

Active Power Allocation Method of Doubly Fed Induction Generators Based on Rotor Speed
Abstract
:1. Introduction
2. Analysis of Wind Turbine Inertia Support Capacity
2.1. Subsection
2.2. Analysis of WT Inertia Support Capacity
- (1)
- ΔPt > PWmax, where PWmax is the maximum power output of the wind farm at the current wind speed. Case 1 indicates that at this time, the wind farm cannot provide inertia-supporting power for the system and cannot satisfy the minimum inertia demand of the system, which requires energy storage to assist in providing active power.
- (2)
- ΔPt ≤ PWmax, case 2, indicates that the wind farm can meet the power of inertial support required by the system at this time, and this paper further proposes an allocation method by considering the variability between the rotational speeds of the units.
3. WTGs Active Power Allocation Method
3.1. Active Power Allocation Method to Improve Inertia Support Capacity
3.2. MPPT Active Output Power under the Influence of Environmental Factors
- (1)
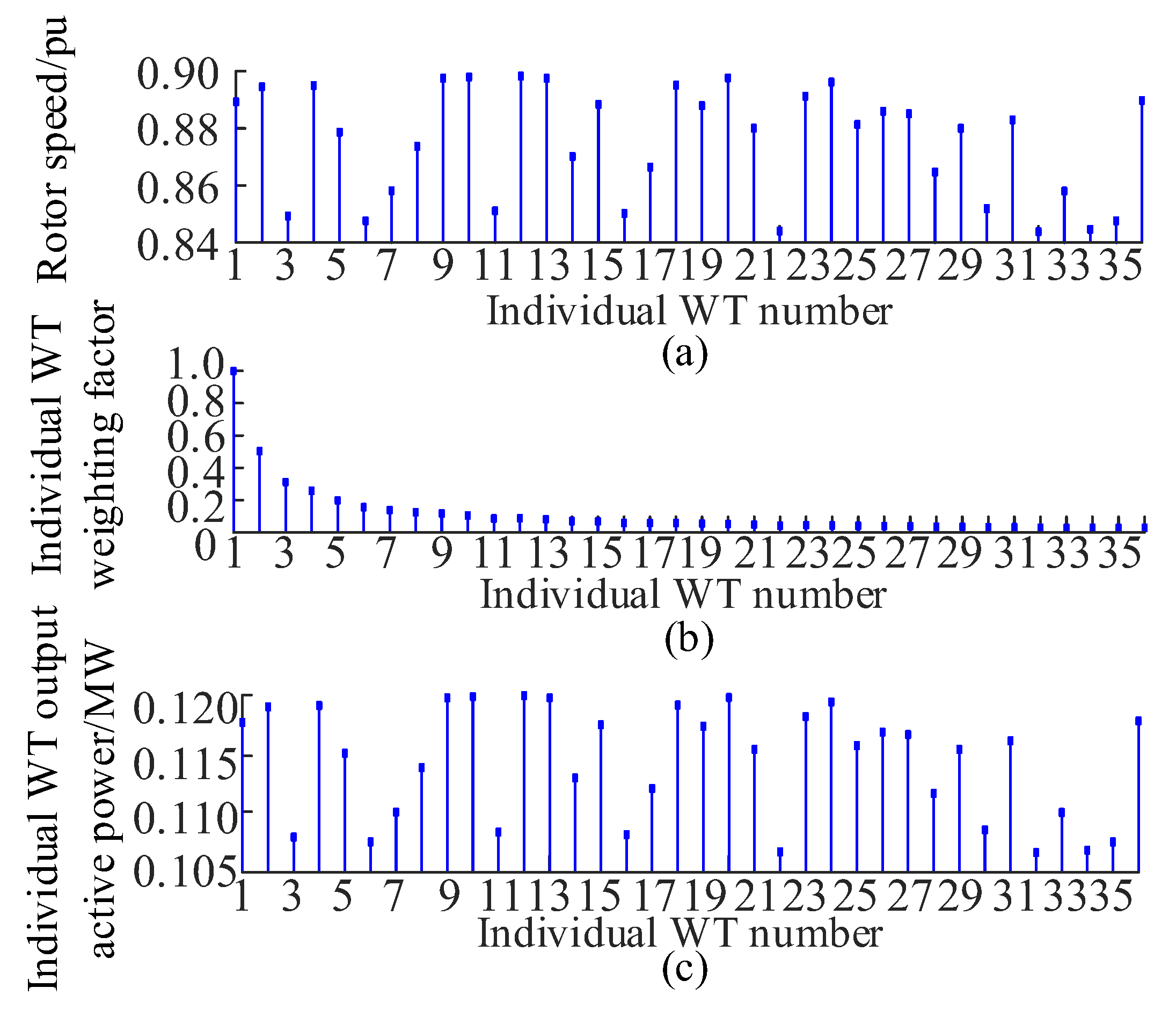
- The rotor speed is used as a weighting factor for the allocation, and the difference in speed between units is utilized to enhance the active output power of the turbine.
