1. Introduction
System parameter identification (SPI) uses the input and output histories to establish to describe its dynamic behavior [
1,
2,
3,
4]. Several data-driven identification methods for a nonlinear mechanical system can be found in [
5,
6]. The reason why SPI is important is that system parameters coupling with states would have a great effect on the system’s dynamic response. Namely, those parameters represent the system’s features. If those parameters can be identified accurately, it is without a doubt that the procedure of designing a control law will become more time-saving, efficient, and robust.
Nevertheless, without an accurate dynamic model, all attempts at parameter identification and rule-based controller designs are inefficient or even futile. Thus, establishing an accurate system model becomes the primary step. In the past decade, significant progress has been made in the research on self-stabilizing two-wheeled robots. Various models and controllers have been employed to interpret and control the dynamics of two-wheeled robots. Further research on the dynamic modeling of two-wheeled robots is also reviewed in [
7]. There are several ways to derive the wheel-driven pendulum’s dynamics equation, such as the Newton methods [
8] and the Lagrangian dynamic theorem [
9]. Among different approaches, this paper adopts the Lagrangian dynamic theorem owing to its systematic formulation procedures. Moreover, due to the unstable nature of an inverted pendulum, a simple PID controller must be applied firstly to stabilize the system’s attitude when conducting the SPI processes.
Secondly, based on the derived model, it can be found that the SPI can be formulated as a standard LS solution. The LS method is widely applied in parameter identifications [
10,
11]. According to the LS, an over-determined normal equation
is formulated, where the output vector
and the observation matrix
are the key measurements to determine the parameter vector
accurately. To fulfill the observation matrix
, some states need to be estimated through numerical differentiation [
12,
13]. Nonetheless, from the practical realization point of view, the wheel angle data measured from encoders are subjected to quantization effect. Meanwhile, the measured pitch angle and angular velocity from an orientation sensor, such as the inertial measurement unit (IMU), would accompanied by inevitable Gaussian noise. As pointed out in [
14], the measurement noise will be amplified if
and
contain serious noise, which further gives rise to a negative influence on parameter identification.
To address the potential issue discussed above, the filter regression model is applied to the identification methodology for robot manipulators and industrial robots, eliminating the need for either the measurement or off-line calculation of the linear and angular accelerations [
15,
16,
17,
18,
19]. Inspired by the works [
20,
21], an output filtering method is considered to tackle this problem and is applied to the unstable wheel-driven pendulum system. The advantage of the presented method is that the observation matrix of the filtering method does not contain the raw noise corrupted measurements, the filtered ones are adopted instead. Moreover, there is no need to involve the acceleration information, which is not directly available from sensors. Refer to the associated studies [
22,
23]; they present an energy-based regression model that only involves position and velocity. This approach avoids using numerical differentiation for acceleration estimations and applies integration on the joint/motor velocities. However, there is no extra degree of freedom to adjust the pure integration, which can be taken as a special case of a low-pass filter. Therefore, the command trajectories should be properly designed. Recent research [
24] has emphasized the significance of coarse encoder quantization errors in angular measurements, which introduce noise affecting the estimation of velocity and acceleration. Consequently, the article addresses this issue by applying the filter-based method. Notably, in comparison to the differentiation-based method found in the existing literature, the filter-based primary feature is its avoidance of direct differentiation for velocity information acquisition. Moreover, the filter-based approach offers a more efficient approach to mitigate the influence of quantization noise. Experimental results presented in [
24] affirm that filter-based SPI surpasses differentiation-based SPI in terms of parameter estimation accuracy. However, a simple stable motor system was presented [
24]. To exploration the potential capability of the filter-based method, this work applied it to highly nonlinear unstable wheel-driven pendulum system.
