1. Introduction
Hydropower is one of the traditional energy sources that has demonstrated the unique advantages of adapting to contemporary low-carbon emission goals. At the same time, accelerating the penetration of new energy is a significant and imperative pathway all over the world [
1]. In this context, integrating renewable energy into hydropower plants becomes an inevitable trend. However, there is a compelling oscillation problem called ultra-low-frequency oscillations (ULFOs). Actually, ULFOs have been successively recorded early in the US Northwest Pacific system, the Canada BC Hydro-Bureau, and the Colombia Power Grid [
2,
3,
4]. In recent years, this problem has attracted more and more attention because it emerged in both the Yunnan Power Grid in 2012 and the Southwest Power Grid in China in 2016, the common feature of which is that the operating condition is asynchronous, interconnecting through back-to-back high-voltage DC transmission systems [
5,
6].
Unlikely commonly known low-frequency oscillations (LFOs) with oscillation frequencies between 0.1 and 2.5 Hz [
7], ULFOs usually oscillate below 0.1 Hz, which means the oscillation period is greater than 10 s [
8]. Moreover, the individual reflection is that the frequency would oscillate and last for over half an hour. This imposes enormous challenges on the stable operation of hydro-dominant power systems. Emerging research has been conducted, focusing on the causes and mitigation of ULFO, and some valuable conclusions have been summarized.
For the causes and main factors, the negative damping analysis of hydropower units is found to be the fundamental cause [
9]. The complex torque coefficients (CTCs) are deduced to compare the damping of 0–2.5 Hz, and the turbine governor is found to be responsible for ULFOs [
10]. To find out the specific factors, reference [
11] investigates the governing system’s parameters. It seems that the proportional and integral coefficients of the PID controller and water starting time determine the damping level of the power system together. Meanwhile, reference [
12] obtains similar conclusions based on trajectory eigenvalue (TE) theory [
13], which can indicate the oscillation frequency and damping ratio. The TE results also prove both the strength of the system connection and thermal-hydropower proportion and are also crucial to affect the oscillation mode [
14]. Reference [
15] studies the detailed influence of water diversion system topologies and operation scenarios by phase diagrams. Additionally, an interesting discovery is the amplitude of ULFOs had a clear yearly cycle in the Nordic power system over seven years, 2015–2021 [
16]. Then, both the cause and factors are verified by an experimental investigation [
17]. Obviously, most of the research concerns solely hydropower systems. What is even more thought provoking is that the integration with renewable energy is neglected, but the more remarkable frequency risks of the hydro-wind power system are foreseeable.
According to the cause of ULFO, the corresponding control methods can be designed for oscillation elimination. Basically, there are three types of control methods. The first is to re-tune the PI parameters of the governor properly [
18]. For example, robust fixed order control can be designed [
19]. To make up for this flaw, some intelligence algorithms, such as ant colony and deep learning algorithms, are applied to ensure the effectiveness of the optimized PID parameters for various extreme operating conditions [
6,
20]. But, the negative impact is that it may weaken the performance of the governor [
21]. The second control method designing is an additional damping controller, where the power system stabilizer (PSS) or governor’s PSS (GPSS) can be developed. Multi-band PSS can be used for either LFO or ULFO suppressions [
22]. Additionally, the GPSS can also be configured on the governor to mitigate the negative damping effect [
23]. The methods mentioned before involve governor modification in hydropower plants, which are challenging to conduct. The third method uses electronic devices to suppress ULFO. Since the HVDC system is crucial for asynchronous networking, it is rational to take advantage of control abilities, such as a frequency limiting controller (FLC) [
24] or a damping controller [
25].
