
Digital Twin-Enabled Internet of Vehicles Applications

 ,
,
Abstract
:
1. Introduction
- 1.
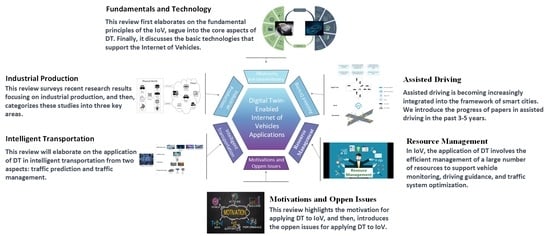
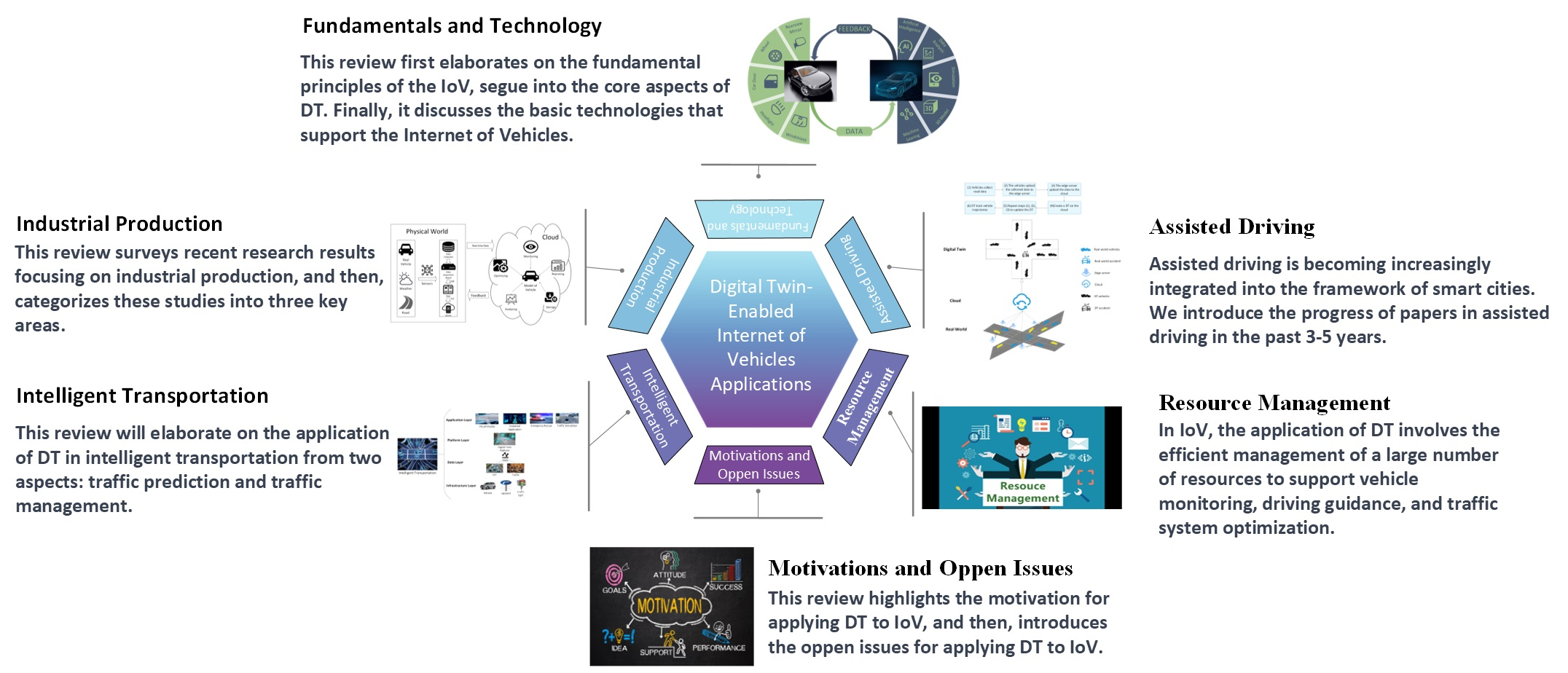
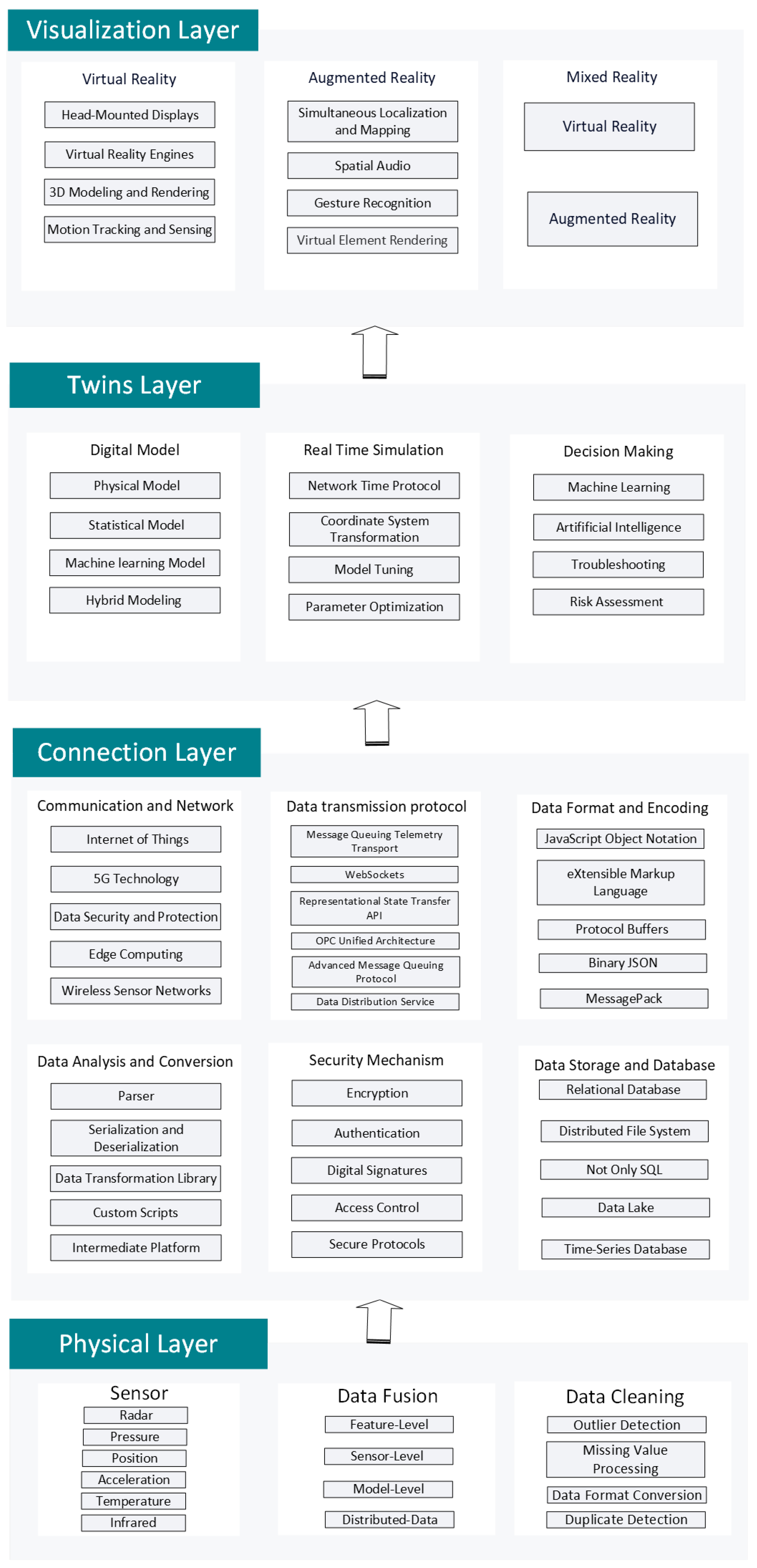
- This paper provides foundational aspects of IoV and DT, demystifying prevalent misconceptions and positing a stratified four-layer architecture—Physical, Connection, Twin, and Visualization Layers.
- 2.
- IoV’s challenges in industrial production, assisted driving, intelligent transportation, and resource management are identified and explored, proposing how DT can address these issues due to its inherent capabilities.
- 3.
- This review adopts a unique classification of DT’s recent IoV applications over the past 3–5 years into four categories according to the application direction, presenting a fresh perspective and comprehensive analysis that offers clear insights and research directions.
- 4.
- Open questions regarding DT’s incorporation into IoV are discussed. It proffers prospective trajectories for constructing a DT-infused IoV landscape, thereby expanding the theoretical and practical horizons for academicians. In addition to the technical issues, we also discussed the opening issues in the implementation process and future research directions to accelerate the innovative development of DT-based IoV.
2. Fundamentals and Technology
2.1. Fundamentals
2.1.1. Fundamentals of IoV
2.1.2. Initial Definition of DT
2.1.3. Evolving Definitions
2.1.4. Misconceptions of DT
- 1.
- DT and AR/VR: Some people confuse DT with virtualization technologies such as AR/VR [58]. Although AR and VR can be used in combination with DT, DT is much more than these technologies. DT involves a broader range of concepts, including modeling and analysis of simulation, mirroring, and prediction of the integrity of physical entities. AR/VR is just a tool for DT to realize visualization.
- 2.
- DT and 3D Modeling: Some people simply understand DT as 3D modeling [59]. DT not only includes the geometry of objects but also involves the simulation and analysis of object behavior, performance, sensor data, and other aspects in addition to simple 3D modeling. On the other hand, building DT does not necessarily mean that 3D modeling is necessary. The scope of modeling and analysis of DT is more extensive, which can cover multiple aspects, not limited to the representation of 3D shapes.
- 3.
- DT and CPS: CPS is a system of physical and computing resources. It mainly realizes functions through the interaction of physical and virtual components. The main goal of CPS is to achieve the integration of the physical world and computing, so as to achieve the purpose of real-time monitoring, control, and decision-making. DT simulates, twins, and predicts physical entities through digital models and real-time data. The main goal of DT is to build virtual digital representations for physical entities to achieve optimal design and maintenance. Additionally, CPS is primarily used in automation, intelligent manufacturing, and other fields, while DT is mostly used in industries with physical entities for performance simulation [60].
- 4.
- DT’s Own Misconception: In addition to the inherent misconceptions about DT mentioned above, there are internal misconceptions about what DT is or should be:
- Static Digital Models: Some assume that once a DT model is created, it remains static and does not update according to changes in the physical entity [61].
- Digital Shadows: This concept implies a one-way data flow from the physical world to its DT. Changes in the digital world do not affect the physical entity and thus lack predictive and control capabilities [62].
