
Multisource Sparse Inversion Localization with Long-Distance Mobile Sensors


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Based on the MCS context, this study implements long-distance sparse positioning by constructing and solving a block sparsity model synthesized from time and energy domains. Compared to the aforementioned sparse inversion positioning algorithms, the block sparsity-based positioning algorithm can achieve simultaneous co-frequency multisource positioning within the periphery of the sensor network.
- Within the framework of sparse positioning, this study introduces an adaptive iterative recovery by unilateral detection of branch residuals during the iteration process and provides expressions for false alarm probability and decision thresholds. Compared to traditional compressive sensing algorithms, the UBRD algorithm can adaptively control the iterative process under blind sparsity conditions.
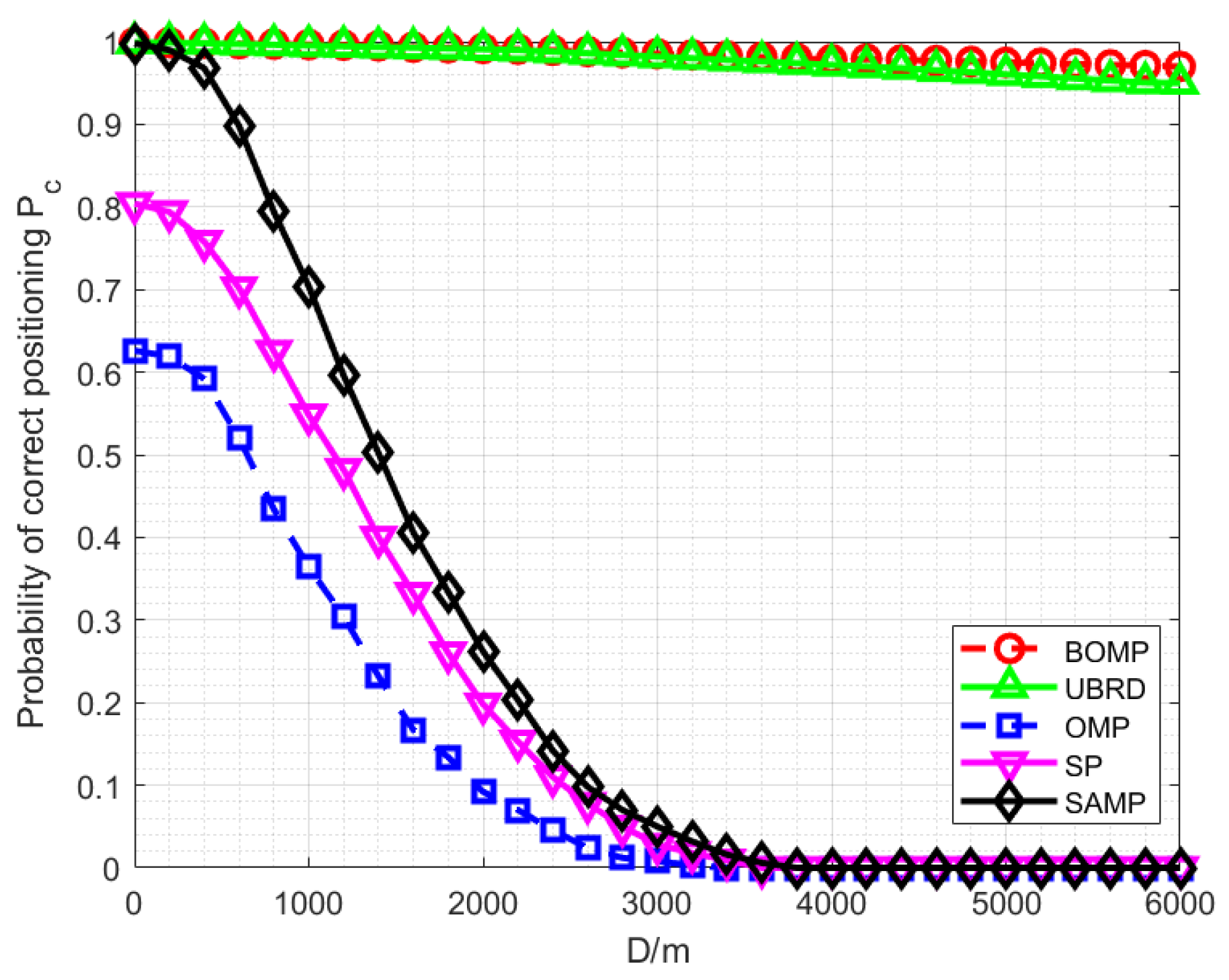
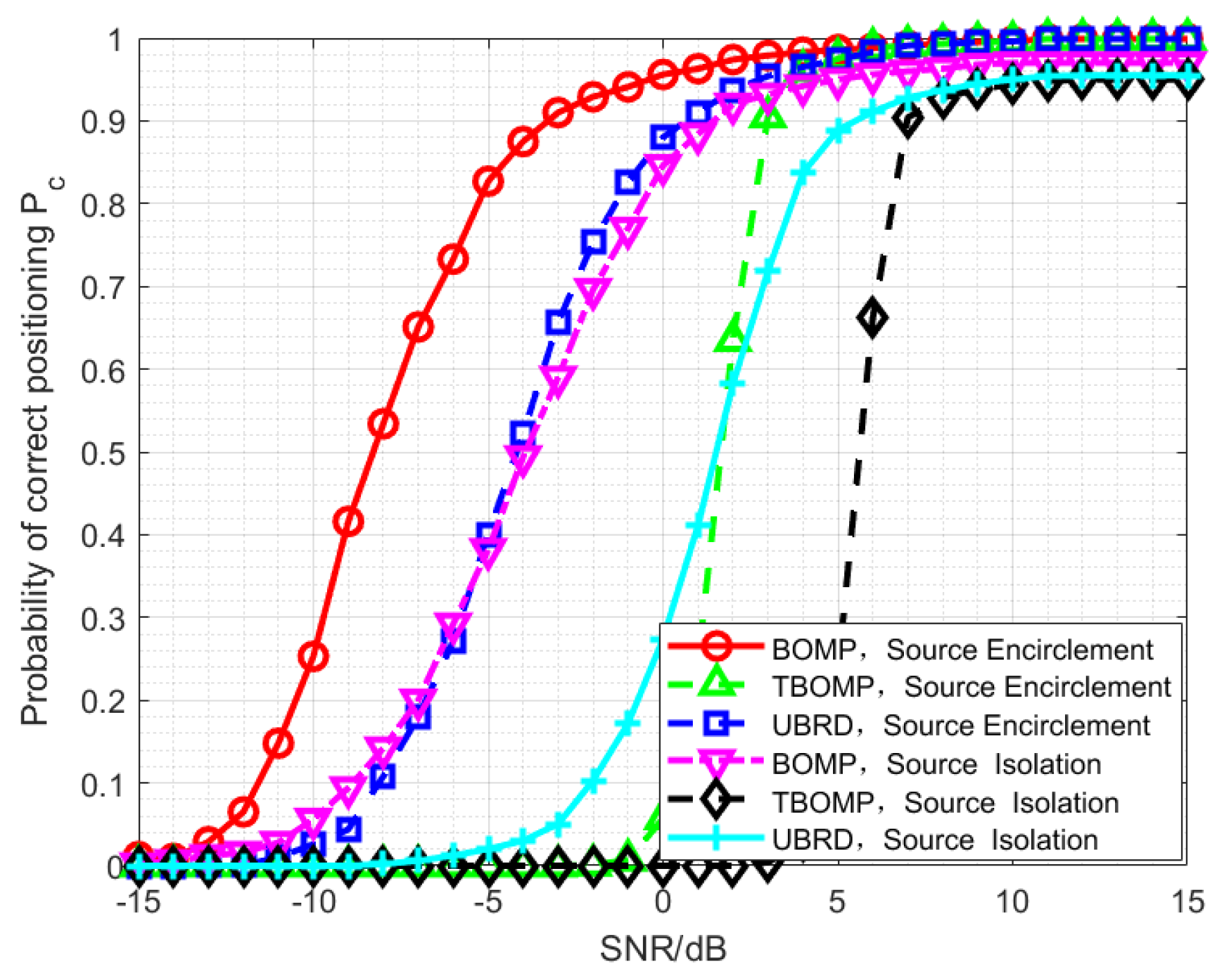
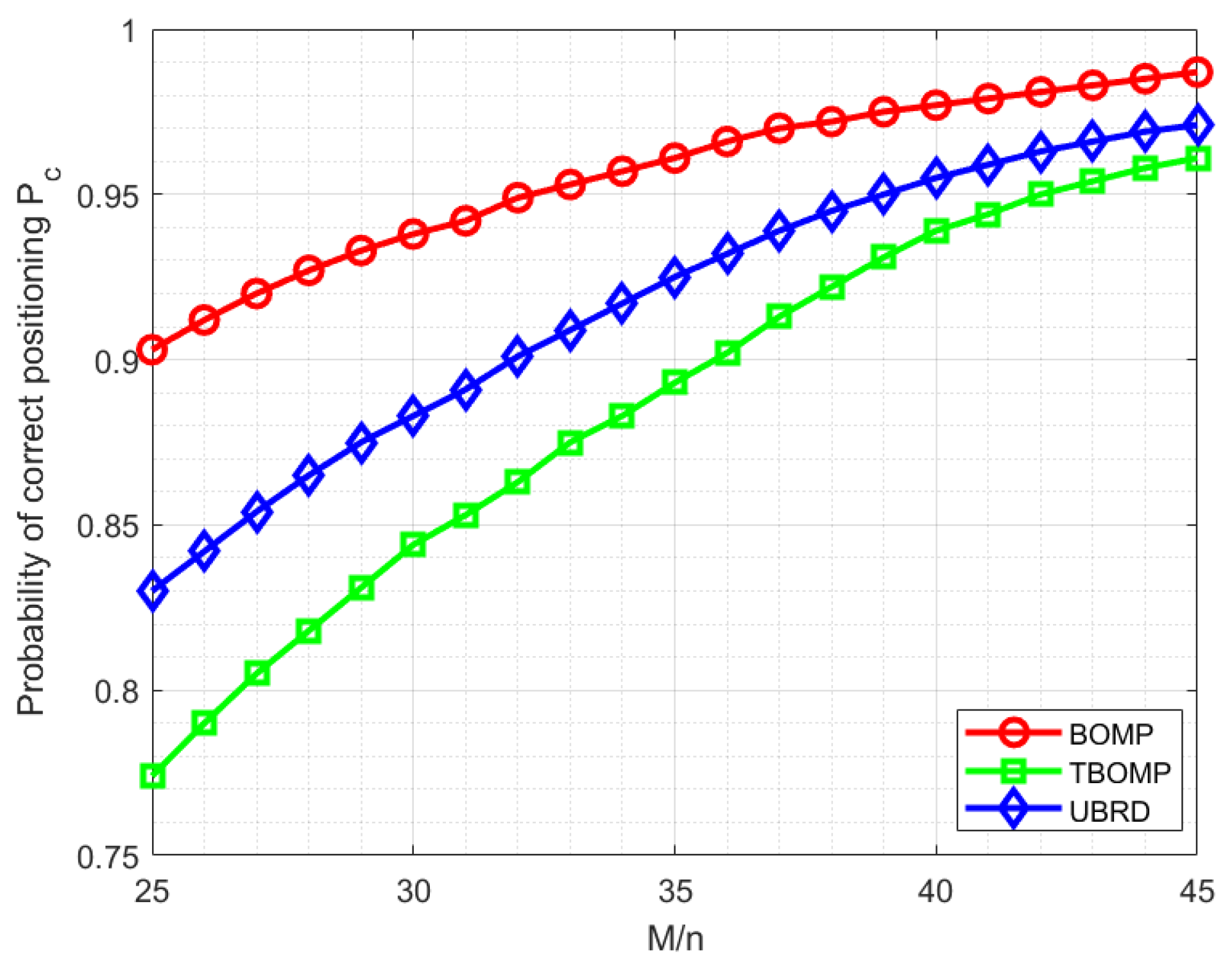
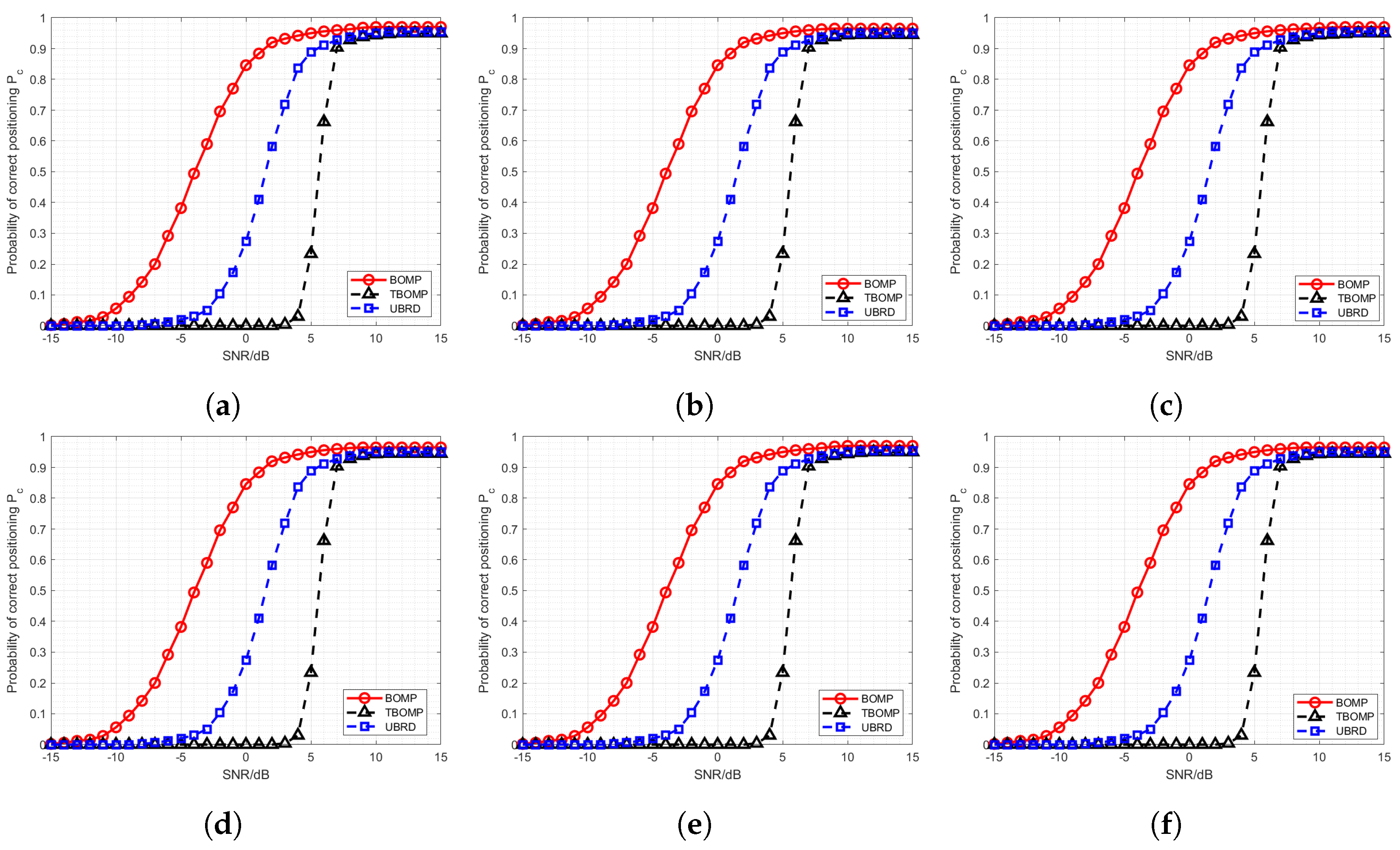
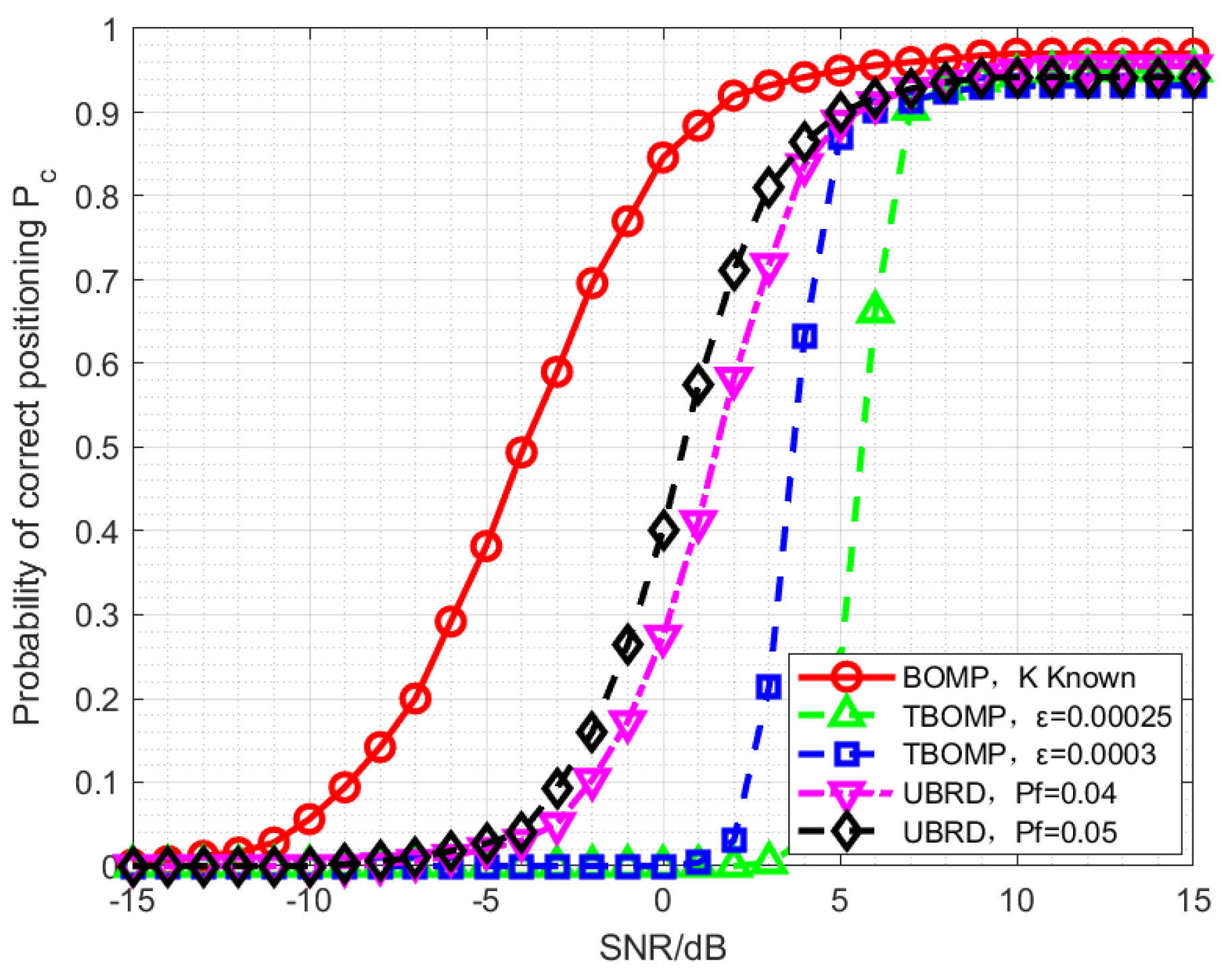
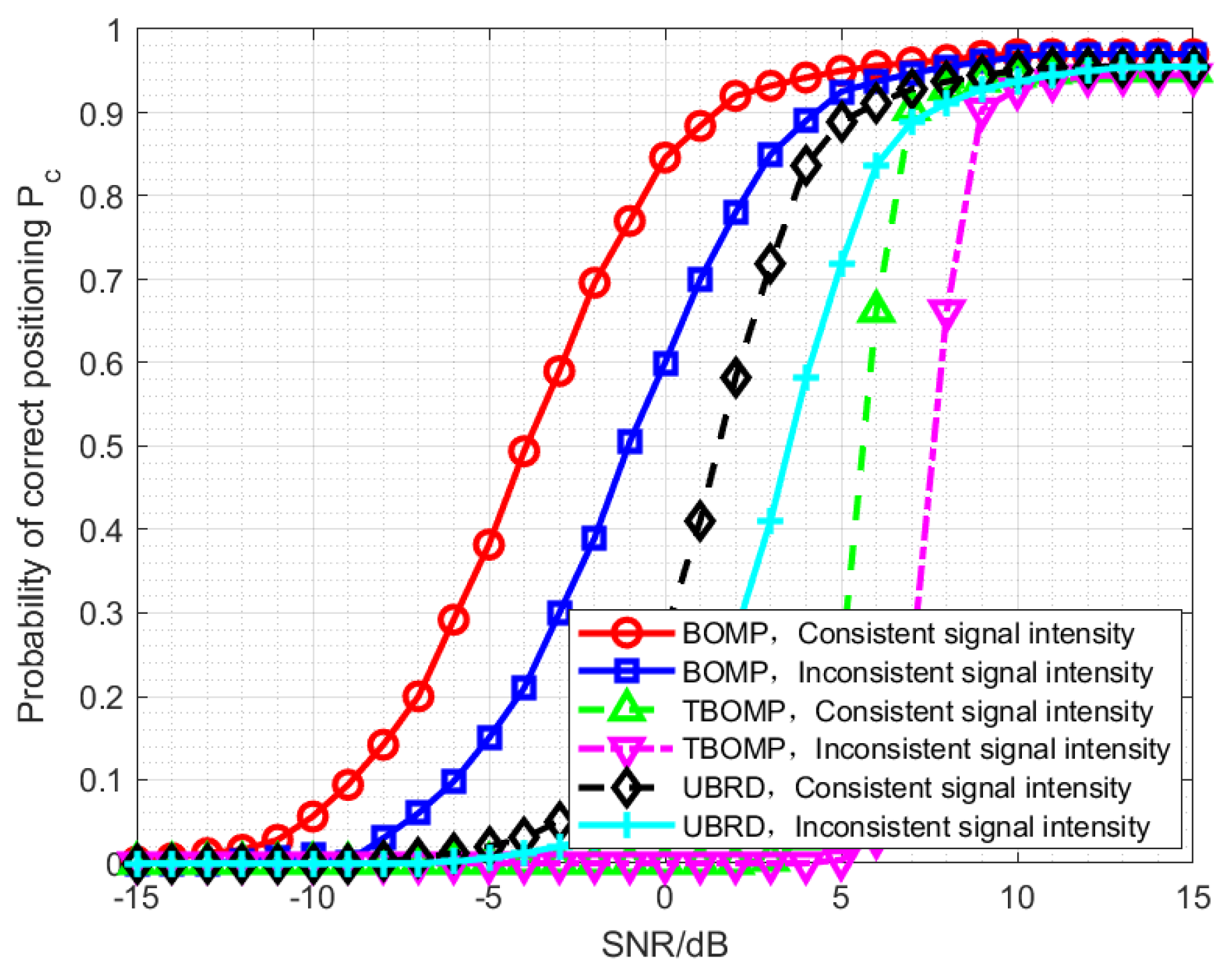
- Simulation results for different algorithms under various scenarios indicate that the block sparsity-based sparse positioning technology can achieve long-distance simultaneous co-frequency multisource positioning and has broader scenario adaptability. Under conditions of unknown sparsity, the UBRD algorithm demonstrates superior performance compared to algorithms that make decisions based on energy thresholds.
