Magnetic Switching of a Stoner-Wohlfarth Particle Subjected to a Perpendicular Bias Field

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Model
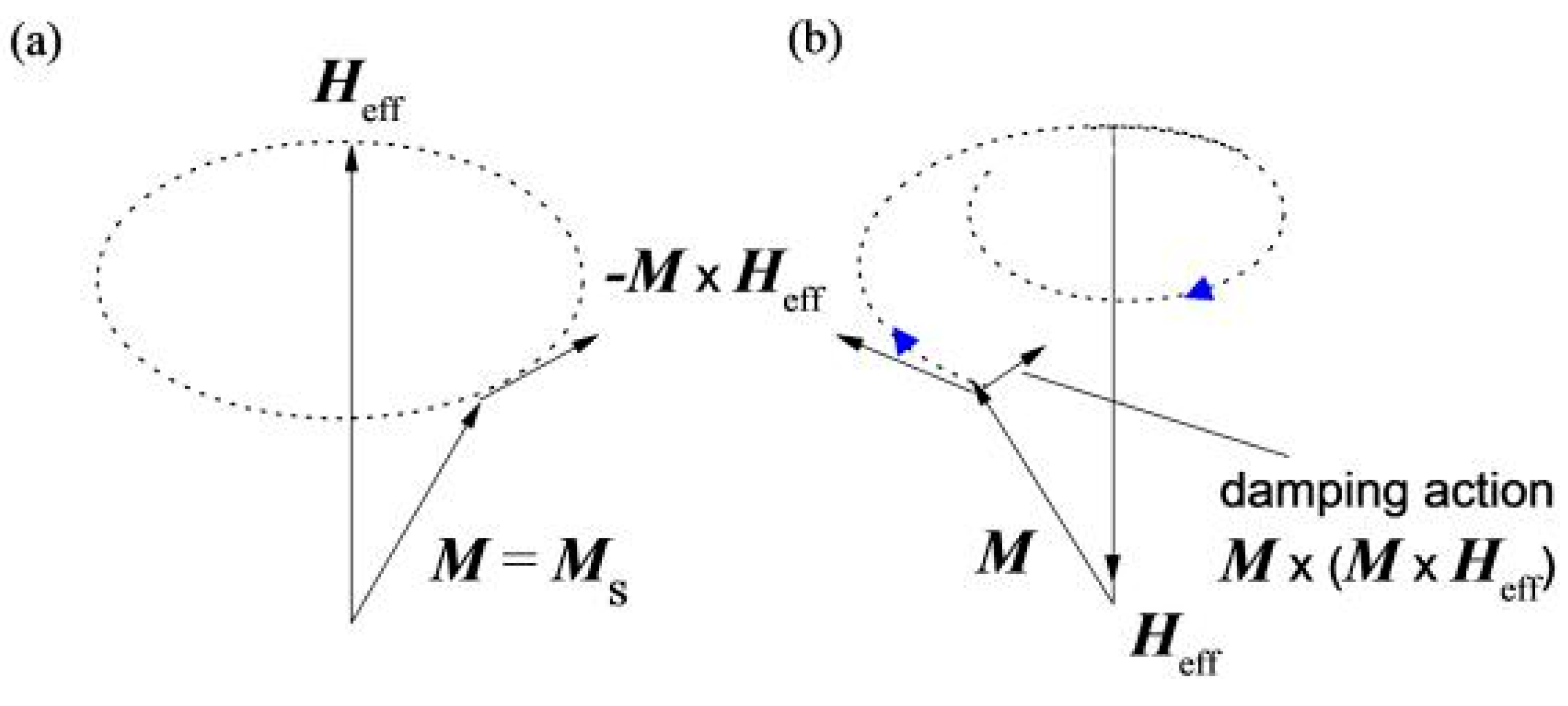
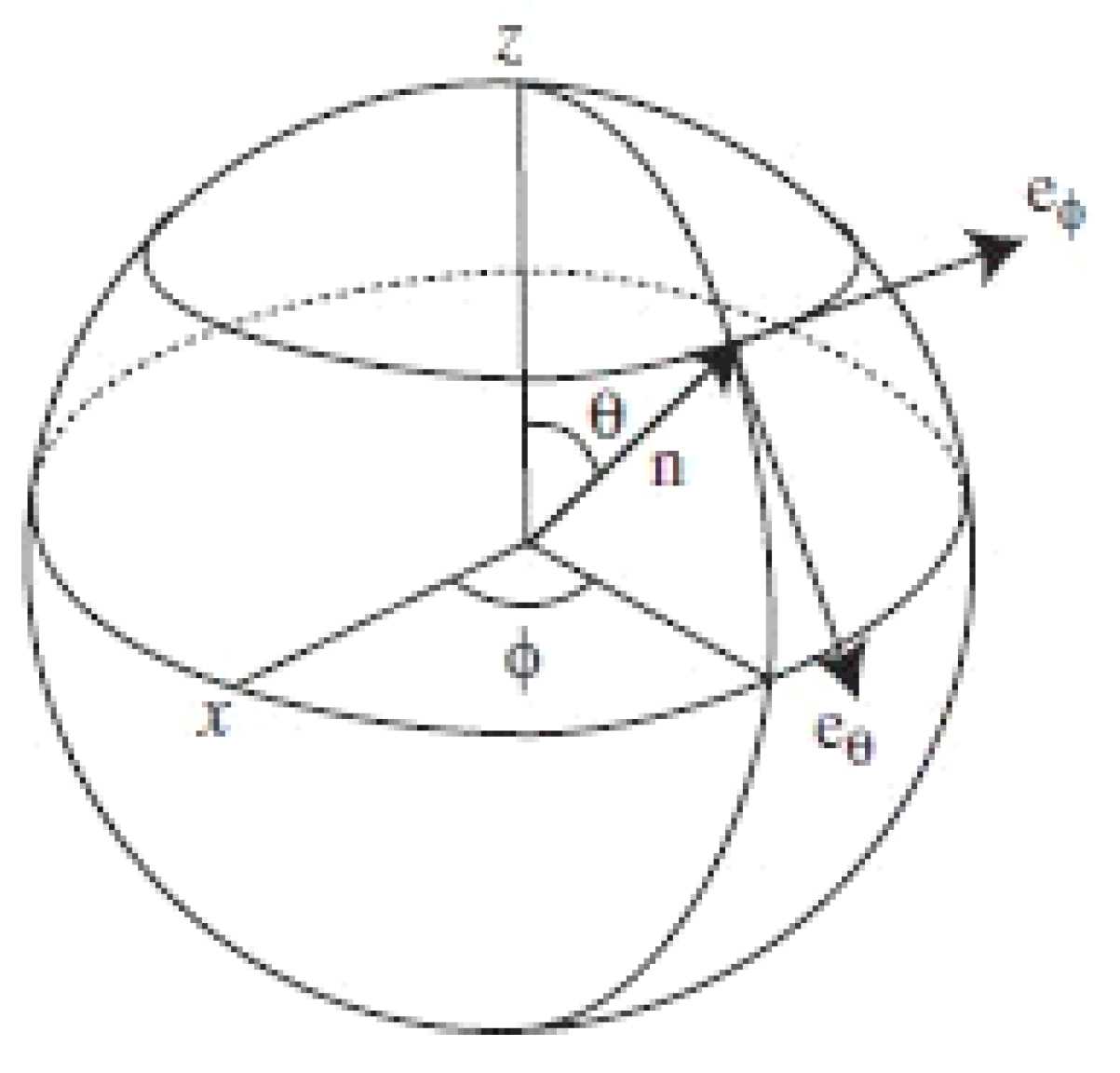
2.1. Magnetic Moment Dynamics
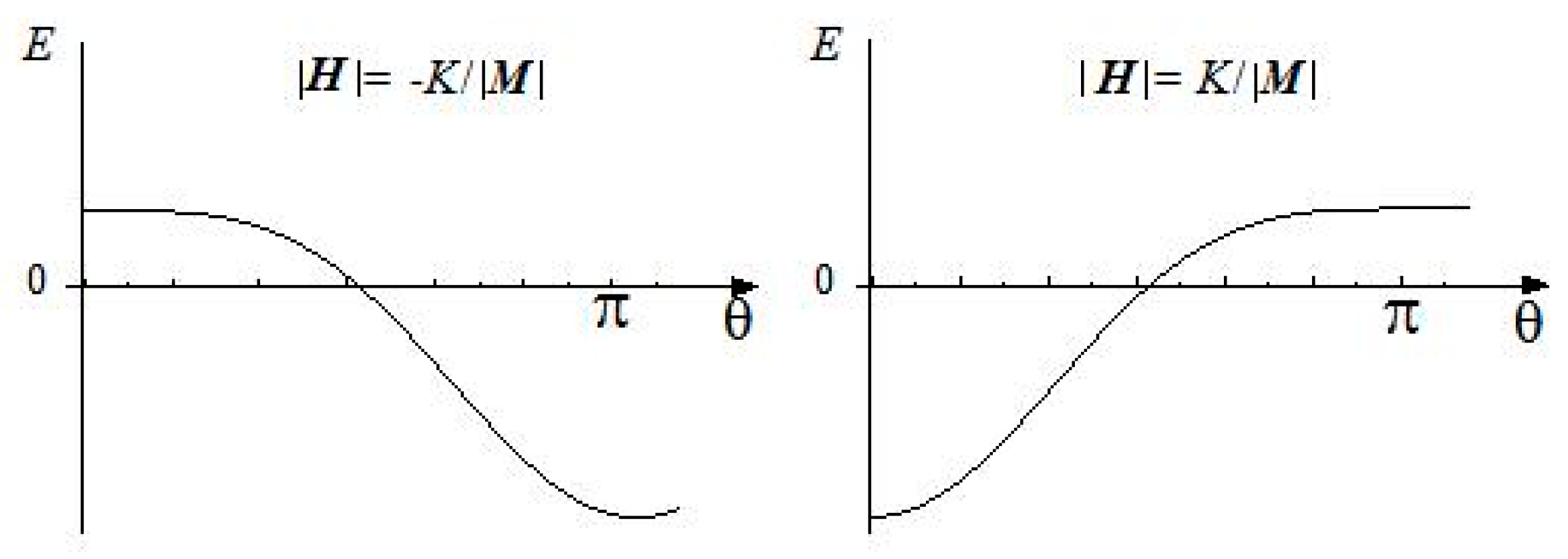
2.2. Stoner-Wohlfarth Model
3. Results and Discussion
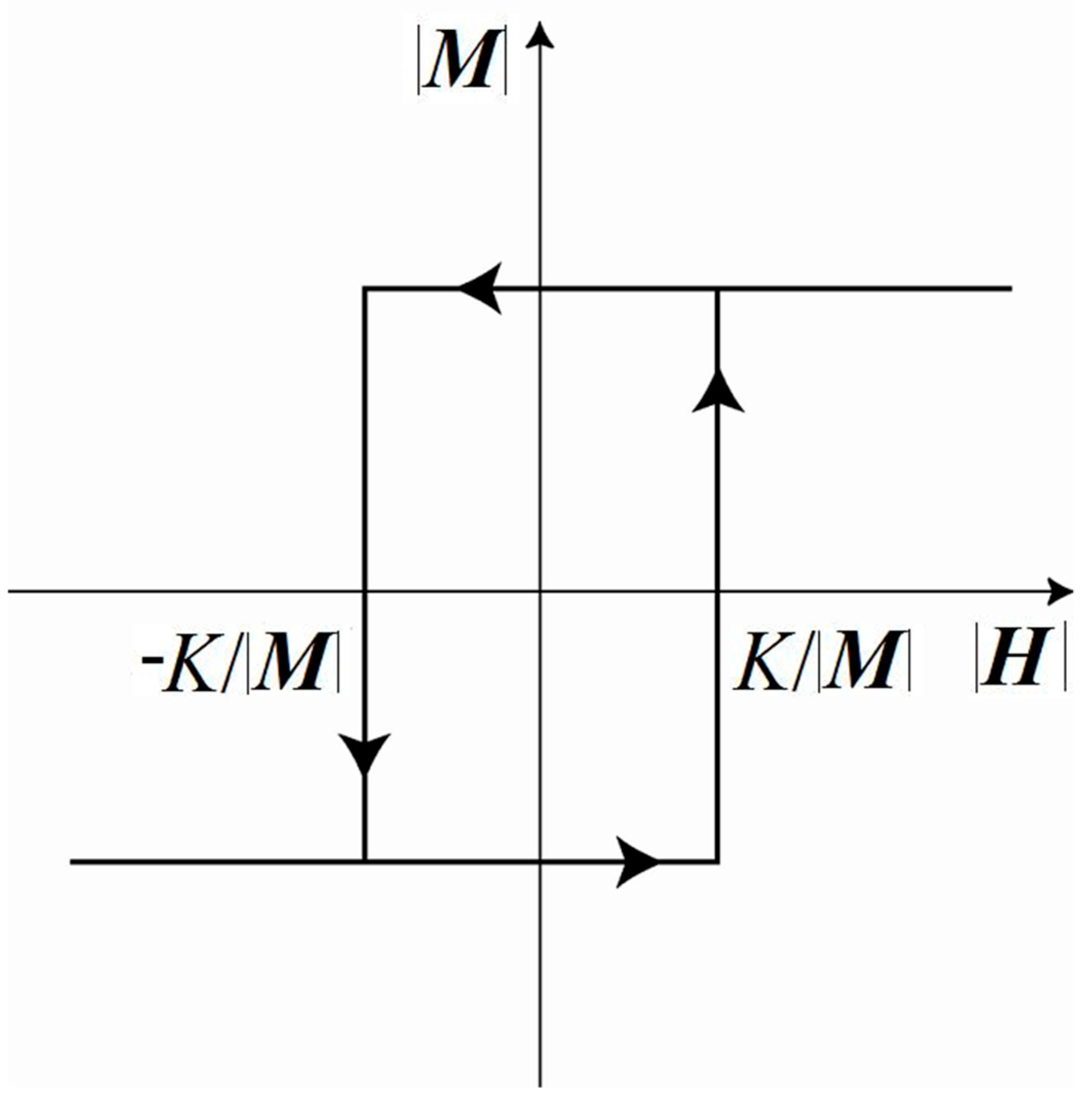
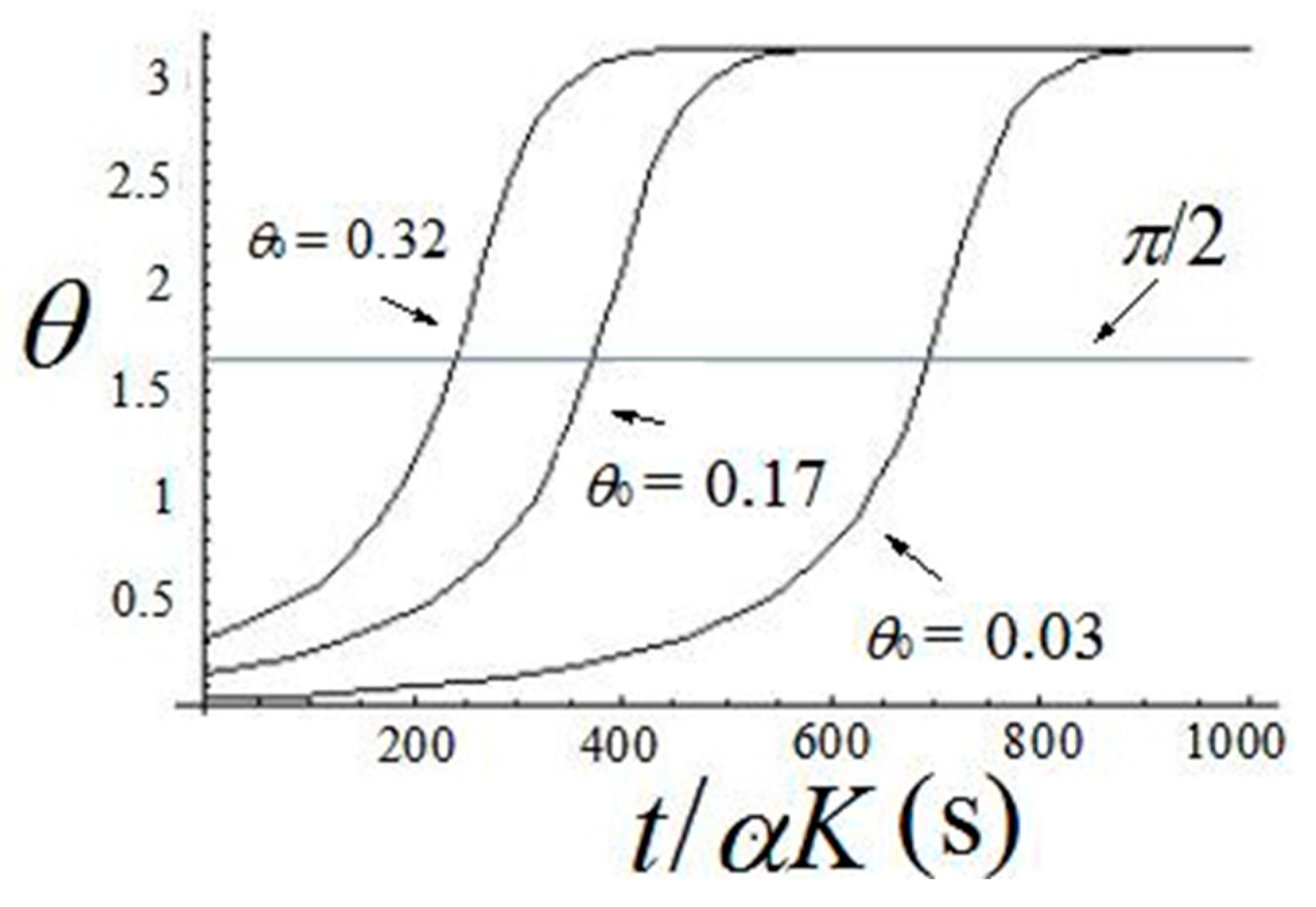
3.1. Switching Behavior under Axial Symmetry
α × ((dθ/dt) × eφ − (dφ/dt) × sinθeθ)
(K − hz)−1 × In(hz × (1 + cosθ0) × (K × cosθ0 + hz)−1))
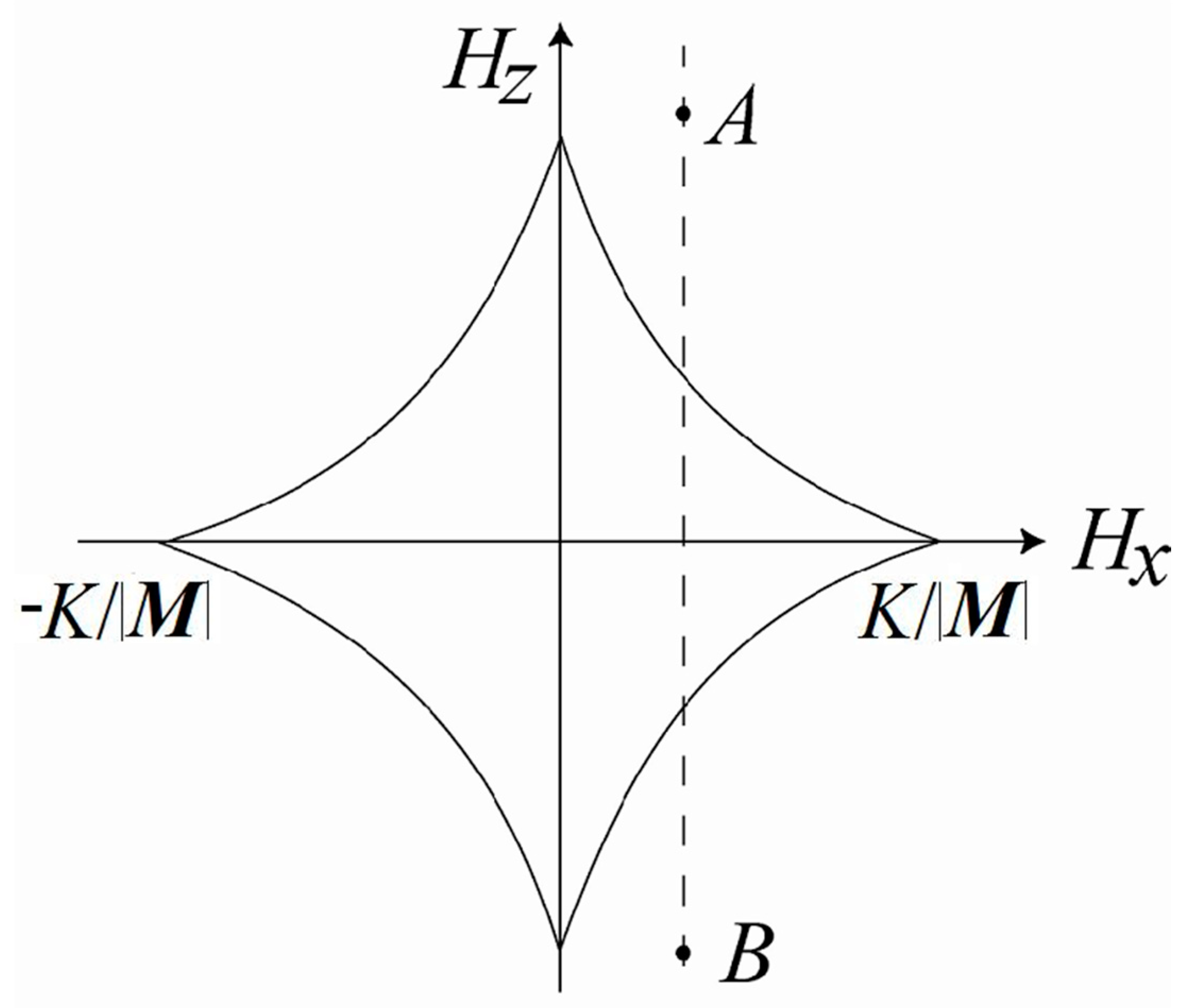
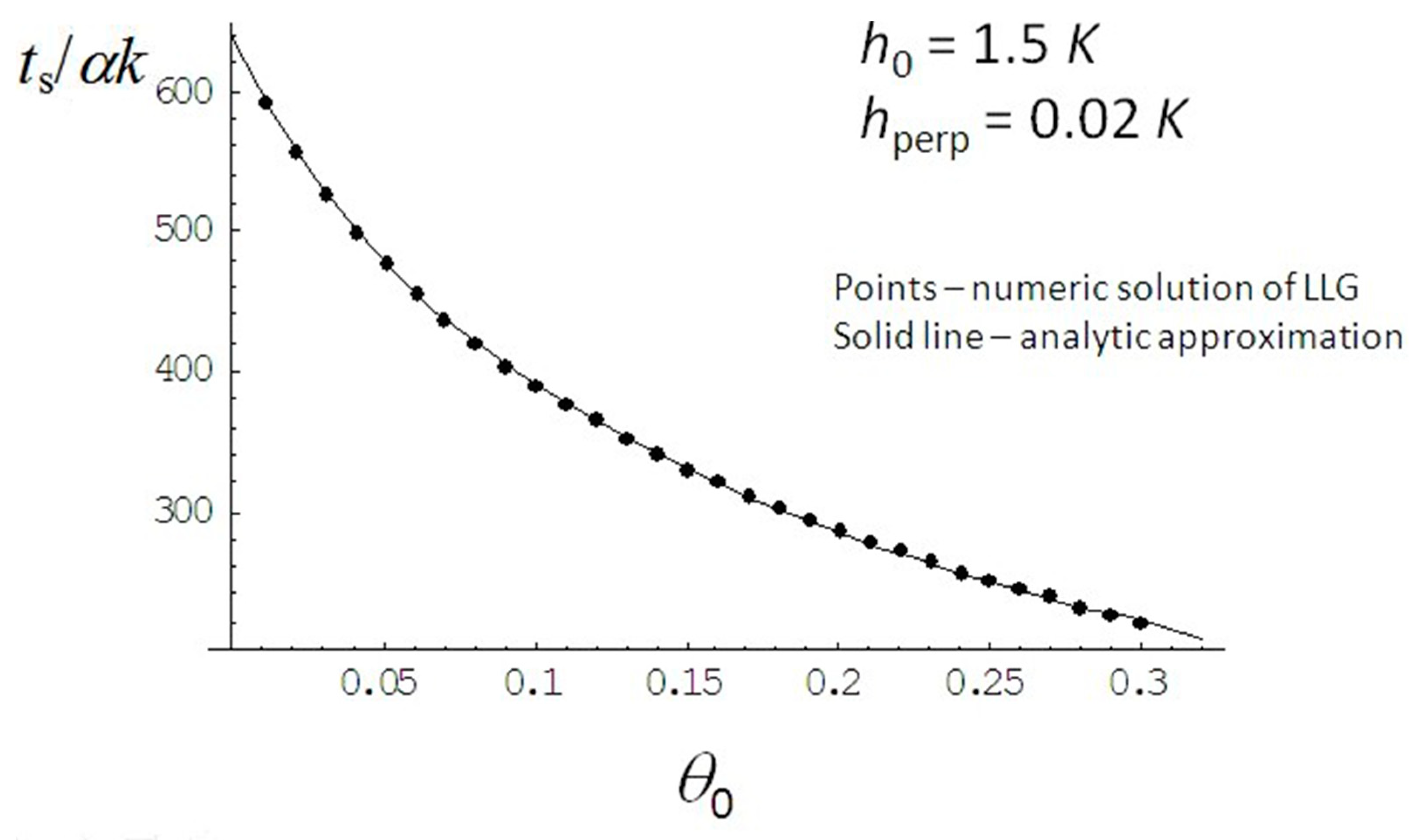
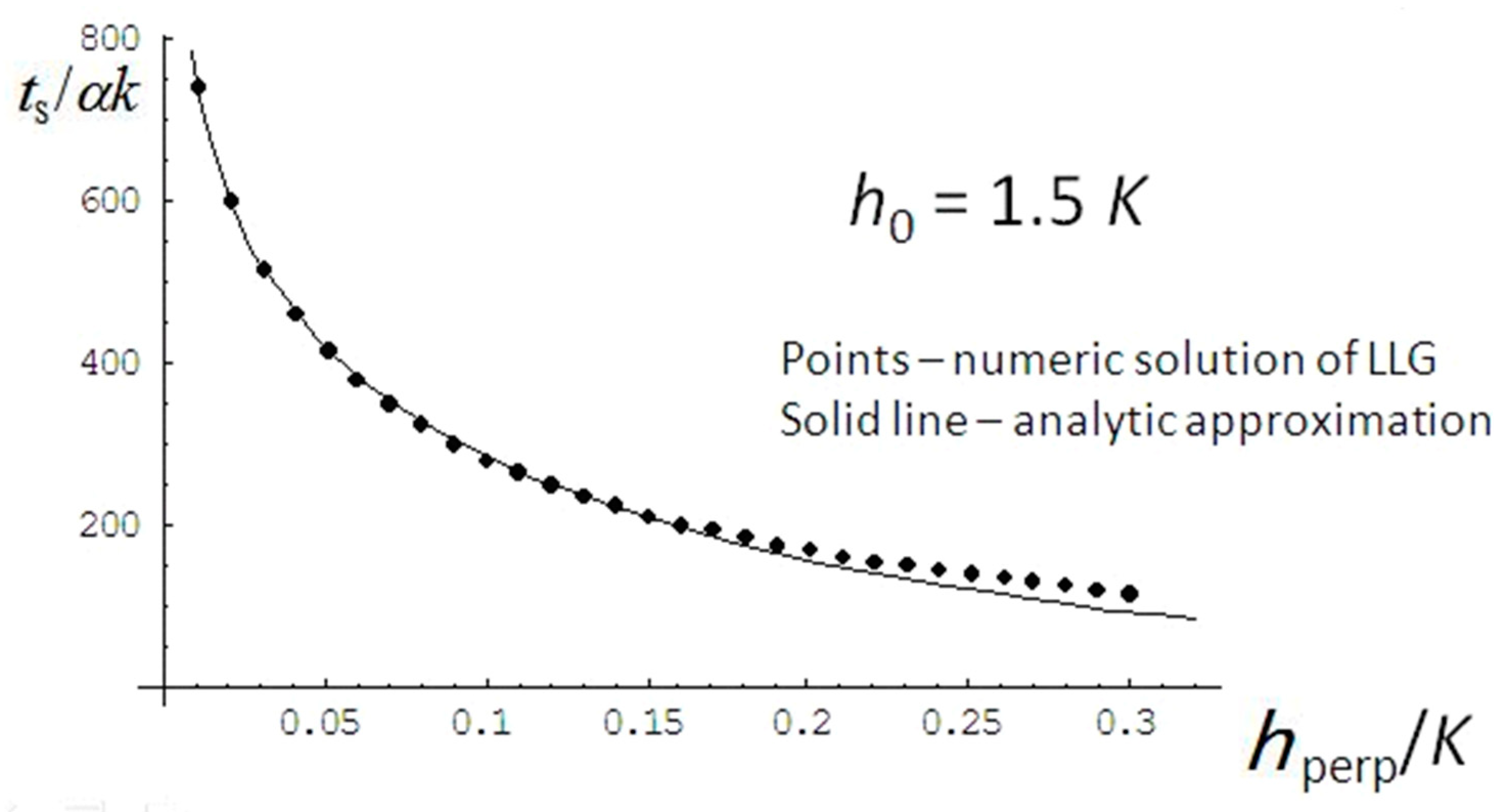
3.2. Switching Behavior of an SW particle in a Small Perpendicular Bias Field
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Xi, H.; White, R.M. Coupling between two ferromagnetic layers separated by an antiferromagnetic layer. Phys. Rev. B 2000, 62, 3933. [Google Scholar] [CrossRef]
