An Intersection Signal Control Mechanism Assisted by Vehicular Ad Hoc Networks


Abstract
:1. Introduction
2. Information Collection for Far Vehicles
3. Intersection Signal Control Mechanism
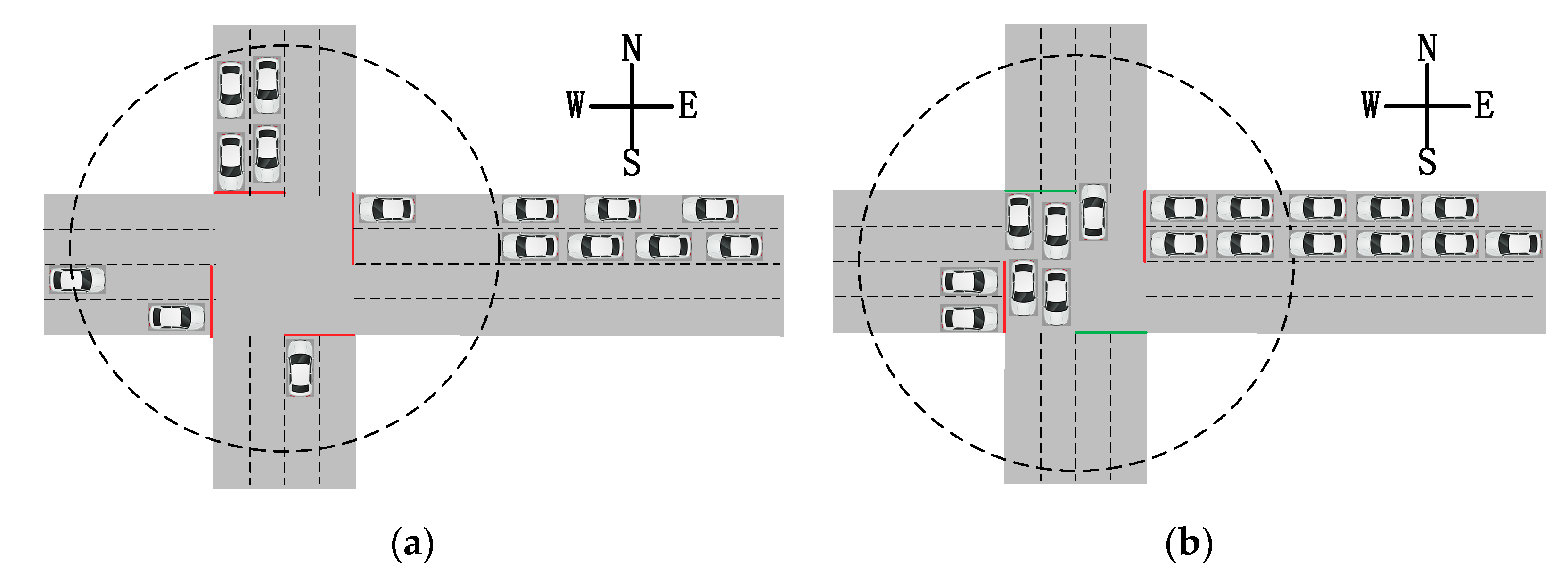
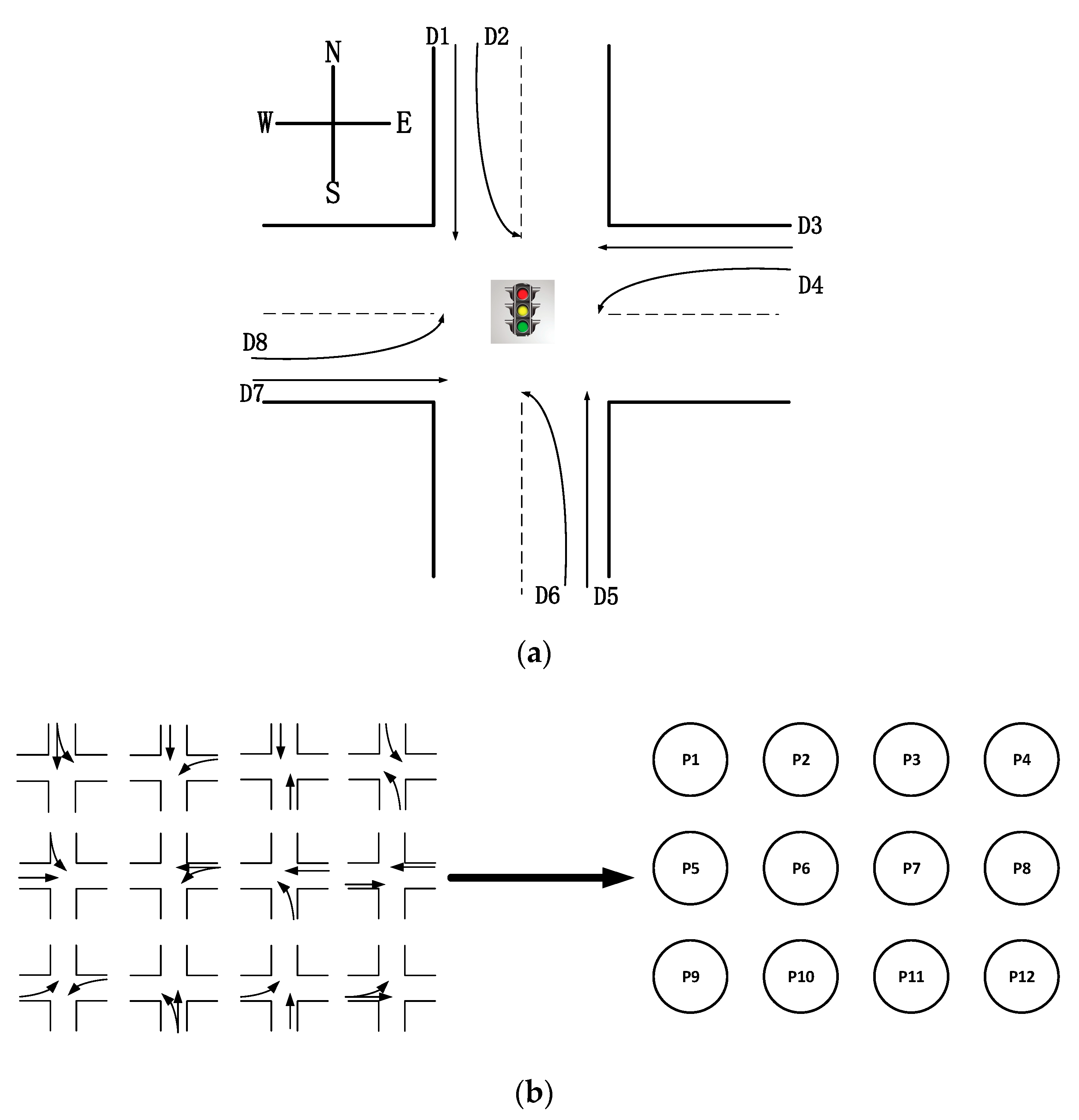
3.1. System Model and Environment Settings
3.2. Waiting Time at a Future Moment
3.3. Fixed Phase and Period Signal Timing Improvement Scheme
3.4. Dynamic Phase and Period Signal Control Scheme
3.4.1. Eliminable Waiting Time of the Traffic Flow
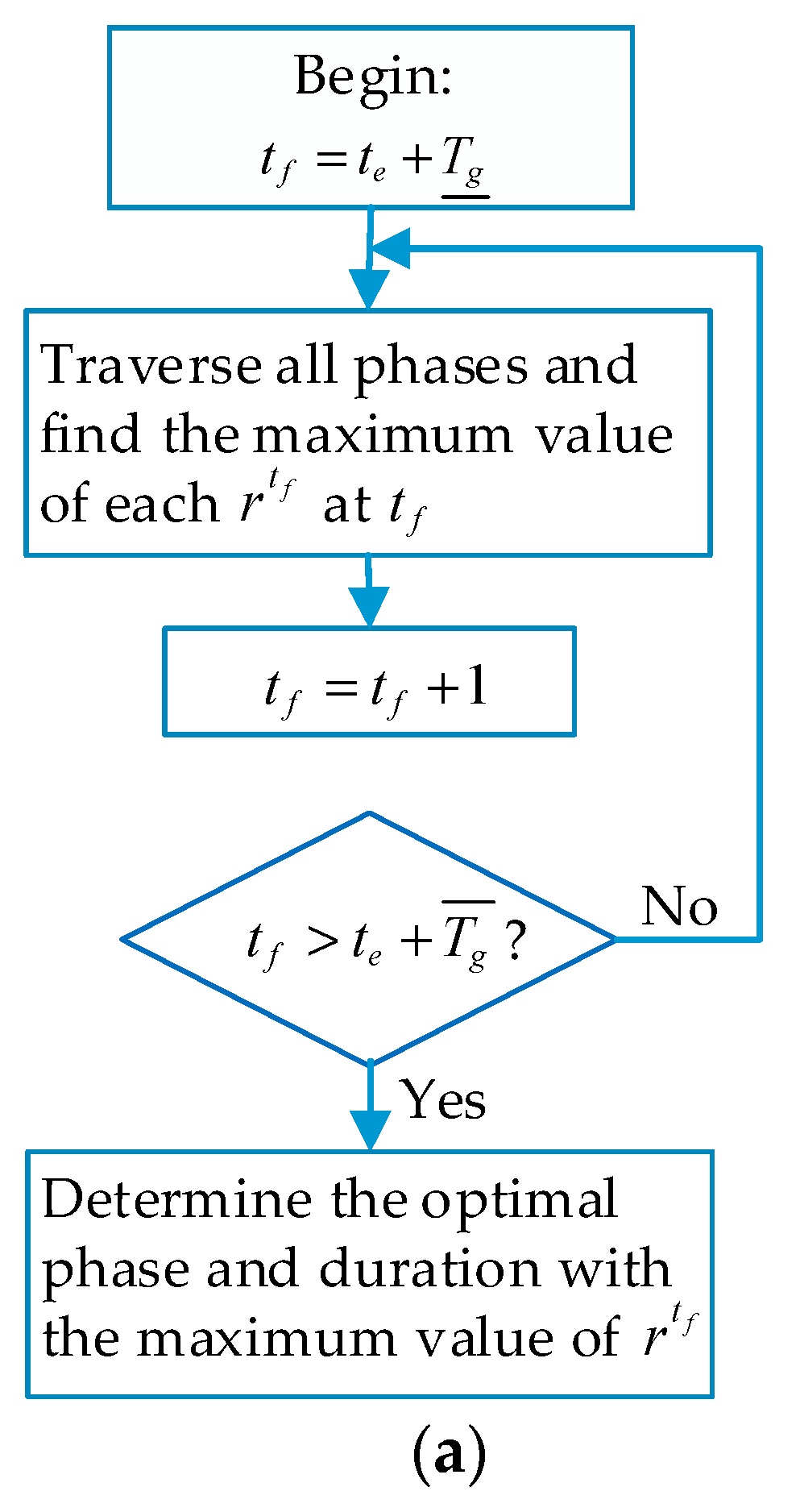
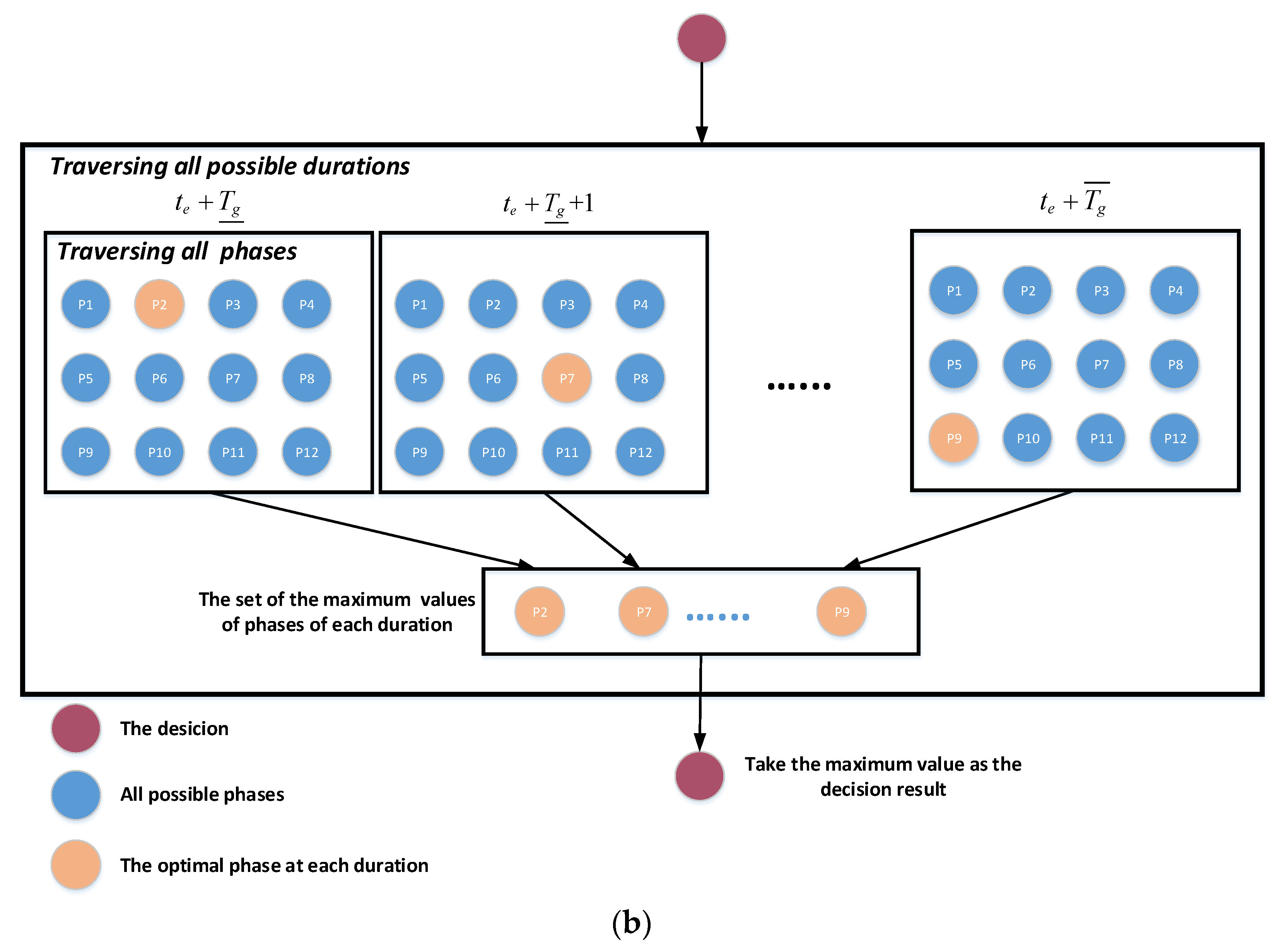
3.4.2. Decision-Making for the Combination Phase and Green Light Duration
4. Simulation and Analysis
4.1. Simulation Platform
4.2. Simulation Environment and Parameter Settings
4.3. Results and Analysis
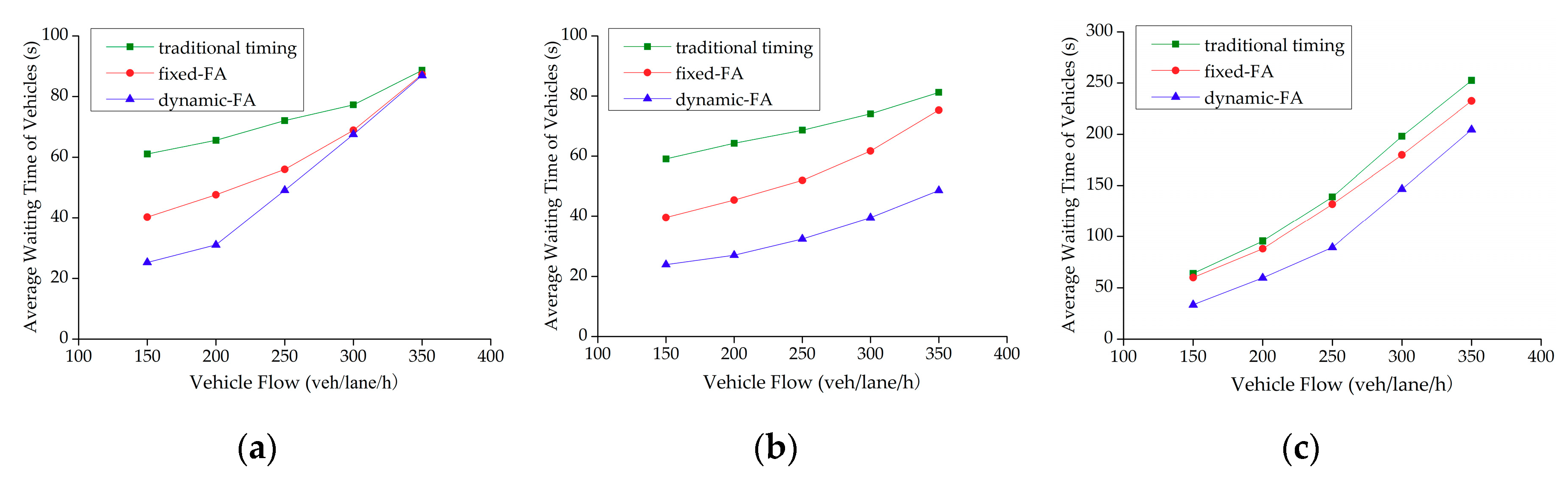
4.3.1. Average Waiting Time of Vehicles
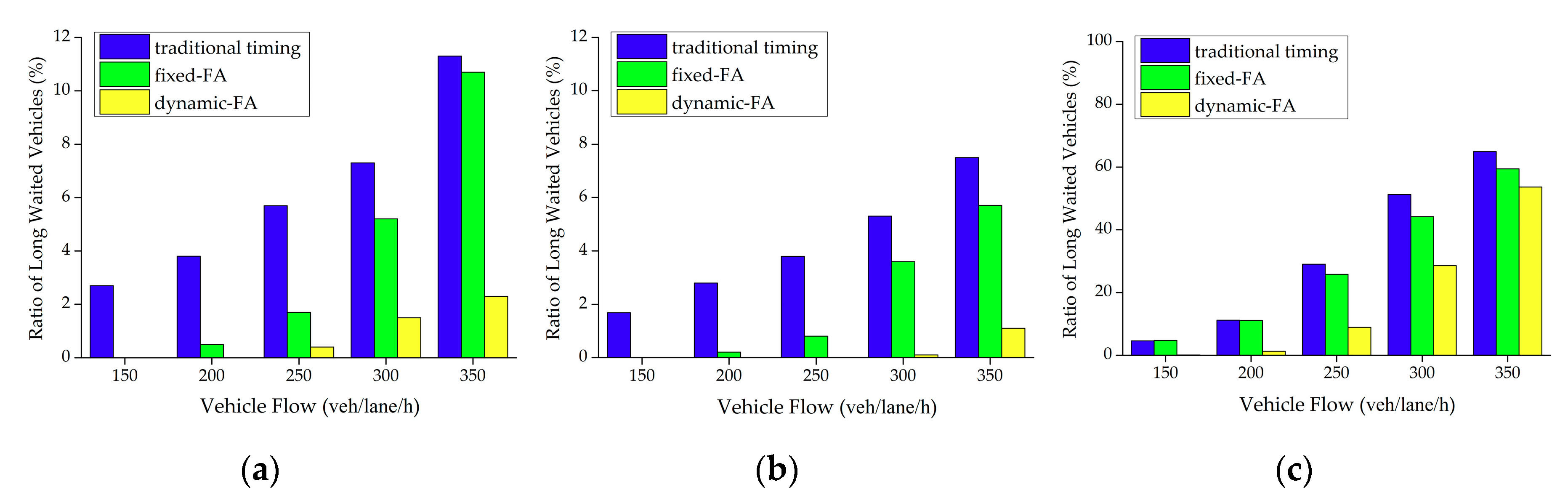
4.3.2. Ratio of Long-Waiting Vehicles
5. Conclusions and Future Works
Author Contributions
Funding
Conflicts of Interest
References
- Chen, K.; Wang, Y. Distribution characteristics and countermeasures of urban traffic accidents. J. Traffic Transp. Eng. 2003, 3, 84–87. [Google Scholar]