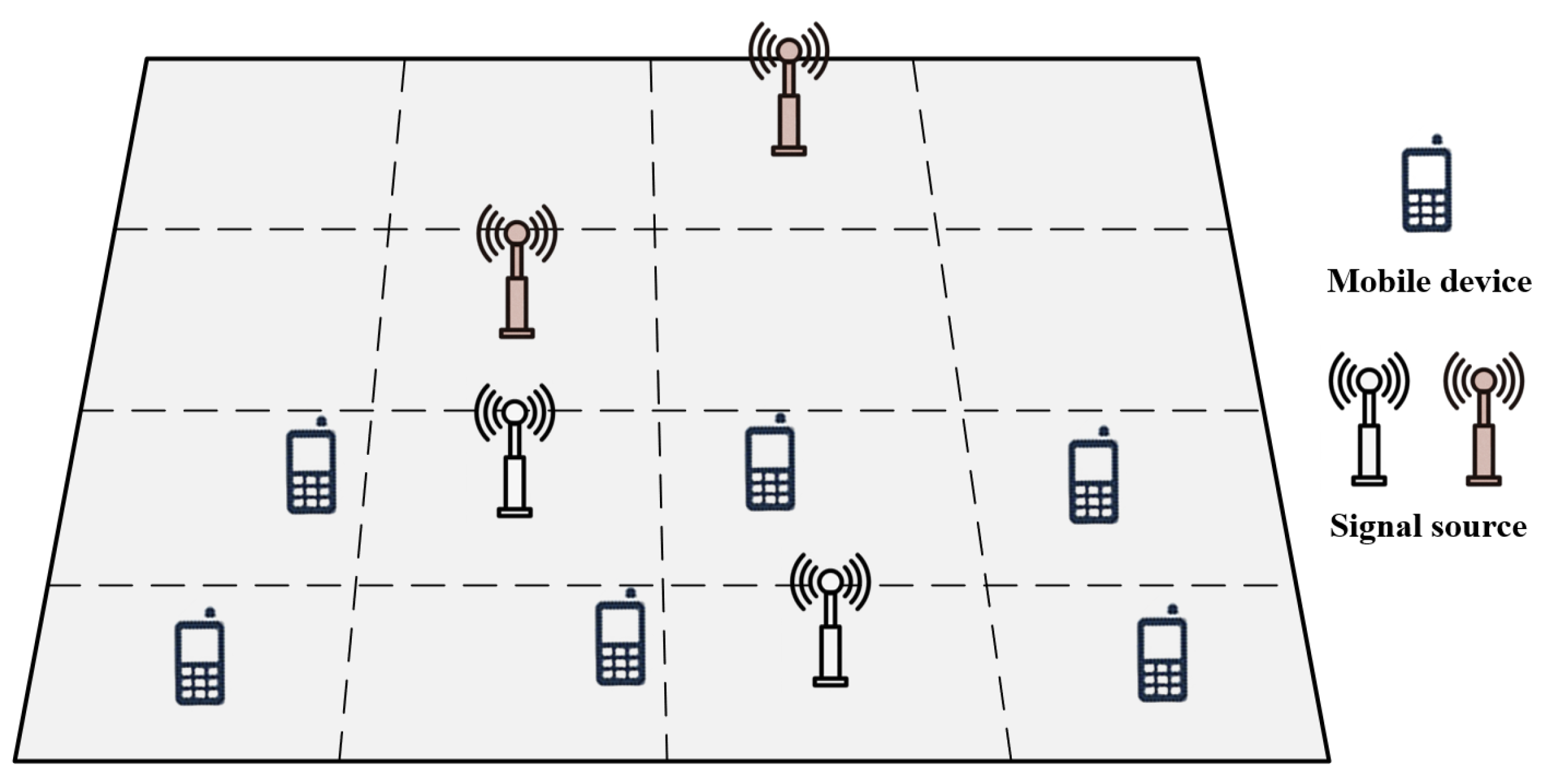
2. MCS Positioning and Problem Description
2.1. MCS Sparse Localization Framework and Issues
- (1)
- Received Signal Vector
- (2)
- Signal Source Sparse Vector
- (3)
- Sensing Matrix
| Algorithm 1 The OMP Algorithm |
|
2.2. The Block Sparse Long-Range Localization Model and Its Associated Issues
- (1)
- The received signal vector
- (2)
- The signal source block sparse vector
- (3)
- Sensing Matrix
| Algorithm 2 The BOMP Algorithm |
|
| Algorithm 3 The TBOMP Algorithm |
|
3. Algorithm Design
3.1. Algorithm Steps
- Most Relevant Block Selection: In the first step, the algorithm calculates the index of the most relevant block by comparing the sensing matrix with the received signal vector.
- Support Set Update: In the second step, the algorithm updates the position support set based on the index of the most relevant block, and consequently updates the sensing matrix.
- Residual Update: The third step involves updating the residual vector using the sensing matrix obtained in the previous step.
- UBRD Module: In the fourth step, the UBRD module adaptively controls the iterative process by adjusting the residual detection threshold based on a predefined false alarm probability.
| Algorithm 4 The UBRD Algorithm |
|
3.2. Threshold Calculation for Decision
4. Performance Simulation and Analysis
4.1. Simulation Scenario Setting
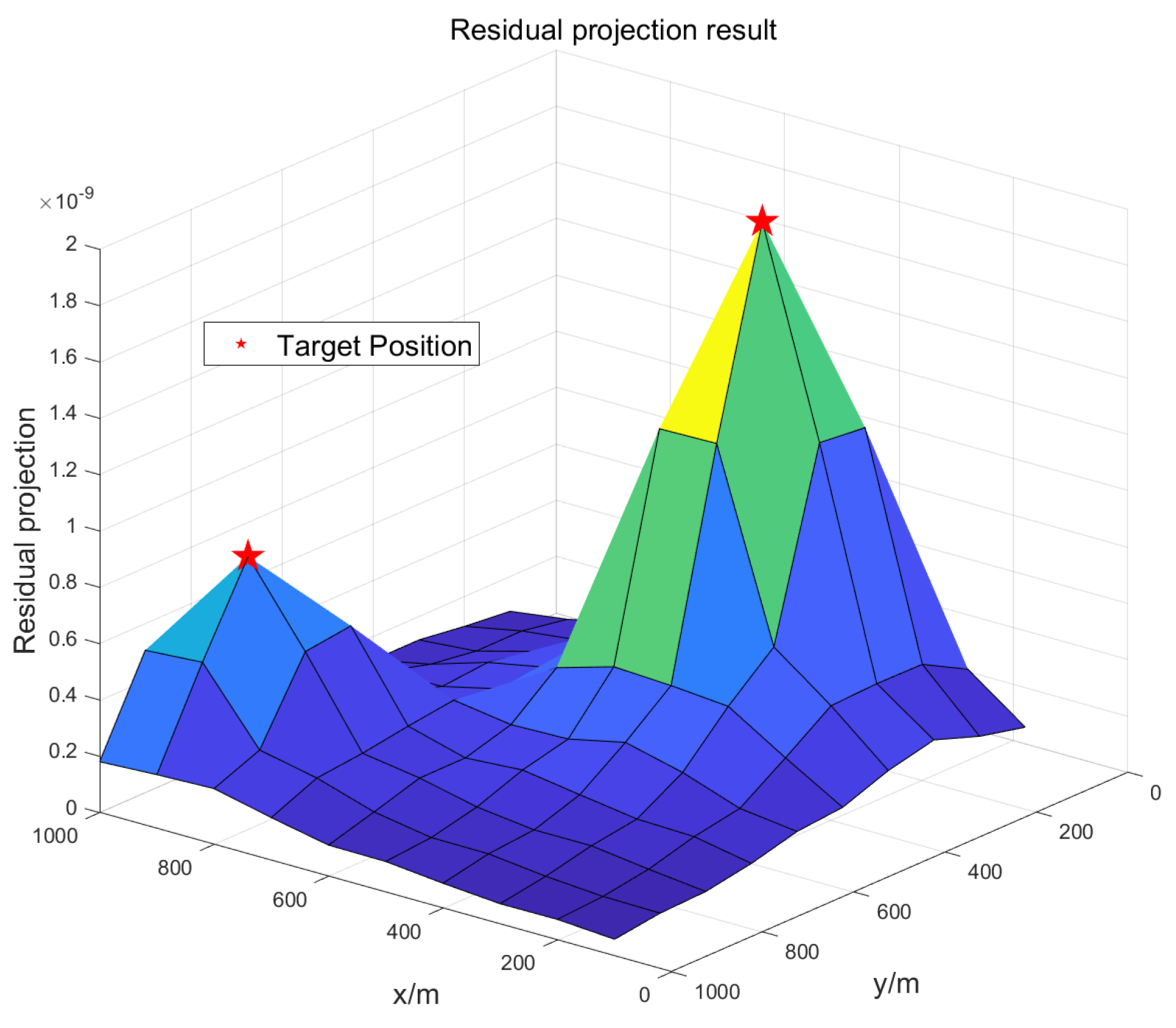
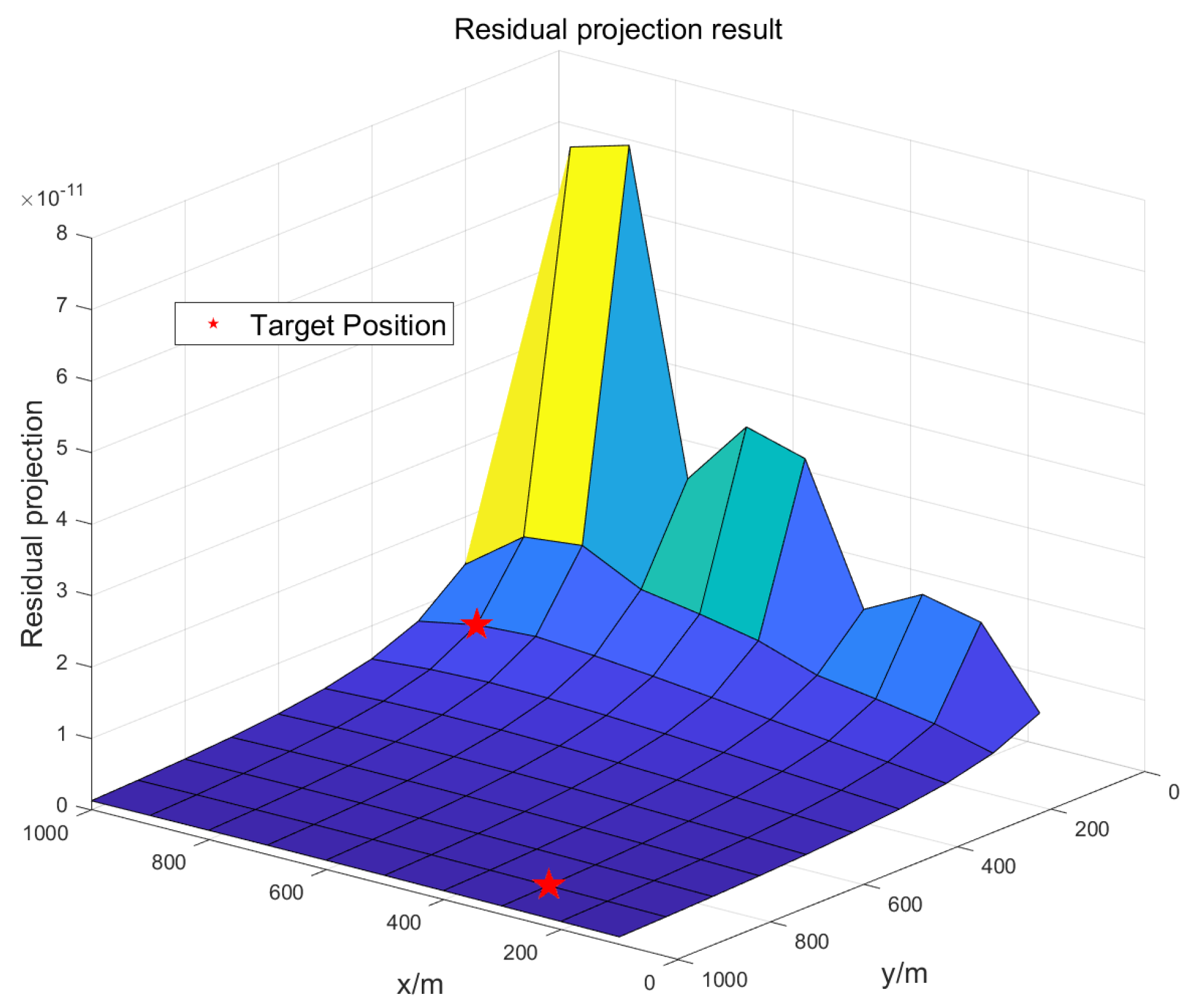
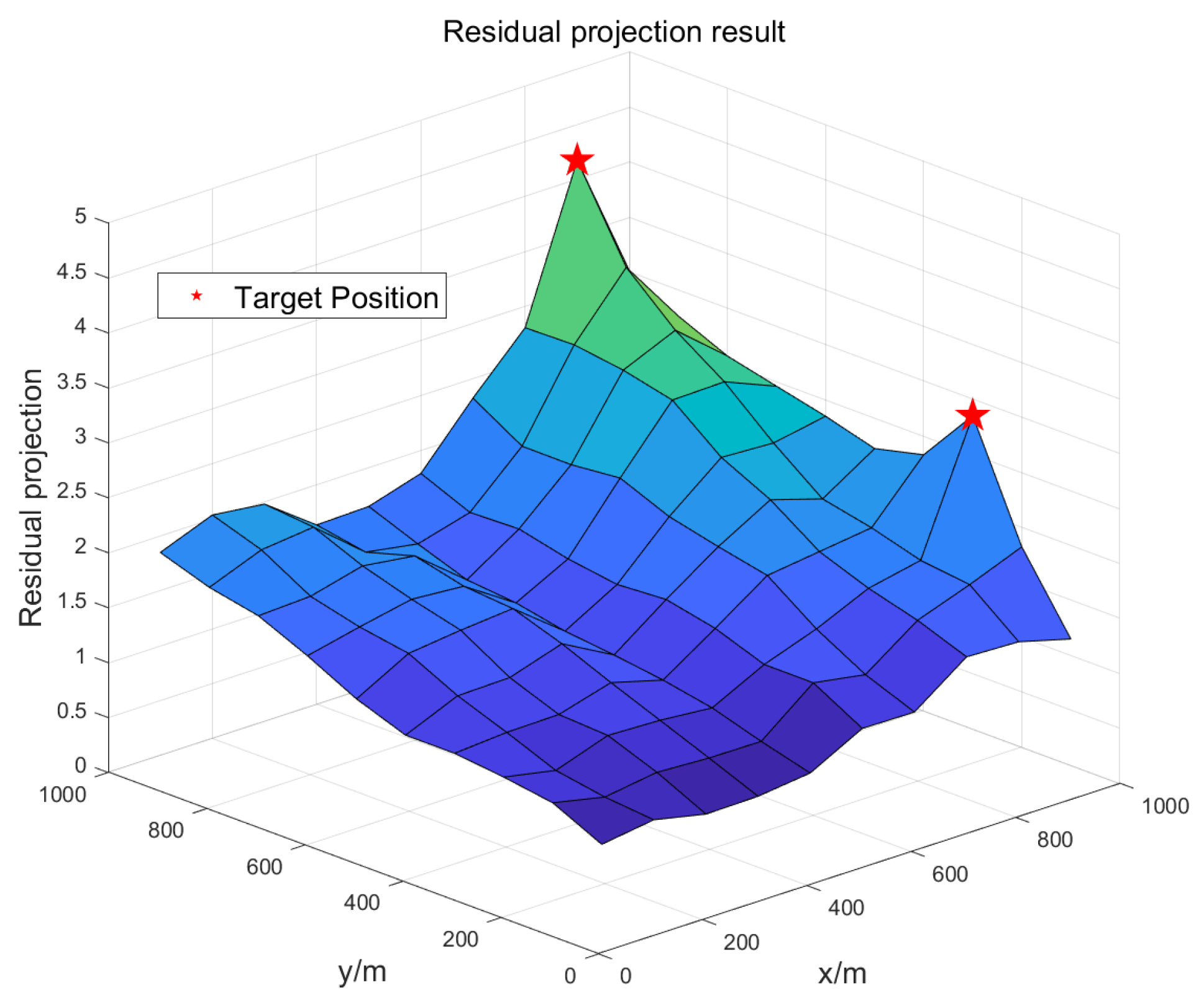
4.2. Simulation Result
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Capponi, A.; Fiandrino, C.; Kantarci, B.; Foschini, L.; Kliazovich, D.; Bouvry, P. A survey on mobile crowdsensing systems: Challenges, solutions, and opportunities. IEEE Commun. Surv. Tutor. 2019, 21, 2419–2465. [Google Scholar] [CrossRef]
- Zhang, C.; Zhu, L.; Xu, C.; Liu, X.; Sharif, K. Reliable and privacy-preserving truth discovery for mobile crowdsensing systems. IEEE Trans. Dependable Secur. Comput. 2019, 3, 1245–1260. [Google Scholar] [CrossRef]
- Zhang, C.; Zhao, M.; Zhu, L.; Wu, T.; Liu, X. Enabling efficient and strong privacy-preserving truth discovery in mobile crowdsensing. IEEE Trans. Dependable Secur. Comput. 2022, 17, 3569–3581. [Google Scholar] [CrossRef]