- (2)
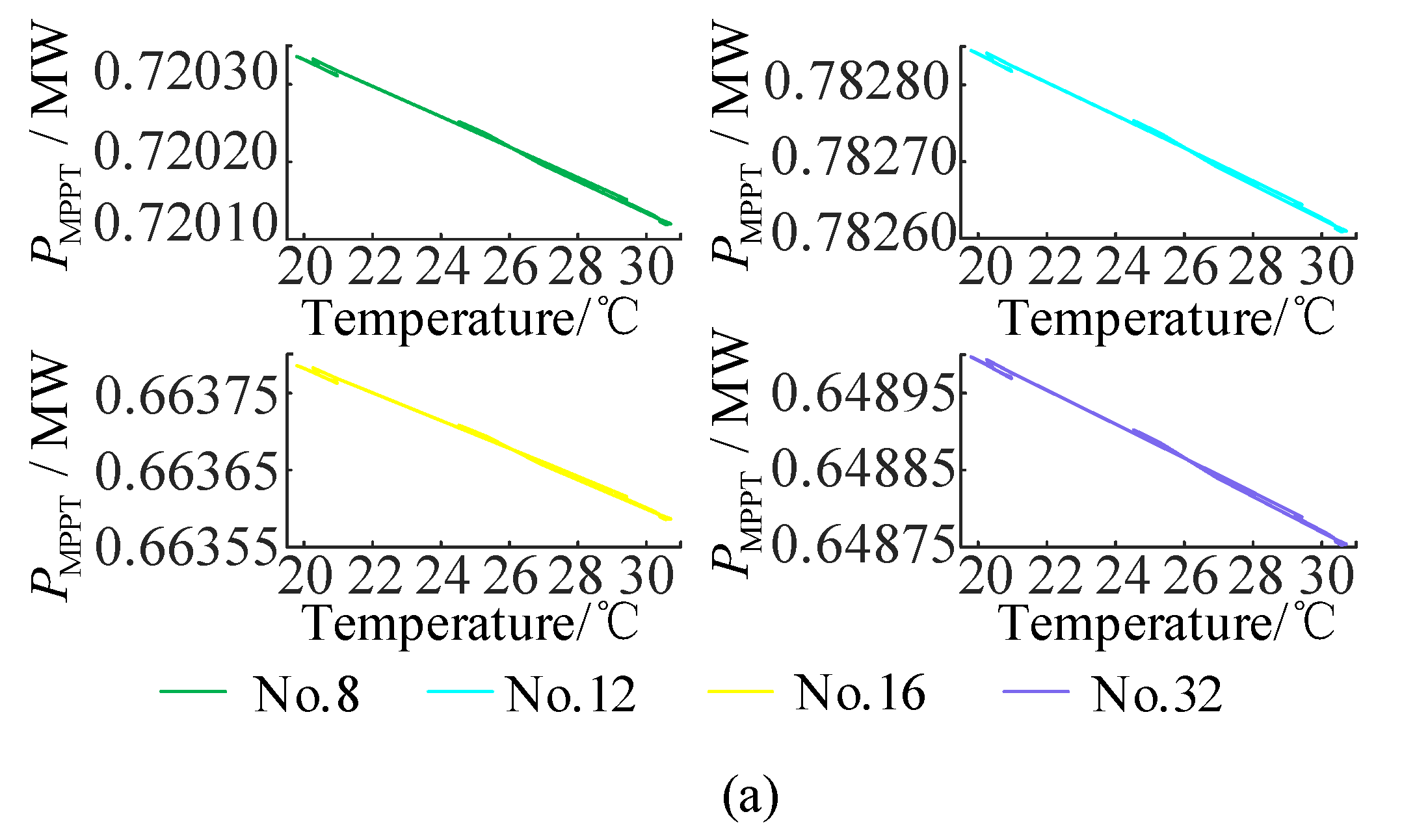
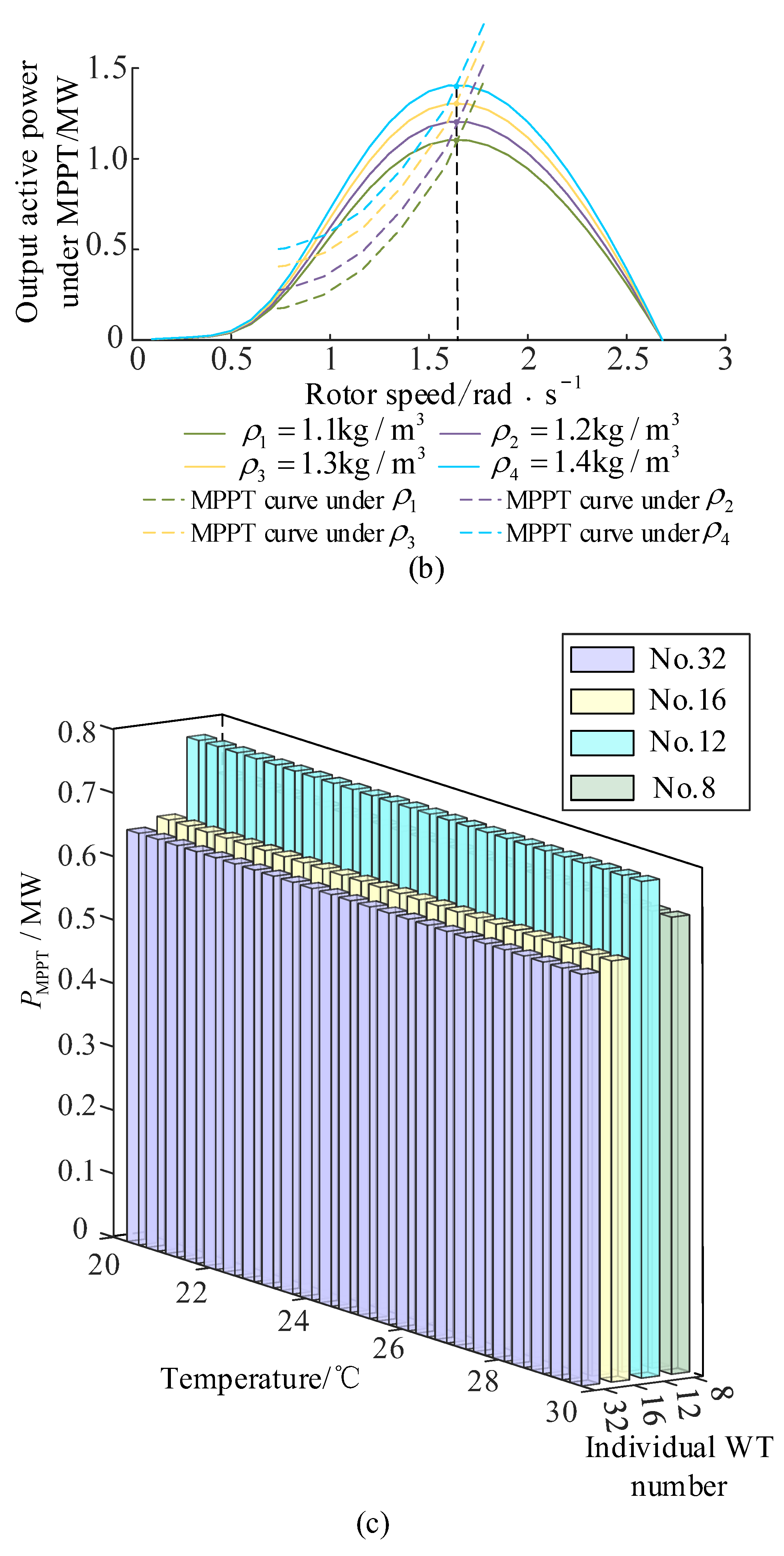
- Consider the effect of environmental factors on the MPPT curve and correct the offset of the MPPT curve in a timely manner.