- Lee, J.; Kim, S.; Jeong, J.; Kim, J.; Shin, S. In situ vectorial magnetization study of ultrathin magnetic films using a surface magneto-optical Kerr effect measurement system. IEEE Trans. Magn. 2001, 37, 2773–2775. [Google Scholar]
- Chen, Y.; Lin, Y.; Chen, D.; Yao, Y.; Lee, S.; Liou, Y. Current-assisted magnetization switching in submicron permalloy S-shape wires with narrow junctions. J. Appl. Phys. 2005, 97, 10J703. [Google Scholar] [CrossRef]
- Wegrowe, J.E.; Drouhin, H.J. From spin diffusion to magnetization reversal: The four-channel approach. Proceeding of the Quantum Sensing and Nanophotonic Devices II, San Jose, CA, USA, 22–27 January 2005. [Google Scholar]
- Hellwig, O.; Berger, A.; Kortright, J.B.; Fullerton, E.E. Domain structures and magnetization reversal of antiferromagnetically coupled perpendicular anisotropy films. J. Magn. Magn. Mater. 2007, 319, 13–55. [Google Scholar] [CrossRef]
- Steblii, M.E.; Ognev, A.V.; Ivanov, Y.P.; Pustovalov, E.V.; Plotnikov, V.S.; Chebotkevich, L.A. Features of the magnetic properties of Pd/Fe/Pd films and nanodisks. Bull. Russ. Acad. Sci. Phys. 2010, 74, 1407–1409. [Google Scholar] [CrossRef]