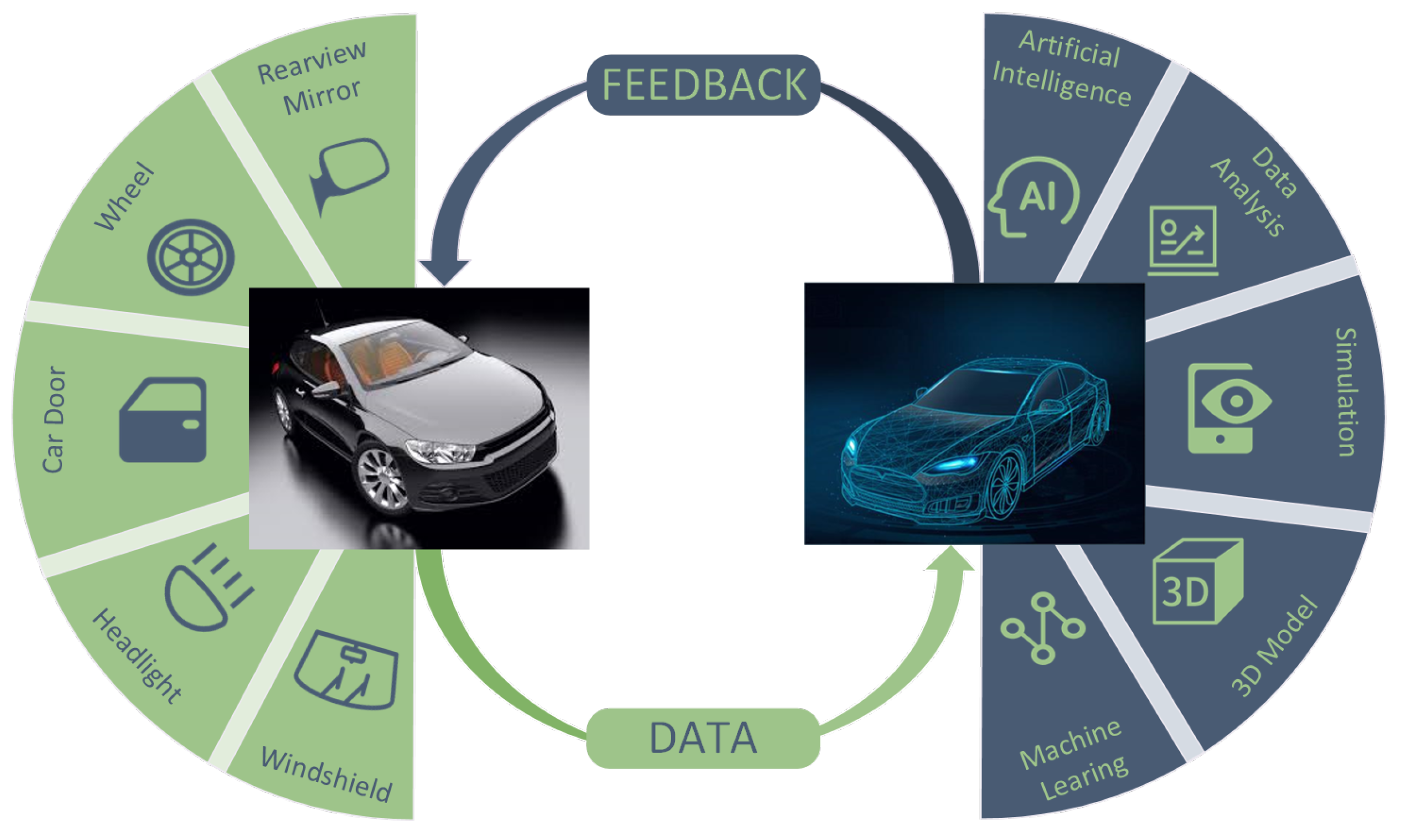
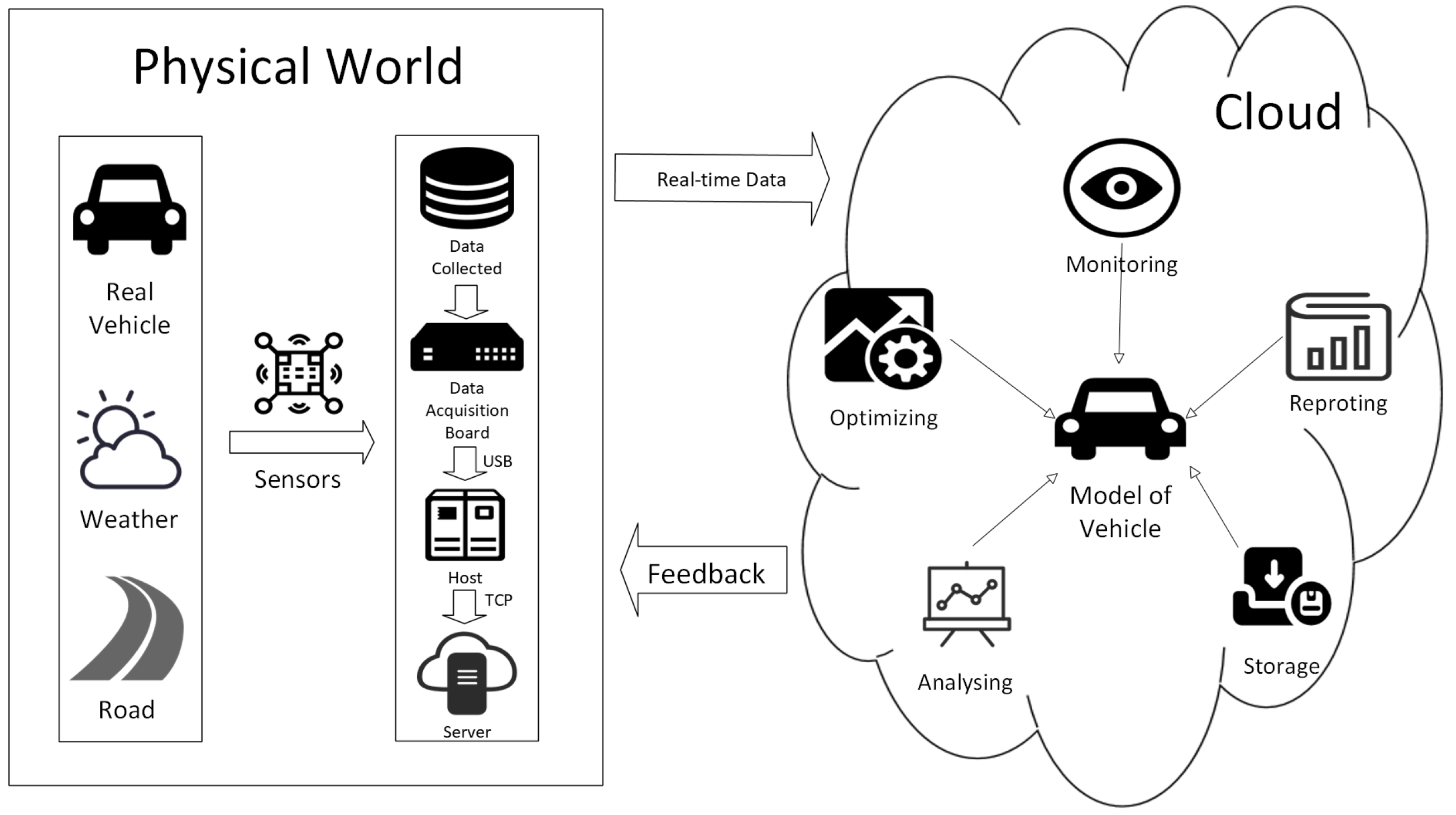
- True DT: A true DT involves a bidirectional data flow, allowing both the physical and virtual realms to influence each other. Only with this two-way communication can DT offer robust support for real-time monitoring, optimization, and maintenance.
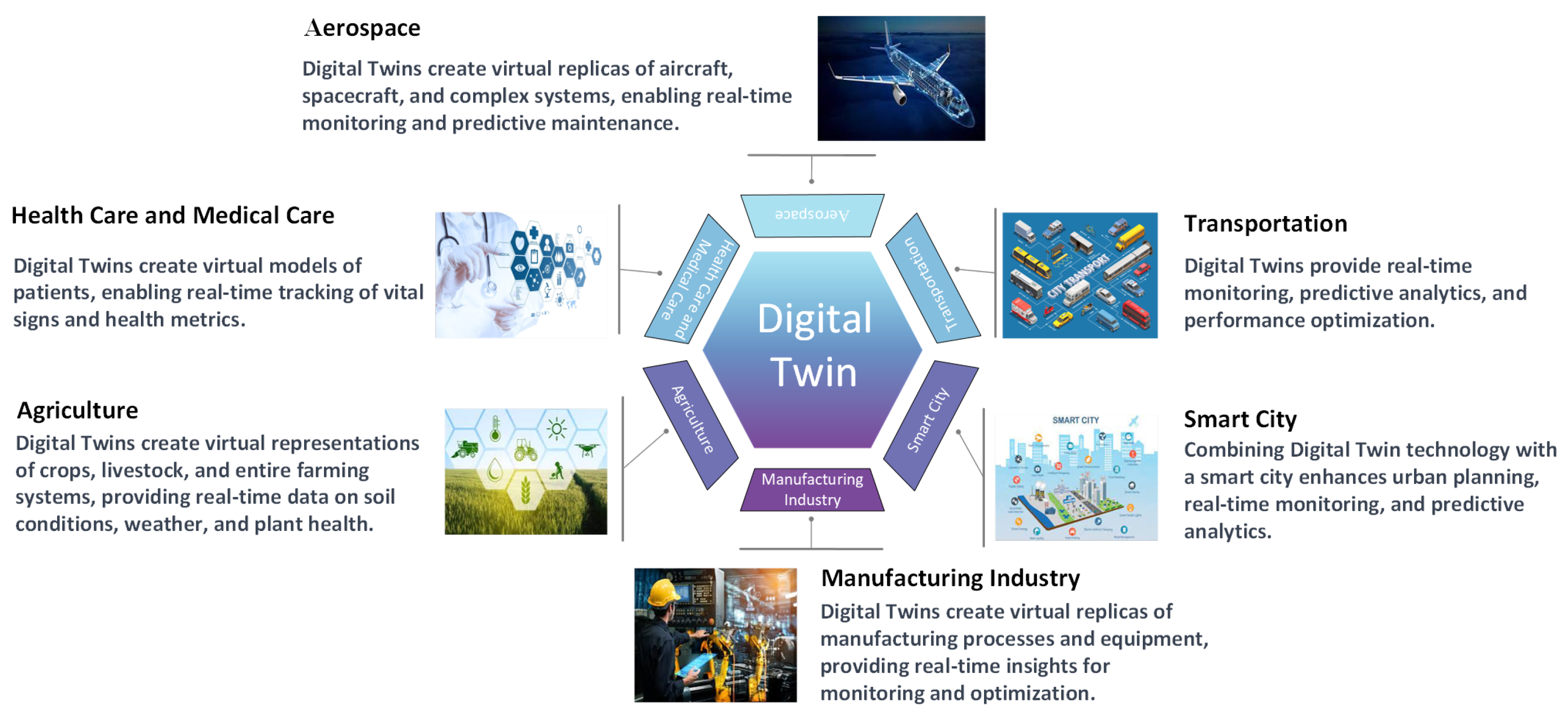
2.1.5. Applications of DT
- 1.
