Robust Current Predictive Control-Based Equivalent Input Disturbance Approach for PMSM Drive


Abstract
:1. Introduction
2. Mathematical Model of PMSM
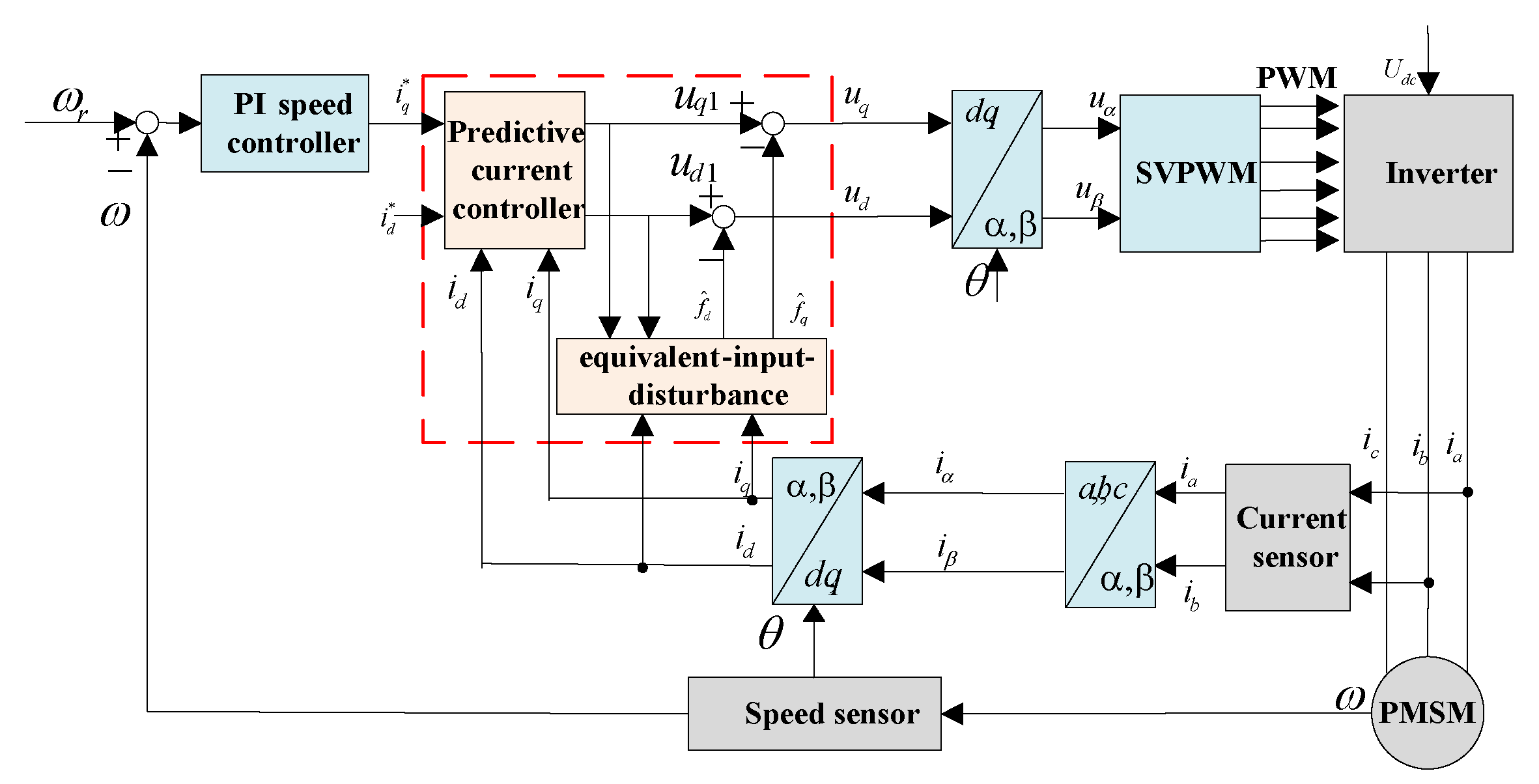
3. Current Control Scheme for PMSM
3.1. Deadbeat Predictive Current Controller for Pmsm
3.2. Disturbance Observer Based on EID
4. Simulation and Experiment
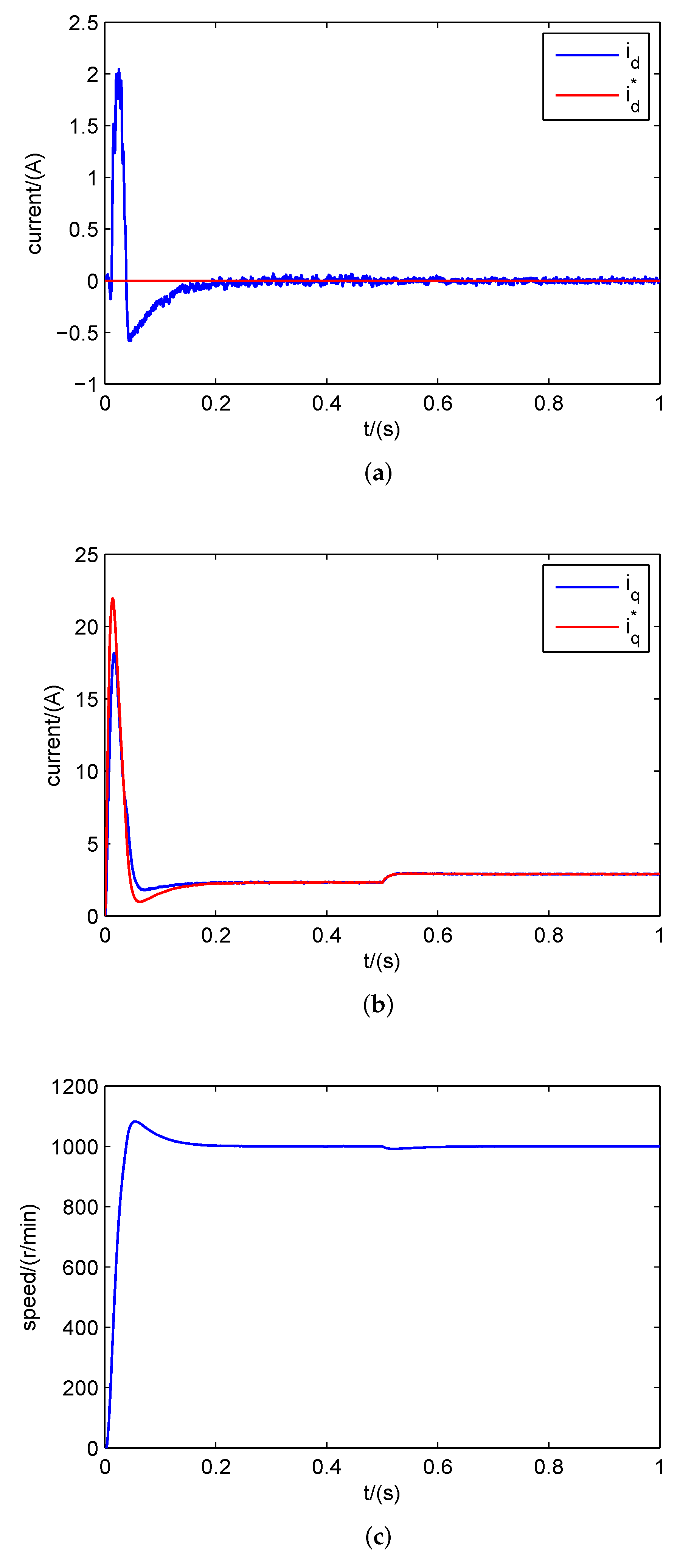
4.1. Simulation and Analysis
4.2. Experiment and Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Liu, X.; Yu, H.; Yu, J.; Zhao, L. Combined speed and current terminal sliding mode control with nonlinear disturbance observer for PMSM drive. IEEE Access 2018, 6, 29594–29601. [Google Scholar] [CrossRef]
- Ren, J.; Ye, Y.; Xu, G.; Zhao, Q. Uncertainty-and-disturbance-estimator-based current control scheme for PMSM drives with a simple parameter tuning algorithm. IEEE Trans. Ind. Electron. 2017, 32, 5712–5722. [Google Scholar]
- Qian, J.; Ji, C.; Pan, N.; Wu, J. Improved sliding mode control for permanent magnet synchronous motor speed regulation system. Appl. Sci. 2018, 8, 2491. [Google Scholar] [CrossRef]
- Merabet, A.; Tanvir, A.; Beddek, K. Torque and state estimation for real-time implementation of multivariable control in sensorless induction motor drives. IET Electr. Power Appl. 2017, 11, 653–663. [Google Scholar] [CrossRef]
- Yang, X.; Yu, J.; Wang, Q.; Zhao, L. Adaptive fuzzy finite-time command filtered tracking control for permanent magnet synchronous motors. Neurocomputing 2019, 337, 110–119. [Google Scholar] [CrossRef]
- He, L.; Wang, F.; Wang, J.; Rodriguez, J. Zynq implemented lunenberger disturbance observer based predictive control scheme for PMSM drives. IEEE Trans. Power Electron. 2019. [Google Scholar] [CrossRef]
- Liu, X.; Yu, H.; Yu, J.; Zhao, Y. A novel speed control method based on port-controlled hamiltonian and disturbance observer for PMSM drives. IEEE Access 2019, 7, 111115–111123. [Google Scholar] [CrossRef]
