Semiactive Hybrid Energy Management System: A Solution for Electric Wheelchairs

 ,
,  ,
,  ,
,  and
and
Abstract
:1. Introduction
2. Methodology
2.1. Overview of the Proposed Methodology
2.2. Fast-Charging System for EW
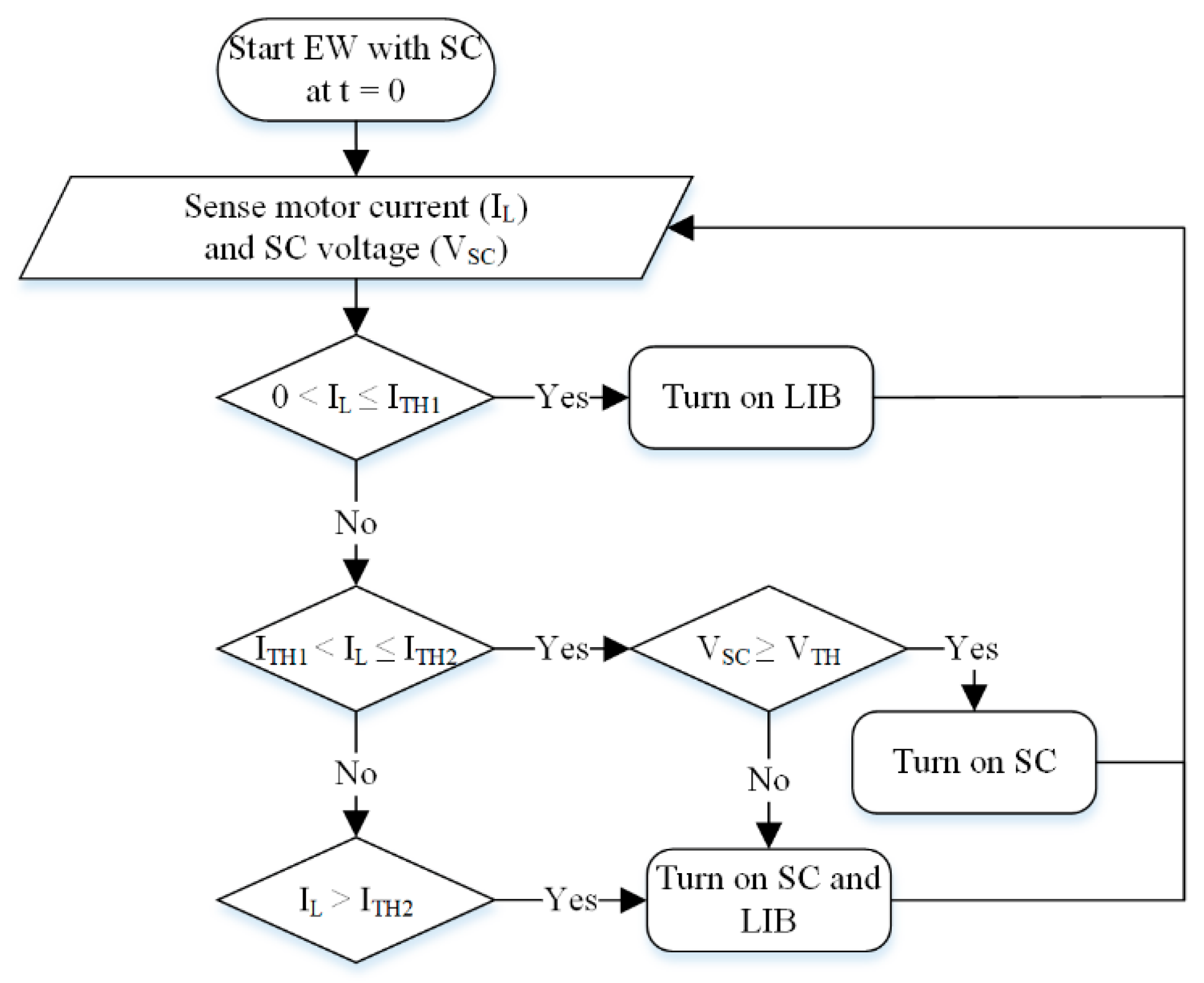
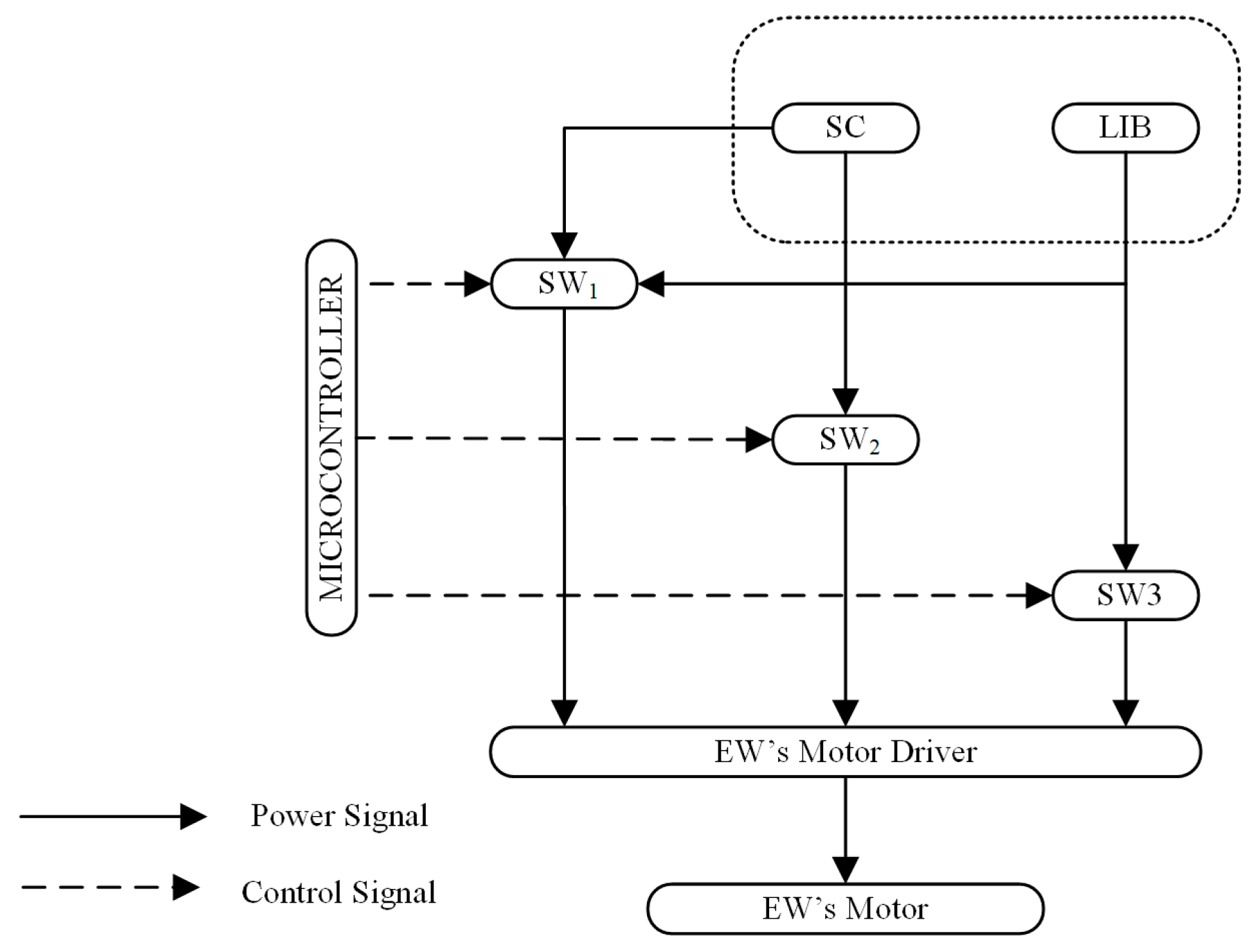
2.3. Smart Energy Management System for the SA-HESS
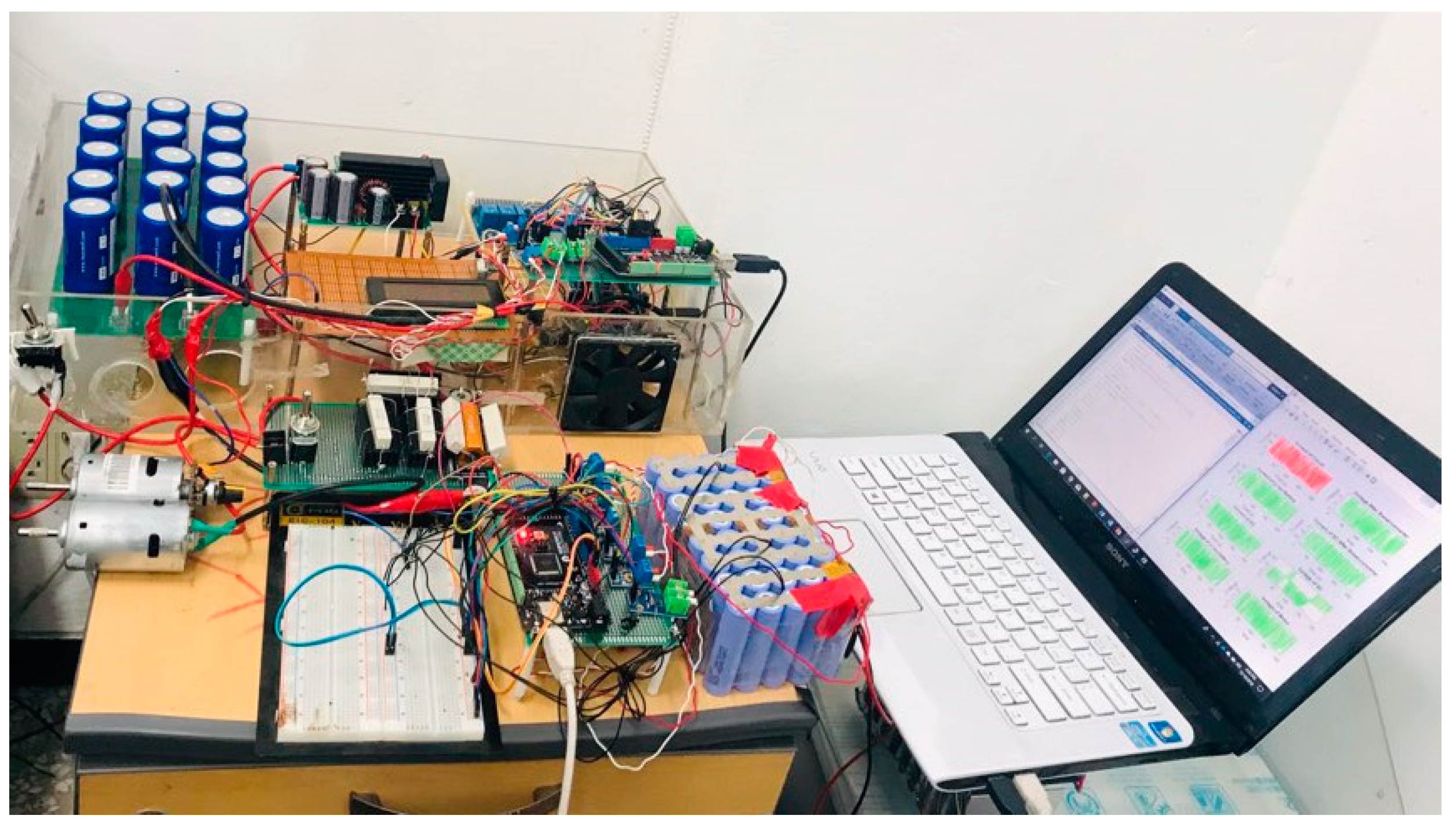
3. Experimental Setup
4. Results
4.1. Performance Evaluation of Smart Energy Management System
4.1.1. Charging System Using SEMS
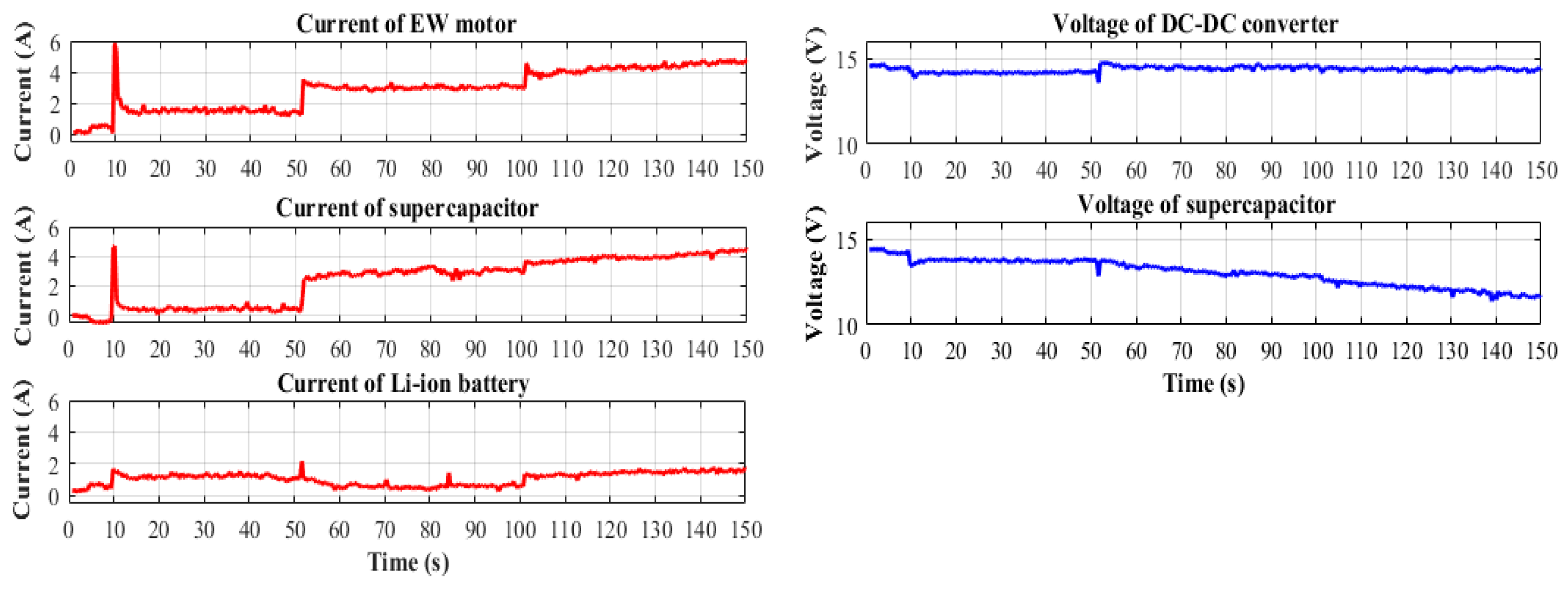
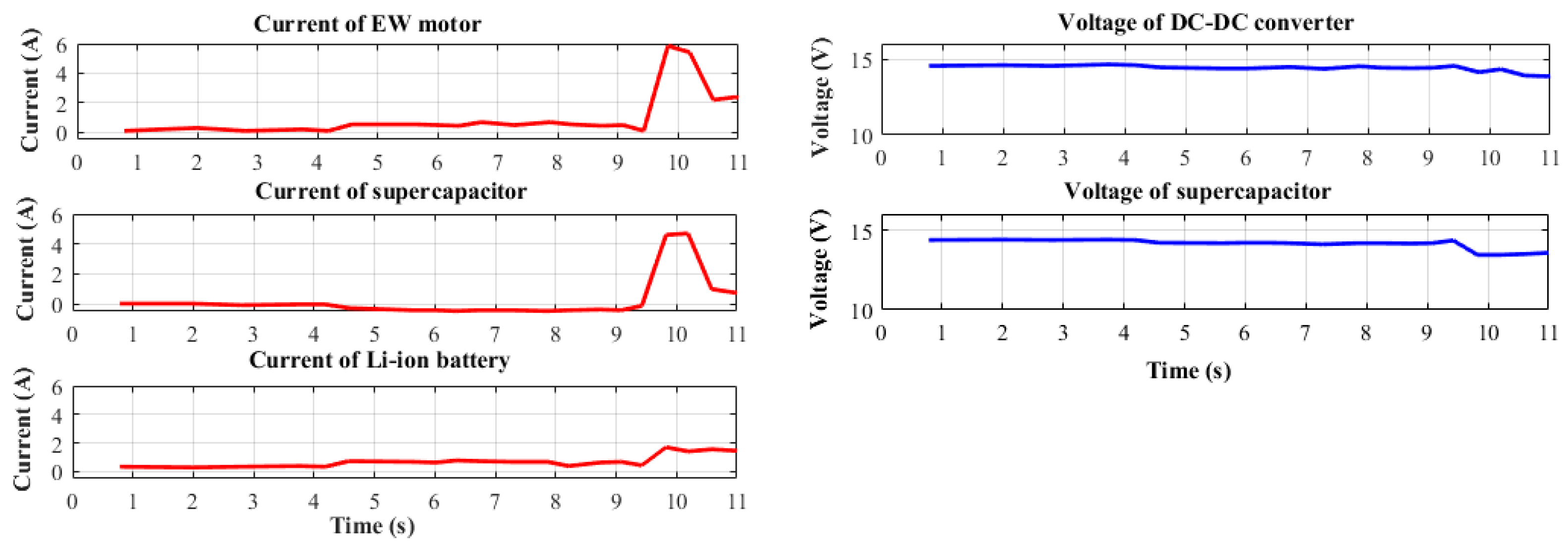
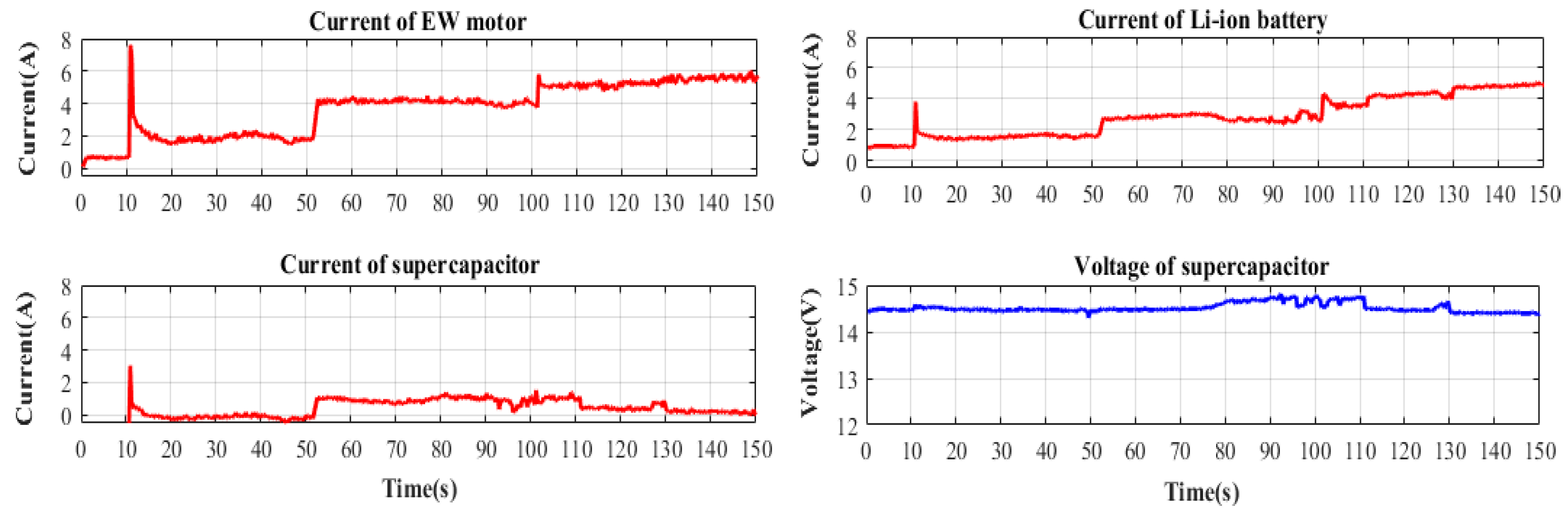
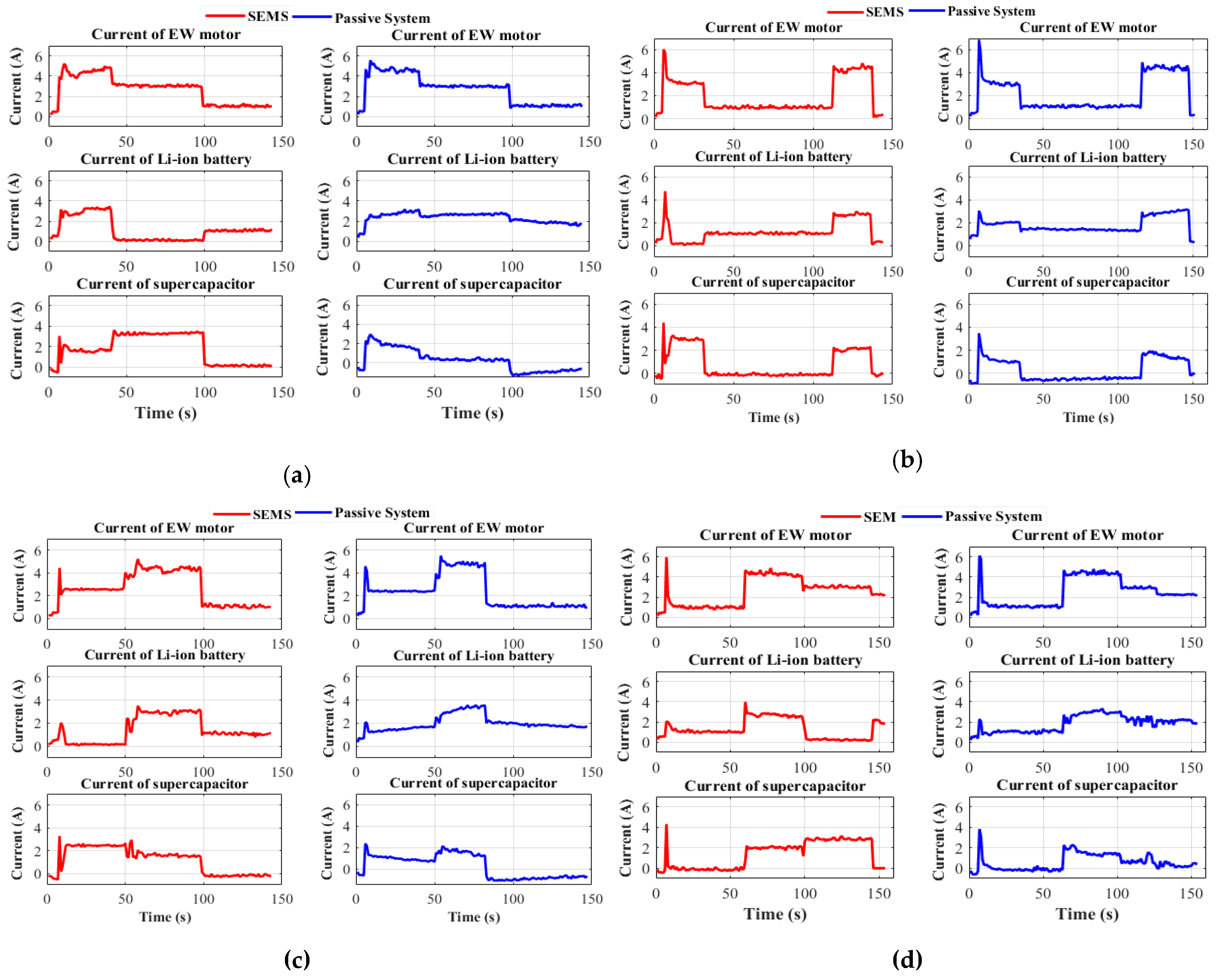
4.1.2. Discharging System Using SEMS
Case—EW Start (t = 0–11 s)
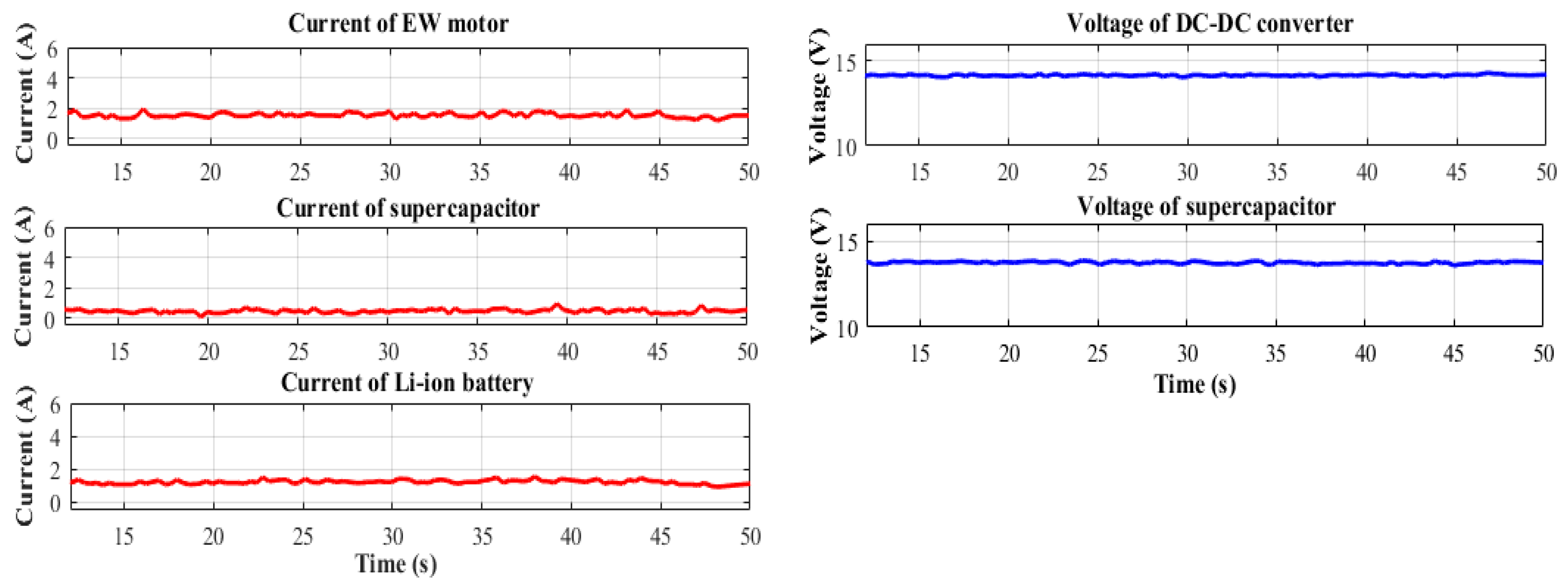
Case—Plain Track (t = 11–50 s)
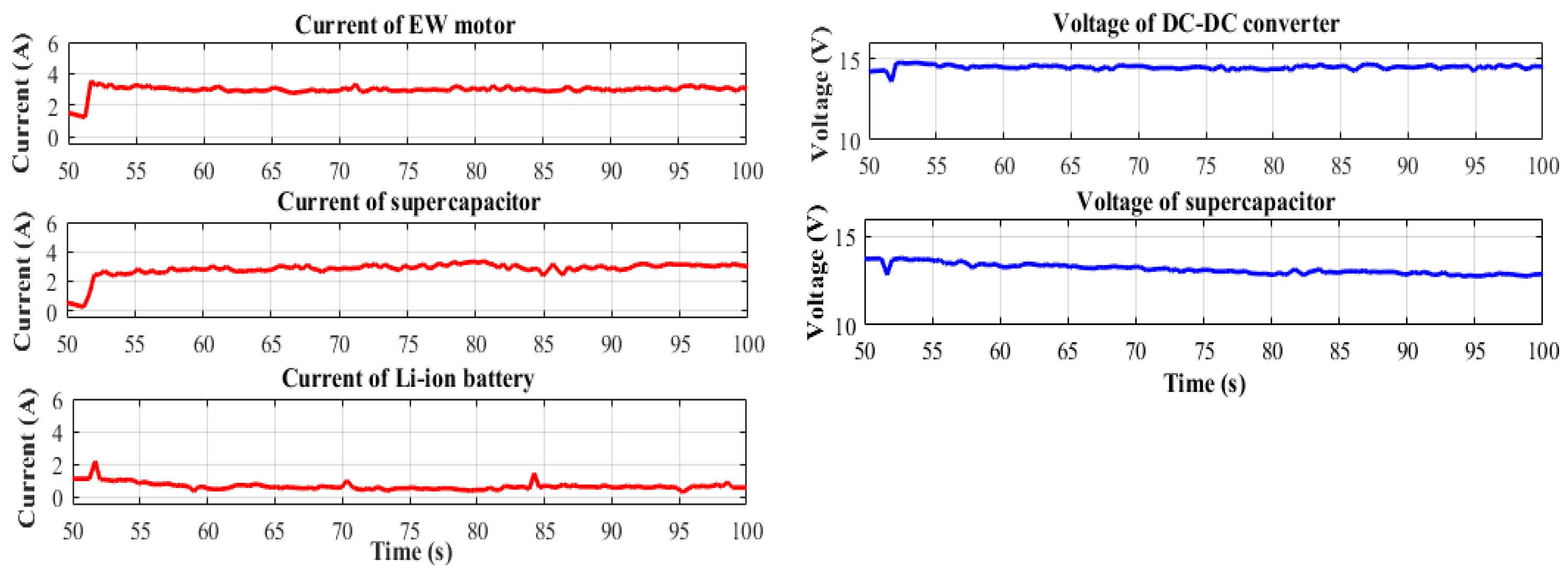
Case—Climbing Uphill (t = 51–150 s)
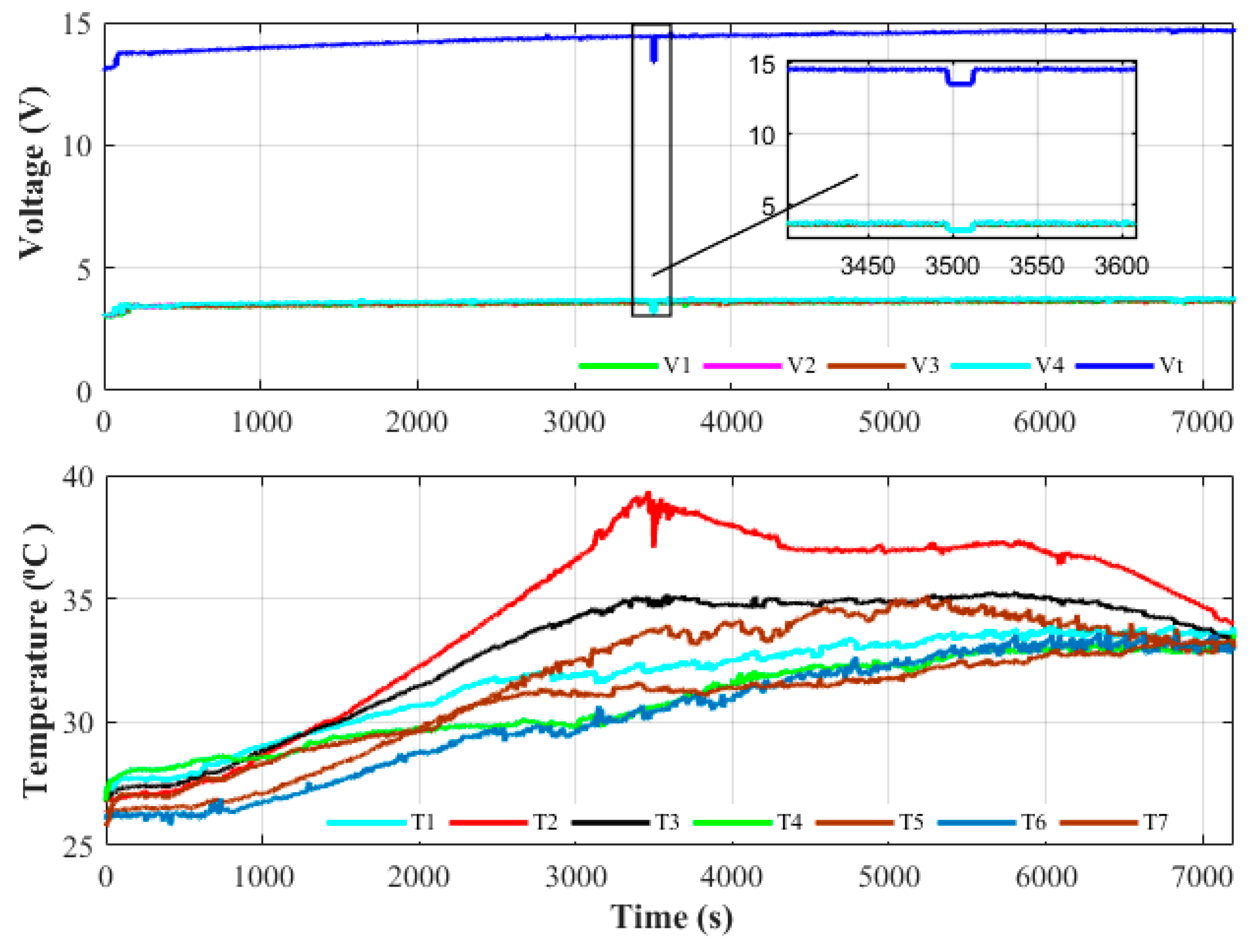
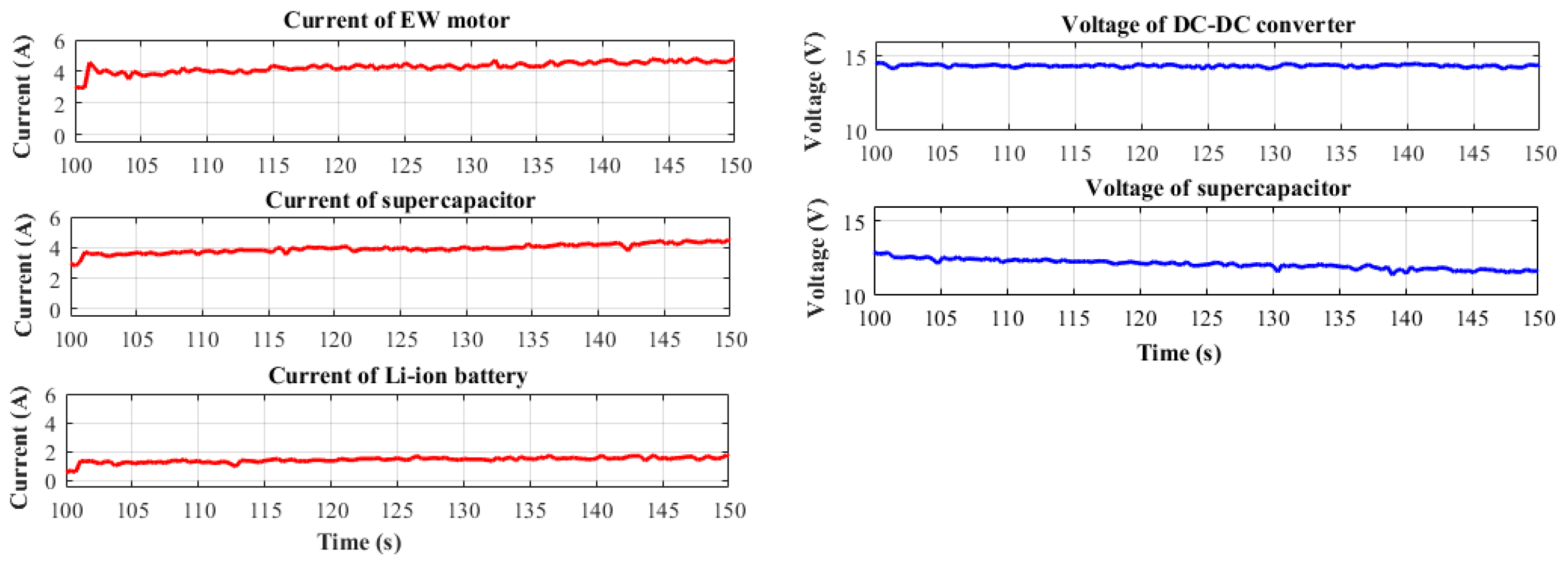
4.2. Performance Evaluation of P-HESS
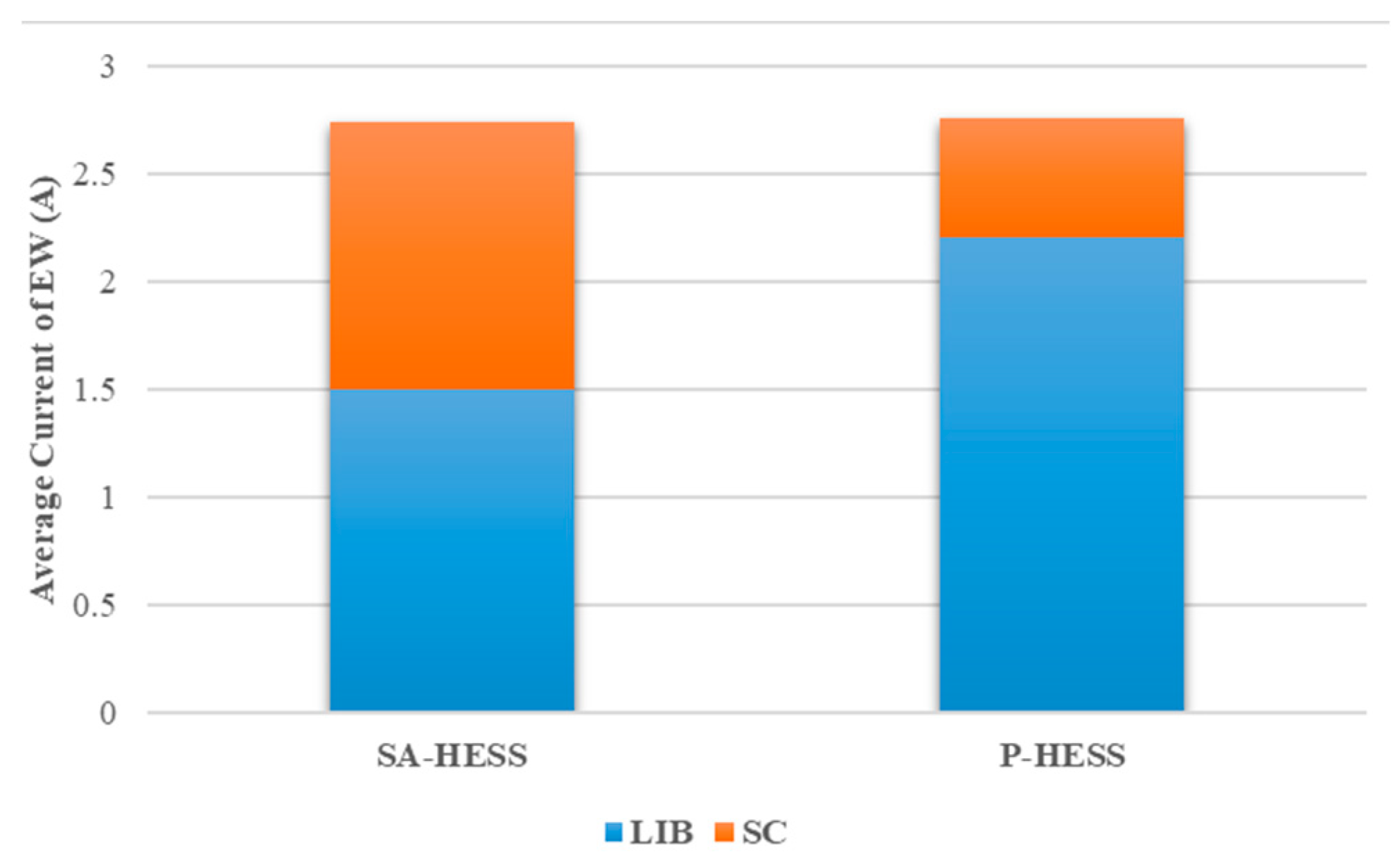
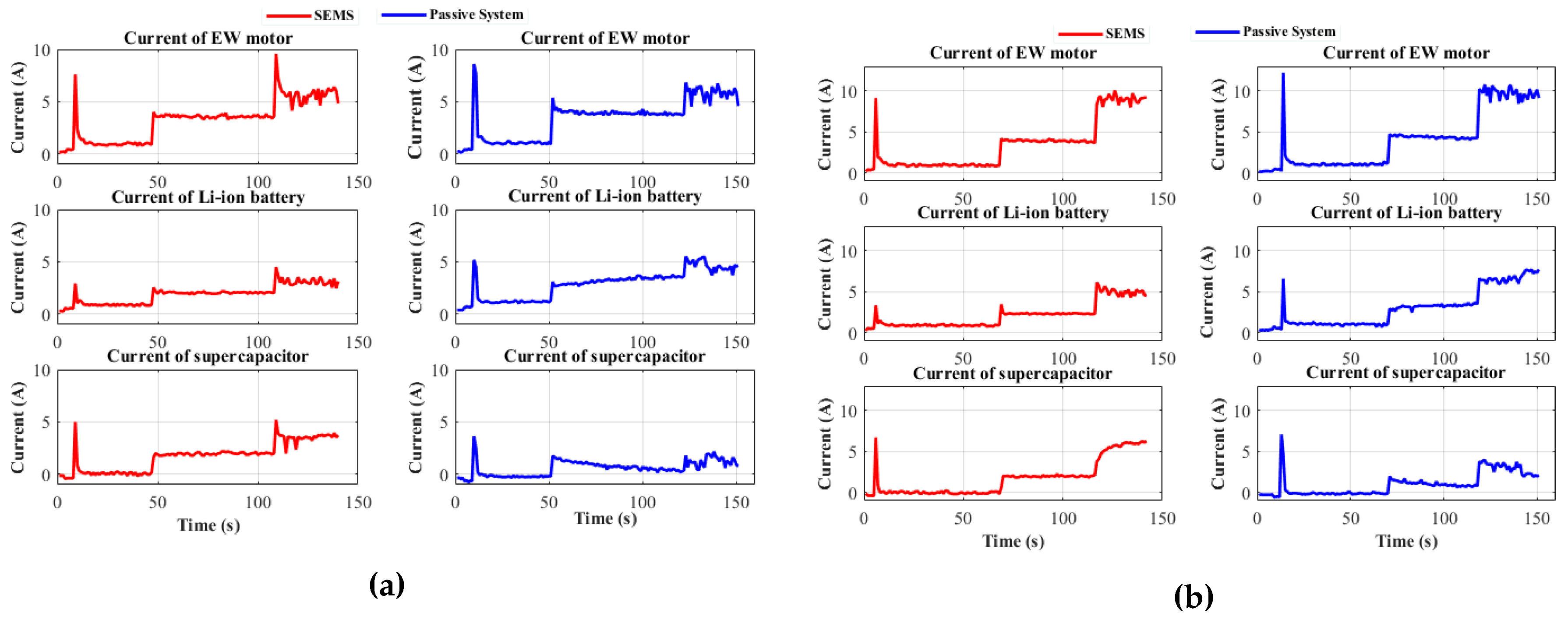
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

References
- Tian, Z.; Xu, W. Electric wheelchair controller based on parameter self-adjusting fuzzy PID. In Proceedings of the International Conference on Computational Intelligence and Natural Computing, CINC’09, Wuhan, China, 6–7 June 2009; pp. 358–361. [Google Scholar]
- Yang, Y.-P.; Guan, R.-M.; Huang, Y.-M. Hybrid fuel cell powertrain for a powered wheelchair driven by rim motors. J. Power Sources 2012, 212, 192–204. [Google Scholar] [CrossRef]