- Aerospace: In aerospace, DT technologies are leveraged for predicting component failures, thereby reducing maintenance costs. For instance, the U.S. Air Force Research Laboratory (AFRL) developed a comprehensive DT of an aircraft to monitor its real-time data and foresee potential failures. This results in cost-effective and timely preventive maintenance, enhancing the longevity and reliability of the aircraft [63]. Other studies develop reusable DT tools that simulate and optimize the manufacturing process of aircraft components [64] and high-precision monitoring of spacecraft components [65].
- 2.
- Health Care and Medical Care: DT has extensive applications in the healthcare sector, enhancing the quality, efficiency, and personalization of medical services, including medical diagnosis, surgical planning, equipment design, and process optimization. There is research that focuses on using machine learning techniques to analyze cancer-related data and construct a precise breast cancer DT model [66]. Medical professionals can use this model to simulate and predict patients’ cancer progression, treatment response, and prognosis. This modeling approach facilitates personalized diagnosis and treatment decisions and can provide more accurate disease assessment and treatment options. To simulate and optimize various aspects of the healthcare system, including healthcare processes, resource management, patient care, and equipment utilization by creating DT models, Mohamed et al. model and simulate the system to identify potential bottlenecks and improvement opportunities and provide practical solutions [67]. Lv et al. focus on using DT to assist in the diagnostic process of healthcare [68]. Disease-related data, including patient symptoms, physiological parameters, and medical records, are collected through a client application. Subsequently, these data are utilized to create DT models for a better understanding of disease progression trends and potential patterns.
- 3.
- Agriculture: Alves et al. comprehensively consider soil, crop, and weather data and design a DT model to calculate the most suitable irrigation water amount. This intelligent irrigation system can provide precise irrigation recommendations based on real-time environmental conditions and crop requirements, reducing waste and enhancing the efficiency of water resource utilization [69]. Fatima et al. spread knowledge widely to farmers by creating DT models of agricultural knowledge [70]. Farmers can use these models to understand agricultural practices such as optimal seed selection, soil management, and irrigation strategies under specific conditions. Chen et al. focus on creating a DT model for transplant machines of plant factories, which is capable of five-dimensional modeling. By collecting and integrating the sensor data of the machine, the working status of the transplanted machine can be monitored in real-time [71].
- 4.
- Manufacturing Industry: Considering the quality problems that may occur in the process of manufacturing new products, DT is created for manufacturing tasks through heterogeneous information networks driven by digital threads to accurately simulate and monitor the manufacturing process of products, including design, raw material selection, production process, and other aspects, so as to achieve the control of the overall product production process [10]. To meet the needs of discrete workshops, Chao et al. propose a DT unit, then a multidimensional and multi-scale DT model and modeling method are developed based on this unit [72]. This approach can comprehensively simulate all aspects of the discrete workshop and provide detailed multi-scale analysis to help optimize the production process and improve efficiency and quality. In order to solve the problems of low precision and late response of discrete production lines, a thought fusion modeling method is proposed by Xie to optimize the DT system architecture of discrete production lines [73]. In this way, knowledge and technology from multiple fields are integrated, and information and data from all links are integrated to achieve comprehensive modeling and optimization of discrete production lines to improve the accuracy, efficiency, and responsiveness of production lines.
- 5.
- Smart City: In order to create an intelligent and sustainable smart city, Nica et al. use predictive modeling algorithms to create a DT for the city and combine it with deep learning and other technologies to achieve efficient smart city management [74]. City managers can better understand the needs and challenges of the city, formulate corresponding planning and decision-making, optimize resource utilization, and provide better urban services. Wang et al. create a five-dimensional DT model of the city [75]. Based on that, edge computing is introduced to expand the data processing and decision-making ability from the central server to the edge device close to the data source. The model can provide real-time data analysis and responses, which enable DT to perceive and predict traffic conditions in real time and support intelligent traffic management and decision-making. Kuru et al. construct a high-fidelity metaverse interactive virtual world, implant it into the urban management system, and propose an ecological framework for the urban metaverse [76]. In this city meta-universe ecological framework, they connect the virtual world with the actual urban management system and realize real-time data transmission and sharing through data exchange and integration with the city management system.
- 6.
- Transportation: Aiming at micro expressway simulation and real-time data integration during system operation, a DT modeling method for traffic data flow on expressway traffic is proposed by Kuvsic [77]. This DT can provide more precise and accurate traffic simulation results. Through the simulation and analysis of key indicators such as traffic flow, speed, and congestion, it can evaluate the performance of the traffic system, predict traffic congestion, and propose optimization measures. Nie et al. utilize the advantages of DT in network management in the transportation system, and a network traffic prediction algorithm is proposed [78]. Through the construction of DT, the traffic flow in the traffic network can be accurately simulated and analyzed, and the operation status of the network can be monitored in real-time. In order to solve the problem of COVID-19 medical waste transportation, a DT driven framework model is proposed by Cao to optimize waste collection and transportation routes and improve the efficiency and reliability of transportation by real-time monitoring and forecasting the generation and distribution of medical waste [79].
2.2. DT Enabling Technologies
2.2.1. Physical Layer
- 1.
- Sensor Technology: Physical entities rely on sensor technology to collect and detect data and upload them in real-time [80]. According to different DT applications and needs, different types of sensors are used to meet specific detection and acquisition requirements. Current sensors mainly include temperature sensors, pressure sensors, acceleration sensors, radar, infrared sensors, and position sensors.
- 2.
- Data Fusion Technology: The construction of DT requires comprehensive data from multiple directions and angles, but a single sensor cannot obtain such data. Therefore, in the face of heterogeneous data generated by multiple sensors, how to integrate these data is a challenge [81]. Current data-fusion technologies include sensor-level fusion, which can fuse the same type of sensor data to obtain more reliable data in this dimension; feature-level data fusion, which achieves the purpose of data fusion by extracting and integrating different data features and attributes, mainly for data such as image, text, voice and other data; model-level data fusion, which integrates outputs from different models through integrated learning, model integration, model fusion and other methods; and distributed-data fusion, which requires the use of distributed computing and collaborative algorithms to fuse data from different locations.
- 3.
- Data Cleaning Technology: There may be a lot of noise, missing, or errors in the fused data. Unprocessed data may impact the construction of the virtual world at the twin level, leading to errors or failures in model construction [82]. Therefore, data cleaning technology is needed to detect and correct data errors and provide accurate, complete, and reliable data for the system. Current data cleaning technologies include missing value processing, outlier detection, duplicate detection, and data format conversion.
2.2.2. Connection Layer
- 1.
- Communication and Network Technology: Communication and network technologies play a vital role in implementing DT. Here are some common communication and network technologies. First, the IoT technology connects physical objects to the Internet through wireless sensor devices so that data can be shared between various devices [83]. The second is 5G technology, which creates transmission conditions for DT because of faster transmission speed, lower latency, and greater network capacity [84]. Then there is data security and protection technology [85]. The communication between the physical world and the twin needs to protect the security of both parties and the privacy of data. Therefore, some security mechanisms, such as encryption technology, access control, and authentication, are required to ensure the security of data storage and transmission. In addition, technologies such as edge computing can also be used to build a two-way bridge between the physical world and the twin, which can reduce network latency and improve real-time interaction efficiency [86]. Finally, wireless sensor networks are often used in the IoT, where sensor nodes can communicate directly with the twin to provide real-time data [87].
- 2.
- Data transmission protocol: In DT, data transmission technology is widely used in the interaction and communication between physical entities and the twin. The following are some common data transmission protocols to ensure the real-time communication of DT.
- Message Queuing Telemetry Transport (MQTT) [88]: MQTT is a lightweight message transmission protocol that supports the publish–subscribe model and can provide good real-time communication between devices with low energy consumption and DT.
- WebSockets [89]: WebSockets is a duplex communication technology, generally used between the web browser and server, which can provide long-term connection and support two-way communication between DT.
- Representational State Transfer API (RESTful API) [90]: This protocol is a web service architecture based on the HyperText Transfer Protocol (HTTP) protocol. It defines a good API interface and can request and respond to real-time communication between DTs.
- OPC Unified Architecture (OPC UA) [91]: OPC UA is a communication protocol and data model with security, reliability, and interoperability, which is now primarily used to provide real-time connection for automated plants.
- Advanced Message Queuing Protocol (AMQP) [88]: This protocol is message-oriented and can realize real-time communication and data transmission in a distributed environment. It is characterized by high performance and low latency.
- Data Distribution Service (DDS) [92]: DDS is a data distribution and communication protocol that supports the publication and subscription of real-time data and is used to realize real-time high-performance communication between systems. It has the characteristics of reliability, real-time, and scalability.
- 3.
- Data Format and Encoding Technology: In DT, the physical entities are diversified, and the data is highly heterogeneous. If the data format and encoding are not unified, it will bring great trouble to the creation of DT. Here are some data formats and coding technologies.
- JavaScript Object Notation (JSON) [93]: It is a lightweight data exchange format that uses key-value pairs to represent data. It can simply express data objects and nested structures. Also, it is very friendly for writing and reading.
- eXtensible Markup Language (XML) [94]: XML is a pervasive markup language used to describe data structures. It is extensible and readable and can represent complex data structures.
- Protocol Buffers [95]: Protocol Buffer is more suitable for large-scale data transmission, can define structured data as a message format, and provides an efficient encoding method. It is a lightweight data serialization protocol.
- Binary JSON (BSON) [96]: BSON is extended based on JSON for efficient storage and transmission. It not only has the flexibility of JSON but also improves efficiency through binary encoding, which can reduce data transmission consumption.
- MessagePack [97]: It is a binary data serialization format, mainly used for data exchange in different programming languages, and can be quickly encoded and decoded. Also, it can provide high-performance data transmission.
- 4.
- Data Analysis and Conversion Technology: Generally, there may be differences in the structure and format between the data of the digital model and the data of the physical entity in the twin. At this time, data analysis and conversion technologies are required to convert the data of both sides into acceptable data. Here are some methods.
- Parser [98]: It is a convertible data format. Different parsers have different functions. For example, JSON parsers can parse JSON data into internal data or XML data into operable data objects.
- Serialization and deserialization [99]: Serialization is the process of converting different data objects into specific formats (JSON, XML, binary.). The process of deserialization, on the contrary, is the process of reversing formatted data into data objects. Through serialization and deserialization, data transmission between DT will become easier.
- Data transformation library [100]: It provides a lot of data transformation and mapping, such as Extensible Stylesheet Language Transformations, which provides methods for transforming XML into other formats.
Additionally, data can be converted into special formats by writing programs and custom scripts. Furthermore, data can also be converted through the intermediate platform. All data is collected in the intermediate platform, which judges and converts by itself, and then allocates data in the corresponding format under different requirements. - 5.
- Security Mechanism: In DT, not only the communication quality should be considered, but communication security is also essential. Regardless of data leakage or corruption, DT will be hit. Therefore, a certain security mechanism is required to ensure the data security.
- Encryption [101]: Encryption is a common data protection mechanism. The encryption mechanism converts data into ciphertext for transmission, which can effectively prevent unauthorized terminals from accessing data. Encryption mechanisms are generally divided into one-way, two-way, symmetric, asymmetric, digital signature, and other encryption methods.