- Merabet, A.; Labib, L.; Ghias, A. Robust model predictive control for photovoltaic inverter system with grid fault ride-through capability. IEEE Trans. Smart Grid 2018, 9, 5699–5709. [Google Scholar] [CrossRef]
- Kouro, S.; Cortes, P.; Vargas, C.; Ammann, U. Model predictive control—a simple and powerful method to control power converters. IEEE Trans. Ind. Electron. 2008, 56, 1826–1838. [Google Scholar] [CrossRef]
- Turker, T.; Buyukkeles, U.; Bakan, A. A robust predictive current controller for PMSM drives. IEEE Trans. Ind. Electron. 2016, 63, 3906–3914. [Google Scholar] [CrossRef]
- Guo, X.; Du, S.; Li, Z.; Chen, F. Analysis of current predictive control algorithm for permanent magnet synchronous motor based on three-level inverters. IEEE Access 2019, 7, 87750–87759. [Google Scholar] [CrossRef]
- Chai, S.; Wang, L.; Rogers, E. A cascade MPC control structure for a PMSM with speed ripple minimization. IEEE Trans. Ind. Electron. 2013, 60, 2978–2987. [Google Scholar] [CrossRef]
- Zhang, G.; Chen, C.; Gu, X.; Zhang, Z. An improved model predictive torque control for a two-level inverter fed interior permanent magnet synchronous motor. Electronics 2019, 8, 769. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, L.; Zhang, Y. Model predictive current control for PMSM drives with parameter robustness improvement. IEEE Trans. Power Electron. 2019, 34, 1645–1657. [Google Scholar] [CrossRef]
- Luo, Y.; Liu, C. A simplified model predictive control for a dual three-phase PMSM with reduced harmonic currents. IEEE Trans. Ind. Electron. 2018, 65, 9079–9089. [Google Scholar] [CrossRef]
- Zhang, X.; Hou, B.; Mei, Y. Deadbeat predictive current control of permanent magnet synchronous motors with stator current and disturbance observer. IEEE Trans. Power Electron. 2016, 32, 3818–3834. [Google Scholar] [CrossRef]
- Chen, W.; Yang, J.; Guo, L.; Li, S. Disturbance-observer-based control and related methods-an overriew. IEEE Trans. Ind. Electron. 2016, 63, 1083–1095. [Google Scholar] [CrossRef]
