Real-Time Image Stabilization Method Based on Optical Flow and Binary Point Feature Matching

Abstract
:1. Introduction
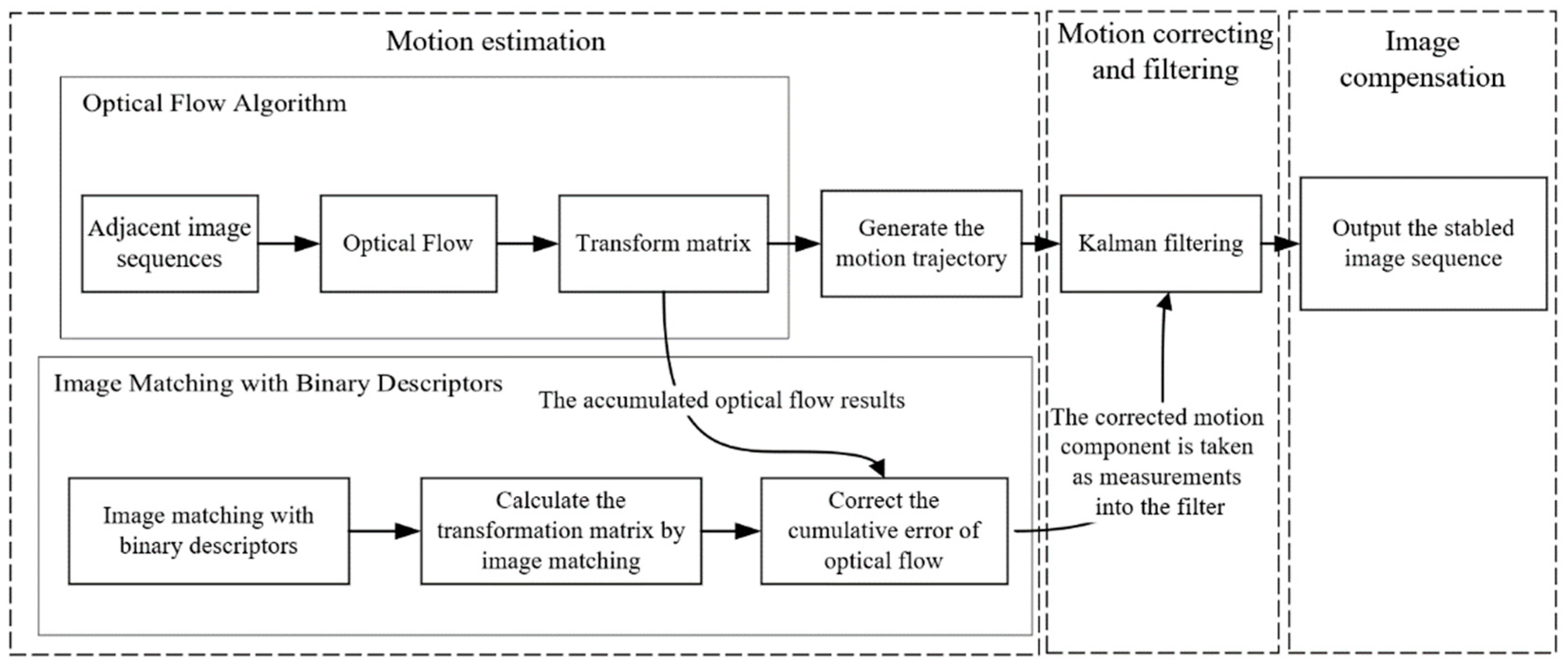
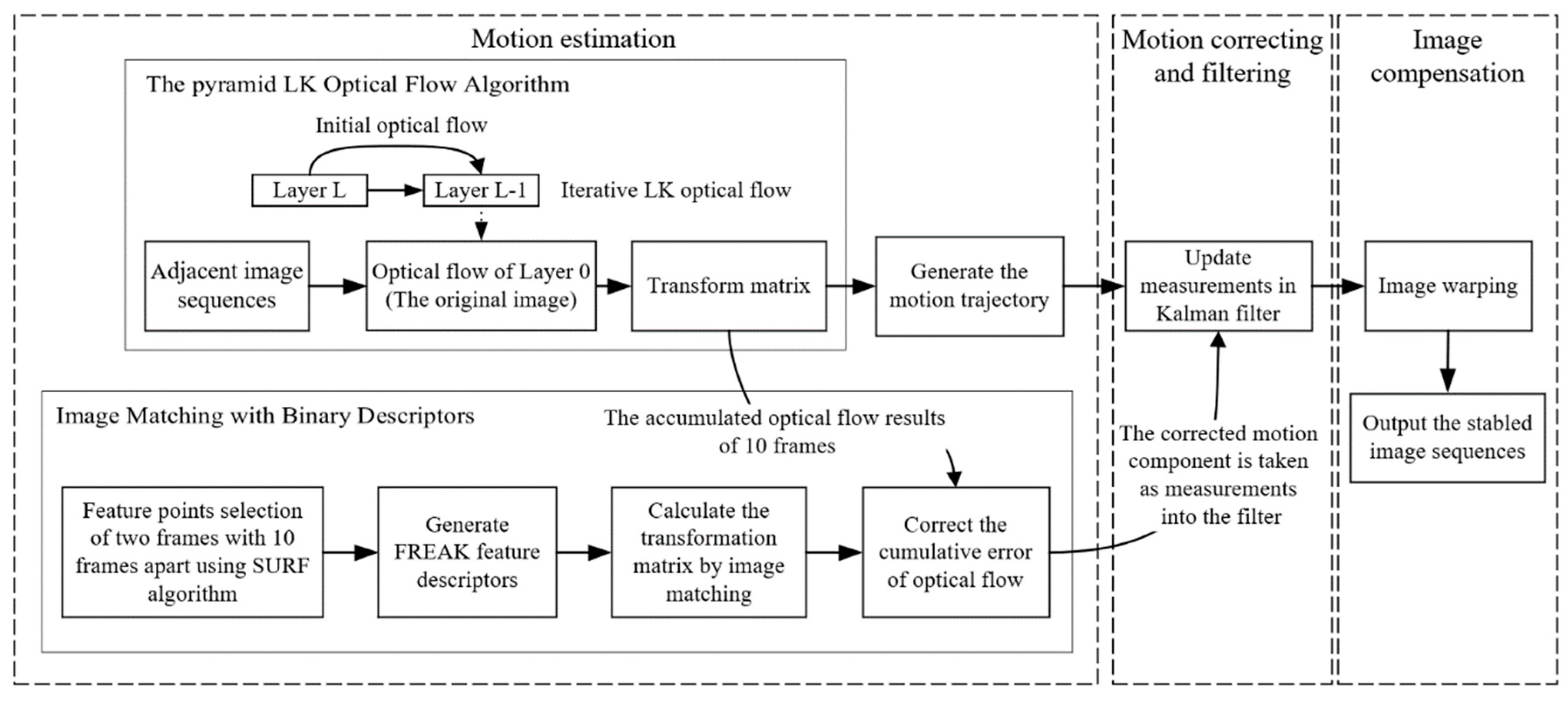
2. Proposed Framework
3. Global Motion Estimation
4. Motion Trajectory Correction and Filtering Based on Binary Feature Descriptors Matching
4.1. Trajectory Correction Based on FREAK Feature Descriptor
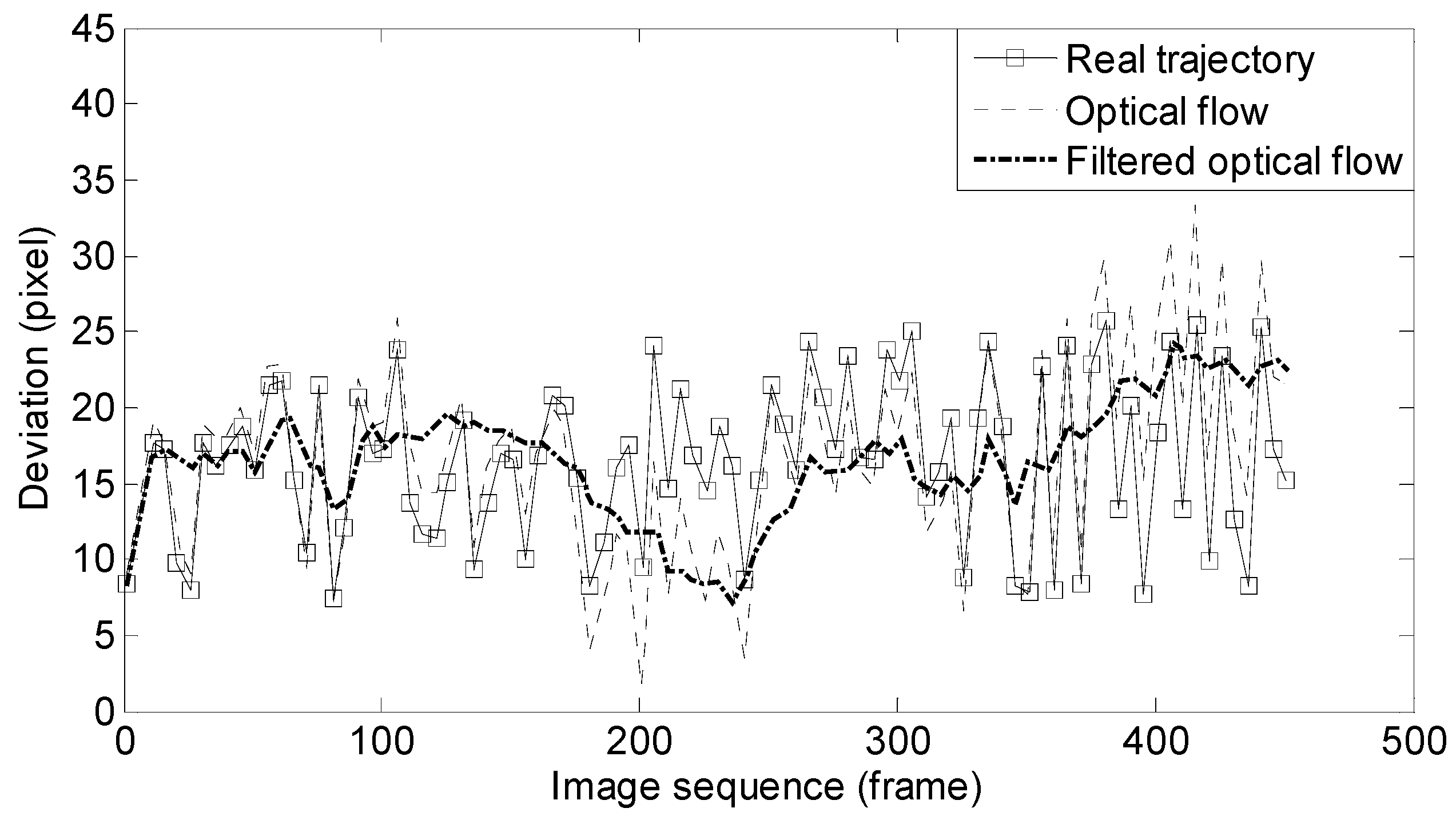
4.2. Motion Trajectory Filtering Based on Kalman Filter
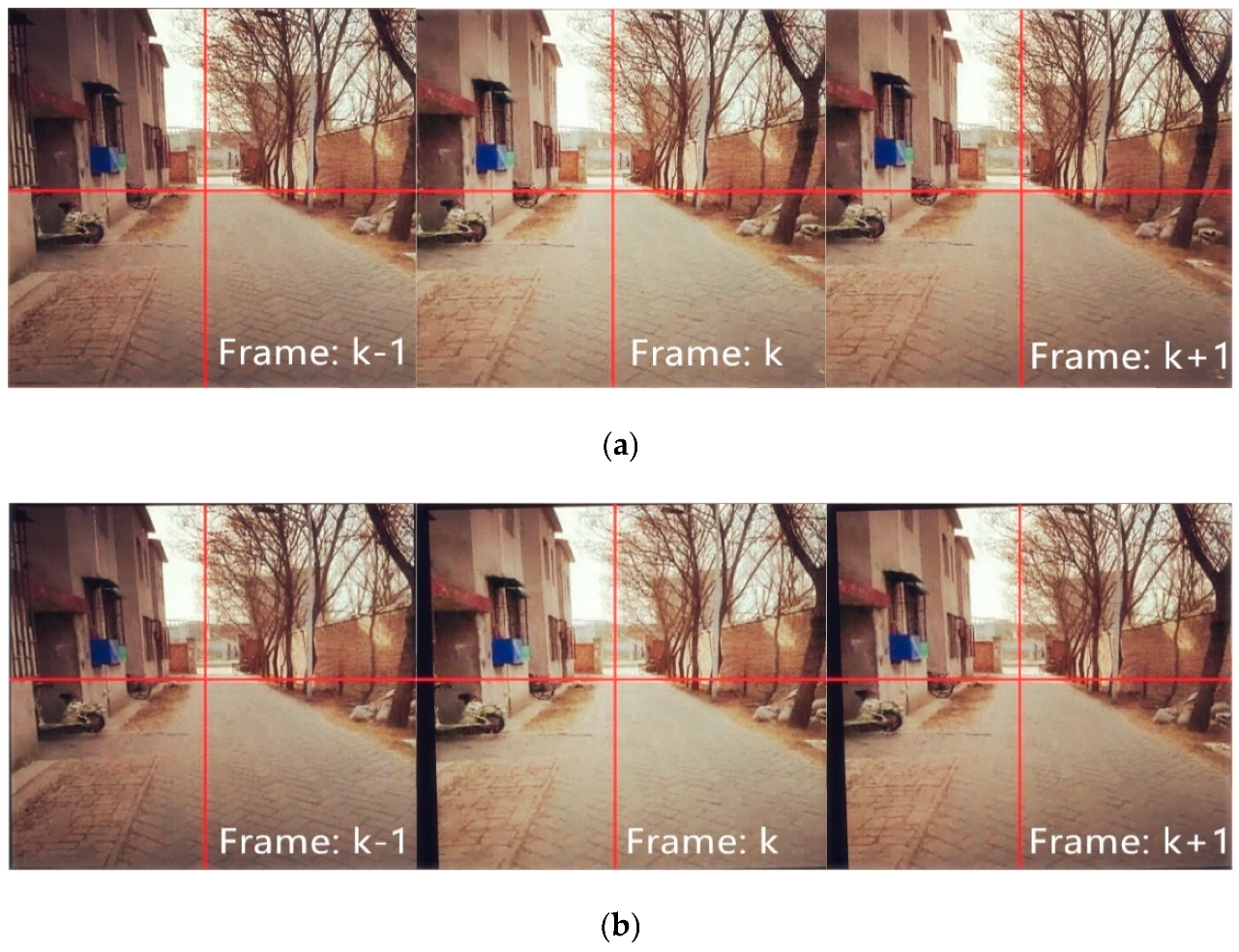
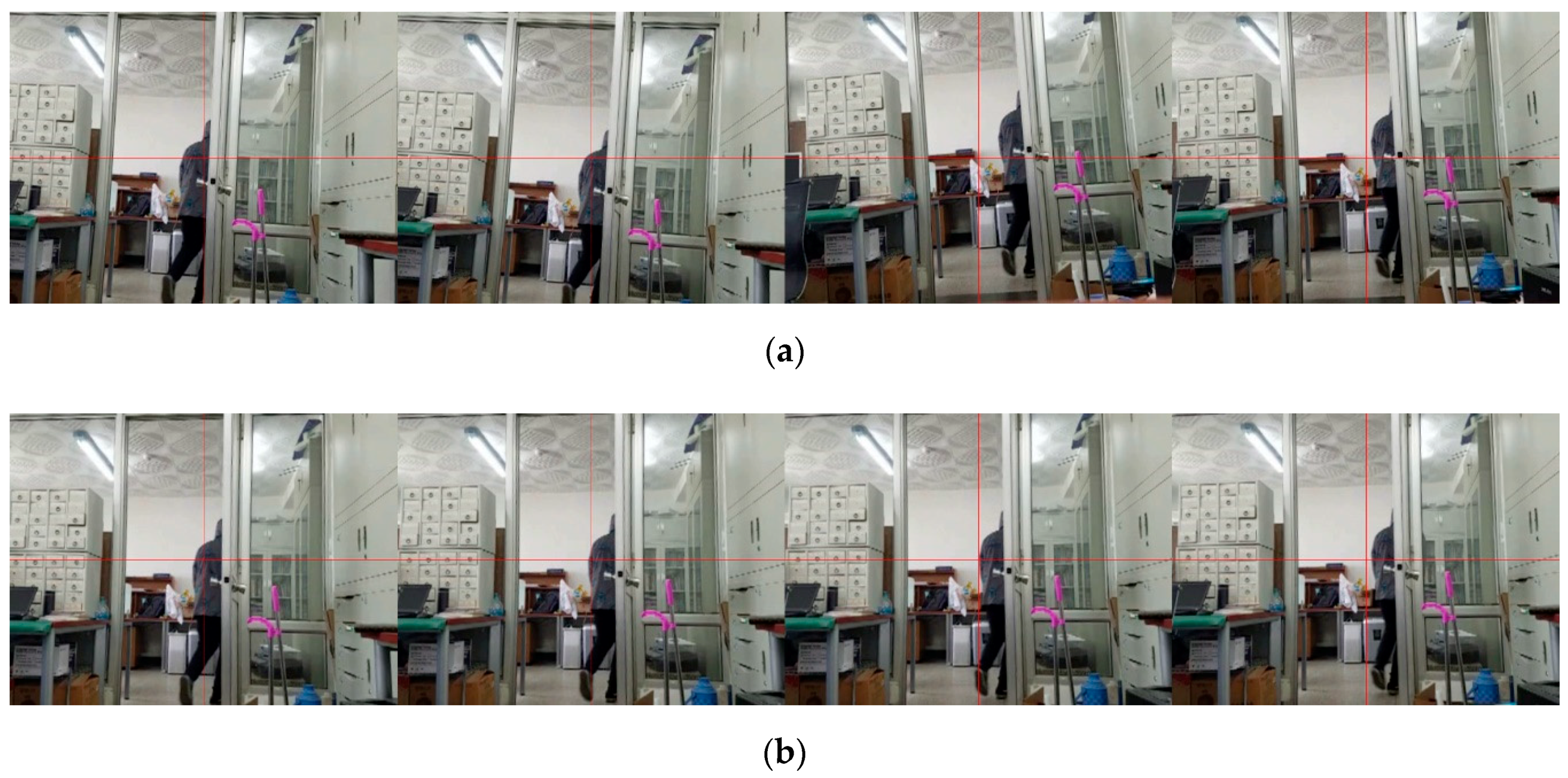
5. Experimental Results
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Felix, S. US Navy Spike Missile System: A new Generation of Miniature Precision Guided Weapons; Naval Air Warfare Center Weapons DIV China Lake: Ridgecrest, CA, USA, 2006. [Google Scholar]
- Rudin, R.T. Strapdown Stabilization for Imaging Seekers. In Proceedings of the 2nd Annual AIAA and SDIO Interceptor Technology Conference, China Lake, CA, USA, 6–9 June 1993. [Google Scholar]