- Gao, Y.; Hu, H.; Han, H.; Yang, X.G. Multi-objective optimization and simulation for urban road intersection group traffic signal control. China J. Highw. Transp. 2012, 25, 129–135. [Google Scholar]
- Zang, L.; Zhu, W. Study on control algorithm of traffic signals at intersections based on optimizing sub-area traffic flows. China J. Highw. Transp. 2012, 25, 136–139. [Google Scholar]
- Lin, X. Signal control method and model for intersection based on full induction control. Mod. Transp. Technol. 2015, 1, 44–46. [Google Scholar]
- Yao, J.; Fan, H.; Han, Y.; Cui, L. Adaptive control at intersection in urban area based on probe data. J. Univ. Shanghai Sci. Technol. 2014, 36, 239–249. [Google Scholar]
- Ren, Y.; Wang, Y.; Yu, G.; Liu, H.; Xiao, L. An adaptive signal control scheme to prevent intersection traffic blockage. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1519–1528. [Google Scholar] [CrossRef]
- Xun, L.; Zhengfan, Z.; Li, L.; Yao, L.; Pengfei, L. An optimization model of multi-intersection signal control for trunk road under collaborative information. J. Control Sci. Eng. 2017, 2017, 2846987. [Google Scholar]
- Wang, F.; Tang, K.; Li, K.; Liu, Z.; Zhu, L. A group-based signal timing optimization model considering safety for signalized intersections with mixed traffic flows. J. Adv. Transp. 2019, 2019, 2747569. [Google Scholar] [CrossRef]