However, such studies have not considered more and more renewable energy integration in the modern power system [
26]. The mechanism of wind power penetrating to hydro-dominant has not been revealed. Wind power has a significant impact on ULFOs because the inertia will be decreased by the renewable power and the inertia has a huge influence on frequency regulation [
27]. On the other side, to decrease the risk of ULFO, the common control method is to apply smaller governor PID parameters, but this weakens the primary frequency control ability. In such a situation, the frequency characteristics will be more complicated. At the same time, compared to physical and mechanical controllers on hydro units, the power electronic devices have the advantage of fast and flexible adjustment ability, which provides opportunities for ULFO control when wind power is integrated [
28].
It can be found that renewable wind power’s impact on ULFO is lacking, and there is a need for additional control methods to compensate for the weak frequency control ability. To find the evolution mechanism of ULFO with wind power integration, as well as for the sake of satisfactory control strategy, the contribution of this paper is conducted in two aspects:
- (1)
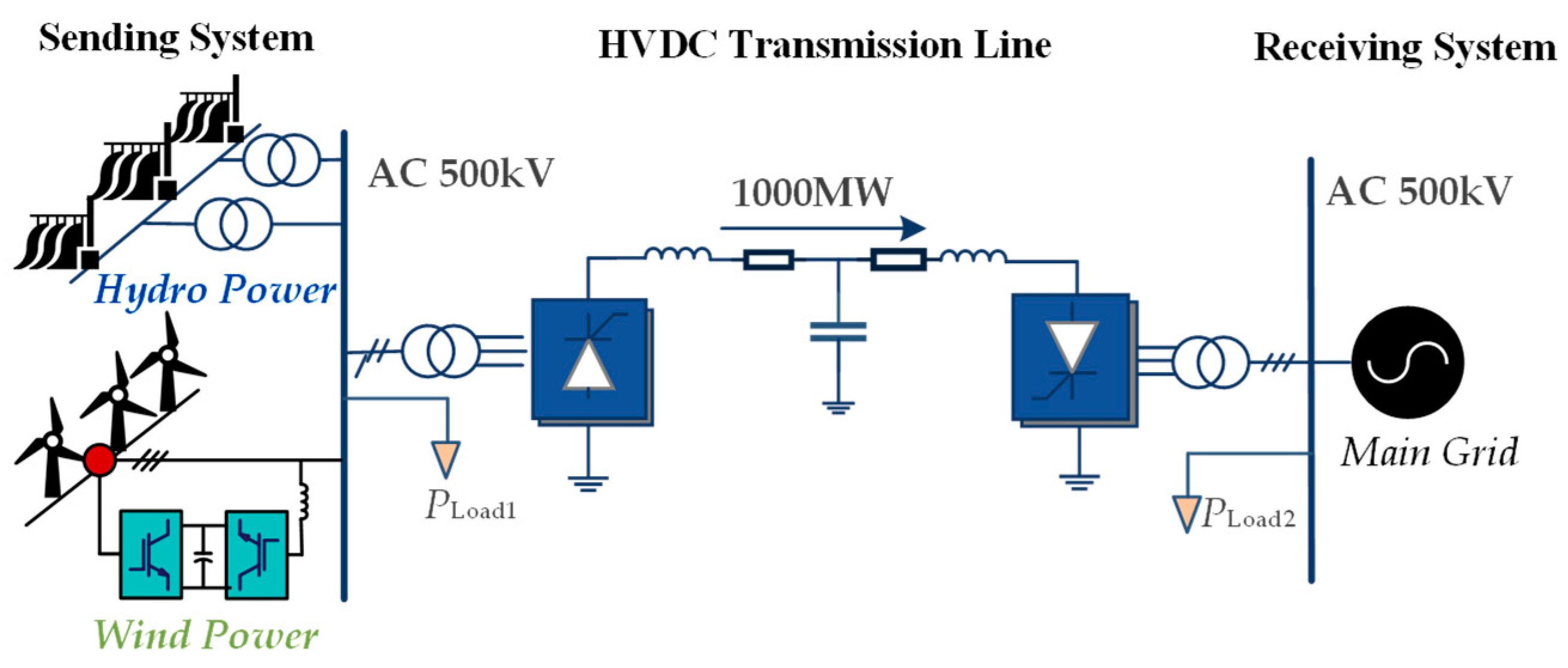
The occurrence scenarios of ULFOs are developed by considering wind power integration. Thus, based on the mechanism of ULFOs in asynchronous hydropower systems, the influence of wind power generators on frequency oscillation is innovatively investigated, and some determined factors are defined, which makes it clearer to deal with the consumption of sustainable wind energy.