- Özkan, B.; Uçar, A. Comparison of the strapdown and gimbaled seekers utilized in aerial applications. In Proceedings of the Conference on Infrared Technology and Applications XXXVIII, Baltimore, MD, USA, 23–27 April 2012; Volume 8353. [Google Scholar]
- Yuan, Y.; Yang, X.; Wu, W.; Li, H.; Liu, Y. A fast single-image super-resolution method implemented with CUDA. J. Real Time Image Process. 2018, 16, 81–97. [Google Scholar] [CrossRef]
- Georgis, G.; Lentaris, G.; Reisis, D.I. Acceleration techniques and evaluation on multi-core CPU, GPU and FPGA for image processing and super-resolution. J. Real Time Image Process. 2016, 16, 1207–1234. [Google Scholar] [CrossRef] [Green Version]
- Yang, W.; Zhang, Z.; Zhang, Y.; Lu, X.; Li, J.; Shi, Z. A real-time gray projection algorithm for electronic image stabilization. In Proceedings of the SPIE 8193, International Symposium on Photoelectronic Detection and Imaging 2011: Advances in Infrared Imaging and Applications, Beijing, China, 8 September 2011. [Google Scholar]
- Tian, S.; Zhao, P.; Wang, N.; Wang, C. Aims at moving objects’ improvement based on gray projection of algorithm of the electronic image stabilization. In Proceedings of the 2010 3rd International Congress on Image and Signal Processing, Yantai, China, 16–18 October 2010; Volume 5, pp. 2483–2487. [Google Scholar]