- Friedlander, B. A passive localization algorithm and its accuracy analysis. IEEE J. Ocean. Eng. 1987, 1, 234–245. [Google Scholar] [CrossRef]
- Zhang, W.; Yang, D.; Wu, W.; Peng, H.; Zhang, N.; Zhang, H.; Shen, X. Optimizing federated learning in distributed industrial IoT: A multi-agent approach. IEEE J. Sel. Areas Commun. 2021, 12, 3688–3703. [Google Scholar] [CrossRef]
- Abualsaud, K.; Elfouly, T.M.; Khattab, T.; Yaacoub, E.; Ismail, L.S.; Ahmed, M.H.; Guizani, M. A survey on mobile crowd-sensing and its applications in the IoT era. IEEE Access 2018, 7, 3855–3881. [Google Scholar] [CrossRef]
- Fawad, M.; Khan, M.Z.; Ullah, K.; Alasmary, H.; Shehzad, D.; Khan, B. Enhancing Localization Efficiency and Accuracy in Wireless Sensor Networks. Sensors 2023, 5, 2796. [Google Scholar] [CrossRef] [PubMed]
- Viani, F.; Rocca, P.; Benedetti, M.; Oliveri, G.; Massa, A. Electromagnetic passive localization and tracking of moving targets in a WSN-infrastructured environment. Inverse Probl. 2010, 7, 074003. [Google Scholar] [CrossRef]
- Guo, W.; Zhu, W.; Yu, Z.; Wang, J.; Guo, B. A survey of task allocation: Contrastive perspectives from wireless sensor networks and mobile crowdsensing. IEEE Access 2019, 7, 78406–78420. [Google Scholar] [CrossRef]
- Amundson, I.; Koutsoukos, X.D. A survey on localization for mobile wireless sensor networks. In International Workshop on Mobile Entity Localization and Tracking in GPS-Less Environments; Springer: Berlin/Heidelberg, Germany, 2009; pp. 235–254. [Google Scholar]
- Niculescu, D.; Nath, B. Ad hoc positioning system (APS). In GLOBECOM’01. IEEE Global Telecommunications Conference (Cat. No. 01CH37270); IEEE: Washington, DC, USA, 2001; Volume 5, pp. 2926–2931. [Google Scholar]
- Patwari, N.; Hero, A.O.; Perkins, M.; Correal, N.S.; O’dea, R.J. Relative location estimation in wireless sensor networks. IEEE Trans. Signal. Proces. 2003, 8, 2137–2148. [Google Scholar] [CrossRef]
- Vossiek, M.; Wiebking, L.; Gulden, P.; Wieghardt, J.; Hoffmann, C.; Heide, P. Wireless local positioning. IEEE Microw. Mag. 2003, 4, 77–86. [Google Scholar] [CrossRef]
