the dynamic bus travel time, this paper adds the real-time GPS speed data of the bus every 20 s to the feature for dynamic bus travel time prediction, which effectively improves the prediction accuracy.
Allowing for the data of Shenzhen city based on 2016-year when the exclusive hours of bus lanes in Shenzhen were from 7:30 am to 9:30 am and from 17:30 pm to 19:30 pm on weekdays (except statutory holidays). Besides, taxes are indeed allowed to travel on bus lanes during non-exclusive-bus operating hours. In addition, in the field observation of taxi operation, it is found that sometimes passengers will park in the bus lane when getting on or off the taxi. As a result, taxis always run on bus lanes. Moreover, the fundamental data derived from bus GPS and taxi GPS were taken into account in the paper, which are assumed to represent the traffic status of the PT and road transit, respectively.
We selected fourteen characteristic data sets related to bus travel time prediction, including discrete data, continuous data, spatial data, and time data, as shown in
Table 2. In this paper, the features of exited studies is refined into multiple stages, and expanded to the speed of bus and taxi rather than that of one kind vehicle, thus making it more comprehensive to reflect the traffic state.
The existed studies on dynamic travel time using deep learning model, especially the dynamic bus travel time, has not yet been considered. Therefore, based on the above eigenvalues, we added the real-time speed collected within 20s of the bus prediction time into the deep learning model proposed in this paper to predict the dynamic bus travel time.
6. Conclusions
From the perspectives of time and space, the bus travel times of public transportation are dynamic/uncertain. The gap between a massive amount traffic data and its shallow features and the gap between full connection and rich features make it difficult to obtain representative features from datasets with rich features. The potential traffic state and traffic events belong to a hidden mode, so