- Vella, F.; Castorina, A.; Mancuso, M.; Messina, G. Digital image stabilization by adaptive block motion vectors filtering. IEEE Trans. Consum. Electron. 2002, 48, 796–801. [Google Scholar] [CrossRef]
- Zhu, S.; Ma, K. A new diamond search algorithm for fast block-matching motion estimation. IEEE Trans. Image Process. A Publ. IEEE Signal Process. Soc. 2000, 9, 287–290. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.; Lee, K.; Ko, S.C. Digital Image Stabilizing Algorithms Based on Bit-plane Matching. In Proceedings of the International 1998 Conference on Consumer Electronics, Los Angeles, CA, USA, 2–4 June 1998; pp. 126–127. [Google Scholar]
- Ko, S.; Lee, S.; Jeon, S. Fast digital image stabilizer based on Gray-coded bit-plane matching. 1999 Digest of Technical Papers. In Proceedings of the International Conference on Consumer Electronics, Los Angeles, CA, USA, 22–24 June 1999; pp. 90–91. [Google Scholar]
- Beauchemin, S.S.; Barron, J.L. The Computation of Optical Flow. ACM Comput. Surv. (CSUR) 1995, 27, 433–467. [Google Scholar] [CrossRef]
- Chui, H.; Rangarajan, A. A new point matching algorithm for non-rigid registration. Comput. Vision Image Underst. 2003, 89, 114–141. [Google Scholar] [CrossRef]
- Battiato, S.; Gallo, G.; Puglisi, G.; Scellato, S. SIFT Features Tracking for Video Stabilization. In Proceedings of the 14th International Conference on Image Analysis and Processing (ICIAP 2007), Modena, Italy, 10–14 September 2007; pp. 825–830. [Google Scholar]
- Lowe, D.G. Object Recognition from Local Scale-Invariant Features. In Proceedings of the Seventh IEEE International Conference on Computer Vision, Kerkyra, Greece, 20–25 September 1999; pp. 1150–1157. [Google Scholar]
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Bay, H.; Ess, A.; Tuytelaars, T.; Gool, L.V. Speeded-up robust features (surf). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Cheng, X.; Hao, Q.; Xie, M. A Comprehensive Motion Estimation Technique for the Improvement of EIS Methods Based on the SURF Algorithm and Kalman Filter. Sensors 2016, 16, 486. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pinto, B.; Anurenjan, P.R. Video stabilization using Speeded Up Robust Features. In Proceedings of the 2011 International Conference on Communications and Signal Processing, Calicut, India, 10–12 February 2011; pp. 527–531. [Google Scholar]
- Calonder, M.; Lepetit, V.; Strecha, C.; Fua, P. BRIEF: Binary Robust Independent Elementary Features. In Lecture Notes in Computer Science, Proceedings of the Computer Vision—ECCV 2010, 11th European Conference on Computer Vision, Heraklion, Crete, Greece, 5–11 September 2010; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Leutenegger, S.; Chli, M.; Siegwart, R.Y. BRISK: Binary Robust invariant scalable keypoints. In Proceedings of the International Conference on Computer Vision. IEEE Computer Society, Barcelona, Spain, 6–13 November 2011; pp. 2548–2555. [Google Scholar]
- Alahi, A.; Ortiz, R.; Vandergheyns, P. FREAK: Fast Retina Keypoint. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 510–517. [Google Scholar]
- Dong, J.; Liu, H. Video Stabilization for Strict Real-Time Applications. IEEE Trans. Circuits Syst. Video Technol. 2017, 27, 716–724. [Google Scholar] [CrossRef]
- Lim, A.; Ramesh, B.; Yue, Y.; Cheng, X.; Zhi, G.; Feng, L. Real-time optical flow-based video stabilization for unmanned aerial vehicles. J. Real Time Image Process. 2019, 16, 1975–1985. [Google Scholar] [CrossRef] [Green Version]
- Hu, W.; Chen, C.; Chen, T.; Peng, M.; Su, Y. Real-time video stabilization for fast-moving vehicle cameras. Multimed. Tools Appl. 2016, 77, 1237–1260. [Google Scholar] [CrossRef]
- Derpanis, K.G. Overview of the RANSAC Algorithm; Department of Computer Science and Engineering, York University: Toronto, ON, Canada, 2010; Volume 1, p. 2. [Google Scholar]
- Fischler, M.A.; Bolles, R.C. Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Lucas, B.D.; Kanade, T. An iterative image registration technique with an application to stereo vision. Int. Jt. Conf. Artif. Intell. (IJCAI) 1981, 81, 674–679. [Google Scholar]
- Thota, S.D.; Vemulapalli, K.S.; Chintalapati, K.; Gudipudi, P.S.S. Comparison Between the Optical Flow Computational Techniques. Int. J. Eng. Trends Technol. (IJETT) 2013, 4, 4507–4511. [Google Scholar]
