

A Method for Visualization of Images by Photon-Counting Imaging Only Object Locations under Photon-Starved Conditions

Abstract
:1. Introduction
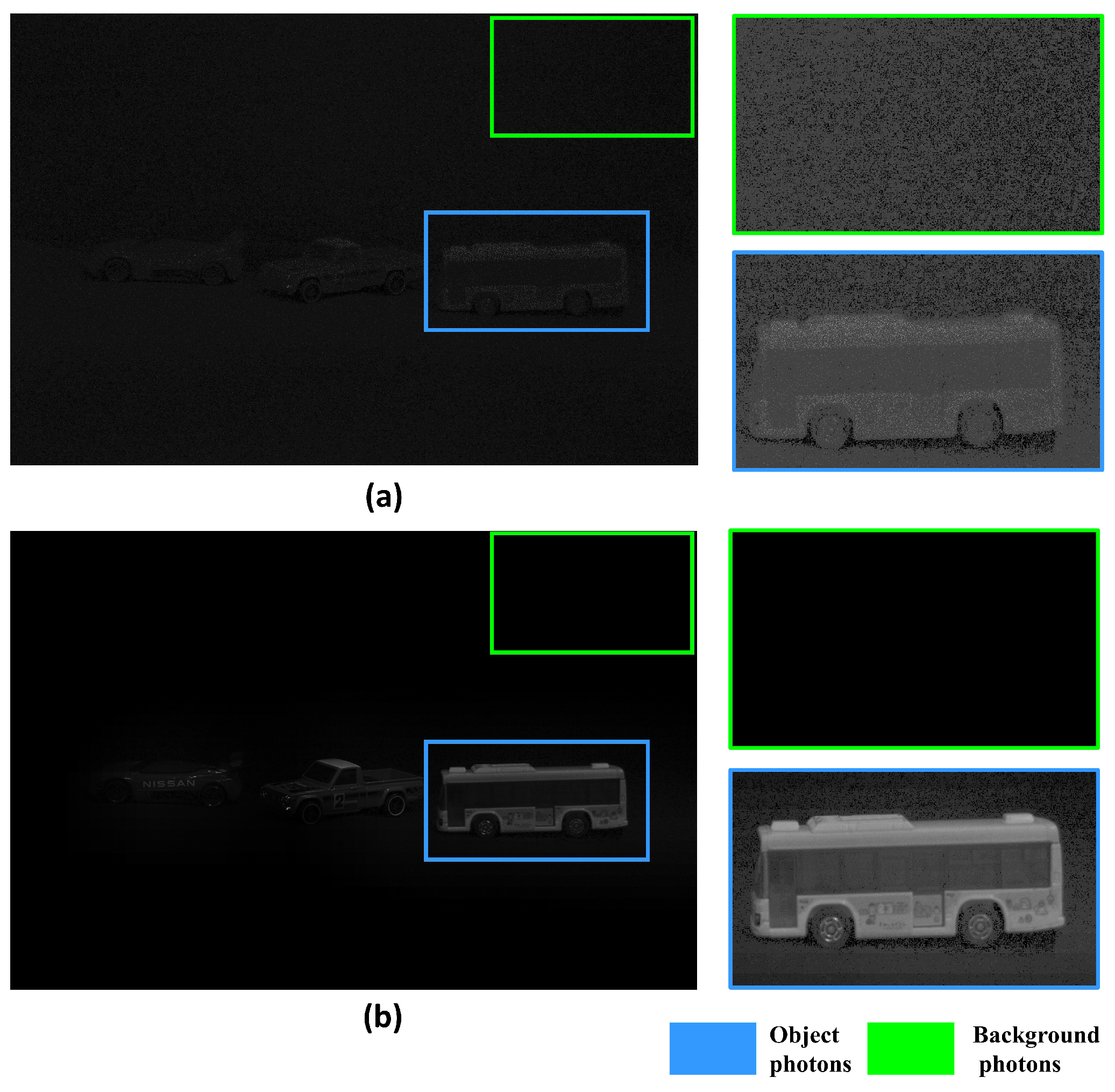
2. Reducing Background Noise by Estimating Photons Only in the Object Area
2.1. Photon-Counting Imaging
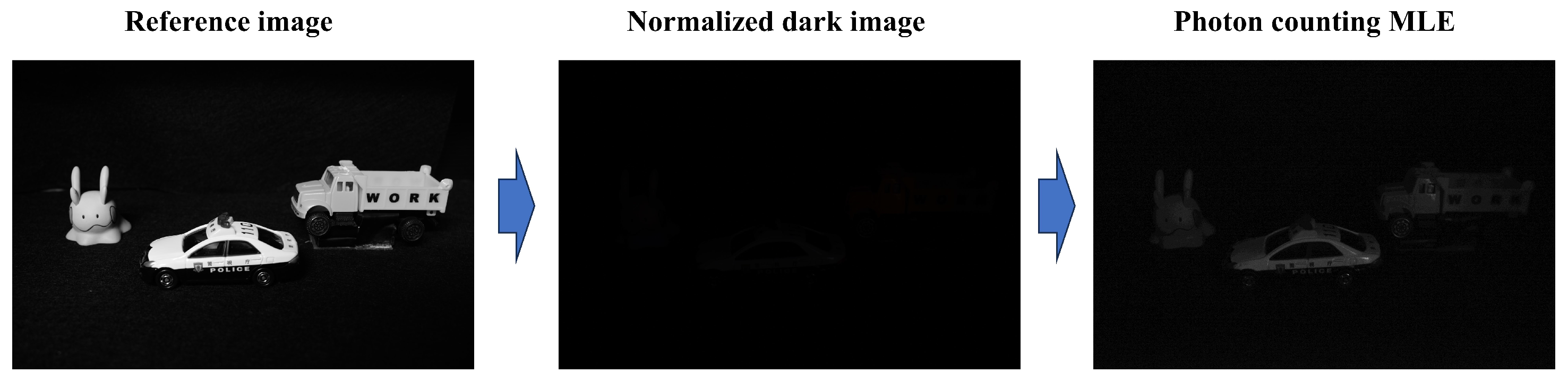
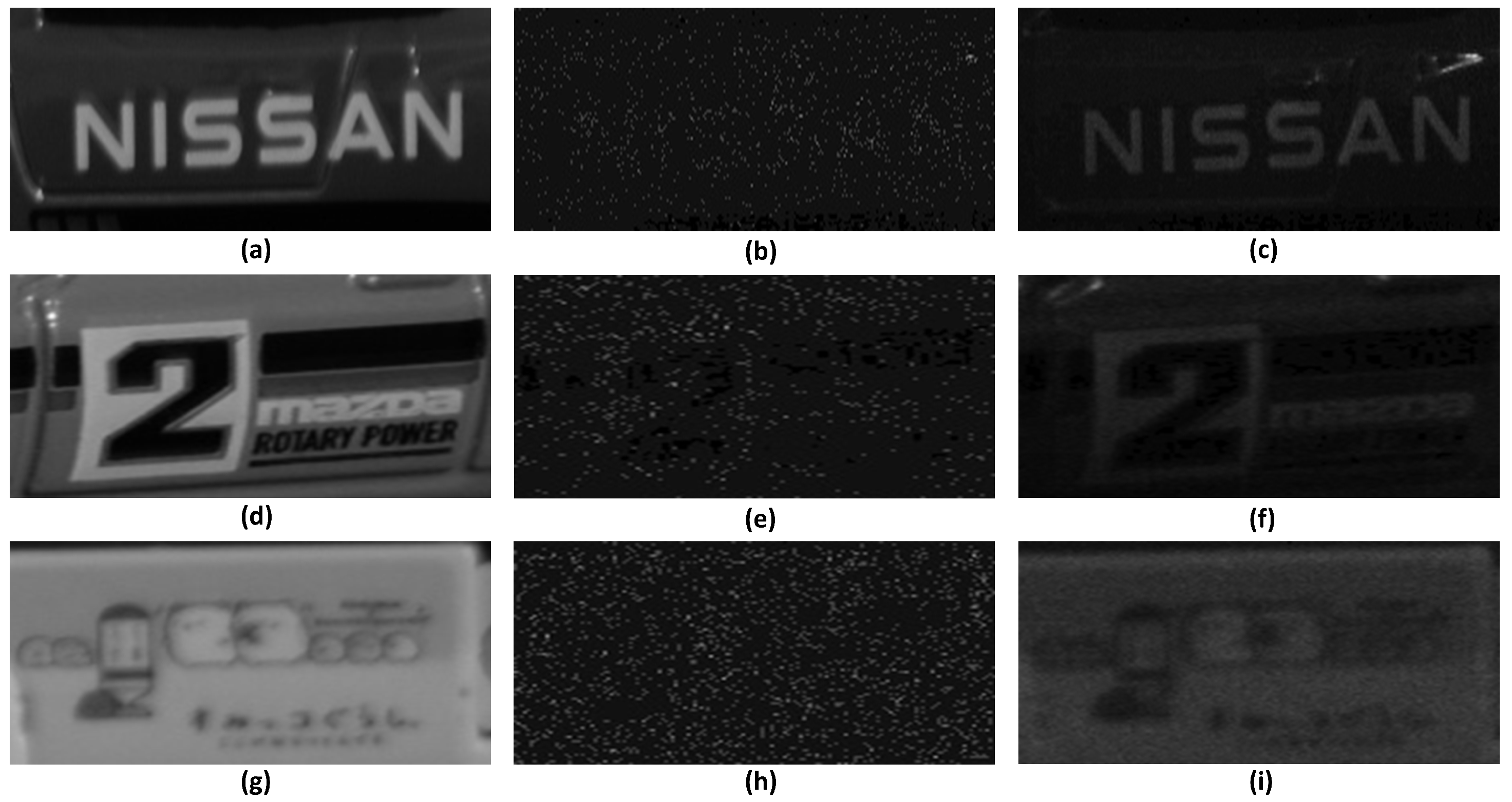
2.2. Proposed Method
3. Experimental Setup and Results
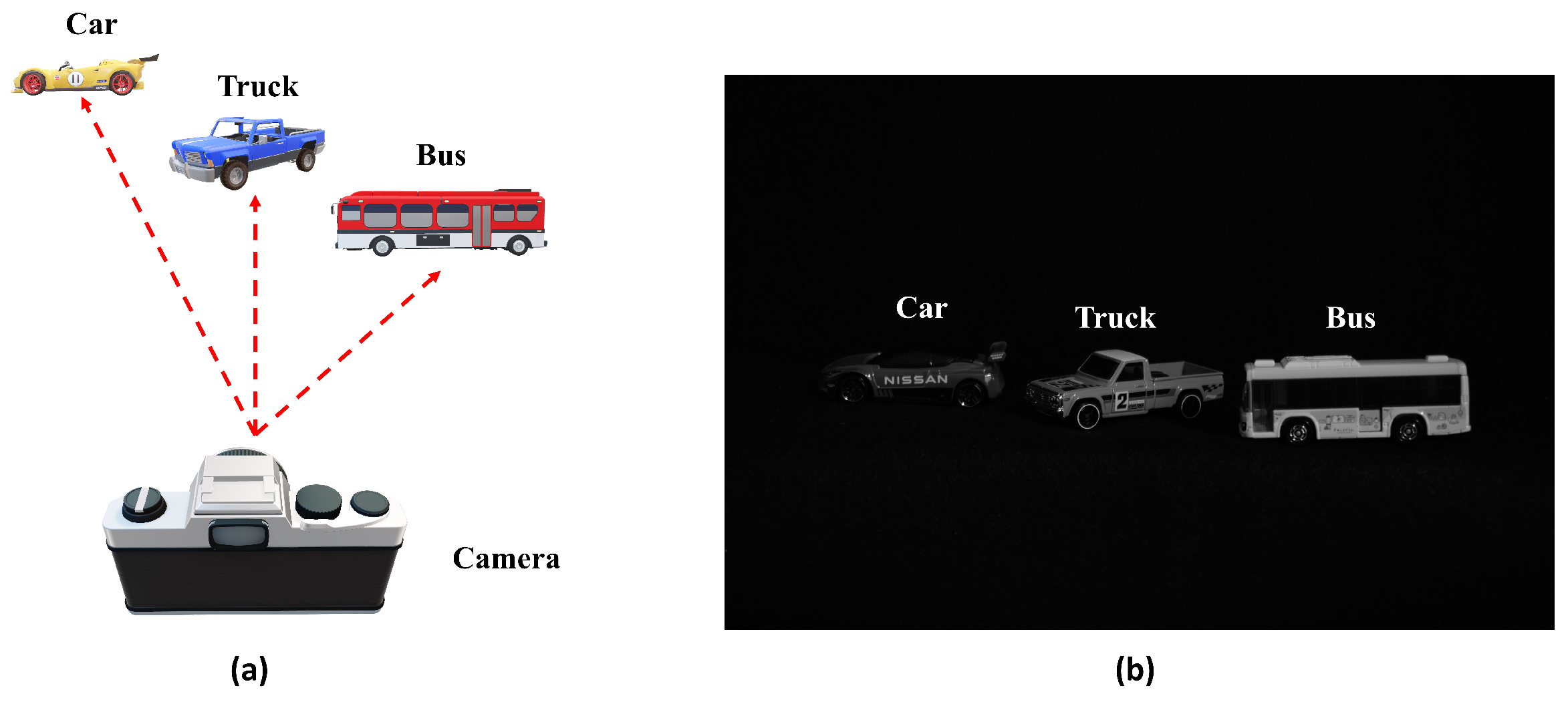
3.1. Experimental Setup
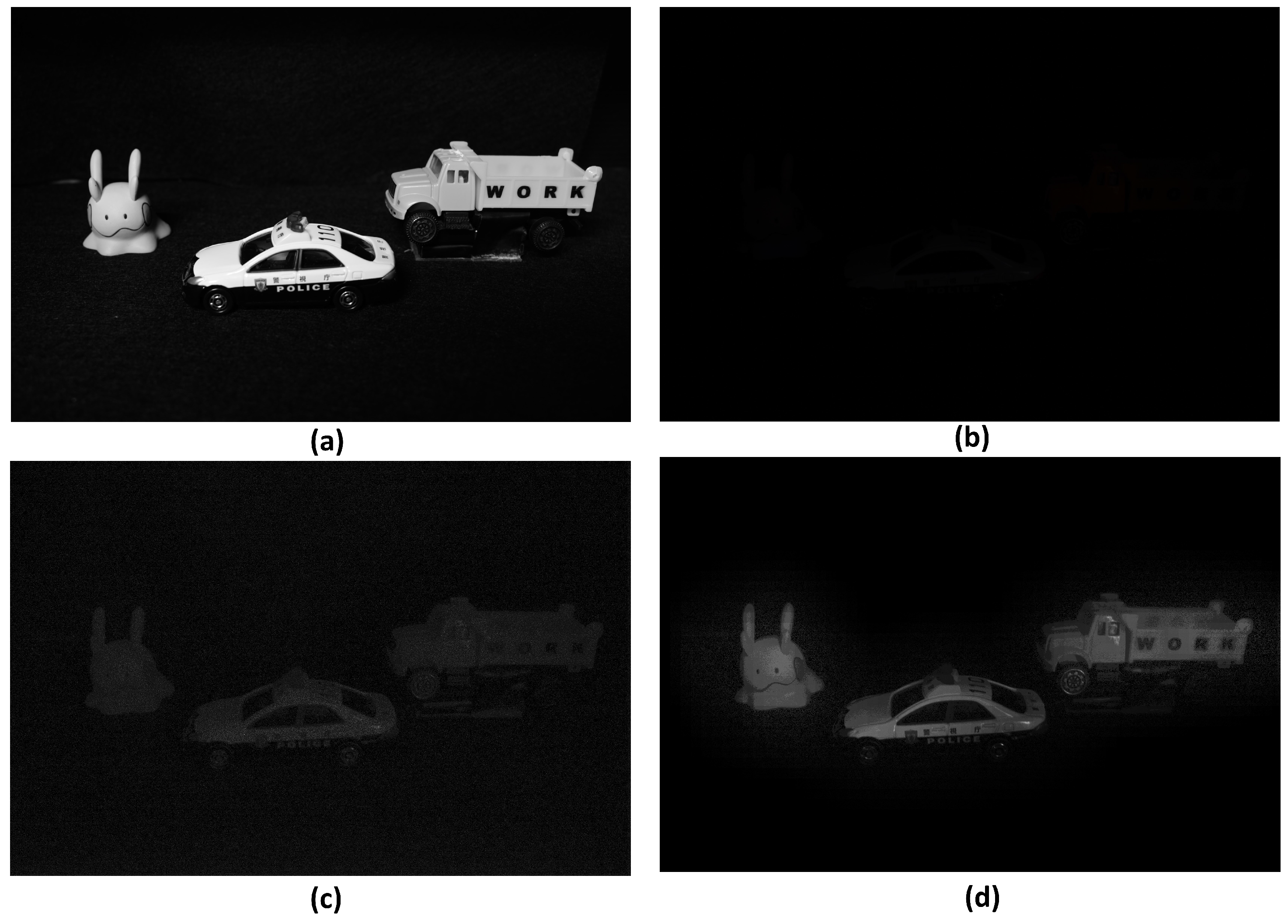
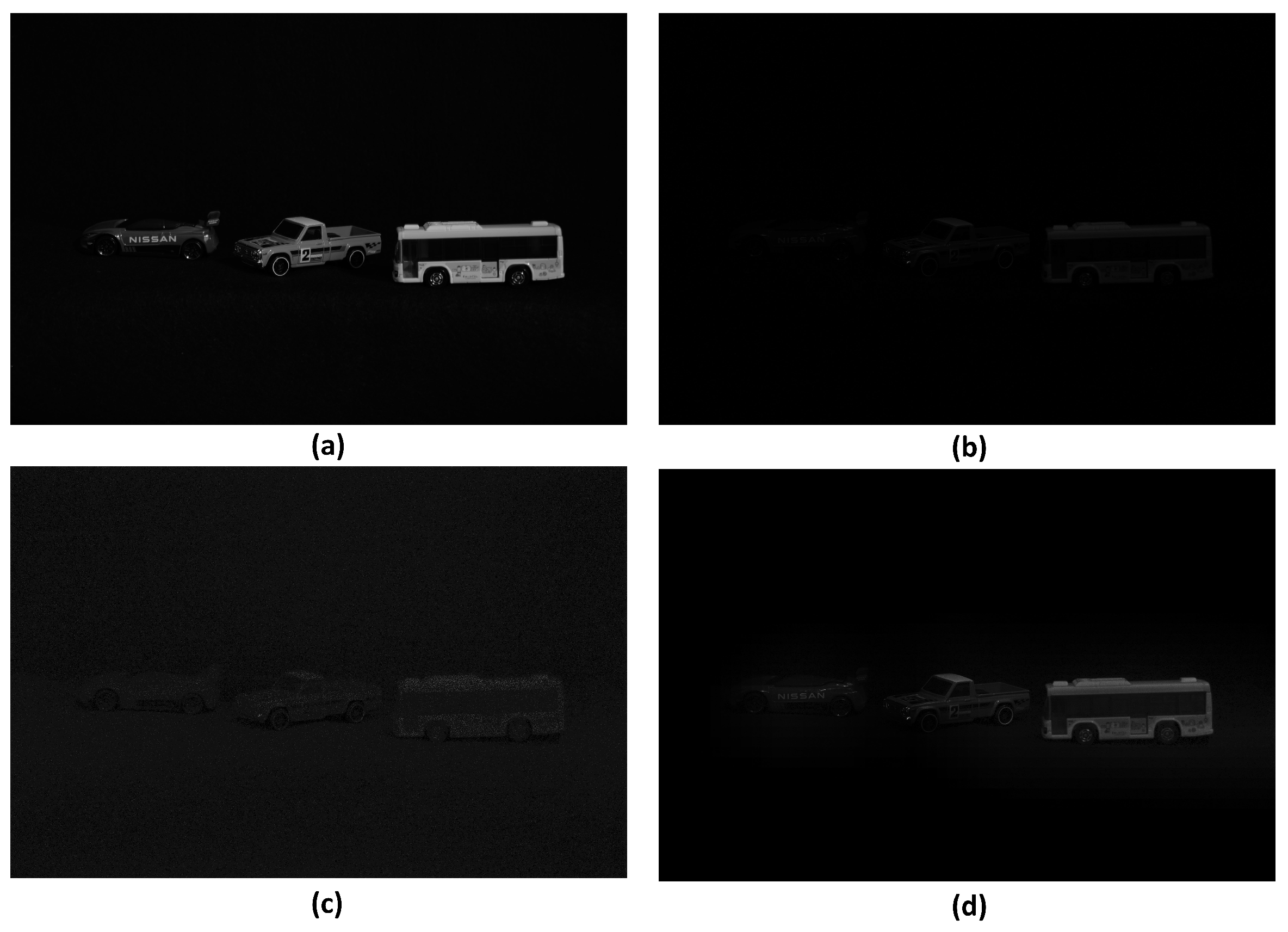
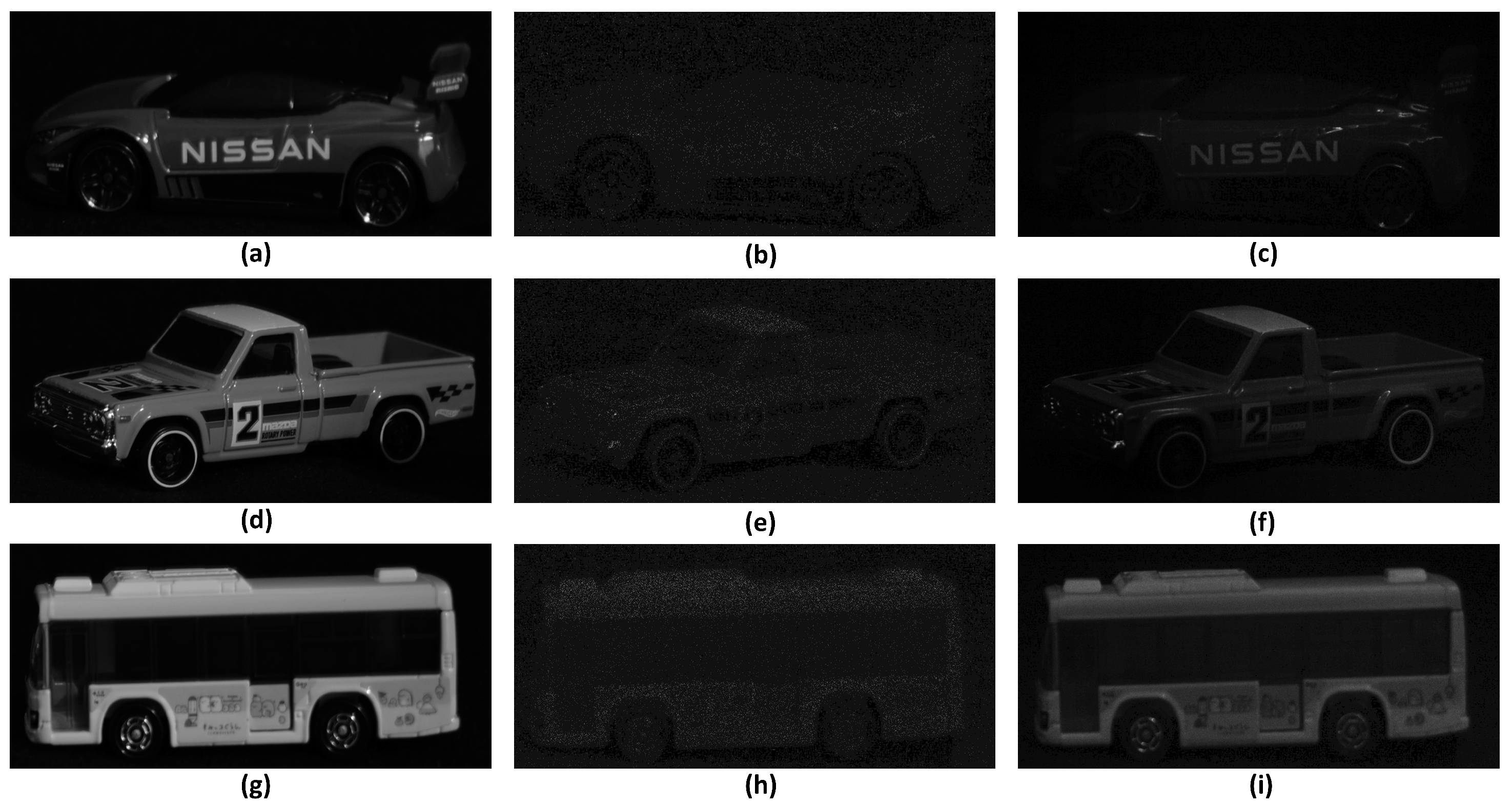
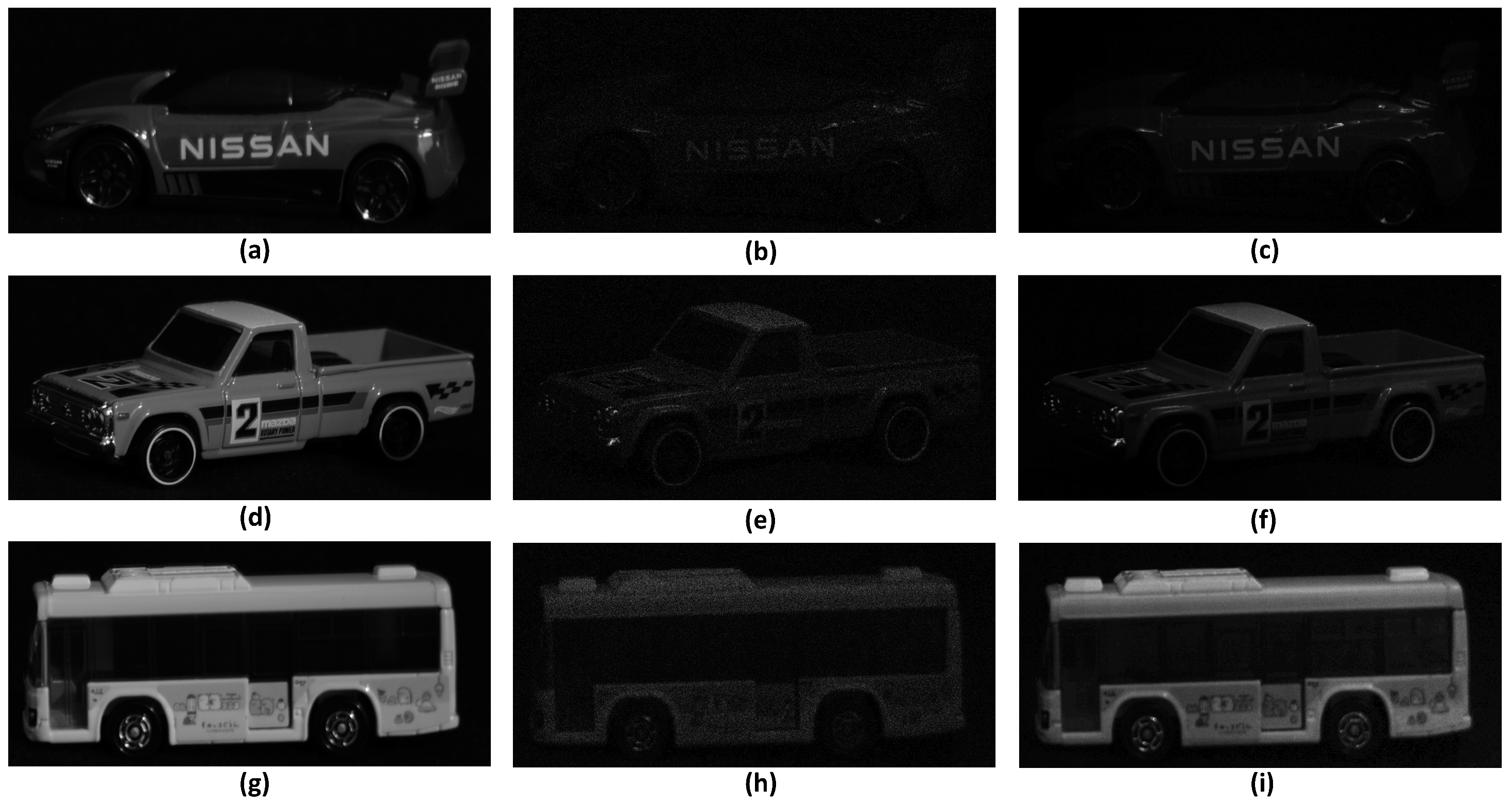
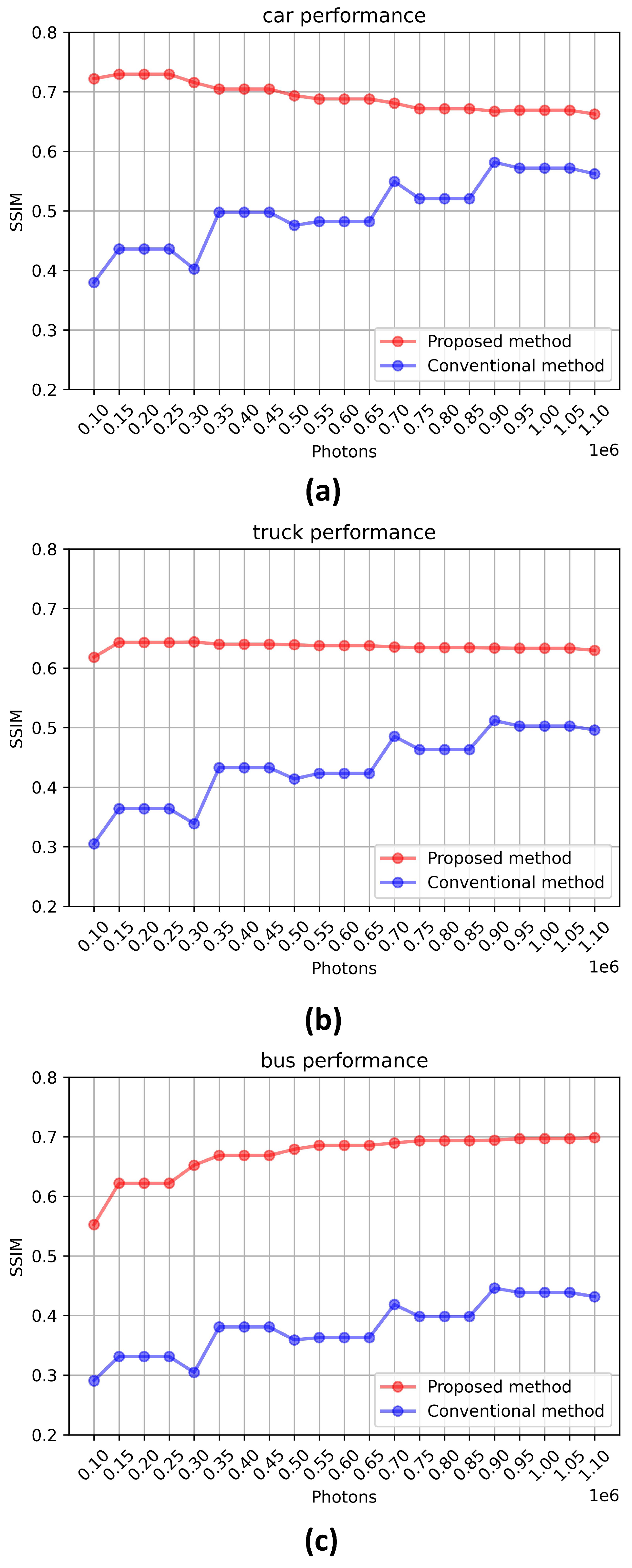
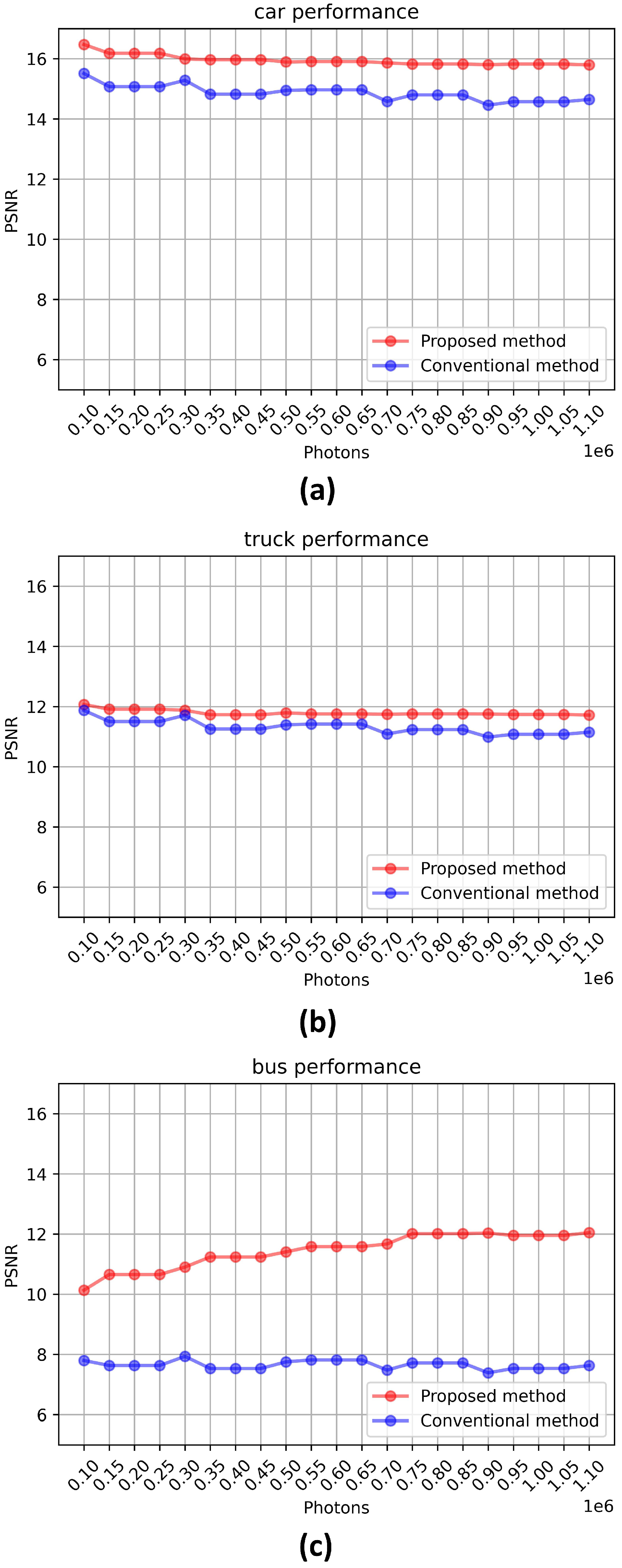
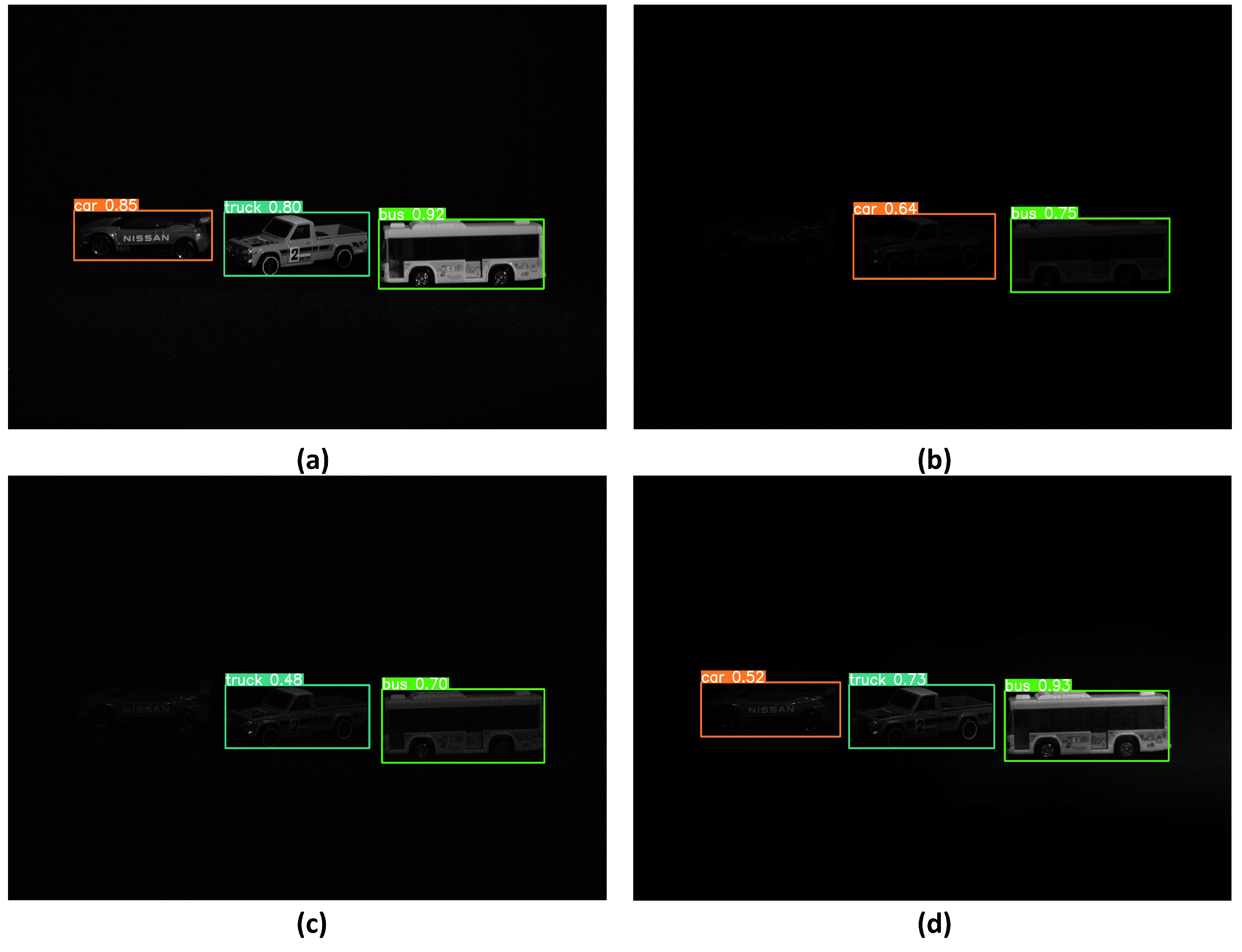
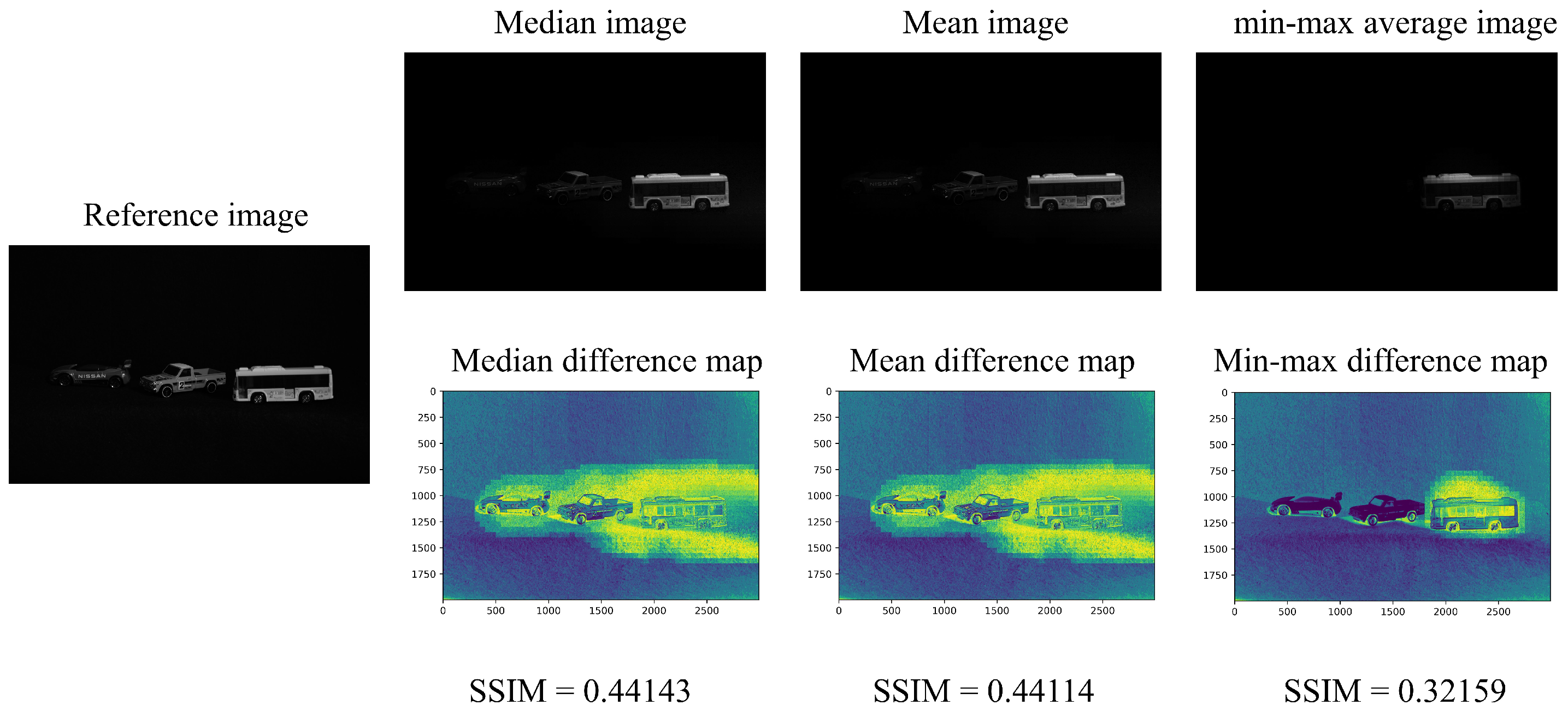
3.2. Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Morton, G. Photon counting. Appl. Opt. 1968, 7, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Kröger, H.; Schmidt, G.; Pailer, N. Faint object camera: European contribution to the Hubble Space Telescope. Acta Astronaut. 