travel time prediction is a challenging problem of ITS. Therefore, it is of particular importance to develop a deep-seated architecture that fully reflects the characteristics of transit travel time.
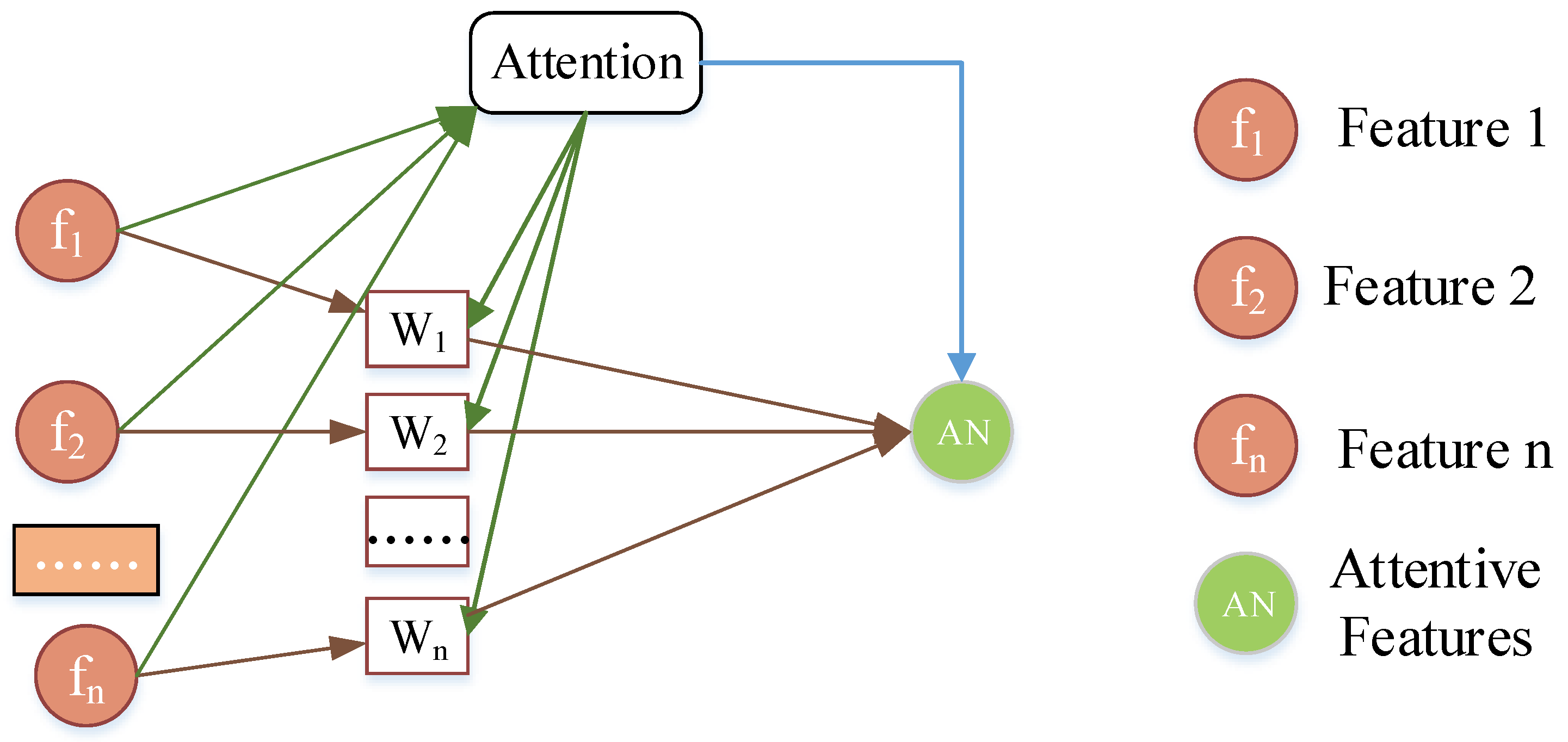
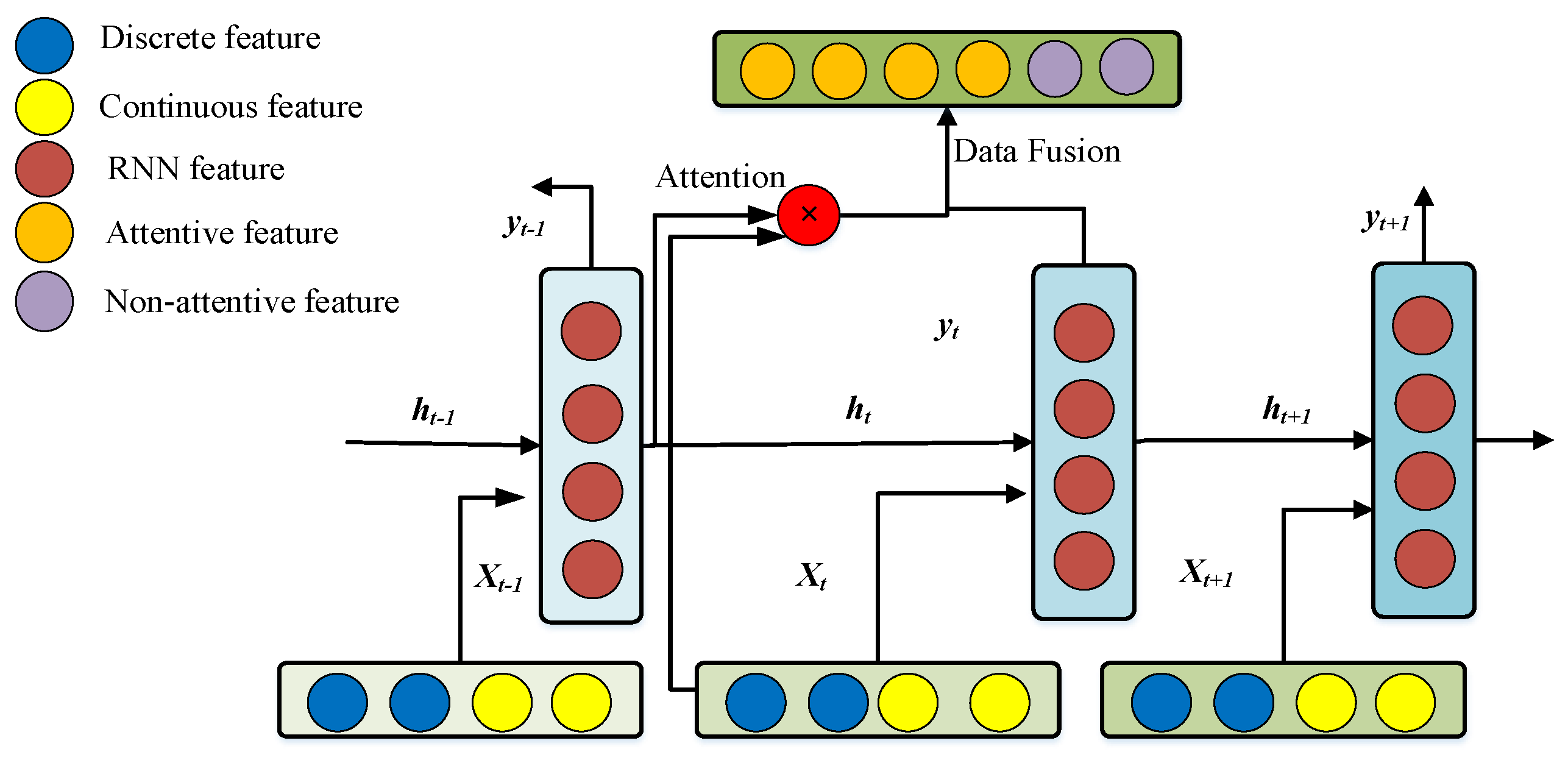
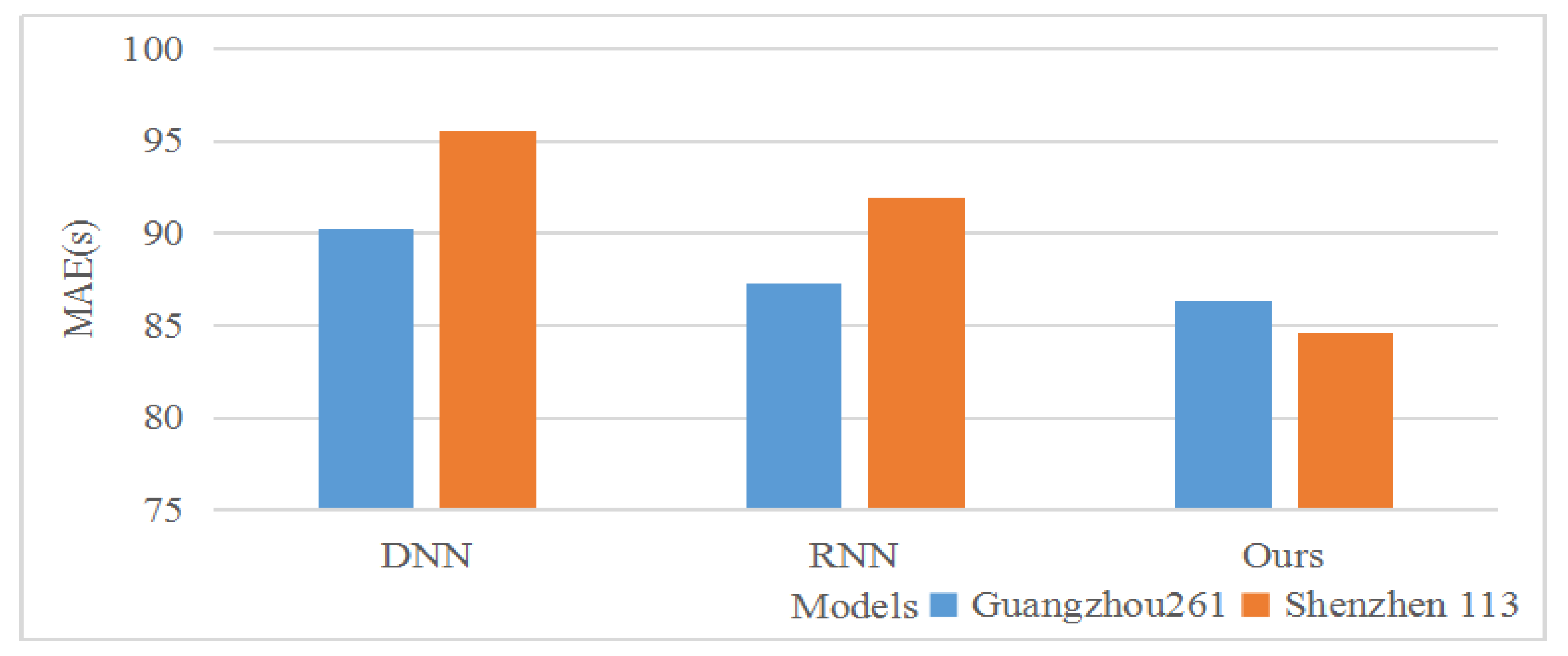
We proposed an embedded network lever WD structure to solve the spatial data and designed an attention mechanism for the RNN to capture the temporal information. Finally, the system used the deep neural network model composed of the RNN and the DNN. The model could capture the non-static spatiotemporal correlation of the urban bus travel time. This enabled the model to generalize the learning model in the cross-temporal and spatial prediction. The model could be used to predict the dynamic travel times of buses. Its effect was better than those of the historical average method, traditional SVR model, SVR-Bayes optimization model, single DNN [
5], and RNN [
6,
21], as shown in