Note that the selection of a filtering operator is highly important. A great integral operator should preserve the system’s dominant frequencies and filter out the unwanted noises. Otherwise, the integral operator might distort the dominant frequencies or could not remove the redundant noises. In summary, the importance of SPI mainly includes two parts: first, SPI allows control engineers to develop a robust control law more easily; second, dynamics modeling together with SPI can be used as a digital twin to monitor the system behavior online [
25].
The main contributions of the paper are summarized as follows: (1) extending the filter-based SPI to a nonlinear unstable wheel-driven pendulum system; (2) presenting an output filtering method which can suppress the Gaussian noise and quantization noise effects; (3) conducting a performance comparison study between the proposed output filtering method and the direct numerical differentiation method; and (4) demonstrating the use of aggressive command input citation can enhance the precision of the parameter estimations.
4. Numerical Simulation of the Filtering Method
The following simulation is performed in MATLAB/Simulink with the solver Runge-Kutta 4, where the time-step s is applied. Since the wheel-driven pendulum cart is unstable, to meet the real situation when conducting SPI, a simple proportional–integral–derivative (PID) controller is implemented based on the linearized model applied to stabilize the cart’s attitude. The control gains are adjusted as follows: the proportional (P) gain, the integral (I) gain and the derivative (D) gain are set to be −168, −800, and −8.8, respectively. Note that the negative sign of the PID gains is from the definition of the tracking error.
The exact parameters are listed as follows:
,
,
,
,
,
,
,
,
,
, and
. The nominal parameters which are used for the PID control design are set to be around
of the exact parameters. The corresponding reference equivalent parameters are displayed in
Table 1.
In regard to wheel encoder quantization, the resolution 60,000 counts per revolution is made. Thus, the resulting measurement quantization error is . On the other hand, the standard deviation of the noise for pitch angle and its angular velocity are 0.5 degrees and 0.5 degrees/s, respectively.
The following are the comparison of simulation results between the true parameters and the identified parameters under the condition: time constants and , the initial conditions are applied for all the following simulations.
Table 1 summarizes the performance comparison of the SPI between the direct numerical differentiation method and the proposed output filtering method. The results clearly illustrate that the proposed SPI method is able to provide a better accuracy as expected.
Moreover, as analyzed in [
21], different excitation of the input commands has a significant impact on the observation matrix
. The simpler the command is, the more likely that the condition number of
would become bigger. In other words,
is likely to be ill-conditioned. On the contrary, the more active the input command is, the more probable that the matrix
is well-conditioned. Therefore, in this paper, a simple as well as an aggressive command are applied. To note, the simple command input is a sinewave while the aggressive command is the combination of several sine and cosine waves with different frequencies and amplitude. To put it clearly, the simple command is designed as
, and the aggressive command is designed as
.
For the system identification of unstable systems, it is it is essential to begin by designing a controller and performing preliminary parameter tuning to ensure the stability of the closed-loop system. However, overly simplistic reference commands may not fully excite all aspects of the system’s behavior. By employing an aggressive command as a reference command to excite the system’s response, the controlled loop generates a control input signal to achieve the desired dynamic response of the system as close as possible. Subsequently, system parameter identification is conducted utilizing the closed-loop control input signal and historical data of system outputs.