- Khan, M.A.; Zeb, K.; Sathishkumar, P.; Ali, M.U.; Uddin, W.; Hussain, S.; Ishfaq, M.; Khan, I.; Cho, H.-G.; Kim, H.-J. A Novel Supercapacitor/Lithium-Ion Hybrid Energy System with a Fuzzy Logic-Controlled Fast Charging and Intelligent Energy Management System. Electronics 2018, 7, 63. [Google Scholar] [CrossRef]
- Cooper, R.A.; Cooper, R.; Boninger, M.L. Trends and issues in wheelchair technologies. Assist. Technol. 2008, 20, 61–72. [Google Scholar] [CrossRef] [PubMed]
- Cortés, U.; Annicchiarico, R.; Vázquez-Salceda, J.; Urdiales, C.; Cañamero, L.; López, M.; Sànchez-Marrè, M.; Caltagirone, C. Assistive technologies for the disabled and for the new generation of senior citizens: The e-Tools architecture. AI Commun. 2003, 16, 193–207. [Google Scholar]
- Cano, Z.P.; Banham, D.; Ye, S.; Hintennach, A.; Lu, J.; Fowler, M.; Chen, Z. Batteries and fuel cells for emerging electric vehicle markets. Nat. Energy 2018, 3, 279. [Google Scholar] [CrossRef]
- Ding, D.; Cooper, R.A. Electric powered wheelchairs. IEEE Control Syst. Mag. 2005, 25, 22–34. [Google Scholar]
- Ding, Y.; Cano, Z.P.; Yu, A.; Lu, J.; Chen, Z. Automotive Li-Ion Batteries: Current Status and Future Perspectives. Electrochem. Energy Rev. 2019, 2, 1–28. [Google Scholar] [CrossRef]
- Kim, T.; Song, W.; Son, D.-Y.; Ono, L.K.; Qi, Y. Lithium-ion batteries: Outlook on present, future, and hybridized technologies. J. Mater. Chem. A 2019, 7, 2942–2964. [Google Scholar] [CrossRef]