- Newell, A.J. A high-precision model of first-order reversal curve (FORC) functions for single-domain ferromagnets with uniaxial anisotropy. Geochem. Geophys. Geosyst. 2005, 6. [Google Scholar] [CrossRef] [Green Version]
- Stoner, E.C.; Wohlfarth, E.P. A mechanism of magnetic hysteresis in heterogeneous alloys. Philos. Trans. R. Soc. A 1948, 240, 599–642. [Google Scholar] [CrossRef]
- Liu, L.; Lee, O.J.; Gudmundsen, T.J.; Ralph, D.C.; Buhrman, R.A. Current-induced switching of perpendicularly magnetized magnetic layers using spin torque from the spin Hall effect. Phys. Rev. Lett. 2012, 109, 096602. [Google Scholar] [CrossRef] [PubMed]
- Lu, J.; Huang, H.; Klik, I. Field orientations and sweep rate effects on magnetic switching of Stoner-Wohlfarth particles. J. Appl. Phys. 1994, 76, 1726–1732. [Google Scholar] [CrossRef]
- Tannous, C.; Gieraltowski, J. The Stoner-Wohlfarth model of ferromagnetism. Eur. J. Phys. 2008, 29, 475. [Google Scholar] [CrossRef]
- Hutchby, J.A.; Cavin, R.; Zhirnov, V.; Brewer, J.E.; Bourianoff, G. Emerging nanoscale memory and logic devices: A critical assessment. Computer 2008, 41, 28–32. [Google Scholar] [CrossRef]