Figure 7. The main contributions of this study were as follows.
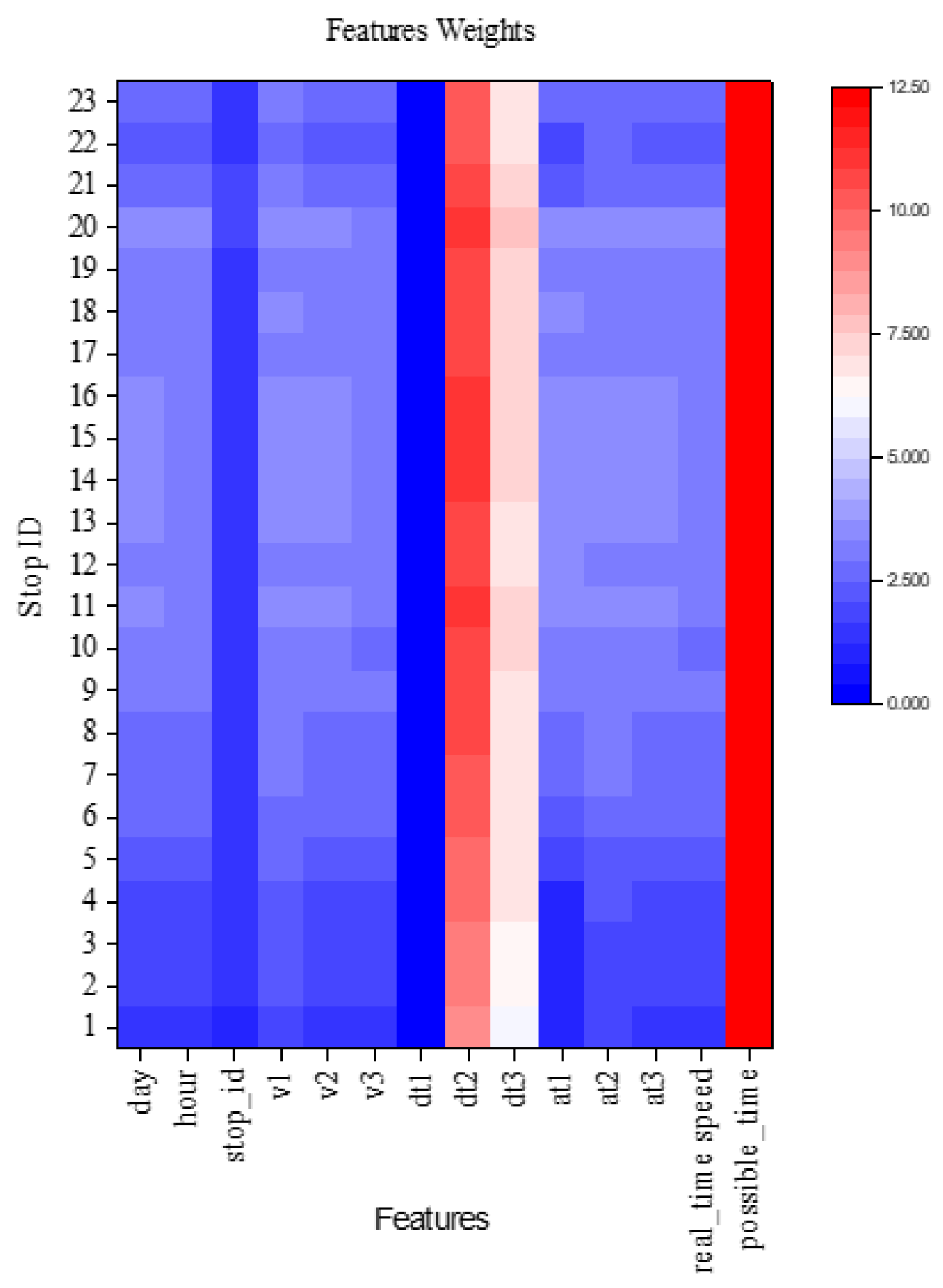
Based on the prediction of bus travel time, the study proposed a new heterogeneous feature extraction framework based on the RNN model of embedding, WD, and an attention mechanism in order to gain a deep understanding of the space-time features and intrinsic connections of the characteristics related to bus travel time, and to visualize these features and connections, as shown in
Table 7 and
Table 8,
Figure 9.
Fourteen historical spatial and temporal features were introduced, including the stop IDs as spatial features, bus dwelling times at different historical stages, and real-time GPS bus speeds with real-time possible transit times obtained based on real-time bus speeds as temporal features as shown in
Table 2. Especially, the real-time bus speeds is important to improve the dynamic bus travel time prediction, which can be seen in
Table 6. These features have not been studied together in previous studies
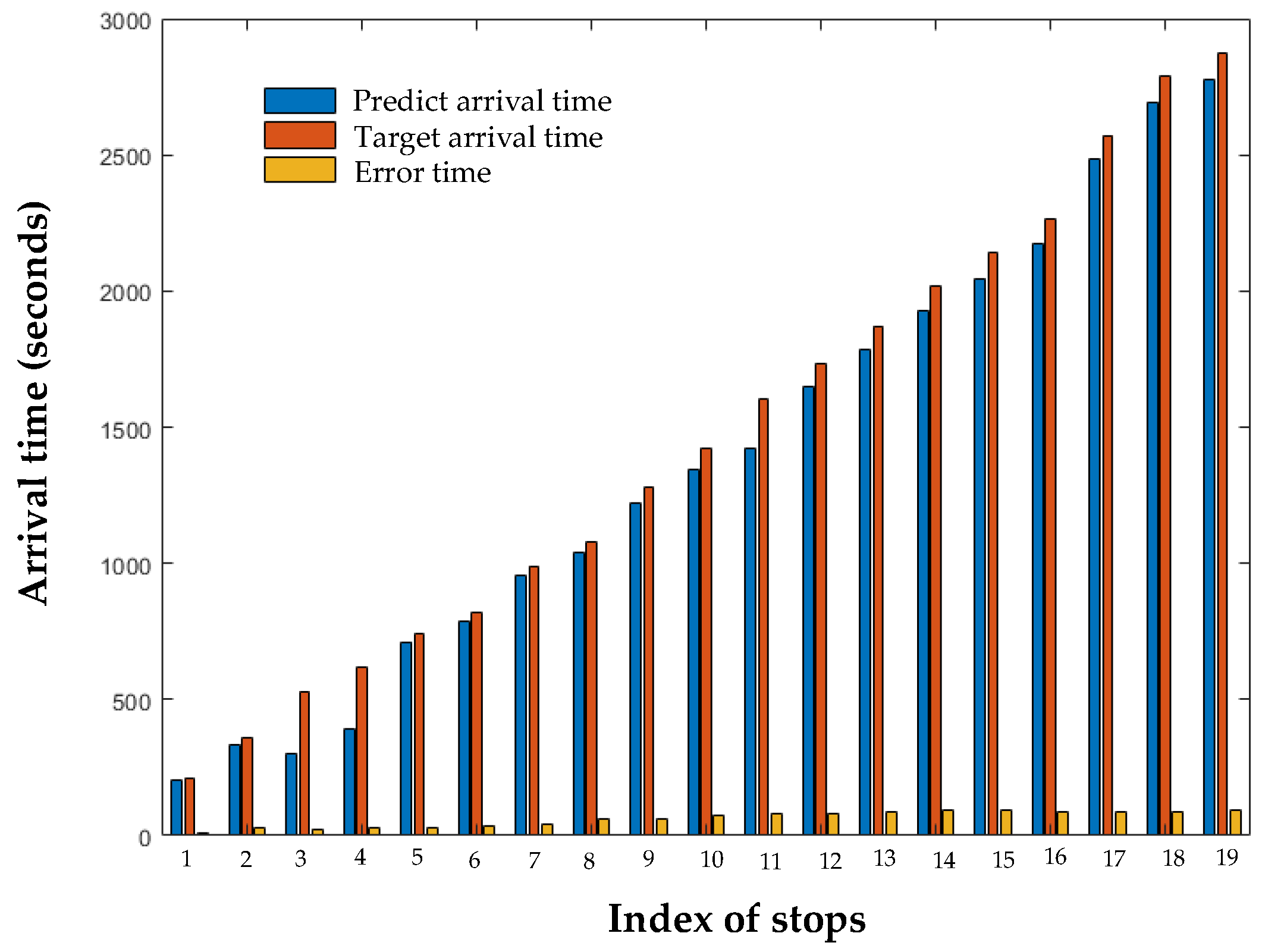