4. Simulation
4.1. Active Power Allocation Results under Sudden Load Increase
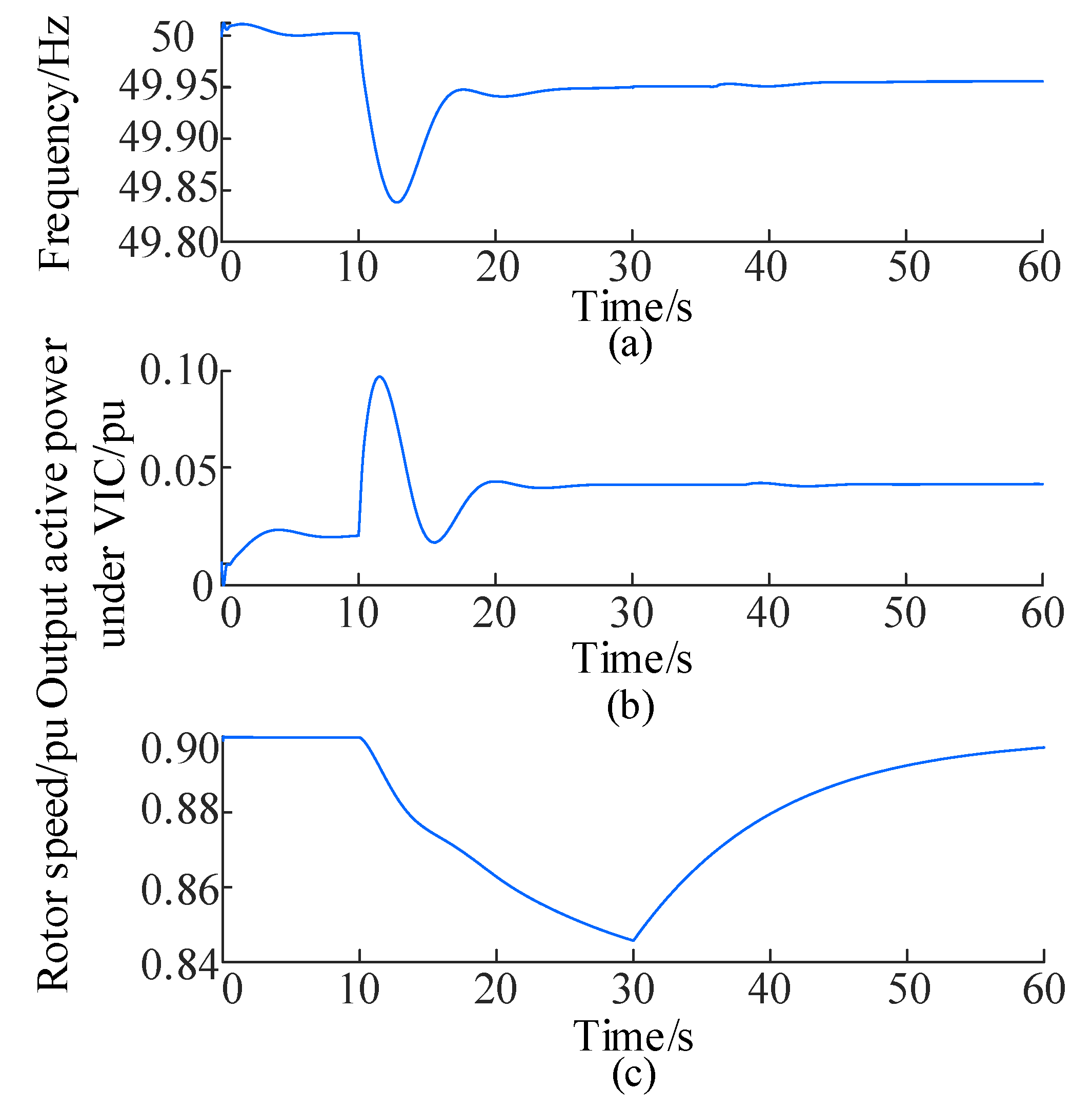
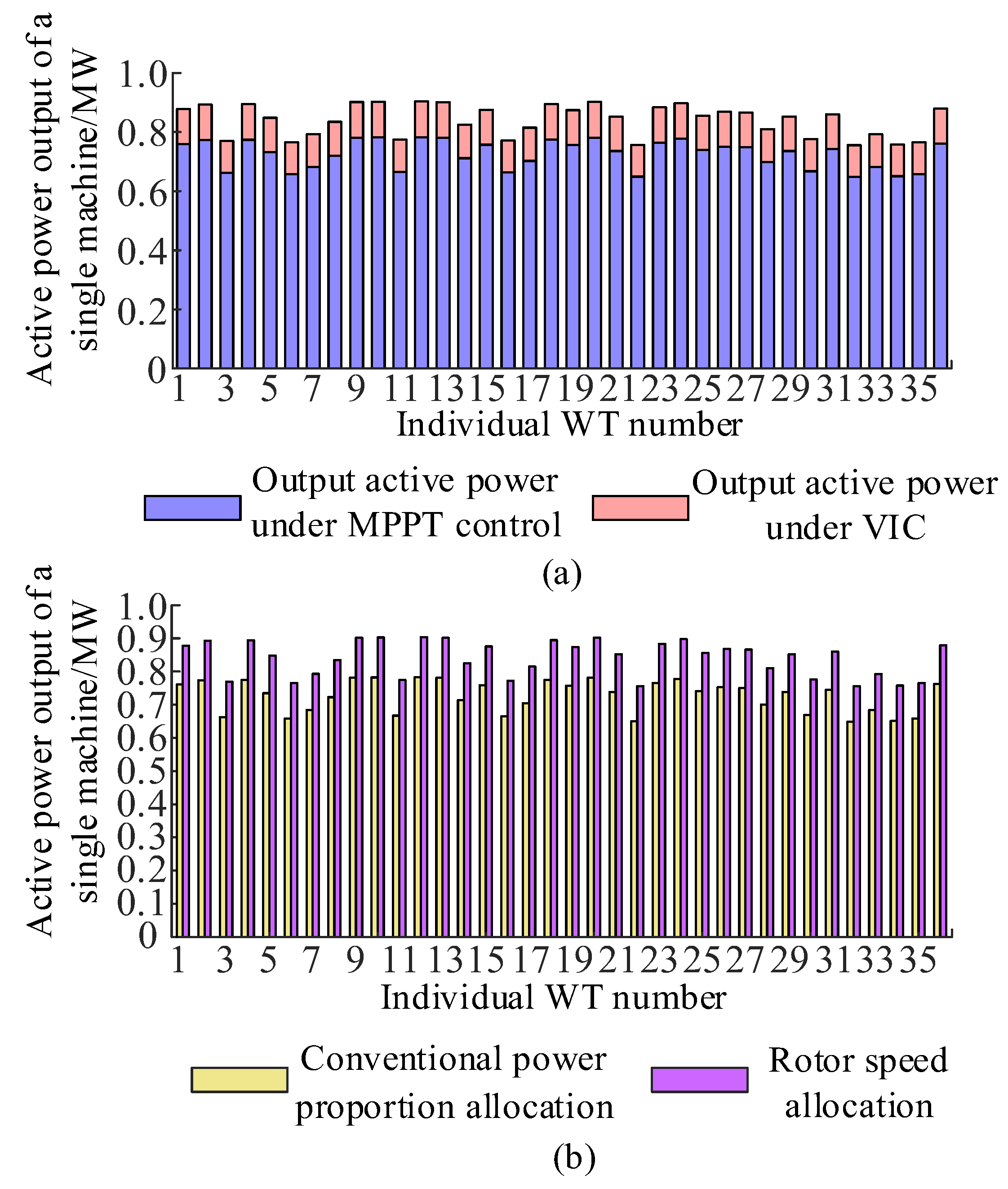
4.1.1. Active Output Power under VIC of a Single
4.1.2. Active Output Power under MPPT Control
4.1.3. Adjustable Amount of Active Power of Single DFIG
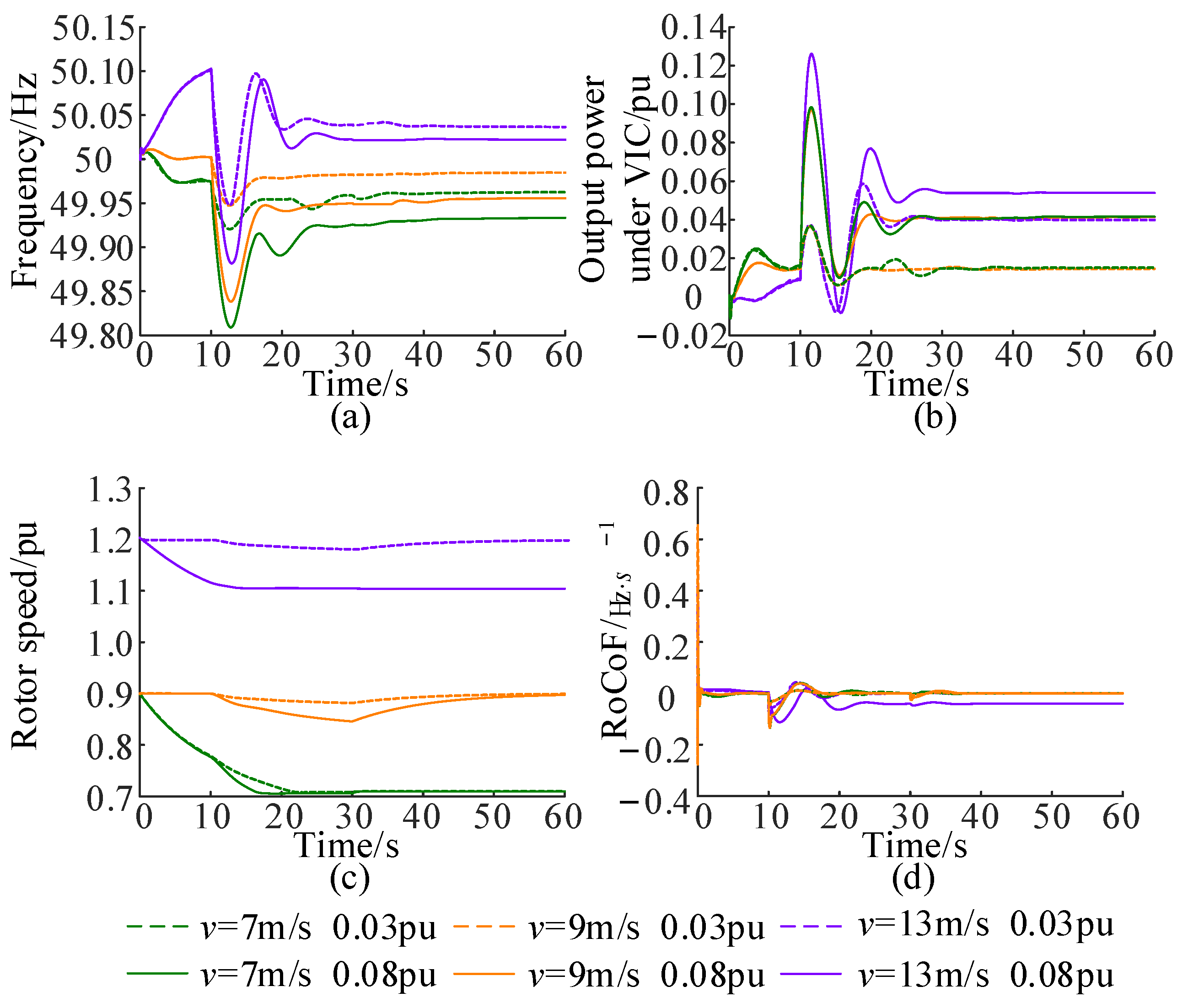
4.2. DFIG Inertia Support Capacity at Different Wind Speeds
4.3. Effect of Active Power Allocation on Inertia Support Capacity
5. Discussion
- (1)
- The large-scale access of wind power to the grid causes the system inertia to decrease, and the stable operation of the system is threatened. To improve the inertia support ability of wind turbines to the system, an active power allocation method based on rotor speed is proposed. The findings indicate that the proposed method improves the active power output from a single wind turbine and enhances the inertia support capability of doubly fed wind turbines to the system.
- (2)
- Figure 8 shows the comparison with the conventional distribution scheme, which shows a significant increase in the active power output from a single turbine. This is because the allocation in this paper utilizes the difference in rotational speed between the units to enhance the output power. Figure 10 shows the comparison with and without the allocation scheme, and the system frequency characteristics can be improved by power allocation, while the inertia support capacity is enhanced. The allocation scheme proposed in this paper improves in two aspects, namely, single unit active power output and inertia support, compared to the previous scheme.
- (3)
- The allocation scheme proposed in this paper is based on rotor speed, which is affected by wind speed. Only the control of the WTGs themselves in the medium and high wind speed zones can satisfy the allocation, while in the low wind speed zones, the turbine outputs less active power due to the low wind speed. Therefore, additional equipment such as energy storage is required.
- (4)
- In the next step of the study, it is considered that wind farms fulfill the system inertia requirements with the help of energy storage devices in low wind speed areas. In the case of using energy storage, the optimal cost is found by comparing the economic cost of different allocation schemes.
- (5)
- There is abundant space for further progress in analyzing the power allocation of wind farm clusters and energy storage aggregation stations to achieve the flexible deployment of resources to support stable system operation.