- Authentication [102]: Authentication can ensure that the objects accessing the database are authenticated and can effectively reduce the access of malicious nodes to the database through digital certificates and other methods.
- Digital Signatures [103]: Digital Signatures ensure the integrity and authenticity of data. Digital Signatures can ensure that the data has not been tampered with by verifying the signature and can also trace the identity of the data sender, which can ensure the security of data reception.
- Access Control [104]: When sensitive resources or system resources are accessed, Access Control can be used to manage access permissions according to different access requirements through operations such as access control and permissions management.
- Secure Protocols [105]: Secure Protocols are required to ensure data security during data transmission.
- 6.
- Data Storage and Database: In the process of DT creation and operation, a large amount of data transmission will occur. However, how to store these data is also a problem that needs to be considered. Some data storage methods are introduced below.
- Relational Database [106]: It stores data through table structure, support queries, and applies to structured data.
- Not Only SQL [107]: Contrary to Relational Database, it is a non-relational database suitable for storing unstructured or semi-structured data, such as documents and graphs. The database has high flexibility and scalability.
- Data Lake [108]: Data lake can store a large amount of raw data that has yet to be processed. It can store structured, semi-structured, and unstructured data. It is suitable for storing underlying data in DT and can be analyzed by DT.
- Time Series Database [109]: Time Series Database can store data related to time, such as real-time sensor detection data.
- Distributed File System [110]: This storage mode has high reliability and scalability. It is usually used to manage large amounts of data.
In addition, blockchain [111], as a distributed ledger structure, is often used to store data. Since blockchain has characteristics such as tamper-proof and transparency, the application of blockchain technology in DT is a more secure storage method.
2.2.3. Twin Layer
- 1.
- Digital Model: The digital model is the digital representation of physical entities, which is used to describe the characteristics and behaviors of physical entities. It is the core component of DT. The digital model describes and predicts physical entities through algorithms. Common digital models are as follows.
- Physical model [112]: The physical model is created based on the physical characteristics of the entity through mathematical formulas, physical equations, and parameters and is used to describe the modeling method of the physical characteristics of the entity.
- Statistical model [113]: Statistical model refers to statistics and probability theory and is usually used for statistics and to predict the behavior of entities. The statistical model can analyze the historical data using statistical methods to analyze the trend and probability distribution of the system and then predict and optimize the system. Classical statistical models include regression models, time series models, and stochastic processes.
- Machine learning model [114]: The development of machine learning makes DT automation possible. Machine learning is a data and algorithm-driven model that is good at learning from data and extrapolating the development of transactions. The original machine learning model can be used for classification, prediction, and clustering. With the increasing interest of researchers in machine learning, machine learning has been able to handle more complex tasks.
- Hybrid model [115]: It creates a multi-dimensional and comprehensive digital model of physical entities by mixing different models. Physical models can be used to create physical properties of entities, and machine learning models can be used to predict and simulate the behavior of the system. This approach can integrate the advantages of the above models.
- 2.
- Real-Time Simulation: Since DT is a process that requires real-time communication and real-time decision-making, real-time simulation technology is required to update the digital model that has been built according to the changes of physical entities over time [116]. Real-time simulation can provide the simulation results and feedback of physical entities and digital models at any time so that the two worlds of DT can be interoperable. It should be noted here that real-time simulation requires real-time data input: that is, it needs to receive the data of physical entities such as sensors in real-time and then upload it to the digital model in time. The digital model updates the status and parameters through input and simulates the changes in physical entities. After the twin gets the simulation results, it also needs to transmit them to the physical entity in real-time to control the operation of the physical entity. In this process, real-time simulation needs to provide interaction and feedback between the twin and the physical world.
- 3.
- Decision Making: DDT is different from digital models and digital shadows. DT can receive changes in the physical world. Then, it predicts and simulates the twin corresponding to the entity according to the requirements. In this process, the twin needs to analyze the data of the physical entity, make decisions, and then issue orders to the entity, which is the central control part. With the development of machine learning and artificial intelligence, many learning methods can support decision-making, and different machine learning methods can be used according to different needs. For example, suppose a user wants to know about road congestion when leaving work, the system can predict the traffic situation according to the historical data and the current accident data of the road section. At this time, the learning model that is good at prediction can be used. If the user needs assisted driving, the twin needs multiple functions such as finding routes, optimizing routes, and avoiding obstacles. Decision-making can provide accurate simulation results for physical entities, help users make correct choices, and improve system operation efficiency.
2.2.4. Visualization Layer
3. Motivations of This Survey
3.1. IoV Challenges
3.1.1. Challenges in Industrial Production
3.1.2. Challenges in Assisted Driving
3.1.3. Challenges in Intelligent Transportation
3.1.4. Challenges in Resource Management
3.2. Motivation of DT Application on IoV
4. Applications of DT in IoV
4.1. Industrial Production
4.1.1. Design and Optimization
4.1.2. Fault Diagnosis and Maintenance
4.1.3. Vehicle Health Monitoring
4.2. Assisted Driving
4.2.1. Path Planning
4.2.2. Automatic Driving
4.3. Intelligent Transportation
4.3.1. Traffic Prediction
4.3.2. Traffic Management
4.4. Resource Management
4.4.1. Resource Scheduling
4.4.2. Resource Sharing
5. Open Issues
5.1. Physical Layer
5.2. Connection Layer
5.3. Twin Layer
5.4. Visualization Layer
5.5. Implementation Issues
5.6. Further Research
- Data privacy and security: For DT-enabled IoV applications, data privacy and security must be fully considered to ensure system robustness and user trust. In future work, further research and development of data privacy protection technology for DT-enabled IoV applications is needed. For example, strengthen research privacy-protecting data sharing models to promote data sharing and collaboration. In addition, the security of DT-enabled IoV applications should be strengthened, secure software update and maintenance mechanisms should be developed, and vulnerability repair strategies should be implemented to ensure that the system is always in the latest security state to prevent malicious attacks and data leaks. By placing data privacy and security in a more prominent position, it will help promote the sustainable development of DT-enabled IoV applications and provide users with more secure and reliable services.
- Advanced data analysis technology for real-time vehicle monitoring: High-speed moving vehicles quickly generate large amounts of data, and how to analyze the data in real time requires in-depth exploration, for example, using predictive machine learning methods, using historical data for prediction and real-time data for verification and correction; developing anomaly detection systems to detect abnormal vehicle behavior or performance deviations for timely intervention and maintenance; and exploring rapid data fusion solutions from multiple sources can also speed up data analysis.
- Novel methods for enhancing vehicle-to-vehicle communication protocols: Current research focuses on how to enhance the connection between vehicles and edge servers or cloud servers, but communication between vehicles may have problems such as delays and disconnections. To address this problem, secure and decentralized communication can be achieved between vehicles by introducing blockchain to achieve secure data exchange. In addition, collaborative sensing technology can enhance traffic environment perception by sharing vehicle sensor data and perception information. Adaptive communication protocols can automatically adjust communication parameters based on factors such as network congestion, communication distance, and vehicle density. This method can optimize communication performance and ensure that vehicles maintain communication stability and reliability under different environmental conditions. Artificial intelligence technologies such as deep learning and reinforcement learning can help optimize the design and parameter settings of communication protocols and improve communication efficiency and performance by analyzing fused data and interactive information.
- Adaptive control system for autonomous vehicles: Reinforcement learning algorithms can enable autonomous vehicles to learn and optimize control strategies through interaction with the environment, so that the vehicle can gradually learn and improve driving strategies through continuous trial and error to cope with various complex driving scenarios. The model predictive control algorithm can predict the dynamic behavior and environmental response of the vehicle and adjust the control input in real time to achieve optimized driving performance, thereby achieving adaptive adjustment of the control strategy to achieve stable vehicle motion and safe driving. Swarm intelligence algorithms can search and optimize complex control parameter spaces to find optimal control strategies and achieve efficient adaptive control. Model recognition technology models and identifies the dynamic behavior of the vehicle and environment and adjusts the control strategy in real time to adapt to changing driving conditions to achieve precise autonomous driving control.
- Cyber-security measures used to secure the IoV ecosystem: In addition to the above issues, it is crucial to protect the security of the IoV ecosystem, prevent cyber attacks and threats, ensure the stable operation of the IoV ecosystem, and protect user data and privacy. By strengthening the identity authentication and access control mechanisms, we ensure that only authorized users can access the resources of the IoV ecosystem, perform specific operations, and access sensitive data, thereby increasing the data security of the IoV ecosystem. Further research on data encryption and decryption mechanisms can ensure the authenticity of the data by ensuring that the data is not eavesdropped or tampered with. In addition, strengthening network monitoring and intrusion detection can promptly detect and respond to network attacks, malicious behaviors, and abnormal activities.