- Gui, L.; Val, T.; Wei, A.; Dalce, R. Improvement of range-free localization technology by a novel DV-hop protocol in wireless sensor networks. Ad Hoc Netw. 2015, 24, 55–73. [Google Scholar] [CrossRef]
- Tomic, S.; Beko, M.; Dinis, R. RSS-based localization in wireless sensor networks using convex relaxation: Noncooperative and cooperative schemes. IEEE Trans. Veh. Technol. 2014, 5, 2037–2050. [Google Scholar] [CrossRef]
- Wang, Y.; Ho, K.C. An asymptotically efficient estimator in closed-form for 3-D AOA localization using a sensor network. IEEE Trans. Wirel. Commun. 2015, 12, 6524–6535. [Google Scholar] [CrossRef]
- Pak, J.M.; Ahn, C.K.; Shi, P.; Shmaliy, Y.S.; Lim, M.T. Distributed hybrid particle/FIR filtering for mitigating NLOS effects in TOA-based localization using wireless sensor networks. IEEE Trans. Ind. Electron. 2016, 6, 5182–5191. [Google Scholar]
- Gholami, M.R.; Gezici, S.; Strom, E.G. TDOA based positioning in the presence of unknown clock skew. IEEE Trans. Commun. 2013, 6, 2522–2534. [Google Scholar] [CrossRef]
- Dai, L.; Wang, B.; Yuan, Y.; Han, S.; Chih-Lin, I.; Wang, Z. Non-orthogonal multiple access for 5G: Solutions, challenges, opportunities, and future research trends. IEEE Commun. Mag. 2015, 9, 74–81. [Google Scholar] [CrossRef]
- Moreno-Salinas, D.; Pascoal, A.M.; Aranda, J. Optimal sensor placement for multiple target positioning with range-only measurements in two-dimensional scenarios. Sensors 2013, 8, 10674–10710. [Google Scholar] [CrossRef] [PubMed]
- Xu, S.; Wu, L.; Doğançay, K.; Alaee-Kerahroodi, M. A hybrid approach to optimal TOA-sensor placement with fixed shared sensors for simultaneous multi-target localization. IEEE Trans. Signal Process. 2022, 70, 1197–1212. [Google Scholar] [CrossRef]
- Candès, E.J.; Wakin, M.B. An introduction to compressive sampling. IEEE Signal. Process. Mag. 2008, 2, 21–30. [Google Scholar] [CrossRef]
- Cevher, V.; Duarte, M.F.; Baraniuk, R.G. Distributed target localization via spatial sparsity. In Proceedings of the 2008 16th European Signal Processing Conference, Lausanne, Switzerland, 25–29 August 2008; IEEE: Washington, DC, USA, 2008; pp. 1–5. [Google Scholar]