- Hussain Nengroo, S.; Ali, M.U.; Zafar, A.; Hussain, S.; Murtaza, T.; Junaid Alvi, M.; Raghavendra, K.V.G.; Jee Kim, H. An Optimized Methodology for a Hybrid Photo-Voltaic and Energy Storage System Connected to a Low-Voltage Grid. Electronics 2019, 8, 176. [Google Scholar] [CrossRef]
- Ren, G.; Ma, G.; Cong, N. Review of electrical energy storage system for vehicular applications. Renew. Sustain. Energy Rev. 2015, 41, 225–236. [Google Scholar] [CrossRef]
- Hussain Nengroo, S.; Kamran, M.; Ali, M.U.; Kim, D.-H.; Kim, M.-S.; Hussain, A.; Kim, H. Dual battery storage system: An optimized strategy for the utilization of renewable photovoltaic energy in the United Kingdom. Electronics 2018, 7, 177. [Google Scholar] [CrossRef]
- Masih-Tehrani, M.; Ha’iri-Yazdi, M.-R.; Esfahanian, V.; Safaei, A. Optimum sizing and optimum energy management of a hybrid energy storage system for lithium battery life improvement. J. Power Sources 2013, 244, 2–10. [Google Scholar] [CrossRef]
- Ralon, P.; Taylor, M.; Ilas, A.; Diaz-Bone, H.; Kairies, K. Electricity Storage and Renewables: Costs and Markets to 2030; International Renewable Energy Agency: Abu Dhabi, UAE, 2017. [Google Scholar]
- Ali, M.U.; Zafar, A.; Hussain Nengroo, S.; Hussain, S.; Alvi, M.J.; Kim, H.-J. Towards a Smarter Battery Management System for Electric Vehicle Applications: A Critical Review of Lithium-Ion Battery State of Charge Estimation. Energies 2019, 12, 446. [Google Scholar] [CrossRef]
- Gao, L.; Dougal, R.A.; Liu, S. Power enhancement of an actively controlled battery/ultracapacitor hybrid. Ieee Trans. Power Electron. 2005, 20, 236–243. [Google Scholar] [CrossRef]