- Engaging with policy and regulations in IoV applications: The aforementioned specific areas all require development within policy and regulations. However, the existing specialized policy and regulations governing DT and the IoV warrant further exploration. Developers and institutions can leverage their practical development experiences to offer valuable innovative suggestions and insights for refining policy and regulations. This collaborative effort aims to foster the evolution of policy and regulations, making them more adept at accommodating the rapid advancements in DT and IoV technologies.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Grieves, M.W. Digital Twins: Past, Present, and Future. In The Digital Twin; Springer: Berlin/Heidelberg, Germany, 2023; pp. 97–121. [Google Scholar]
- Allen, B.D. Digital twins and living models at NASA. In Proceedings of the Digital Twin Summit, Virtual, 3–4 November 2021. [Google Scholar]
- Jones, D.; Snider, C.; Nassehi, A.; Yon, J.; Hicks, B. Characterising the Digital Twin: A systematic literature review. CIRP J. Manuf. Sci. Technol. 2020, 29, 36–52. [Google Scholar] [CrossRef]
- Taslimasa, H.; Dadkhah, S.; Neto, E.C.P.; Xiong, P.; Ray, S.; Ghorbani, A.A. Security issues in Internet of Vehicles (IoV): A comprehensive survey. Internet Things 2023, 22, 100809. [Google Scholar] [CrossRef]
- Yang, Z.; Li, L.; Gu, F.; Ling, X. Dependable and reliable cloud-based architectures for vehicular communications: A systematic literature review. Int. J. Commun. Syst. 2023, 36, e5457. [Google Scholar] [CrossRef]
- Brusa, E.; Dagna, A.; Delprete, C.; Gentile, R. An Orchestration Method for Integrated Multi-Disciplinary Simulation in Digital Twin Applications. Aerospace 2023, 10, 601. [Google Scholar] [CrossRef]
- Xue, W.; Wang, Z.; Zheng, R.; Mei, X.; Yang, B.; Nakano, K. Fail-Safe Behavior and Motion Planning Incorporating Shared Control for Potential Driver Intervention. IEEE Trans. Intell. Veh. 2023, 8, 3884–3897. [Google Scholar] [CrossRef]
- Dong, P.; Zhao, J.; Liu, X.; Wu, J.; Xu, X.; Liu, Y.; Wang, S.; Guo, W. Practical application of energy management strategy for hybrid electric vehicles based on intelligent and connected technologies: Development stages, challenges, and future trends. Renew. Sustain. Energy Rev. 2022, 170, 112947. [Google Scholar] [CrossRef]
- Jafari, M.; Kavousi-Fard, A.; Chen, T.; Karimi, M. A review on digital twin technology in smart grid, transportation system and smart city: Challenges and future. IEEE Access 2023, 11, 17471–17484. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, L.; Li, C.; Bai, J.; Lv, H.; Lv, Z. Blockchain-based secure communication of intelligent transportation digital twins system. IEEE Trans. Intell. Transp. Syst. 2022, 23, 22630–22640. [Google Scholar] [CrossRef]
- Ma, J.; Chen, H.; Zhang, Y.; Guo, H.; Ren, Y.; Mo, R.; Liu, L. A digital twin-driven production management system for production workshop. Int. J. Adv. Manuf. Technol. 2020, 110, 1385–1397. [Google Scholar] [CrossRef]
- Mihai, S.; Davis, W.; Hung, D.; Trestian, R.; Karamanoglu, M.; Barn, B.; Prasad, R.; Venkataraman, H.; Nguyen, H. A digital twin framework for predictive maintenance in industry 4.0. In Proceedings of the HPCS 2020: 18th Annual Meeting, Barcelona, Spain, 22–27 March 2021; p. 80y5z. [Google Scholar]
- He, W.; Mao, J.; Song, K.; Li, Z.; Su, Y.; Wang, Y.; Pan, X. Structural performance prediction based on the digital twin model: A battery bracket example. Reliab. Eng. Syst. Saf. 2023, 229, 108874. [Google Scholar] [CrossRef]
- Guo, J.; Bilal, M.; Qiu, Y.; Qian, C.; Xu, X.; Choo, K.K.R. Survey on digital twins for Internet of Vehicles: Fundamentals, challenges, and opportunities. Digit. Commun. Netw. 2022, 2352–8648. [Google Scholar] [CrossRef]
- He, C.; Luan, T.H.; Lu, R.; Su, Z.; Dong, M. Security and privacy in vehicular digital twin networks: Challenges and solutions. IEEE Wirel. Commun. 2022, 30, 154–160. [Google Scholar] [CrossRef]
- Hu, Z.; Lou, S.; Xing, Y.; Wang, X.; Cao, D.; Lv, C. Review and perspectives on driver digital twin and its enabling technologies for intelligent vehicles. IEEE Trans. Intell. Veh. 2022, 7, 417–440. [Google Scholar] [CrossRef]
- Wu, Y.; Zhang, K.; Zhang, Y. Digital twin networks: A survey. IEEE Internet Things J. 2021, 8, 13789–13804. [Google Scholar] [CrossRef]
- Du, H.; Leng, S.; He, J.; Xiong, K.; Zhou, L. Digital twin empowered cooperative trajectory planning of platoon vehicles for collision avoidance with unexpected obstacles. Digit. Commun. Netw. 2023, 2352–8648. [Google Scholar] [CrossRef]
- Bao, L.; Wang, Q.; Jiang, Y. Review of digital twin for intelligent transportation system. In Proceedings of the 2021 International Conference on Information Control, Electrical Engineering and Rail Transit (ICEERT), Lanzhou, China, 30 October–1 November 2021; IEEE: Piscataway, NJ, USA; pp. 309–315. [Google Scholar]
- Tran-Dang, H.; Krommenacker, N.; Charpentier, P.; Kim, D.S. The Internet of Things for logistics: Perspectives, application review, and challenges. IETE Tech. Rev. 2022, 39, 93–121. [Google Scholar] [CrossRef]
- Ali, E.S.; Hasan, M.K.; Hassan, R.; Saeed, R.A.; Hassan, M.B.; Islam, S.; Nafi, N.S.; Bevinakoppa, S. Machine learning technologies for secure vehicular communication in internet of vehicles: Recent advances and applications. Secur. Commun. Netw. 2021, 2021, 8868355. [Google Scholar] [CrossRef]
- Hu, J.; Chen, C.; Cai, L.; Khosravi, M.R.; Pei, Q.; Wan, S. UAV-assisted vehicular edge computing for the 6G internet of vehicles: Architecture, intelligence, and challenges. IEEE Commun. Stand. Mag. 2021, 5, 12–18. [Google Scholar] [CrossRef]
- Benalia, E.; Bitam, S.; Mellouk, A. Data dissemination for Internet of vehicle based on 5G communications: A survey. Trans. Emerg. Telecommun. Technol. 2020, 31, e3881. [Google Scholar] [CrossRef]
- Chhabra, R.; Singh, S.; Khullar, V. Privacy enabled driver behavior analysis in heterogeneous IoV using federated learning. Eng. Appl. Artif. Intell. 2023, 120, 105881. [Google Scholar] [CrossRef]
- Zavvos, E.; Gerding, E.H.; Yazdanpanah, V.; Maple, C.; Stein, S. Privacy and Trust in the Internet of Vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 23, 10126–10141. [Google Scholar] [CrossRef]
- Zhang, Z.; Wen, F.; Sun, Z.; Guo, X.; He, T.; Lee, C. Artificial intelligence-enabled sensing technologies in the 5G/internet of things era: From virtual reality/augmented reality to the digital twin. Adv. Intell. Syst. 2022, 4, 2100228. [Google Scholar] [CrossRef]
- Can, O.; Turkmen, A. Digital Twin and Manufacturing. Digit. Twin Driven Intell. Syst. Emerg. Metaverse 2023, 175–194. [Google Scholar]
- Xiong, M.; Wang, H. Digital twin applications in aviation industry: A review. Int. J. Adv. Manuf. Technol. 2022, 121, 5677–5692. [Google Scholar] [CrossRef]
- VanDerHorn, E.; Mahadevan, S. Digital Twin: Generalization, characterization and implementation. Decis. Support Syst. 2021, 145, 113524. [Google Scholar] [CrossRef]
- Shafto, M.; Conroy, M.; Doyle, R.; Glaessgen, E.; Kemp, C.; LeMoigne, J.; Wang, L. Modeling, simulation, information technology & processing roadmap. Natl. Aeronaut. Space Adm. 2012, 32, 1–38. [Google Scholar]
- Tuegel, E. The airframe digital twin: Some challenges to realization. In Proceedings of the 53rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference 20th AIAA/ASME/AHS Adaptive Structures Conference 14th AIAA, Honolulu, HI, USA, 23–26 April 2012; p. 1812. [Google Scholar]
- Glaessgen, E.; Stargel, D. The digital twin paradigm for future NASA and US Air Force vehicles. In Proceedings of the 53rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference 20th AIAA/ASME/AHS Adaptive Structures Conference 14th AIAA, Honolulu, HI, USA, 23–26 April 2012; p. 1818. [Google Scholar]
- Lee, J.; Lapira, E.; Bagheri, B.; Kao, H.-a. Recent advances and trends in predictive manufacturing systems in big data environment. Manuf. Lett. 2013, 1, 38–41. [Google Scholar] [CrossRef]
- Reifsnider, K.; Majumdar, P. Multiphysics stimulated simulation digital twin methods for fleet management. In Proceedings of the 54th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Boston, MA, USA, 8–11 April 2013; p. 1578. [Google Scholar]
- Majumdar, P.K.; FaisalHaider, M.; Reifsnider, K. Multi-physics response of structural composites and framework for modeling using material geometry. In Proceedings of the 54th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Boston, MA, USA, 8–11 April 2013; p. 1577. [Google Scholar]
- United States Air Force. Global Horizons, Final Report. Homeland Security Digital Library. 2013. Available online: https://defenseinnovationmarketplace.dtic.mil/wp-content/uploads/airforce/GlobalHorizonsFINALREPORT6-26-13.pdf (accessed on 6 February 2024).
- Grieves, M. Digital twin: Manufacturing excellence through virtual factory replication. White Pap. 2014, 1, 1–7. [Google Scholar]