6. Conclusions
- (1)
- The allocation method makes full use of the inertia regulation capability of a single turbine, which improves the frequency characteristics of the system and increases the frequency nadir.
- (2)
- In the speed recovery stage, considering the inertia and speed constraints of the wind farm under the current wind speed, the frequency secondary drop can be avoided.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Prabhakar, K.; Jain, S.K.; Padhy, P.K. Inertia estimation in modern power system: A comprehensive review. Electr. Power Syst. Res. 2022, 211, 108222. [Google Scholar] [CrossRef]
- Zuhuri, B.; Mossavar-Rahmani, F.; Behgounia, F. Chapter 14—Renewable Energy; Elsevier: Amsterdam, The Netherlands, 2022; pp. 423–463. Available online: https://www.sciencedirect.com/science/article/abs/pii/B9780323951128000143?via%3Dihub (accessed on 15 July 2022).
- Wang, P.; Zhong, P.; Yu, M.; Pu, Y.; Zhang, S.; Yu, P. Trends in energy consumption under the multi-stage development of ICT: Evidence in China from 2001 to 2030. Energy Rep. 2022, 8, 8981–8995. [Google Scholar] [CrossRef]
- Global Wind Energy Council. GWEC Global Wind Report 2023. Available online: http://gwec.net/globalwindreport2023/ (accessed on 10 April 2023).
- Dreidy, M.; Mokhlis, H.; Mekhilef, S. Inertia response and frequency control techniques for renewable energy sources: A review. Renew. Sustain. Energy Rev. 2017, 69, 144–155. [Google Scholar] [CrossRef]
- Heylen, E.; Teng, F.; Strbac, G. Challenges and opportunities of inertia estimation and forecasting in low-inertia power systems. Renew. Sustain. Energy Rev. 2021, 147, 111176. [Google Scholar] [CrossRef]
- Saha, S.; Saleem, M.I.; Roy, T.K. Impact of high penetration of renewable energy sources on grid frequency behaviour. Int. J. Electr. Power Energy Syst. 2023, 145, 142–615. [Google Scholar] [CrossRef]
- El-Bahay, M.H.; Lotfy, M.E.; El-Hameed, M.A. Computational Methods to Mitigate the Effect of High Penetration of Renewable Energy Sources on Power System Frequency Regulation: A Comprehensive Review. Arch. Comput. Methods Eng. 2022, 30, 703–726. [Google Scholar] [CrossRef]
- Guillamón, A.F.; Lázaro, E.G.; Muljadi, E.; García, Á.M. Power systems with high renewable energy sources: A review of inertia and frequency control strategies over time. Renew. Sustain. Energy Rev. 2019, 115, 109369. [Google Scholar] [CrossRef]
- Suo, D. Research on primary frequency modulation control strategy of wind power based on energy storage. J. Phys. Conf. Ser. 2022, 2237, 012021. [Google Scholar] [CrossRef]
- Li, C.; Zhang, Z.; Li, J.; Ma, Y.; Zou, J. Design of Control Strategy and Effect Evaluation for Primary Frequency Regulation of Wind Storage System. Front. Energy Res. 2021, 9, 739439. [Google Scholar] [CrossRef]
- Gao, Z.; Cao, Y.; Zhang, H.; Qin, H.; Yang, D.; Ma, H. Frequency Control Strategy of DFIGs based on Improved Virtual Inertia Method. IOP Conf. Ser. Earth Environ. Sci. 2021, 838, 012010. [Google Scholar] [CrossRef]
- Ma, J.; Jie, H.; Zhou, Y.; Shao, H.; Zhao, S.; Du, Y.; Wang, J.; Sun, S.; Huang, Y.; Shen, Y. A low frequency oscillation suppression method for grid-connected DFIG with virtual inertia. Int. J. Electr. Power Energy Syst. 2023, 144, 108531. [Google Scholar] [CrossRef]
- Liu, J.; Yang, Z.; Yu, J.; Huang, J.; Li, W. Coordinated control parameter setting of DFIG wind farms with virtual inertia control. Int. J. Electr. Power Energy Syst. 2020, 122, 106167. [Google Scholar] [CrossRef]
- Hazari, M.R.; Mannan, M.A.; Muyeen, S.M.; Umemura, A.; Takahashi, R.; Tamura, J. Fuzzy Logic based Virtual Inertia Control of DFIG based Wind Generator for Stability Improvement of Hybrid Power System. IEEJ Trans. Power Energy 2018, 138, 733–744. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, Y.; Fu, Y.; Xu, L. A novel method for obtaining the virtual inertial response of DFIG-based wind turbines. Wind Energy 2015, 19, 313–328. [Google Scholar] [CrossRef]