- Garcia-Nieto, J.; Olivera, A.C.; Alba, E. Optimal cycle program of traffic lights with particle swarm optimization. IEEE Trans. Evol. Comput. 2013, 17, 823–839. [Google Scholar] [CrossRef]
- Wang, L.; Zhao, Y.; Li, J.; Zhang, H.; Wang, X. Multi-stage decision model for signal control problems and its forward dynamic programming algorithm. Control Decis. 2012, 27, 167–174. [Google Scholar]
- Bi, Y.; Lu, X.; Sun, Z.; Srinivasan, D.; Sun, Z. Optimal type-2 fuzzy system for arterial traffic signal control. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3009–3027. [Google Scholar] [CrossRef]
- Lu, K.; Hu, J.; Huang, J.; Tian, D.; Zhang, C. Optimisation model for network progression coordinated control under the signal design mode of split phasing. IET Intell. Transp. Syst. 2017, 11, 459–466. [Google Scholar] [CrossRef]
- Sanchez-Iborra, R.; Cano, M. On the similarities between urban traffic management and communication networks: Application of the random early detection algorithm for self-regulating intersections. IEEE Intell. Transp. Syst. Mag. 2017, 9, 48–61. [Google Scholar] [CrossRef]
- Sakiz, F.; Sen, S. A survey of attacks and detection mechanisms on intelligent transportation systems: VANETs and IoV. Ad Hoc Netw. 2017, 61, 33–50. [Google Scholar] [CrossRef]