- Rosen, R.; Von Wichert, G.; Lo, G.; Bettenhausen, K.D. About the importance of autonomy and digital twins for the future of manufacturing. IFAC 2015, 48, 567–572. [Google Scholar] [CrossRef]
- Ríos, J.; Hernandez, J.C.; Oliva, M.; Mas, F. Product avatar as digital counterpart of a physical individual product: Literature review and implications in an aircraft. Transdiscipl. Lifecycle Anal. Syst. 2015, 2, 657–666. [Google Scholar]
- Bielefeldt, B.R.; Hochhalter, J.D.; Hartl, D.J. Shape memory alloy sensory particles for damage detection: Experiments, analysis, and design studies. Struct. Health Monit. 2018, 17, 777–814. [Google Scholar] [CrossRef]
- Bazilevs, Y.; Deng, X.; Korobenko, A.; Lanza di Scalea, F.; Todd, M.; Taylor, S. Isogeometric fatigue damage prediction in large-scale composite structures driven by dynamic sensor data. J. Appl. Mech. 2015, 82, 091008. [Google Scholar] [CrossRef]
- Schluse, M.; Rossmann, J. From simulation to experimentable digital twins: Simulation-based development and operation of complex technical systems. In Proceedings of the 2016 IEEE International Symposium on Systems Engineering (ISSE), Edinburgh, UK, 3–5 October 2016; pp. 1–6. [Google Scholar]
- Gabor, T.; Belzner, L.; Kiermeier, M.; Beck, M.T.; Neitz, A. A simulation-based architecture for smart cyber-physical systems. In Proceedings of the 2016 IEEE International Conference on Autonomic Computing (ICAC), Wuerzburg, Germany, 17–22 July 2016; pp. 374–379. [Google Scholar]
- Kraft, E.M. The air force digital thread/digital twin-life cycle integration and use of computational and experimental knowledge. In Proceedings of the 54th AIAA Aerospace Sciences Meeting, San Diego, CA, USA, 4–8 January 2016; p. 0897. [Google Scholar]
- Schroeder, G.N.; Steinmetz, C.; Pereira, C.E.; Espindola, D.B. Digital twin data modeling with automationml and a communication methodology for data exchange. IFAC 2016, 49, 12–17. [Google Scholar] [CrossRef]
- Abramovici, M.; Göbel, J.C.; Savarino, P. Reconfiguration of smart products during their use phase based on virtual product twins. CIRP Ann. 2017, 66, 165–168. [Google Scholar] [CrossRef]
- Stark, R.; Kind, S.; Neumeyer, S. Innovations in digital modelling for next generation manufacturing system design. CIRP Ann. 2017, 66, 169–172. [Google Scholar] [CrossRef]
- Schleich, B.; Anwer, N.; Mathieu, L.; Wartzack, S. Shaping the digital twin for design and production engineering. CIRP Ann. 2017, 66, 141–144. [Google Scholar] [CrossRef]
- Tao, F.; Cheng, J.; Qi, Q.; Zhang, M.; Zhang, H.; Sui, F. Digital twin-driven product design, manufacturing and service with big data. Int. J. Adv. Manuf. Technol. 2018, 94, 3563–3576. [Google Scholar] [CrossRef]
- Autiosalo, J. Platform for industrial internet and digital twin focused education, research, and innovation: Ilmatar the overhead crane. In Proceedings of the 2018 IEEE 4th World Forum on Internet of Things (WF-IoT), Singapore, 5–8 February 2018; pp. 241–244. [Google Scholar]
- Demkovich, N.; Yablochnikov, E.; Abaev, G. Multiscale modeling and simulation for industrial cyber-physical systems. In Proceedings of the 2018 IEEE Industrial Cyber-Physical Systems (ICPS), St. Petersburg, Russia, 15–18 May 2018; pp. 291–296. [Google Scholar]
- Madni, A.M.; Madni, C.C.; Lucero, S.D. Leveraging digital twin technology in model-based systems engineering. Systems 2019, 7, 7. [Google Scholar] [CrossRef]
- Zhou, M.; Yan, J.; Feng, D. Digital twin framework and its application to power grid online analysis. CSEE J. Power Energy Syst. 2019, 5, 391–398. [Google Scholar]
- Cheng, J.; Zhang, H.; Tao, F.; Juang, C.F. DT-II: Digital twin enhanced Industrial Internet reference framework towards smart manufacturing. Robot. Comput.-Integr. Manuf. 2020, 62, 101881. [Google Scholar] [CrossRef]
- Ma, Y.; Borrelli, F.; Hencey, B.; Coffey, B.; Bengea, S.; Haves, P. Model predictive control for the operation of building cooling systems. IEEE Trans. Control. Syst. Technol. 2011, 20, 796–803. [Google Scholar]
- Geng, R.; Li, M.; Hu, Z.; Han, Z.; Zheng, R. Digital Twin in smart manufacturing: Remote control and virtual machining using VR and AR technologies. Struct. Multidiscip. Optim. 2022, 65, 321. [Google Scholar] [CrossRef]
- De Benedictis, A.; Mazzocca, N.; Somma, A.; Strigaro, C. Digital Twins in Healthcare: An architectural proposal and its application in a social distancing case study. IEEE J. Biomed. Health Inform. 2022, 27, 5143–5154. [Google Scholar] [CrossRef] [PubMed]
- Minerva, R.; Lee, G.M.; Crespi, N. Digital twin in the IoT context: A survey on technical features, scenarios, and architectural models. Proc. IEEE 2020, 108, 1785–1824. [Google Scholar] [CrossRef]
- Jiang, F.; Ma, L.; Broyd, T.; Chen, K. Digital twin and its implementations in the civil engineering sector. Autom. Constr. 2021, 130, 103838. [Google Scholar] [CrossRef]
- Dobaj, J.; Riel, A.; Krug, T.; Seidl, M.; Macher, G.; Egretzberger, M. Towards digital twin-enabled DevOps for CPS providing architecture-based service adaptation & verification at runtime. In Proceedings of the 17th Symposium on Software Engineering for Adaptive and Self-Managing Systems, Pittsburgh, PA, USA, 18–23 May 2022; pp. 132–143. [Google Scholar]
- Nazarenko, A.A.; Camarinha-Matos, L.M. The role of digital twins in collaborative cyber-physical systems. In Proceedings of the Technological Innovation for Life Improvement: 11th IFIP WG 5.5/SOCOLNET Advanced Doctoral Conference on Computing, Electrical and Industrial Systems, DoCEIS 2020, Costa de Caparica, Portugal, 1–3 July 2020; Springer: Berlin/Heidelberg, Germany, 2020; pp. 191–205. [Google Scholar]
- Becker, F.; Bibow, P.; Dalibor, M.; Gannouni, A.; Hahn, V.; Hopmann, C.; Jarke, M.; Koren, I.; Kröger, M.; Lipp, J.; et al. A conceptual model for digital shadows in industry and its application. In Proceedings of the Conceptual Modeling: 40th International Conference, ER 2021, Virtual Event, 18–21 October 2021; Springer: Berlin/Heidelberg, Germany, 2021; pp. 271–281. [Google Scholar]
- Yang, W.; Zheng, Y.; Li, S. Application status and prospect of digital twin for on-orbit spacecraft. IEEE Access 2021, 9, 106489–106500. [Google Scholar] [CrossRef]
- Jin, J.; Hu, J.; Li, C.; Shi, Z.; Lei, P.; Tian, W. A Digital Twin system of reconfigurable tooling for monitoring and evaluating in aerospace assembly. J. Manuf. Syst. 2023, 68, 56–71. [Google Scholar] [CrossRef]
- Xu, Z.; Gao, T.; Li, Z.; Bi, Q.; Liu, X.; Tian, K. Digital Twin Modeling Method for Hierarchical Stiffened Plate Based on Transfer Learning. Aerospace 2023, 10, 66. [Google Scholar] [CrossRef]
- Moztarzadeh, O.; Jamshidi, M.; Sargolzaei, S.; Jamshidi, A.; Baghalipour, N.; Malekzadeh Moghani, M.; Hauer, L. Metaverse and Healthcare: Machine Learning-Enabled Digital Twins of Cancer. Bioengineering 2023, 10, 455. [Google Scholar] [CrossRef] [PubMed]
- Mohamed, N.; Al-Jaroodi, J.; Jawhar, I.; Kesserwan, N. Leveraging Digital Twins for Healthcare Systems Engineering. IEEE Access 2023, 11, 69841–69853. [Google Scholar] [CrossRef]
- Lv, Z.; Guo, J.; Lv, H. Deep Learning-Empowered Clinical Big Data Analytics in Healthcare Digital Twins. IEEE/ACM Trans. Comput. Biol. Bioinform. 2023, 1–11. [Google Scholar] [CrossRef]
- Alves, R.G.; Maia, R.F.; Lima, F. Development of a Digital Twin for smart farming: Irrigation management system for water saving. J. Clean. Prod. 2023, 388, 135920. [Google Scholar] [CrossRef]
- Fatima, K.; Hussain, S.; Khan, S.A.; Khan, M.A.; Saleem, S.R.; Kanwal, S. Digital Twin Greenhouse Technologies for Commercial Farmers. Environ. Sci. Proc. 2023, 23, 33. [Google Scholar] [CrossRef]
- Chen, K.; Zhao, B.; Zhou, H.; Zhou, L.; Niu, K.; Jin, X.; Li, R.; Yuan, Y.; Zheng, Y. Digital Twins in Plant Factory: A Five-Dimensional Modeling Method for Plant Factory Transplanter Digital Twins. Agriculture 2023, 13, 1336. [Google Scholar] [CrossRef]
- Chao, Z.; Guanghui, Z.; Jiacheng, X.; Tianyu, Q.; Yaguang, Z. Multi-dimensional and multi-scale modeling and edge-cloud collaborative configuration method for digital twin manufacturing cell. Comput. Integr. Manuf. Syst. 2023, 29, 355. [Google Scholar]
- Xie, J.; Wan, J. Digital Twin Four-Dimension Fusion Modeling Method Design and Application to the Discrete Manufacturing Line. Big Data Cogn. Comput. 2023, 7, 89. [Google Scholar] [CrossRef]
- Nica, E.; Popescu, G.H.; Poliak, M.; Kliestik, T.; Sabie, O.M. Digital Twin Simulation Tools, Spatial Cognition Algorithms, and Multi-Sensor Fusion Technology in Sustainable Urban Governance Networks. Mathematics 2023, 11, 1981. [Google Scholar] [CrossRef]
- Wang, W.; He, F.; Li, Y.; Tang, S.; Li, X.; Xia, J.; Lv, Z. Data information processing of traffic digital twins in smart cities using edge intelligent federation learning. Inf. Process. Manag. 2023, 60, 103171. [Google Scholar] [CrossRef]