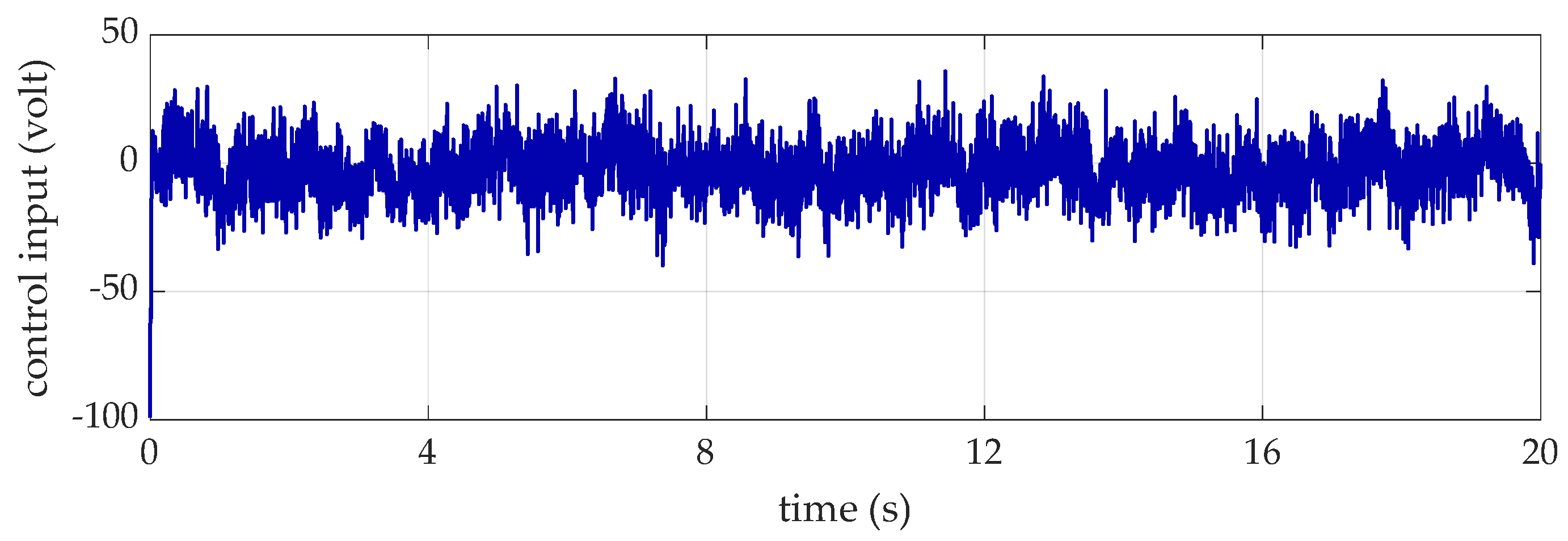
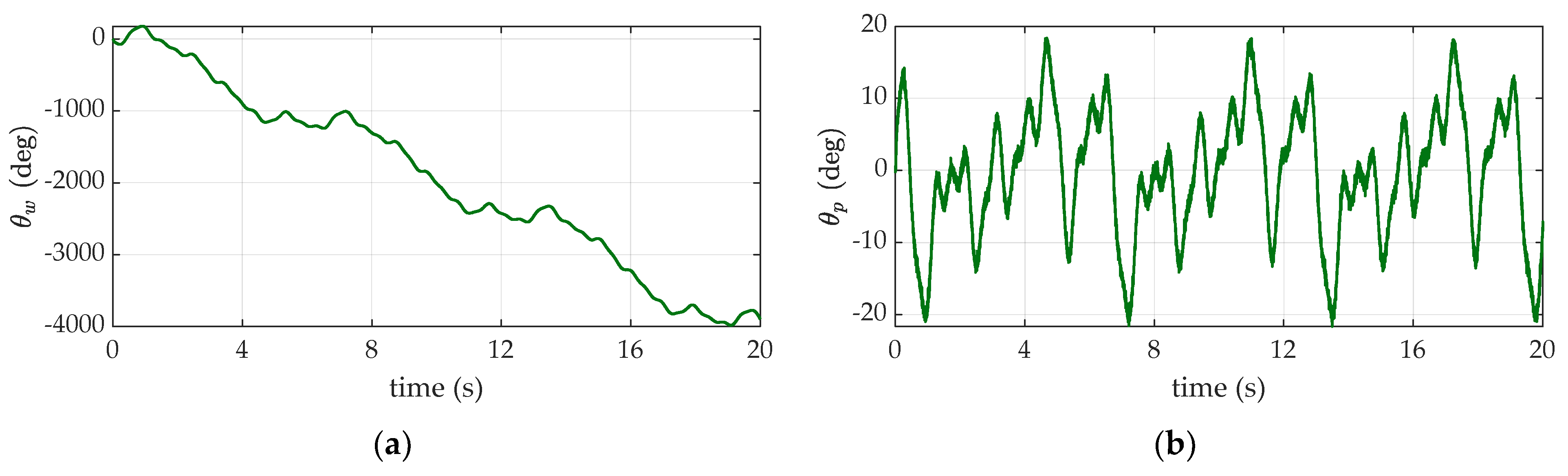
Figure 2 illustrates the input signals used for closed-loop parameter identification under aggressive command excitation, while
Figure 3 displays the corresponding system output responses. Apparently, due to the imperfection of the sensors, the input/output signals are contaminated by measurement noise. Therefore, the filter-based method becomes very important for noise suppression during the SPI, which has been highlighted in
Table 1.