1992, 26, 827–834. [Google Scholar] [CrossRef]
- Brandt, J.; Heap, S.; Beaver, E.; Boggess, A.; Carpenter, K.; Ebbets, D.; Hutchings, J.; Jura, M.; Leckrone, D.; Linsky, J.; et al. The Goddard high resolution spectrograph: Instrument, goals, and science results. Publ. Astron. Soc. Pac. 1994, 106, 890. [Google Scholar] [CrossRef]
- Adorf, H.M. Hubble space telescope image restoration in its fourth year. Inverse Probl. 1995, 11, 639. [Google Scholar] [CrossRef]
- Sirianni, M.; Jee, M.; Benítez, N.; Blakeslee, J.; Martel, A.; Meurer, G.; Clampin, M.; De Marchi, G.; Ford, H.; Gilliland, R.; et al. The photometric performance and calibration of the Hubble Space Telescope Advanced Camera for Surveys. Publ. Astron. Soc. Pac. 2005, 117, 1049. [Google Scholar] [CrossRef]
- Freedman, W.L.; Madore, B.F.; Gibson, B.K.; Ferrarese, L.; Kelson, D.D.; Sakai, S.; Mould, J.R.; Kennicutt, R.C., Jr.; Ford, H.C.; Graham, J.A.; et al. Final results from the Hubble Space Telescope key project to measure the Hubble constant. Astrophys. J. 2001, 553, 47. [Google Scholar] [CrossRef]
- Riess, A.G.; Yuan, W.; Macri, L.M.; Scolnic, D.; Brout, D.; Casertano, S.; Jones, D.O.; Murakami, Y.; Anand, G.S.; Breuval, L.; et al. A comprehensive measurement of the local value of the Hubble constant with 1 km s-1 Mpc-1 uncertainty from the Hubble Space Telescope and the SH0ES team. Astrophys. J. Lett. 2022, 934, L7. [Google Scholar] [CrossRef]
- Richmond, C. Sir Godfrey Hounsfield. BMJ Brit. Med. J. 2004, 329, 687. [Google Scholar] [CrossRef]
- Buzug, T.M. Computed tomography. In Springer Handbook of Medical Technology; Springer: Titisee, Germany, 2011; pp. 311–342. [Google Scholar]
- Willemink, M.J.; Persson, M.; Pourmorteza, A.; Pelc, N.J.; Fleischmann, D. Photon-counting CT: Technical principles and clinical prospects. Radiology 2018, 289, 293–312. [Google Scholar] [CrossRef]