- Liu, H.; Hong, T.H.; Herman, M.; Camus, T.; Chellappa, R. Accuracy vs efficiency trade-offs in optical flow algorithms. Comput. Vis. Image Underst. 1998, 72, 271–286. [Google Scholar] [CrossRef]
- Bouguet, J.Y. Pyramidal implementation of the affine Lucas Kanade feature tracker description of the algorithm. Intell. Corp. 2001, 5, 4. [Google Scholar]
- Chatoux, H.; Lecellier, F.; Fernandez-Maloigne, C. Comparative study of descriptors with dense key points. In Proceedings of the 23rd International Conference on Pattern Recognition (ICPR), Cancun, Mexico, 4–8 December 2016. [Google Scholar]
- Heinly, J.; Dunn, E.; Frahm, J.M. Comparative Evaluation of Binary Features. In Lecture Notes in Computer Science, Proceedings of the 2012 European Conference on Computer Vision (ECCV), Florence, Italy, 7–13 October 2012; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Bekele, D.; Teutsch, M.; Schuchert, T. Evaluation of binary keypoint descriptors. In Proceedings of the 2013 IEEE International Conference on Image Processing, Melbourne, VIC, Australia, 15–18 September 2013; pp. 3652–3656. [Google Scholar]
- Deshaker Method. Available online: http://www.guthspot.se/video/deshaker.html (accessed on 14 September 2014).