The multiple super composition of the RNN and DNNs were carried out to reduce the residual heterogeneous data fusion and real-time dynamic bus travel time prediction. A new scheme for real-time dynamic bus travel time prediction was provided as shown in
Figure 7 and
Figure 8.
To verify the model’s stability and generalization ability, the model was tested on the data sets of the Guangzhou 226 bus and the Shenzhen 113 bus. The buses ran on the main roads in big cities. Both of the experiments achieved good results. Few of the existing studies tested their models in different cities as shown in
Figure 7 and
Table 5.
For future work, our study will keep exploring the presented systems in the following directions. In addition to further improving the accuracy of the model, we will extend from one bus line to the bus lines of the entire road network. The existing models tested individual bus routes. The comparison can prove the validity of the model, but our study hold the point that more factors need to be considered. Therefore, it is a feasible choice to try to input the entire road network as a model. With the development of in-deep learning technology, this effect can be achieved through a deep image convolution network of reference image processing [
42], which is an important direction of our future research. The effect of missing data on the prediction is obvious. When the missing rate was more than 5%, the performance of the model decreased significantly when only speed was used as the input. When using the multi-attribute fusion, the model had good performance, not only when the error value was low but also when the error growth rate was low, particularly when compared with the model of Liu et al. (2018) [
10]. In this research, the missing data were not considered thoroughly enough. In the future, more kinds of sensors (such as ground loops, videos, and geomagnetism) can be considered in order to repair the missing data and to further improve the accuracy.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}