- Yang, F.; Li, J.; Lei, T.; Wang, S. Architecture and key technologies for Internet of Vehicles: A survey. J. Commun. Inf. Netw. 2017, 2, 1–17. [Google Scholar] [CrossRef]
- Wang, J.; Jiang, C.; Han, Z.; Ren, Y.; Hanzo, L. Internet of Vehicles: Sensing-aided transportation information collection and diffusion. IEEE Trans. Veh. Technol. 2018, 67, 3813–3825. [Google Scholar] [CrossRef]
- Wu, H.; Horng, G. Establishing an intelligent transportation system with a network security mechanism in an Internet of Vehicle environment. IEEE Access 2017, 5, 19239–19247. [Google Scholar] [CrossRef]
- Chen, C.; Liu, X.; Qiu, T.; Liu, L.; Sangaiah, A. Latency estimation based on traffic density for video streaming in the internet of vehicles. Comput. Commun. 2017, 111, 176–186. [Google Scholar] [CrossRef]
- Khaliq, K.A.; Chughtai, O.; Shahwani, A.; Qayyum, A.; Pannek, J. Road accidents detection, data collection and data analysis using V2X communication and edge/cloud computing. Electronics 2019, 8, 896. [Google Scholar] [CrossRef]
- Nahri, M.; Boulmakoul, A.; Karim, L.; Lbath, A. IoV distributed architecture for real-time traffic data analytics. Procedia Comput. Sci. 2018, 130, 480–487. [Google Scholar] [CrossRef]