- Xu, B.; Zhang, L.; Yao, Y.; Yu, X.; Yang, Y.; Li, D. Virtual Inertia Coordinated Allocation Method Considering Inertia Demand and Wind Turbine Inertia Response Capability. Energies 2021, 14, 5002. [Google Scholar] [CrossRef]
- Zhang, X.; Chen, Y.; Wang, Y.; Zha, X.; Yue, S.; Cheng, X.; Gao, L. Deloading Power Coordinated Distribution Method for Frequency Regulation by Wind Farms Considering Wind Speed Differences. IEEE Access 2019, 7, 122573–122582. [Google Scholar] [CrossRef]
- Conrey, J.F.; Waston, R. Frequency response capability of full converter wind turbine generators in comparison to conventional generation. IEEE Trans. Power Syst. 2008, 23, 649–656. [Google Scholar] [CrossRef]
- Deng, H.M.; Tang, L.L.; Wu, X.G.; Qiao, Y.; Liu, F. Active power control strategy of wind farms based on wind turbine regulation ability ranking. Power Syst. Technol. 2018, 42, 2577–2584. [Google Scholar]
- Wang, Z.; Gao, J.; Zhao, B.; Ding, L.; Cao, Y. Wind farm virtual inertia coordinated control technology based on wind speed prediction. Acta Energiae Solaris Sin. 2022, 43, 138. [Google Scholar]
- Meng, X.; Liu, J.; Liu, Z. A generalized droop control for grid-supporting inverter based on a comparison between traditional droop control and virtual synchronous generator control. IEEE Trans. Power Electron. 2018, 34, 5416–5438. [Google Scholar] [CrossRef]
- Chen, Y.; Zhuo, Y.; Liu, Y.; Guan, L.; Lu, C.; Xiao, L. Development and recommendation of fast frequency response market for power system with high proportion of renewable energy. Autom. Electr. Power Syst. 2021, 45, 174–183. [Google Scholar]
- State Administration for Market Regulation; Standardization Administration of China. Technical Specification for Connecting Wind Farm to Power System—Part 1: On Shore Wind Power. 2021. Available online: http://c.gb688.cn/bzgk/gb/showGb?type=online&hcno=F0127C2B431AC283CD6ED17CE67F8E46 (accessed on 20 August 2021).
- Jensen, N.O. A note on wind generator interaction. In Roskilde, Denmark: Risø National Laboratory; Risø National Laboratory: Roskilde, Denmark, 1983; Volume 2411. [Google Scholar]
- Picard, A.; Davis, R.S.; Gläser, M.; Fujii, K. Revised formula for the density of moist air (CIPM-2007). Metrologia 2008, 45, 149. [Google Scholar] [CrossRef]
- IEC 61400-12-1; Part 12-1: Power Performance Measurements of Electricity Producing Wind Turbines. IEC (International Electrotechnical Commission): Geneva, Switzerland, 2005.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Module | Parameters | Symbol | Value |
|---|---|---|---|
| Wind turbine | Rotor radius | R/m | 38.5 |
| Optimal wind energy utilization factor | Cpopt | 0.4335 | |
| Optimal leaf tip speed ratio | λopt | 7.2 | |
| Wind speed | v/m·s−1 | 9 | |
| DFIG | Rated active power | PNA/MW | 1.5 |
| Rated voltage | UNA/V | 575 | |
| Polar logarithm | p | 3 | |
| Synchronous generator | Rated capacity | SNS/MW | 800 |
| Rated voltage | UNS/V | 18,000 | |
| Polar logarithm | p | 1 | |
| Inertial time constant | HG/s | 4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Li, F. Active Power Allocation Method of Doubly Fed Induction Generators Based on Rotor Speed. Electronics 2024, 13, 279. https://doi.org/10.3390/electronics13020279
Li M, Li F. Active Power Allocation Method of Doubly Fed Induction Generators Based on Rotor Speed. Electronics. 2024; 13(2):279. https://doi.org/10.3390/electronics13020279
Chicago/Turabian StyleLi, Muxi, and Fengting Li. 2024. "Active Power Allocation Method of Doubly Fed Induction Generators Based on Rotor Speed" Electronics 13, no. 2: 279. https://doi.org/10.3390/electronics13020279