- Kuru, K. MetaOmniCity: Towards immersive urban metaverse cyberspaces using smart city digital twins. IEEE Access 2023, 43844–43868. [Google Scholar] [CrossRef]
- Kušić, K.; Schumann, R.; Ivanjko, E. A digital twin in transportation: Real-time synergy of traffic data streams and simulation for virtualizing motorway dynamics. Adv. Eng. Inform. 2023, 55, 101858. [Google Scholar] [CrossRef]
- Nie, L.; Wang, X.; Zhao, Q.; Shang, Z.; Feng, L.; Li, G. Digital Twin for Transportation Big Data: A Reinforcement Learning-Based Network Traffic Prediction Approach. IEEE Trans. Intell. Transp. Syst. 2023, 25, 896–906. [Google Scholar] [CrossRef]
- Cao, C.; Liu, J.; Liu, Y.; Wang, H.; Liu, M. Digital twin-driven robust bi-level optimisation model for COVID-19 medical waste location-transport under circular economy. Comput. Ind. Eng. 2023, 186, 109107. [Google Scholar] [CrossRef]
- Wu, Y.; Cao, H.; Yang, G.; Lu, T.; Wan, S. Digital twin of intelligent small surface defect detection with cyber-manufacturing systems. ACM Trans. Internet Technol. 2022, 23, 1533–5399. [Google Scholar] [CrossRef]
- Qiu, S.; Zhao, H.; Jiang, N.; Wang, Z.; Liu, L.; An, Y.; Zhao, H.; Miao, X.; Liu, R.; Fortino, G. Multi-sensor information fusion based on machine learning for real applications in human activity recognition: State-of-the-art and research challenges. Inf. Fusion 2022, 80, 241–265. [Google Scholar] [CrossRef]
- Wang, X.; Wang, Y.; Tao, F.; Liu, A. New paradigm of data-driven smart customisation through digital twin. J. Manuf. Syst. 2021, 58, 270–280. [Google Scholar] [CrossRef]
- Mohindru, G.; Mondal, K.; Banka, H. Internet of Things and data analytics: A current review. Wiley Interdiscip. Rev. Data Min. Knowl. Discov. 2020, 10, e1341. [Google Scholar] [CrossRef]
- Alraih, S.; Shayea, I.; Behjati, M.; Nordin, R.; Abdullah, N.F.; Abu-Samah, A.; Nandi, D. Revolution or evolution? Technical requirements and considerations towards 6G mobile communications. Sensors 2022, 22, 762. [Google Scholar] [CrossRef] [PubMed]
- Yang, P.; Xiong, N.; Ren, J. Data security and privacy protection for cloud storage: A survey. IEEE Access 2020, 8, 131723–131740. [Google Scholar] [CrossRef]
- O’Connell, E.; O’Brien, W.; Bhattacharya, M.; Moore, D.; Penica, M. Digital Twins: Enabling Interoperability in Smart Manufacturing Networks. Proc. Telecom 2023, 4, 265–278. [Google Scholar] [CrossRef]
- Zhang, Y.; Cai, W. The Key Technology of Wireless Sensor Network and Its Application in the Internet of Things. J. Sensors 2022, 2022, 1817781. [Google Scholar] [CrossRef]
- Proos, D.P.; Carlsson, N. Performance comparison of messaging protocols and serialization formats for digital twins in IoV. In Proceedings of the 2020 IFIP Networking Conference (Networking), Paris, France, 22–26 June 2020; pp. 10–18. [Google Scholar]
- Lian, B.; Zhu, Y.; Branchaud, D.; Wang, Y.; Bales, C.; Bednarz, T.; Waite, T.D. Application of digital twins for remote operation of membrane capacitive deionization (mCDI) systems. Desalination 2022, 525, 115482. [Google Scholar] [CrossRef]
- Autiosalo, J.; Ala-Laurinaho, R.; Mattila, J.; Valtonen, M.; Peltoranta, V.; Tammi, K. Towards integrated digital twins for industrial products: Case study on an overhead crane. Appl. Sci. 2021, 11, 683. [Google Scholar] [CrossRef]
- Cavalieri, S.; Gambadoro, S. Proposal of Mapping Digital Twins Definition Language to Open Platform Communications Unified Architecture. Sensors 2023, 23, 2349. [Google Scholar] [CrossRef] [PubMed]
- Zheng, X.; Lu, J.; Kiritsis, D. The emergence of cognitive digital twin: Vision, challenges and opportunities. Int. J. Prod. Res. 2022, 60, 7610–7632. [Google Scholar] [CrossRef]
- Yan, J.; Liu, Z.; Zhang, C.; Zhang, T.; Zhang, Y.; Yang, C. Research on flexible job shop scheduling under finite transportation conditions for digital twin workshop. Robot. Comput.-Integr. Manuf. 2021, 72, 102198. [Google Scholar] [CrossRef]
- D’Amico, R.D.; Erkoyuncu, J.A.; Addepalli, S.; Penver, S. Cognitive digital twin: An approach to improve the maintenance management. CIRP J. Manuf. Sci. Technol. 2022, 38, 613–630. [Google Scholar] [CrossRef]
- Lohman, W.; Cornelissen, H.; Borst, J.; Klerkx, R.; Araghi, Y.; Walraven, E. Building digital twins of cities using the Inter Model Broker framework. Future Gener. Comput. Syst. 2023, 148, 501–513. [Google Scholar] [CrossRef]
- Fonseca, Í.A.; Gaspar, H.M. Challenges when creating a cohesive digital twin ship: A data modelling perspective. Ship Technol. Res. 2021, 68, 70–83. [Google Scholar] [CrossRef]
- Yan, W.; Liu, Y.; Fu, B.; Ma, W.; Yu, Z.; Li, R. A Novel Message Packing Strategy for Time-Sensitive Networking. In Proceedings of the 2022 IEEE Smartworld, Ubiquitous Intelligence & Computing, Scalable Computing & Communications, Digital Twin, Privacy Computing, Metaverse, Autonomous & Trusted Vehicles (SmartWorld/UIC/ScalCom/DigitalTwin/PriComp/Meta), Haikou, China, 15–18 December 2022; pp. 2069–2075. [Google Scholar]
- Nguyen, T.N.; Zeadally, S.; Vuduthala, A.B. Cyber-physical cloud manufacturing systems with digital twins. IEEE Internet Comput. 2021, 26, 15–21. [Google Scholar] [CrossRef]
- Braunisch, N.; Ristin-Kaufmann, M.; Lehmann, R.; van de Venn, H.W. Generative and Model-driven SDK development for the Industrie 4.0 Digital Twin. In Proceedings of the 2021 26th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Vasteras, Sweden, 7–10 September 2021; pp. 1–4. [Google Scholar]
- Bujari, A.; Calvio, A.; Foschini, L.; Sabbioni, A.; Corradi, A. A digital twin decision support system for the urban facility management process. Sensors 2021, 21, 8460. [Google Scholar] [CrossRef]
- Li, J.; Liu, R.; Lin, H.; Ye, S.; Ye, M.; Wang, X.; Zhu, X. Tensor Network-Encrypted Physical Anti-counterfeiting Passport for Digital Twin Authentication. ACS Appl. Mater. Interfaces 2021, 13, 61536–61543. [Google Scholar] [CrossRef]
- Mashaly, M. Connecting the twins: A review on digital twin technology & its networking requirements. Proc. Comput. Sci. 2021, 184, 299–305. [Google Scholar]
- Li, T.; Wang, H.; He, D.; Yu, J. Synchronized provable data possession based on blockchain for digital twin. IEEE Trans. Inf. Forensics Secur. 2022, 17, 472–485. [Google Scholar] [CrossRef]
- Alcaraz, C.; Lopez, J. Digital twin: A comprehensive survey of security threats. IEEE Commun. Surv. Tutorials 2022, 24, 1475–1503. [Google Scholar] [CrossRef]
- Far, S.B.; Rad, A.I. Applying digital twins in metaverse: User interface, security and privacy challenges. J. Metaverse 2022, 2, 8–15. [Google Scholar]
- Chen, C.; Zhao, Z.; Xiao, J.; Tiong, R. A conceptual framework for estimating building embodied carbon based on digital twin technology and life cycle assessment. Sustainability 2021, 13, 13875. [Google Scholar] [CrossRef]
- Mohanty, S.; Elmer, T.W.; Bakhtiari, S.; Vilim, R.B. A Review of SQL vs NoSQL Database for Nuclear Reactor Digital Twin Applications: With Example MongoDB Based NoSQL Database for Digital Twin Model of a Pressurized-Water-Reactor Steam-Generator. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition. American Society of Mechanical Engineers, Virtual, 1–5 November 2021; Volume 85697, p. V013T14A003. [Google Scholar]
- Pérez Porras, D.; Muñoz Ariza, P.; Vallecillo-Moreno, A.J.; Troya-Castilla, J. Key-Value vs. Graph-Based Data Lakes For Realizing Digital Twin Systems. 2022. Available online: https://ceur-ws.org/Vol-3250/messpaper2.pdf (accessed on 6 February 2024).
- Sharma, A.; Kosasih, E.; Zhang, J.; Brintrup, A.; Calinescu, A. Digital twins: State of the art theory and practice, challenges, and open research questions. J. Ind. Inf. Integr. 2022, 30, 100383. [Google Scholar] [CrossRef]
- Knebel, F.P.; Trevisan, R.; do Nascimento, G.S.; Abel, M.; Wickboldt, J.A. A study on cloud and edge computing for the implementation of digital twins in the Oil & Gas industries. Comput. Ind. Eng. 2023, 182, 109363. [Google Scholar]
- Liu, S.; Lu, Y.; Li, J.; Shen, X.; Sun, X.; Bao, J. A blockchain-based interactive approach between digital twin-based manufacturing systems. Comput. Ind. Eng. 2023, 175, 108827. [Google Scholar] [CrossRef]
- Liu, X.; Jiang, D.; Tao, B.; Xiang, F.; Jiang, G.; Sun, Y.; Kong, J.; Li, G. A systematic review of digital twin about physical entities, virtual models, twin data, and applications. Adv. Eng. Inform. 2023, 55, 101876. [Google Scholar] [CrossRef]
- Hodavand, F.; Ramaji, I.J.; Sadeghi, N. Digital Twin for Fault Detection and Diagnosis of Building Operations: A Systematic Review. Buildings 2023, 13, 1426. [Google Scholar] [CrossRef]
- Lv, Z.; Chen, D.; Cao, B.; Song, H.; Lv, H. Secure deep learning in defense in deep-learning-as-a-service computing systems in digital twins. IEEE Trans. Comput. 2023, 73, 656–668. [Google Scholar] [CrossRef]
- Shi, J.; Dourthe, L.; Li, D.; Deng, L.; Louback, L.; Song, F.; Abolins, N.; Verano, F.; Zhang, P.; Groover, J.; et al. Real-Time Underreamer Vibration Predicting, Monitoring, and Decision-Making Using Hybrid Modeling and a Process Digital Twin. SPE Drill. Complet. 2023, 38, 201–219. [Google Scholar] [CrossRef]