- Al Mallah, R.; Quintero, A.; Farooq, B. Distributed classification of urban congestion using VANET. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2435–2442. [Google Scholar] [CrossRef]
- Lin, Y.; Rubin, I. Integrated message dissemination and traffic regulation for autonomous VANETs. IEEE Trans. Veh. Technol. 2017, 66, 8644–8658. [Google Scholar] [CrossRef]
- Oche, M.; Tambuwal, A.B.; Chemebe, C.; Noor, R.M.; Distefano, S. VANETs QoS-based routing protocols based on multi-constrained ability to support ITS infotainment services. Wirel. Netw. 2018, 24, 1–31. [Google Scholar] [CrossRef]
- Chanana, P.; Prabhat, N. Scalable intersection based vehicular ad-hoc network supporting QOS. Int. J. Comput. Appl. 2015, 125, 11–15. [Google Scholar] [CrossRef]
- Sharma, S.; Sah, M.K.; Malhotra, A. An intersection based traffic monitoring using VANET. Int. J. Comput. Appl. 2015, 117, 25–30. [Google Scholar] [CrossRef]
- Lin, P.Q.; Zhuo, F.Q.; Yao, K.B.; Ran, B.; Xu, J.M. Solving and simulation of microcosmic control model of intersection traffic flow in connected-vehicle network environment. China J. Highw. Transp. 2015, 28, 82–90. [Google Scholar]
- Lin, P.; Liu, J.; Jin, P.J.; Ran, B. Autonomous vehicle-intersection coordination method in a connected vehicle environment. IEEE Intell. Transp. Syst. Mag. 2017, 9, 37–47. [Google Scholar] [CrossRef]