- Han, X.; Wen, Z.; Wei, H. Nanoring magnetic tunnel junction and its application in magnetic random access memory demo devices with spin-polarized current switching. J. Appl. Phys. 2008, 103, 07E933. [Google Scholar] [CrossRef]
- Lee, I.; Obukhov, Y.; Xiang, G.; Hauser, A.; Yang, F.; Banerjee, P.; Pelekhov, D.V.; Hammel, P.C. Nanoscale scanning probe ferromagnetic resonance imaging using localized modes. Nature 2010, 466, 845. [Google Scholar] [CrossRef]
- Lakshmanan, M.; Nakamura, K. Landau-Lifshitz equation of ferromagnetism: Exact treatment of the Gilbert damping. Phys. Rev. Lett. 1984, 53, 2497. [Google Scholar] [CrossRef]
- Gilbert, T.L. A Lagrangian formulation of the gyromagnetic equation of the magnetic field. Phys. Rev. 1955, 100, 1243. [Google Scholar]
- Landau, L.D.; Lifshitz, E.M. Theory of the dispersion of magnetic permeability in ferromagnetic bodies. Phys. Z. Sowjetunion 1935, 8, 153. [Google Scholar]
- Hinzke, D.; Nowak, U. Magnetization Switching in Nanowires: Monte Carlo Study with Fast Fourier Transformation for Dipolar Fields. J. Magn. Magn. Mater. 2000, 221, 365–372. [Google Scholar] [CrossRef]
- Sutcliffe, P. Vortex rings in ferromagnets: Numerical simulations of the time-dependent three-dimensional Landau-Lifshitz equation. Phys. Rev. B 2007, 76, 184439. [Google Scholar] [CrossRef]
- Andersson, J.O.; Djurberg, C.; Jonsson, T.; Svedlindh, P.; Nordblad, P. Monte Carlo studies of the dynamics of an interacting monodispersive magnetic-particle system. Phys. Rev. B 1997, 56, 13983. [Google Scholar] [CrossRef]
- Serpico, C.; d’Aquino, M.; Bertotti, G.; Mayergoyz, I.D. Analytical approach to current-driven self-oscillations in Landau-Lifshitz-Gilbert dynamics. J. Magn. Magn. Mater. 2005, 290, 502–505. [Google Scholar] [CrossRef]
- Olive, E.; Lansac, Y.; Meyer, M.; Hayoun, M.; Wegrowe, J.E. Deviation from the Landau-Lifshitz-Gilbert equation in the inertial regime of the magnetization. J. Appl. Phys. 2015, 117, 213904. [Google Scholar] [CrossRef] [Green Version]