- Flohr, T.; Petersilka, M.; Henning, A.; Ulzheimer, S.; Ferda, J.; Schmidt, B. Photon-counting CT review. Physica Med. 2020, 79, 126–136. [Google Scholar] [CrossRef]
- Tortora, M.; Gemini, L.; D’Iglio, I.; Ugga, L.; Spadarella, G.; Cuocolo, R. Spectral photon-counting computed tomography: A review on technical principles and clinical applications. J. Imaging 2022, 8, 112. [Google Scholar] [CrossRef] [PubMed]
- Leng, S.; Bruesewitz, M.; Tao, S.; Rajendran, K.; Halaweish, A.F.; Campeau, N.G.; Fletcher, J.G.; McCollough, C.H. Photon-counting detector CT: System design and clinical applications of an emerging technology. Radiographics 2019, 39, 729–743. [Google Scholar] [CrossRef] [PubMed]
- Kreisler, B. Photon counting Detectors: Concept, technical Challenges, and clinical outlook. Eur. J. Radiol. 2022, 149, 110229. [Google Scholar] [CrossRef] [PubMed]
- Hsieh, S.S.; Leng, S.; Rajendran, K.; Tao, S.; McCollough, C.H. Photon counting CT: Clinical applications and future developments. IEEE Trans. Radiat. Plasma Med. Sci. 2020, 5, 441–452. [Google Scholar] [CrossRef] [PubMed]