- Chang, H.J.; Park, G.T. A study on traffic signal control at signalized intersections in vehicular ad hoc networks. Ad Hoc Netw. 2013, 11, 2115–2124. [Google Scholar] [CrossRef]
- Hemakumar, V.; Nazini, H. Optimized traffic signal control system at traffic intersections using VANET. In Proceedings of the IET Chennai Fourth International Conference on Sustainable Energy and Intelligent Systems (SEISCON 2013), Chennai, India, 12–14 December 2013; pp. 305–312. [Google Scholar]
- Zhao, J.; Li, W.; Wang, J.; Ban, X. Dynamic traffic signal timing optimization strategy incorporating various vehicle fuel consumption characteristics. IEEE Trans. Veh. Technol. 2016, 65, 3874–3887. [Google Scholar] [CrossRef]
- Sayin, M.O.; Lin, C.W.; Shiraishi, S.; Shen, J.; Tamer, B. Information-driven autonomous intersection control via incentive compatible mechanisms. IEEE Trans. Intell. Transp. Syst. 2019, 20, 912–924. [Google Scholar] [CrossRef]
- Lu, Y.R.; Xu, X.T.; Ding, C.; Lu, G.Q. A speed control strategy at signalized intersection under connected vehicle environment. J. Transp. Syst. Eng. Inf. Technol. 2018, 18, 50–58. [Google Scholar]
- Guo, C.; Li, D.; Zhang, G.; Zhai, M. Real-time path planning in urban area via vanet-assisted traffic information sharing. IEEE Trans. Veh. Technol. 2018, 67, 5635–5649. [Google Scholar] [CrossRef]