- Video Figures. Available online: http://web.cecs.pdx.edu/~fliu/project/3dstab.htm (accessed on 15 June 2019).
- Simple. Available online: http://liushuaicheng.org/SIGGRAPH2013/database.html (accessed on 18 June 2019).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Video Case | 1 (720 × 720 Pixel) | 2 (640 × 480 Pixel) | 3 (480 × 480 Pixel) | 4 (360 × 360 Pixel) | |
|---|---|---|---|---|---|
| Algorithms | |||||
| SIFT | 667 | 424 | 336 | 313 | |
| SURF | 127 | 80 | 64 | 40 | |
| FREAK | 105 | 60 | 51 | 32 | |
| Pyramid LK Optical Flow | 27 | 18 | 13 | 9 | |
| 0004TU | 2WL | |
|---|---|---|
| Original | 19.5356 | 17.6181 |
| Deshaker | 22.0803 | 21.1841 |
| Hu et al. | 20.43 | 19.30 |
| Proposed method | 21.9681 | 19.97 |
| 0004TU | 2WL | ||
|---|---|---|---|
| In our condition 1 | Deshaker | 55.5 | 54.25 |
| Proposd method | 46.3 | 48.0 | |
| In Hu’s condition 2 | Deshaker | 34.51 | 34.20 |
| Hu et al. | 31.01 | 30.07 |
| Video Name | Resolution | Total Number of Frames | Original Image Sequence (ITF) | Stabilized by Proposed Method (ITF) |
|---|---|---|---|---|
| 2 | 640 × 360 | 449 | 19.366389 | 23.760345 |
| 3 | 640 × 360 | 574 | 24.587738 | 27.230761 |
| 4 | 640 × 360 | 401 | 26.471917 | 26.996680 |
| 5 | 640 × 360 | 599 | 21.075880 | 22.299292 |
| 6 | 640 × 360 | 434 | 21.181671 | 23.129672 |
| 7 | 640 × 360 | 389 | 23.744771 | 24.069733 |
| 8 | 640 × 360 | 434 | 21.506194 | 25.739252 |
| 9 | 640 × 360 | 999 | 15.904668 | 17.523298 |
| 10 | 640 × 360 | 404 | 14.737232 | 16.787729 |
| 11 | 640 × 360 | 434 | 16.129186 | 21.106888 |
| 12 | 640 × 360 | 494 | 17.427601 | 21.500074 |
| 13 | 640 × 360 | 509 | 18.040385 | 20.447358 |
| 14 | 640 × 360 | 299 | 16.936780 | 21.077630 |
| 15 | 640 × 360 | 479 | 15.899816 | 20.115547 |
| 16 | 640 × 360 | 449 | 14.282314 | 18.031555 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, Z.; Yang, D.; Zhang, X.; Dong, Y.; Liu, C.; Shen, Q. Real-Time Image Stabilization Method Based on Optical Flow and Binary Point Feature Matching. Electronics 2020, 9, 198. https://doi.org/10.3390/electronics9010198
Deng Z, Yang D, Zhang X, Dong Y, Liu C, Shen Q. Real-Time Image Stabilization Method Based on Optical Flow and Binary Point Feature Matching. Electronics. 2020; 9(1):198. https://doi.org/10.3390/electronics9010198
Chicago/Turabian StyleDeng, Zilong, Dongxiao Yang, Xiaohu Zhang, Yuguang Dong, Chengbo Liu, and Qiang Shen. 2020. "Real-Time Image Stabilization Method Based on Optical Flow and Binary Point Feature Matching" Electronics 9, no. 1: 198. https://doi.org/10.3390/electronics9010198