- Bertotti, G.; Mayergoyz, I.; Serpico, C.; Dimian, M. Comparison of analytical solutions of Landau-Lifshitz equation for “damping” and “precessional” switchings. J. Appl. Phys. 2003, 93, 6811–6813. [Google Scholar] [CrossRef]
- Bloch, F. Nuclear Induction. Phys. Rev. 1946, 70, 460. [Google Scholar] [CrossRef]
- Moriya, T. Anisotropic superexchange interaction and weak ferromagnetism. Phys. Rev. 1960, 120, 91. [Google Scholar] [CrossRef]
- Lu, Y.; Altman, R.A.; Rishton, S.A.; Trouilloud, P.L.; Xiao, G.; Gallagher, W.J.; Parkin, S.S.P. Shape-anisotropy-controlled magnetoresistive response in magnetic tunnel junctions. Appl. Phys. Lett. 1997, 70, 2610–2612. [Google Scholar] [CrossRef]
- Fan, X.; Xue, D.; Jiang, C.; Gong, Y.; Li, J. An approach for researching uniaxial anisotropy magnet: Rotational magnetization. J. Appl. Phys. 2007, 102, 123901. [Google Scholar] [CrossRef]
- Schmalhorst, J.; Bruckl, H.; Reiss, G.; Kinder, R.; Gieres, G.; Wecker, J. Switching stability of magnetic tunnel junctions with an artificial antiferromagnet. Appl. Phys. Lett. 2000, 77, 3456–3458. [Google Scholar] [CrossRef]