- Di Napoli, A.; Ndokaj, A. Auxiliary power buffer based on ultracapacitors. In Proceedings of the 2012 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Sorrento, Italy, 20–22 June 2012; pp. 759–763. [Google Scholar]
- Yin, H.; Zhao, C.; Li, M.; Ma, C. Utility function-based real-time control of a battery ultracapacitor hybrid energy system. IEEE Trans. Ind. Inform. 2015, 11, 220–231. [Google Scholar] [CrossRef]
- Hochgraf, C.G.; Basco, J.K.; Bohn, T.P.; Bloom, I. Effect of ultracapacitor-modified PHEV protocol on performance degradation in lithium-ion cells. J. Power Sources 2014, 246, 965–969. [Google Scholar] [CrossRef]
- Zimmermann, T.; Keil, P.; Hofmann, M.; Horsche, M.F.; Pichlmaier, S.; Jossen, A. Review of system topologies for hybrid electrical energy storage systems. J. Energy Storage 2016, 8, 78–90. [Google Scholar] [CrossRef]
- Miller, J.M. Energy storage technology markets and application’s: Ultracapacitors in combination with lithium-ion. In Proceedings of the 7th Internatonal Conference on Power Electronics, ICPE’07, Daegu, Korea, 22–26 October 2007; pp. 16–22. [Google Scholar]
- Erdinc, O.; Vural, B.; Uzunoglu, M. A wavelet-fuzzy logic based energy management strategy for a fuel cell/battery/ultra-capacitor hybrid vehicular power system. J. Power Sources 2009, 194, 369–380. [Google Scholar] [CrossRef]
- Zhang, Q.; Deng, W. An Adaptive Energy Management System for Electric Vehicles Based on Driving Cycle Identification and Wavelet Transform. Energies 2016, 9, 341. [Google Scholar] [CrossRef]