- Myung, I.J. Tutorial on maximum likelihood estimation. J. Math. Psychol. 2003, 47, 90–100. [Google Scholar] [CrossRef]
- Guillaume, M.; Melon, P.; Réfrégier, P.; Llebaria, A. Maximum-likelihood estimation of an astronomical image from a sequence at low photon levels. J. Opt. Soc. Am. A 1998, 15, 2841–2848. [Google Scholar] [CrossRef]
- Aloni, D.; Stern, A.; Javidi, B. Three-dimensional photon counting integral imaging reconstruction using penalized maximum likelihood expectation maximization. Opt. Express 2011, 19, 19681–19687. [Google Scholar] [CrossRef]
- Bassett, R.; Deride, J. Maximum a posteriori estimators as a limit of Bayes estimators. Math. Program. 2019, 174, 129–144. [Google Scholar] [CrossRef]
- Kuin, N.; Rosen, S. The measurement errors in the Swift-UVOT and XMM-OM. Mon. Not. R. Astron. Soc. 2008, 383, 383–386. [Google Scholar] [CrossRef]
- Lee, J.; Kurosaki, M.; Cho, M.; Lee, M.C. Noise Reduction for Photon Counting Imaging Using Discrete Wavelet Transform. J. Inf. Commun. Converg. Eng. 2021, 19, 276–283. [Google Scholar]
- Kim, H.W.; Cho, M.; Lee, M.C. Three-Dimensional (3D) Visualization under Extremely Low Light Conditions Using Kalman Filter. Sensors 2023, 23, 7571. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.; Cho, M. Enhancement of three-dimensional image visualization under photon-starved conditions. Appl. Opt. 2022, 61, 6374–6382. [Google Scholar] [CrossRef] [PubMed]
- Tavakoli, B.; Javidi, B.; Watson, E. Three dimensional visualization by photon counting computational integral imaging. Optics Express 2008, 16, 4426–4436. [Google Scholar] [CrossRef] [PubMed]
- Markman, A.; Javidi, B.; Tehranipoor, M. Photon-counting security tagging and verification using optically encoded QR codes. IEEE Photonics J. 2013, 6, 1–9. [Google Scholar] [CrossRef]