According to
Table 2, it is obvious that the parameters identified through the aggressive command are more accurate than the simple command. The results verify the assumption as mentioned before. In other words, an active command can excite wheel-driven pendulum cart’s dynamic response more obviously than just a simple command. Note that the selection of the filter time constants should not filter out the original system’s dynamic response, but should be able to suppress the measurement noise.
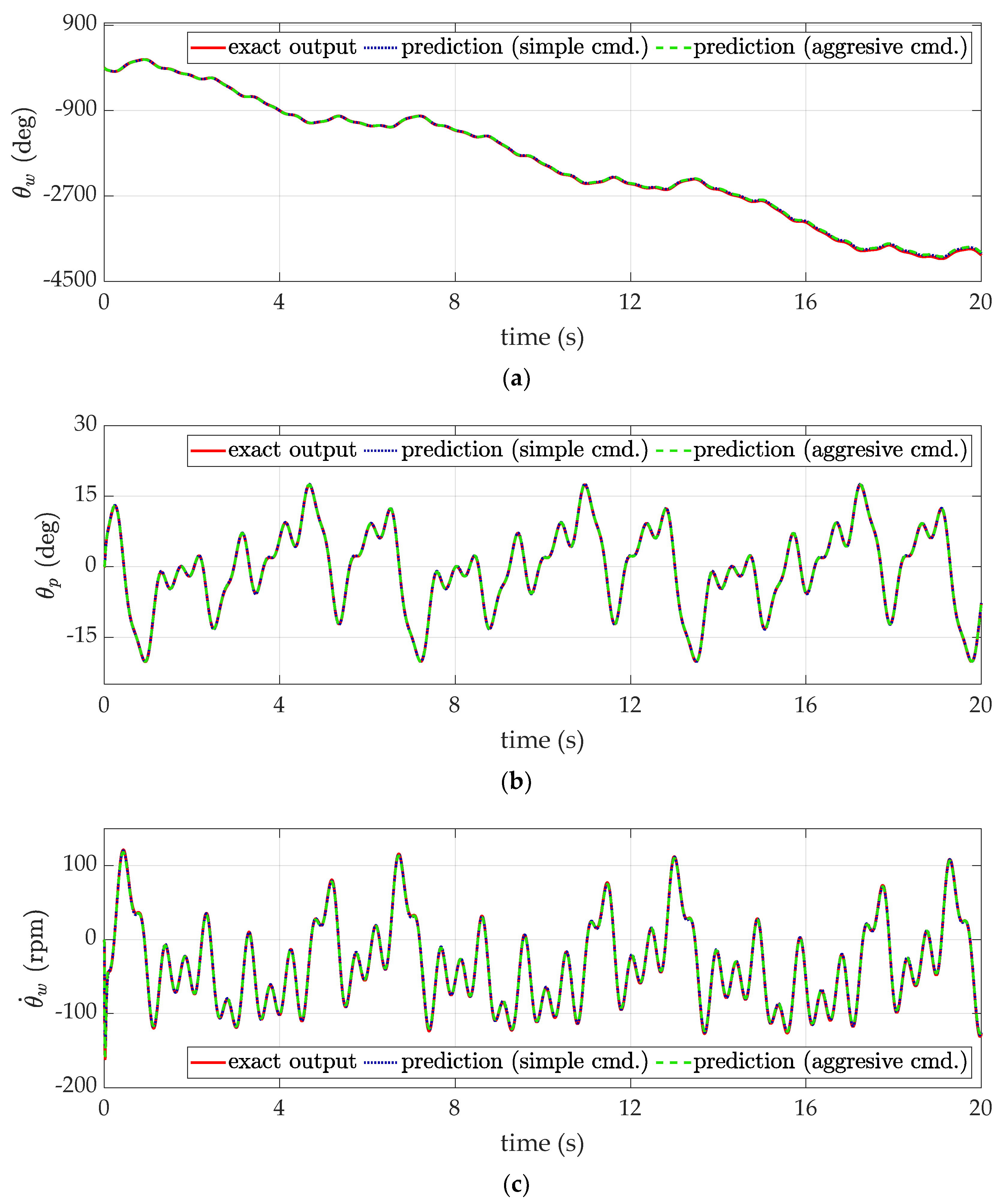
Based on the identified parameters,
Figure 4 demonstrate the association output predictions. The red line represents the exact output response from true parameters. As for the blue and green line, the former stands for the prediction of parameters identified through simple command, while the latter is the prediction of parameters identified through aggressive command. One can observe that, from
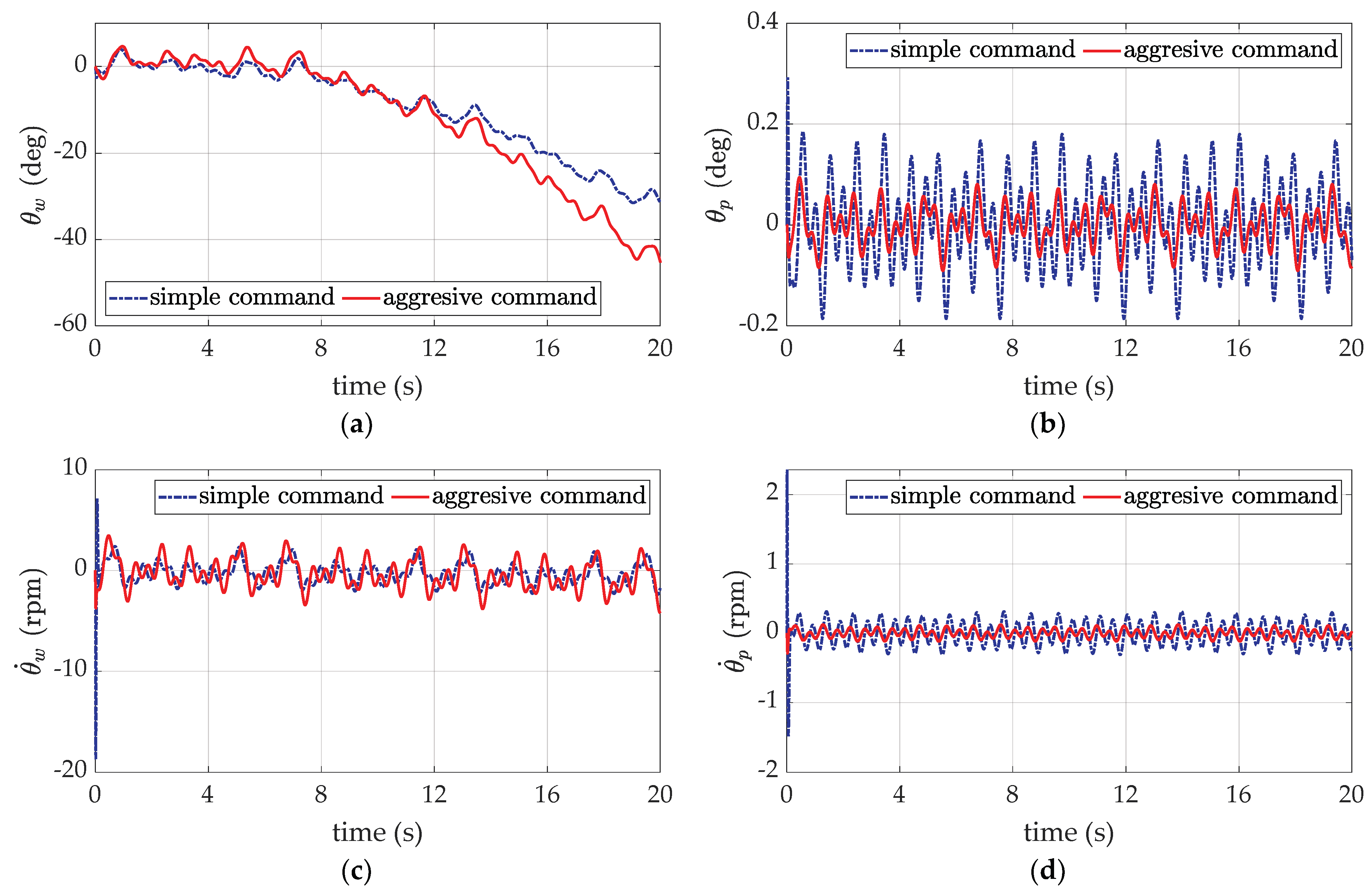