- Xiong, R.; Chen, H.; Wang, C.; Sun, F. Towards a smarter hybrid energy storage system based on battery and ultracapacitor-A critical review on topology and energy management. J. Clean. Prod. 2018, 202, 1228–1240. [Google Scholar] [CrossRef]
- Kuperman, A.; Aharon, I. Battery–ultracapacitor hybrids for pulsed current loads: A review. Renew. Sustain. Energy Rev. 2011, 15, 981–992. [Google Scholar] [CrossRef]
- Dougal, R.A.; Liu, S.; White, R.E. Power and life extension of battery-ultracapacitor hybrids. IEEE Trans. Compon. Packag. Technol. 2002, 25, 120–131. [Google Scholar] [CrossRef]
- Chen, Z. High pulse power system through engineering battery-capacitor combination. In Proceedings of the (IECEC) 35th Intersociety Energy Conversion Engineering Conference and Exhibit, Las Vegas, NV, USA, 24–28 July 2000; pp. 752–755. [Google Scholar]
- Miller, J. Battery-capacitor power source for digital communication applications: Simulations using advanced electrochemical capacitors. Electrochem. Soc. Proc. 1995, 29–95, 246–254. [Google Scholar]
- Tie, S.F.; Tan, C.W. A review of energy sources and energy management system in electric vehicles. Renew. Sustain. Energy Rev. 2013, 20, 82–102. [Google Scholar] [CrossRef]
- Ju, F.; Zhang, Q.; Deng, W.; Li, J. Review of structures and control of battery-supercapacitor hybrid energy storage system for electric vehicles. In Proceedings of the 2014 IEEE International Conference on Automation Science and Engineering (CASE), Taipei, Taiwan, 18–22 August 2014; pp. 143–148. [Google Scholar]