- Yang, J.; Chen, W.; Li, S.; Guo, L. Disturbance/uncertainty estimation and attenuation techniques in PMSM drives—A survey. IEEE Trans. Ind. Electron. 2017, 64, 3273–3285. [Google Scholar] [CrossRef]
- Sun, Z.; Guo, T.; Yan, Y.; Wang, X. A composite current-constrained control for permanent magnet synchronous motor with time-varying disturbance. Adv. Mech. Eng. 2017, 9, 1–13. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, C.; Li, K.; Zhang, Q. Speed control for permanent magnet synchronous motor based on an improved extended state observer. ISA Trans. 2017, 71, 542–552. [Google Scholar] [CrossRef]
- Turker, T.; Yanik, G.; Buyukkeles, U.; Mese, E. A discrete-time nonlinear robust controller for current regulation in PMSM drives. J. Electr. Eng. Technol. 2017, 12, 1921–1931. [Google Scholar]
- Niu, L.; Yang, M.; Wang, G.; Xu, D. Research on the robust current control algorithm of permanent magnet synchronous motor based on deadbeat control principle. Proc. CSCC 2012, 33, 78–85. [Google Scholar]
- Wang, W.; Xiao, X. Research on predictive control for PMSM based on online parameter identification. In Proceedings of the 38th IEEE Industrial Electronics Society Annual Conference, Glendale, AZ, USA, 7–10 November 2010; pp. 1982–1986. [Google Scholar]
- Jiang, Y.; Xu, W.; Mu, C.; Liu, Y. Improved deadbeat predictive current control combined sliding mode strategy for PMSM drive system. IEEE Trans. Veh. Technol. 2018, 67, 251–263. [Google Scholar] [CrossRef]
- Mohamed, Y.; EI-Saadany, E. Robust high bandwidth discrete-time predictive current control with predictive internal model-a unified approach for voltage-source PWM converters. IEEE Trans. Ind. Electron. 2008, 23, 126–136. [Google Scholar] [CrossRef]