Figure 5, the RMSE (Root Mean Square Error) of the output prediction based on applying the identified parameters is very small. According to the simulation results, the RMSE for wheel angle output prediction is 0.3260 for the aggressive command and 0.2423 for the simple command, respectively. Besides, the RMSE for pitch angle output prediction is 6.8181e-04 for the aggressive command and 0.0016 for the simple command. Also, the RMSE for wheel angular rate output prediction is 0.1585 for the aggressive command and 0.1267 for the simple command. Lastly, the RMSE for pitch angular rate output prediction is 0.0064 for the aggressive command and 0.0201 for the simple command.
It is evident that states related to pitch, including pitch angle and pitch angular rate, exhibit lower output prediction errors when excited through an aggressive command compared to those excited by a simple command. In contrast, states associated with the wheel, although not showing significantly lower output prediction errors when excited through an aggressive command than when excited through a simple command, display very similar errors between the two cases.
This phenomenon can be attributed to the fact that the response of parameters identified through an aggressive command is superior to that of parameters identified through a simple command. The rationale behind this lies in the active command input’s capability to reduce the condition number of the observation matrix for the wheel-driven pendulum system. This reduction prevents the system from becoming ill-conditioned and thereby enhances the accuracy of parameter identification.
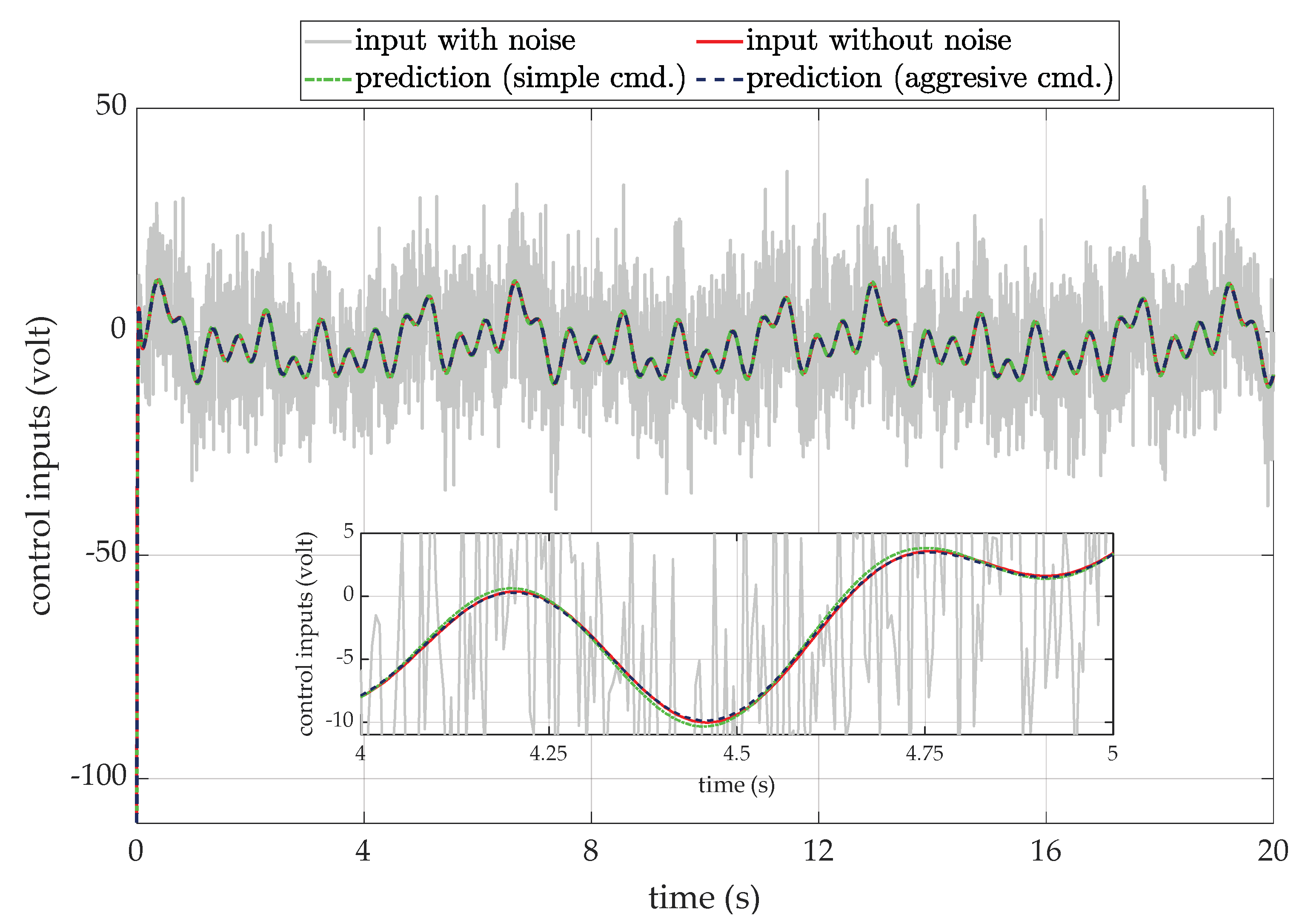
In the context of closed-loop system identification, the performance of system identification can be evaluated not only through the prediction of output responses but also by calculating the corresponding control inputs using the controller, thereby enabling control input predictions. Based on the results of closed-loop system identification,
Figure 6 presents predictions of control inputs, comparing these predictions with both the measured and exact control inputs.
In
Figure 6, the gray line represents the control input signal of the actual system with output measurement noise, the red line corresponds to the exact control input signal, while the green and blue lines represent the predicted control inputs obtained through the excitation of an simple command and an aggressive command, respectively. It is evident from the graph that the accuracy of control input prediction is influenced by the accuracy of pitch angle prediction, as control inputs are derived from the error between the reference command and the pitch angle. Consequently, the predictions generated through aggressive command excitation exhibit higher accuracy compared to those obtained through simple command excitation when compared to the exact control inputs.