- Song, Z.; Hofmann, H.; Li, J.; Han, X.; Zhang, X.; Ouyang, M. A comparison study of different semi-active hybrid energy storage system topologies for electric vehicles. J. Power Sources 2015, 274, 400–411. [Google Scholar] [CrossRef]
- Cope, R.C.; Podrazhansky, Y. The art of battery charging. In Proceedings of the Fourteenth Annual Battery Conference on Applications and Advances, Long Beach, CA, USA, 12–15 January 1999; pp. 233–235. [Google Scholar]
- Ali, M.U.; Kamran, M.; Kumar, P.; Hussain Nengroo, S.; Khan, M.; Hussain, A.; Kim, H.-J. An Online Data-Driven Model Identification and Adaptive State of Charge Estimation Approach for Lithium-ion-Batteries Using the Lagrange Multiplier Method. Energies 2018, 11, 2940. [Google Scholar] [CrossRef]
- Hussein, A.A.-H.; Batarseh, I. A review of charging algorithms for nickel and lithium battery chargers. IEEE Trans. Veh. Technol. 2011, 60, 830–838. [Google Scholar] [CrossRef]
- Tsang, K.; Chan, W. Current sensorless quick charger for lithium-ion batteries. Energy Convers. Manag. 2011, 52, 1593–1595. [Google Scholar] [CrossRef]
- Wei, Z.; Meng, S.; Xiong, B.; Ji, D.; Tseng, K.J. Enhanced online model identification and state of charge estimation for lithium-ion battery with a FBCRLS based observer. Appl. Energy 2016, 181, 332–341. [Google Scholar] [CrossRef]
- Wei, Z.; Zou, C.; Leng, F.; Soong, B.H.; Tseng, K.-J. Online model identification and state-of-charge estimate for lithium-ion battery with a recursive total least squares-based observer. IEEE Trans. Ind. Electron. 2018, 65, 1336–1346. [Google Scholar] [CrossRef]