- Sommer, C.; German, R.; Dressler, F. Bidirectionally Coupled Network and Road Traffic Simulation for Improved IVC Analysis. IEEE. Trans. Mob. Comput. 2011, 10, 3–15. [Google Scholar] [CrossRef]
- Lim, K.G.; Lee, C.H.; Chin, R.K.Y.; Yeo, K.B.; Teo, K.T.K. SUMO enhancement for vehicular ad hoc network (VANET) simulation. In Proceedings of the 2017 IEEE 2nd International Conference on Automatic Control and Intelligent Systems (I2CACIS 2017), Kota Kinabalu, Malaysia, 12–21 October 2017; pp. 86–91. [Google Scholar]
- Musaddiq, A.; Hashim, F. Multi-hop wireless network modelling using OMNET++ simulator. In Proceedings of the 2015 International Conference on Computer, Communications, and Control Technology (I4CT 2015), Kuching, Malaysia, 21–23 April 2015; pp. 559–564. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Description |
|---|---|
| Current moment | |
| Future moment | |
| Capacity of the road | |
| Number of vehicles in the “island” | |
| Real-time velocities at | |
| Real-time positions at | |
| The time that the vehicle has been waiting for | |
| Estimated waiting time of vehicle j | |
| Estimated waiting time of traffic flow i | |
| ith signal phase | |
| Number of vehicles in flow i that have stopped at | |