- Feng, C.; Valaee, S.; Tan, Z. Multiple target localization using compressive sensing. In Proceedings of the GLOBECOM 2009–2009 IEEE Global Telecommunications Conference, Honolulu, HI, USA, 4 March 2010; IEEE: Washington, DC, USA, 2009; pp. 1–6. [Google Scholar]
- Zhang, B.; Cheng, X.; Zhang, N.; Cui, Y.; Li, Y.; Liang, Q. Sparse target counting and localization in sensor networks based on compressive sensing. In Proceedings of the 2011 Proceedings IEEE INFOCOM, Shanghai, China, 10–15 April 2011; IEEE: Washington, DC, USA, 2011; pp. 2255–2263. [Google Scholar]
- Feng, C.; Au, W.S.A.; Valaee, S.; Tan, Z. Received-signal-strength-based indoor positioning using compressive sensing. IEEE Trans. Mob. Comput. 2011, 12, 1983–1993. [Google Scholar] [CrossRef]
- Qi, P.; Li, Z.; Li, H.; Xiong, T. Blind sub-Nyquist spectrum sensing with modulated wideband converter. IEEE Trans. Veh. Technol. 2018, 5, 4278–4288. [Google Scholar] [CrossRef]
- Baraniuk, R.G.; Cevher, V.; Duarte, M.F.; Hegde, C. Model-based compressive sensing. IEEE Trans. Inf. Theory 2010, 4, 1982–2001. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, W.; Cui, Y.; Lu, L.; Lin, J. On recovery of block sparse signals via block compressive sampling matching pursuit. IEEE Access 2019, 7, 175554–175563. [Google Scholar] [CrossRef]
- Hinkley, D.V. On the ratio of two correlated normal random variables. Biometrika 1969, 3, 635–639. [Google Scholar] [CrossRef]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, J.; Qi, P.; Li, C.; Zhu, P.; Li, Z. Multisource Sparse Inversion Localization with Long-Distance Mobile Sensors. Electronics 2024, 13, 1024. https://doi.org/10.3390/electronics13061024
Ren J, Qi P, Li C, Zhu P, Li Z. Multisource Sparse Inversion Localization with Long-Distance Mobile Sensors. Electronics. 2024; 13(6):1024. https://doi.org/10.3390/electronics13061024
Chicago/Turabian StyleRen, Jinyang, Peihan Qi, Chenxi Li, Panpan Zhu, and Zan Li. 2024. "Multisource Sparse Inversion Localization with Long-Distance Mobile Sensors" Electronics 13, no. 6: 1024. https://doi.org/10.3390/electronics13061024