- Wei, Z.; Zhao, J.; Ji, D.; Tseng, K.J. A multi-timescale estimator for battery state of charge and capacity dual estimation based on an online identified model. Appl. Energy 2017, 204, 1264–1274. [Google Scholar] [CrossRef]
- Pay, S.; Baghzouz, Y. Effectiveness of battery-supercapacitor combination in electric vehicles. In Proceedings of the 2003 IEEE Bologna Power Tech Conference Proceedings, Bologna, Italy, 23–26 June 2003; Volume 3, p. 6. [Google Scholar]
- Rashid, M. Power Electronics Circuits, Devices, and Application; Ptrentice-Hall International Inc.: London, UK, 1993. [Google Scholar]
- Huang, J.-W.; Liu, Y.-H.; Wang, S.-C.; Yang, Z.-Z. Fuzzy-control-based five-step Li-ion battery charger. In Proceedings of the International Conference on Power Electronics and Drive Systems (PEDS 2009), Taipei, Taiwan, 3–6 November 2009; pp. 1547–1551. [Google Scholar]
- Wangsupphaphol, A.; Idris, N.; Jusoh, A.; Muhamad, N.; Yao, L.W. The energy management control strategy for electric vehicle applications. In Proceedings of the 2014 International Conference and Utility Exhibition on Green Energy for Sustainable Development (ICUE), Pattaya City, Thailand, 19–21 March 2014; pp. 1–5. [Google Scholar]
- Ortúzar, M.; Moreno, J.; Dixon, J. Ultracapacitor-based auxiliary energy system for an electric vehicle: Implementation and evaluation. IEEE Trans. Ind. Electron. 2007, 54, 2147–2156. [Google Scholar] [CrossRef]
- Cui, X.; Shen, W.; Zhang, Y.; Hu, C. A Fast Multi-Switched Inductor Balancing System Based on a Fuzzy Logic Controller for Lithium-Ion Battery Packs in Electric Vehicles. Energies 2017, 10, 1034. [Google Scholar] [CrossRef]