- De Campos, M.F.; da Silva, F.A.S.; Perigo, E.A.; de Castro, J.A. Stoner-Wohlfarth model for the anisotropic case. J. Magn. Magn. Mater. 2013, 345, 147–152. [Google Scholar] [CrossRef]
- Atherton, D.L.; Beattie, J.R. A mean field Stoner-Wohlfarth hysteresis model. IEEE Trans. Magn. 1990, 26, 3059–3063. [Google Scholar] [CrossRef]
- Thiaville, A. Coherent rotation of magnetization in three dimensions: A geometrical approach. Phys. Rev. B 2000, 61, 12221. [Google Scholar] [CrossRef]
- Chen, W.; Qian, L.; Xiao, G. Deterministic Current Induced Magnetic Switching Without External Field Using Giant Spin Hall Effect of β-W. Sci. Rep. 2018, 8. [Google Scholar] [CrossRef] [PubMed]
- Stupakiewicz, A.; Szerenos, K.; Afanasiev, D.; Kirilyuk, A.; Kimel, A.V. Ultrafast photo-magnetic recording in transparent medium. Nature 2016, 542, 71–74. [Google Scholar] [CrossRef] [PubMed]
- Uesaka, Y.; Endo, H.; Takahashi, T.; Nakatani, Y.; Hayashi, N.; Fukushima, H. Numerical simulation of switching time of magnetic particle. Phys. Status Solidi A 2002, 189, 1023–1027. [Google Scholar] [CrossRef]