- Markman, A.; Javidi, B. Full-phase photon-counting double-random-phase encryption. JOSA A 2014, 31, 394–403. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process 2004, 13, 600–612. [Google Scholar] [CrossRef]
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing, 4th ed.; Pearson: New York, NY, USA, 2018. [Google Scholar]
- Jiang, P.; Ergu, D.; Liu, F.; Cai, Y.; Ma, B. A Review of Yolo algorithm developments. Procedia Comput. Sci. 2022, 199, 1066–1073. [Google Scholar] [CrossRef]
- Lee, J.; Cho, M.; Lee, M.C. 3D Visualization of Objects in Heavy Scattering Media by Using Wavelet Peplography. IEEE Access 2022, 10, 134052–134060. [Google Scholar] [CrossRef]
- Hong, S.H.; Jang, J.S.; Javidi, B. Three-dimensional volumetric object reconstruction using computational integral imaging. Opt. Express 2004, 12, 483–491. [Google Scholar] [CrossRef]
- Schulein, R.; DaneshPanah, M.; Javidi, B. 3D imaging with axially distributed sensing. Opt. Lett. 2009, 34, 2012–2014. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Setup | Nikon D5300 | |
|---|---|---|
| Resolution | 2992 × 2000 | |
| Sensor size | 23.5 mm × 15.7 mm | |
| Section size | 400 × 400 | |
| Section shifting pixel | 50 | |
| Focal length | 5 mm | |
| ISO | 160 | |
| Shutter speed | Normal | 5 s |
| Extremely low-light | 180 s | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ha, J.-U.; Kim, H.-W.; Cho, M.; Lee, M.-C. A Method for Visualization of Images by Photon-Counting Imaging Only Object Locations under Photon-Starved Conditions. Electronics 2024, 13, 38. https://doi.org/10.3390/electronics13010038
Ha J-U, Kim H-W, Cho M, Lee M-C. A Method for Visualization of Images by Photon-Counting Imaging Only Object Locations under Photon-Starved Conditions. Electronics. 2024; 13(1):38. https://doi.org/10.3390/electronics13010038
Chicago/Turabian StyleHa, Jin-Ung, Hyun-Woo Kim, Myungjin Cho, and Min-Chul Lee. 2024. "A Method for Visualization of Images by Photon-Counting Imaging Only Object Locations under Photon-Starved Conditions" Electronics 13, no. 1: 38. https://doi.org/10.3390/electronics13010038