- Ali, M.U.; Hussain Nengroo, S.; Adil Khan, M.; Zeb, K.; Ahmad Kamran, M.; Kim, H.-J. A real-time simulink interfaced fast-charging methodology of lithium-ion batteries under temperature feedback with fuzzy logic control. Energies 2018, 11, 1122. [Google Scholar]
- Azizi, I.; Radjeai, H. A new strategy for battery and supercapacitor energy management for an urban electric vehicle. Electr. Eng. 2018, 100, 667–676. [Google Scholar] [CrossRef]
- Hybrid Wheelchair. Available online: https://mafiadoc.com/hybrid-wheelchair_59c3e8f11723dd285cbc616e.html (accessed on 9 January 2019).
- Tammineedi, C. Modeling Battery-Ultracapacitor Hybrid Systems for Solar and Wind Applications. Master’s Dessertation, The Pennsylvania State University Graduate School, State College, PA, USA, 2011. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hussain, S.; Ali, M.U.; Nengroo, S.H.; Khan, I.; Ishfaq, M.; Kim, H.-J. Semiactive Hybrid Energy Management System: A Solution for Electric Wheelchairs. Electronics 2019, 8, 345. https://doi.org/10.3390/electronics8030345
Hussain S, Ali MU, Nengroo SH, Khan I, Ishfaq M, Kim H-J. Semiactive Hybrid Energy Management System: A Solution for Electric Wheelchairs. Electronics. 2019; 8(3):345. https://doi.org/10.3390/electronics8030345
Chicago/Turabian StyleHussain, Sadam, Muhammad Umair Ali, Sarvar Hussain Nengroo, Imran Khan, Muhammad Ishfaq, and Hee-Je Kim. 2019. "Semiactive Hybrid Energy Management System: A Solution for Electric Wheelchairs" Electronics 8, no. 3: 345. https://doi.org/10.3390/electronics8030345