- Belmeguenai, M.; Devolder, T.; Chappert, C. Analytical solution for precessional magnetization switching in exchange biased high perpendicular anisotropy nanostructures. J. Phys. D Appl. Phys. 2005, 39, 1. [Google Scholar] [CrossRef]
- Poperechny, I.S.; Raikher, Y.L.; Stepanov, V.I. Dynamic magnetic hysteresis in single-domain particles with uniaxial anistropy. Phys. Rev. B 2010, 82, 174423. [Google Scholar] [CrossRef]
- Mathematica, version 7; Wolfram Research: Champaign, IL, USA, 2008.









© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xue, D.; Ma, W. Magnetic Switching of a Stoner-Wohlfarth Particle Subjected to a Perpendicular Bias Field. Electronics 2019, 8, 366. https://doi.org/10.3390/electronics8030366
Xue D, Ma W. Magnetic Switching of a Stoner-Wohlfarth Particle Subjected to a Perpendicular Bias Field. Electronics. 2019; 8(3):366. https://doi.org/10.3390/electronics8030366
Chicago/Turabian StyleXue, Dong, and Weiguang Ma. 2019. "Magnetic Switching of a Stoner-Wohlfarth Particle Subjected to a Perpendicular Bias Field" Electronics 8, no. 3: 366. https://doi.org/10.3390/electronics8030366