- Ruhe, S.; Schaefer, K.; Branz, S.; Nicolai, S.; Bretschneider, P.; Westermann, D. Design and Implementation of a Hierarchical Digital Twin for Power Systems Using Real-Time Simulation. Electronics 2023, 12, 2747. [Google Scholar] [CrossRef]
- Tu, X.; Autiosalo, J.; Ala-Laurinaho, R.; Yang, C.; Salminen, P.; Tammi, K. TwinXR: Method for using digital twin descriptions in industrial eXtended reality applications. Front. Virtual Real. 2023, 4, 1019080. [Google Scholar] [CrossRef]
- Attaran, M.; Celik, B.G. Digital Twin: Benefits, use cases, challenges, and opportunities. Decis. Anal. J. 2023, 6, 100165. [Google Scholar] [CrossRef]
- Bai, L.; Zhang, Y.; Wei, H.; Dong, J.; Tian, W. Digital twin modeling of a solar car based on the hybrid model method with data-driven and mechanistic. Appl. Sci. 2021, 11, 6399. [Google Scholar] [CrossRef]
- Zheng, Y.; Chen, L.; Lu, X.; Sen, Y.; Cheng, H. Digital twin for geometric feature online inspection system of car body-in-white. Int. J. Comput. Integr. Manuf. 2021, 34, 752–763. [Google Scholar] [CrossRef]
- Steinmetz, C.; Schroeder, G.N.; Rodrigues, R.N.; Rettberg, A.; Pereira, C.E. Key-components for digital twin modeling with granularity: Use case car-as-a-service. IEEE Trans. Emerg. Top. Comput. 2021, 10, 23–33. [Google Scholar] [CrossRef]
- Xu, Y.; Sun, Y.; Liu, X.; Zheng, Y. A digital-twin-assisted fault diagnosis using deep transfer learning. IEEE Access 2019, 7, 19990–19999. [Google Scholar] [CrossRef]
- Wang, W.; Wang, J.; Tian, J.; Lu, J.; Xiong, R. Application of digital twin in smart battery management systems. Chin. J. Mech. Eng. 2021, 34, 1–19. [Google Scholar] [CrossRef]
- Ezhilarasu, C.M.; Skaf, Z.; Jennions, I.K. Understanding the role of a digital twin in integrated vehicle health management (IVHM). In Proceedings of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6–9 October 2019; pp. 1484–1491. [Google Scholar]
- Venkatesan, S.; Manickavasagam, K.; Tengenkai, N.; Vijayalakshmi, N. Health monitoring and prognosis of electric vehicle motor using intelligent-digital twin. IET Electr. Power Appl. 2019, 13, 1328–1335. [Google Scholar] [CrossRef]
- Kampczyk, A.; Dybeł, K. The fundamental approach of the digital twin application in railway turnouts with innovative monitoring of weather conditions. Sensors 2021, 21, 5757. [Google Scholar] [CrossRef] [PubMed]
- Lv, Z.; Li, Y.; Feng, H.; Lv, H. Deep learning for security in digital twins of cooperative intelligent transportation systems. IEEE Trans. Intell. Transp. Syst. 2021, 23, 16666–16675. [Google Scholar] [CrossRef]
- Fu, X.; Yuan, Q.; Liu, S.; Li, B.; Qi, Q.; Wang, J. Communication-efficient decision-making of digital twin assisted Internet of vehicles: A hierarchical multi-agent reinforcement learning approach. China Commun. 2023, 20, 55–68. [Google Scholar] [CrossRef]
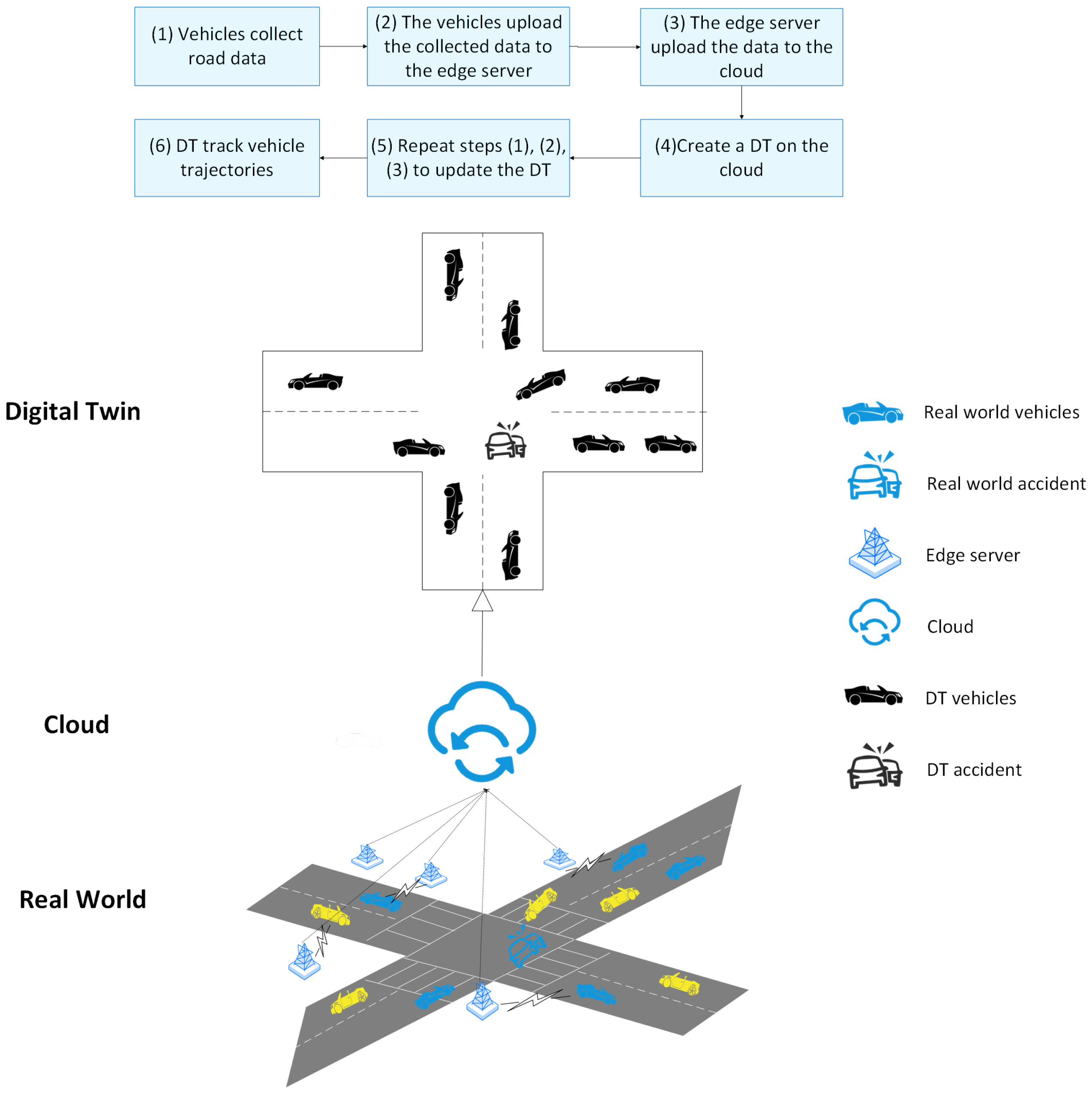
- Ji, Z.; Shen, G.; Wang, J.; Collotta, M.; Liu, Z.; Kong, X. Multi-Vehicle Trajectory Tracking towards Digital Twin Intersections for Internet of Vehicles. Electronics 2023, 12, 275. [Google Scholar] [CrossRef]
- Wang, Z.; Han, K.; Tiwari, P. Digital twin-assisted cooperative driving at non-signalized intersections. IEEE Trans. Intell. Veh. 2021, 7, 198–209. [Google Scholar] [CrossRef]
- Almeaibed, S.; Al-Rubaye, S.; Tsourdos, A.; Avdelidis, N.P. Digital twin analysis to promote safety and security in autonomous vehicles. IEEE Commun. Stand. Mag. 2021, 5, 40–46. [Google Scholar] [CrossRef]
- Hui, Y.; Ma, X.; Su, Z.; Cheng, N.; Yin, Z.; Luan, T.H.; Chen, Y. Collaboration as a service: Digital-twin-enabled collaborative and distributed autonomous driving. IEEE Internet Things J. 2022, 9, 18607–18619. [Google Scholar] [CrossRef]
- Liao, X.; Zhao, X.; Wang, Z.; Zhao, Z.; Han, K.; Gupta, R.; Barth, M.J.; Wu, G. Driver digital twin for online prediction of personalized lane change behavior. IEEE Internet Things J. 2023, 10, 13235–13246. [Google Scholar] [CrossRef]
- Yun, H.; Park, D. Simulation of self-driving system by implementing digital twin with GTA5. In Proceedings of the 2021 International Conference on Electronics, Information, and Communication (ICEIC), Jeju, Republic of Korea, 31 January–3 February 2021; pp. 1–2. [Google Scholar]
- Rassõlkin, A.; Vaimann, T.; Kallaste, A.; Kuts, V. Digital twin for propulsion drive of autonomous electric vehicle. In Proceedings of the 2019 IEEE 60th International Scientific Conference on Power and Electrical Engineering of Riga Technical University (RTUCON), Riga, Latvia, 7–9 October 2019; pp. 1–4. [Google Scholar]
- Feng, H.; Lv, H.; Lv, Z. Resilience towarded Digital Twins to improve the adaptability of transportation systems. Transp. Res. Part Policy Pract. 2023, 173, 103686. [Google Scholar] [CrossRef]
- Hu, C.; Fan, W.; Zeng, E.; Hang, Z.; Wang, F.; Qi, L.; Bhuiyan, M.Z.A. Digital twin-assisted real-time traffic data prediction method for 5G-enabled internet of vehicles. IEEE Trans. Ind. Inform. 2021, 18, 2811–2819. [Google Scholar] [CrossRef]
- Tu, Z.; Qiao, L.; Nowak, R.; Lv, H.; Lv, Z. Digital Twins-Based Automated Pilot for Energy-Efficiency Assessment of Intelligent Transportation Infrastructure. IEEE Trans. Intell. Transp. Syst. 2022, 23, 22320–22330. [Google Scholar] [CrossRef]
- Rudskoy, A.; Ilin, I.; Prokhorov, A. Digital twins in the intelligent transport systems. Transp. Res. Proc. 2021, 54, 927–935. [Google Scholar] [CrossRef]
- Feng, H.; Chen, D.; Lv, Z. Blockchain in digital twins-based vehicle management in VANETs. IEEE Trans. Intell. Transp. Syst. 2022, 23, 19613–19623. [Google Scholar] [CrossRef]
- Dasgupta, S.; Rahman, M.; Lidbe, A.D.; Lu, W.; Jones, S. A transportation digital-twin approach for adaptive traffic control systems. arXiv 2021, arXiv:2109.10863. [Google Scholar]
- Xu, X.; Shen, B.; Ding, S.; Srivastava, G.; Bilal, M.; Khosravi, M.R.; Menon, V.G.; Jan, M.A.; Wang, M. Service offloading with deep Q-network for digital twinning-empowered Internet of Vehicles in edge computing. IEEE Trans. Ind. Inform. 2020, 18, 1414–1423. [Google Scholar] [CrossRef]
- Li, C.; Chen, Q.; Chen, M.; Su, Z.; Ding, Y.; Lan, D.; Taherkordi, A. Blockchain enabled task offloading based on edge cooperation in the digital twin vehicular edge network. J. Cloud Comput. 2023, 12, 120. [Google Scholar] [CrossRef]
- Sun, W.; Wang, P.; Xu, N.; Wang, G.; Zhang, Y. Dynamic digital twin and distributed incentives for resource allocation in aerial-assisted internet of vehicles. IEEE Internet Things J. 2021, 9, 5839–5852. [Google Scholar] [CrossRef]
- Zheng, J.; Luan, T.H.; Zhang, Y.; Li, R.; Hui, Y.; Gao, L.; Dong, M. Data Synchronization in Vehicular Digital Twin Network: A Game Theoretic Approach. IEEE Trans. Wirel. Commun. 2023, 22, 7635–7647. [Google Scholar] [CrossRef]
- Putz, B.; Dietz, M.; Empl, P.; Pernul, G. Ethertwin: Blockchain-based secure digital twin information management. Inf. Process. Manag. 2021, 58, 102425. [Google Scholar] [CrossRef]
- Tan, C.; Li, X.; Gao, L.; Luan, T.H.; Qu, Y.; Xiang, Y.; Lu, R. Digital Twin Enabled Remote Data Sharing for Internet of Vehicles: System and Incentive Design. IEEE Trans. Veh. Technol. 2023, 72, 13474–13489. [Google Scholar] [CrossRef]
- Tan, C.; Li, X.; Luan, T.H.; Gu, B.; Qu, Y.; Gao, L. Digital twin based remote resource sharing in internet of vehicles using consortium blockchain. In Proceedings of the 2021 IEEE 94th Vehicular Technology Conference (VTC2021-Fall), Norman, OK, USA, 27–30 September 2021; pp. 1–6. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Full Name | Abbreviations |
|---|---|
| Digital Twin | DT |
| Internet of Things | IoT |
| Internet of Vehicles | IoV |
| National Aeronautics and Space Administration | NASA |
| Augmented Reality | AR |
| Virtual Reality | VR |
| Cyber Physical Systems | CPS |
| Three-Dimensional | 3D |
| Data Distribution Service | DDS |
| HyperText Transfer Protocol | HTTP |
| JavaScript Object Notation | JSON |
| eXtensible Markup Language | XML |
| Extended Reality | XR |
| Intelligent Transportation System | ITS |
| Car as a Service | CaaS |
| Convolutional Neural Network | CNN |
| Vehicular Ad hoc Networks | VANET |
| Artificial Intelligence | AI |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, J.; Peng, C.; Yoshinaga, T.; Han, G.; Guleng, S.; Wu, C. Digital Twin-Enabled Internet of Vehicles Applications. Electronics 2024, 13, 1263. https://doi.org/10.3390/electronics13071263
Gao J, Peng C, Yoshinaga T, Han G, Guleng S, Wu C. Digital Twin-Enabled Internet of Vehicles Applications. Electronics. 2024; 13(7):1263. https://doi.org/10.3390/electronics13071263
Chicago/Turabian StyleGao, Junting, Chunrong Peng, Tsutomu Yoshinaga, Guorong Han, Siri Guleng, and Celimuge Wu. 2024. "Digital Twin-Enabled Internet of Vehicles Applications" Electronics 13, no. 7: 1263. https://doi.org/10.3390/electronics13071263