| The vehicles in the ith traffic flow that can pass the intersection in | |
| Adjusted waiting time | |
| The eliminable waiting time of the phase |
| Traffic Flow: 250 veh/lane/h | Fixed-FA | Dynamic-FA | ||
|---|---|---|---|---|
| Average Waiting Time | Confidence Interval (95%) | Average Waiting Time | Confidence Interval (95%) | |
| Same even traffic flows | 56.05 s | (54.75, 57.35) | 49.08 s | (45.21, 52.95) |
| Same uneven traffic flows | 51.91 s | (51.19, 52.63) | 32.66 s | (31.32, 34) |
| Different traffic flows | 131.8 s | (125.63, 137.96) | 89.47 s | (83.52, 95.42) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cai, Z.; Deng, Z.; Li, J.; Zhang, J.; Liang, M. An Intersection Signal Control Mechanism Assisted by Vehicular Ad Hoc Networks. Electronics 2019, 8, 1402. https://doi.org/10.3390/electronics8121402
Cai Z, Deng Z, Li J, Zhang J, Liang M. An Intersection Signal Control Mechanism Assisted by Vehicular Ad Hoc Networks. Electronics. 2019; 8(12):1402. https://doi.org/10.3390/electronics8121402
Chicago/Turabian StyleCai, Zhen, Zizhen Deng, Jinglei Li, Jinghan Zhang, and Mangui Liang. 2019. "An Intersection Signal Control Mechanism Assisted by Vehicular Ad Hoc Networks" Electronics 8, no. 12: 1402. https://doi.org/10.3390/electronics8121402