When applying an output filtering method, it is necessary to perform numerical integration for specific system states as shown in (41), where the associated initial values for the integration is provided by (42). Consequently, any uncertainty in the initial value leading to bias results in the accumulation of errors in the system state over time, affecting the accuracy of the system state integration solution and, consequently, reducing the precision of parameter identification. Based on (42), it is evident that increasing the values of the filter parameters
and
can mitigate the impact of initial value uncertainty on numerical integration. To validate this statement, extra simulations are conducted to evaluate the accuracy of parameter identification under different cases. In order to clearly point out how the selection of the parameters
and
can affect the precision of the SPI, the following numerical cases are applied in the absence of output measurement noise. The results are summarized in
Table 3.
In this simulation comparison study, the controller parameters and initial system settings remain consistent with the previous simulations. As mentioned previously, the maximum system frequency of unstable systems is typically challenging to estimate beforehand. Therefore, the easiest way for the design of the filter parameters
is based on the system’s reference commands, see [
10,
11,
18]. In Case A, serving as the ground truth, there is no initial value bias. Considering a cutoff frequency of the output filter that is 10 times the maximum reference command frequency, the filter parameters are designed with
. In Case B, using the same filter parameters, the initial value uncertainty introduced by the IMU-based estimation of pitch angle is accounted for. Here, the initial value of the pitch angle bias is set to be with positive 0.5 degrees. Furthermore, to mitigate the effects of initial value uncertainty and assess the impact of increased filter parameters, we further conduct Case C, where filter parameters are adjusted to
. To further discuss an inadequate selection of the parameters degrade the SPI precision, the Case D, where filter parameters are increased to
, is demonstrated while keeping the same level of initial value uncertainty bias.
From
Table 3, it can be observed that, as the ground truth in Case A, since there is no noise interference or initial value uncertainty, the filter-based SPI results in very low parameter estimation errors. However, under the influence of initial value bias in Case B, the accuracy of parameter identification is indeed affected, with some parameter estimation errors reaching up to 95%. To address the SPI error caused by initial value uncertainty, as shown in Case C, appropriately increasing the filter parameter values can effectively mitigate the impact of initial value uncertainty and reduce parameter estimation errors. Nevertheless, it should be emphasized that the filter parameter values cannot be infinitely increased, as previously discussed in the article. The concept of output filtering is based on the removal of noise from output data, and the physical significance of filter parameters is the cutoff frequency of the filter. Therefore, excessive increases in filter parameters may suppress the system’s dominant frequency response, making the original system behavior unobservable, which in turn decreases the accuracy of parameter estimation, as demonstrated in Case D.
In summary, when using the output filtering methods, the selection of the filter parameters carries significant implications. For unstable systems, under the condition of meeting basic tracking requirements, filter parameter design can be based on the maximum frequency of reference commands in the closed-loop control. The adjustment of filter parameters should not solely focus on noise removal, but should also consider the suppression of uncertainties in system initial value measurements.
Based on the above simulations, we can firmly conclude that the use of filtering-based system parameter identification can be applied to the nonlinear and unstable wheel-driven pendulum system successfully; the second-order output filtering method does not require the use of noisy acceleration signals, thus enabling more accurate parameter estimation; the filtering method is able to suppress the effects of Gaussian noise and quantization noise effectively; incorporation of aggressive command input can enhance the precision of parameter estimation.
Remark 1. In the process of system identification, unstable systems may lead to adverse experimental outcomes or even pose safety hazards. Therefore, utilizing closed-loop system identification not only ensures the stability during the SPI but also effectively estimates the parameters of unstable systems, subsequently reducing system uncertainties in later stages of control design. Furthermore, employing unstable systems for closed-loop model estimation as an application of digital twins holds significant value. Given the unique physical characteristics of unstable systems, arbitrary adjustments to system controller parameters may result in system divergence, or even more severe consequences such as system damage. Leveraging the concept of a digital twin, designers can perform preliminary assessments of physical systems within a virtual model and proceed with controller design. Through simulations, they can evaluate the expected performance of the controller, thus verifying the feasibility and effectiveness of the controller design. Ultimately, these designs can be applied to real-world systems, ensuring a safer and more reliable development of controllers prior to implementation and optimization.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}