- Yang, M.; Liang, X.; Long, J.; Xu, D. Flux immunity robust predictive current control with incremental model and extended state observer for PMSM drive. IEEE Trans. Power Electron. 2017, 23, 9267–9279. [Google Scholar] [CrossRef]
- Yang, R.; Wang, M.; Li, L.; Zhang, C. Robust predictive current control with variable-gain adaptive disturbance observer for PMLSM. IEEE Access 2018, 6, 13158–13169. [Google Scholar] [CrossRef]
- Du, Y.; Cao, W.; Wu, M.; She, J. Disturbance rejection and control system design using improved equivalent- input-disturbance approach. IEEE Trans. Ind. Electron. 2019. [Google Scholar] [CrossRef]
- Liu, R.; Liu, G.; Wu, M. Robust disturbance rejection based on equivalent-input-disturbance approach. IET Control Theory Appl. 2013, 7, 1261–1268. [Google Scholar] [CrossRef]
- Gao, F.; Wu, M.; She, J. Disturbance rejection in nonlinear systems based on equivalent-input-disturbance approach. Appl. Math. Comput. 2016, 282, 244–253. [Google Scholar] [CrossRef]
- She, J.; Fang, M.; Ohyama, Y. Improving disturbance-rejection performance based on an Equivalent-Input- Disturbance approach. IEEE Trans. Ind. Electron. 2008, 55, 380–389. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Value | Unit |
|---|---|---|
| rated speed | 3000 | r/min |
| rated torque | 2.3 | N·m |
| resistance | 4.8 | |
| d-axes inductance | 19.5 | mH |
| q-axes inductance | 27.5 | mH |
| rotor flux | 0.15 | Wb |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Zhang, Q. Robust Current Predictive Control-Based Equivalent Input Disturbance Approach for PMSM Drive. Electronics 2019, 8, 1034. https://doi.org/10.3390/electronics8091034
Liu X, Zhang Q. Robust Current Predictive Control-Based Equivalent Input Disturbance Approach for PMSM Drive. Electronics. 2019; 8(9):1034. https://doi.org/10.3390/electronics8091034
Chicago/Turabian StyleLiu, Xudong, and Qi Zhang. 2019. "Robust Current Predictive Control-Based Equivalent Input Disturbance Approach for PMSM Drive" Electronics 8, no. 9: 1034. https://doi.org/10.3390/electronics8091034