- (2)
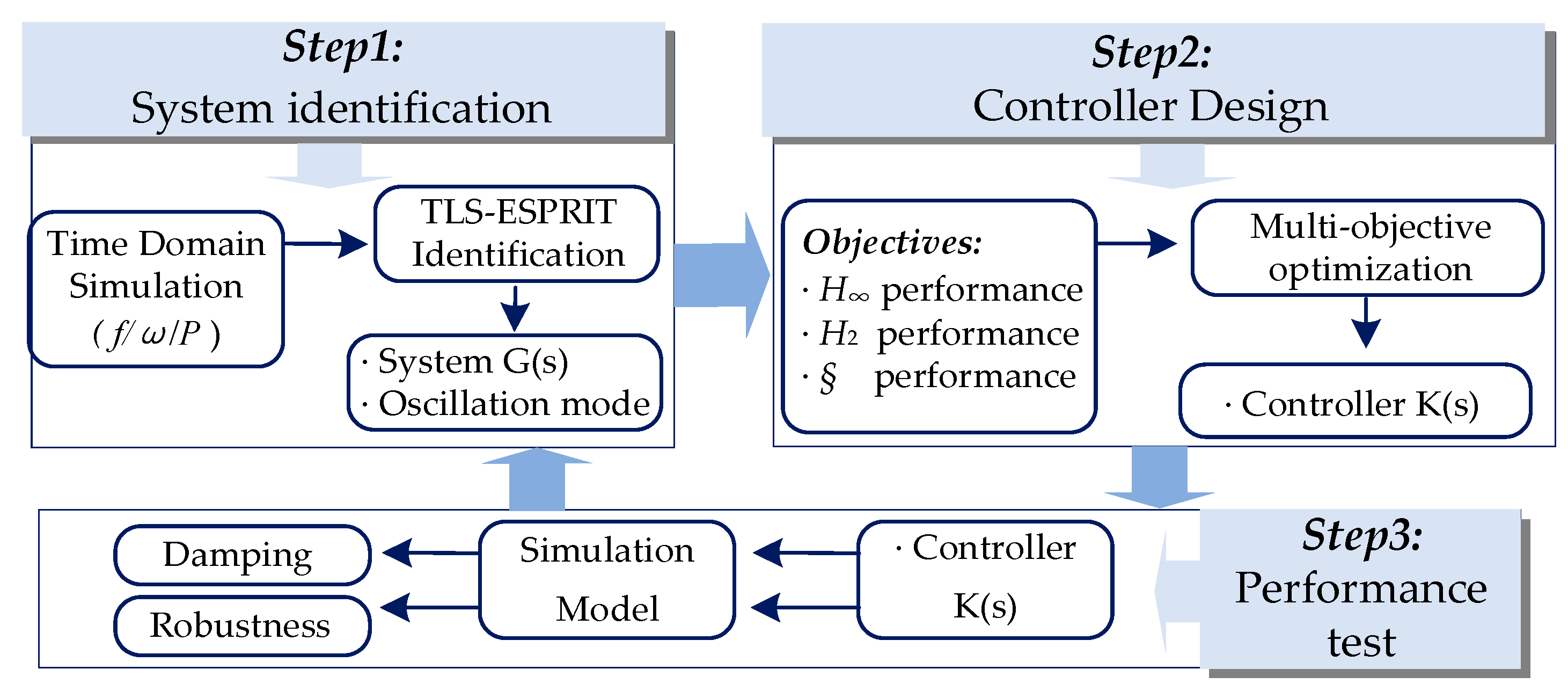
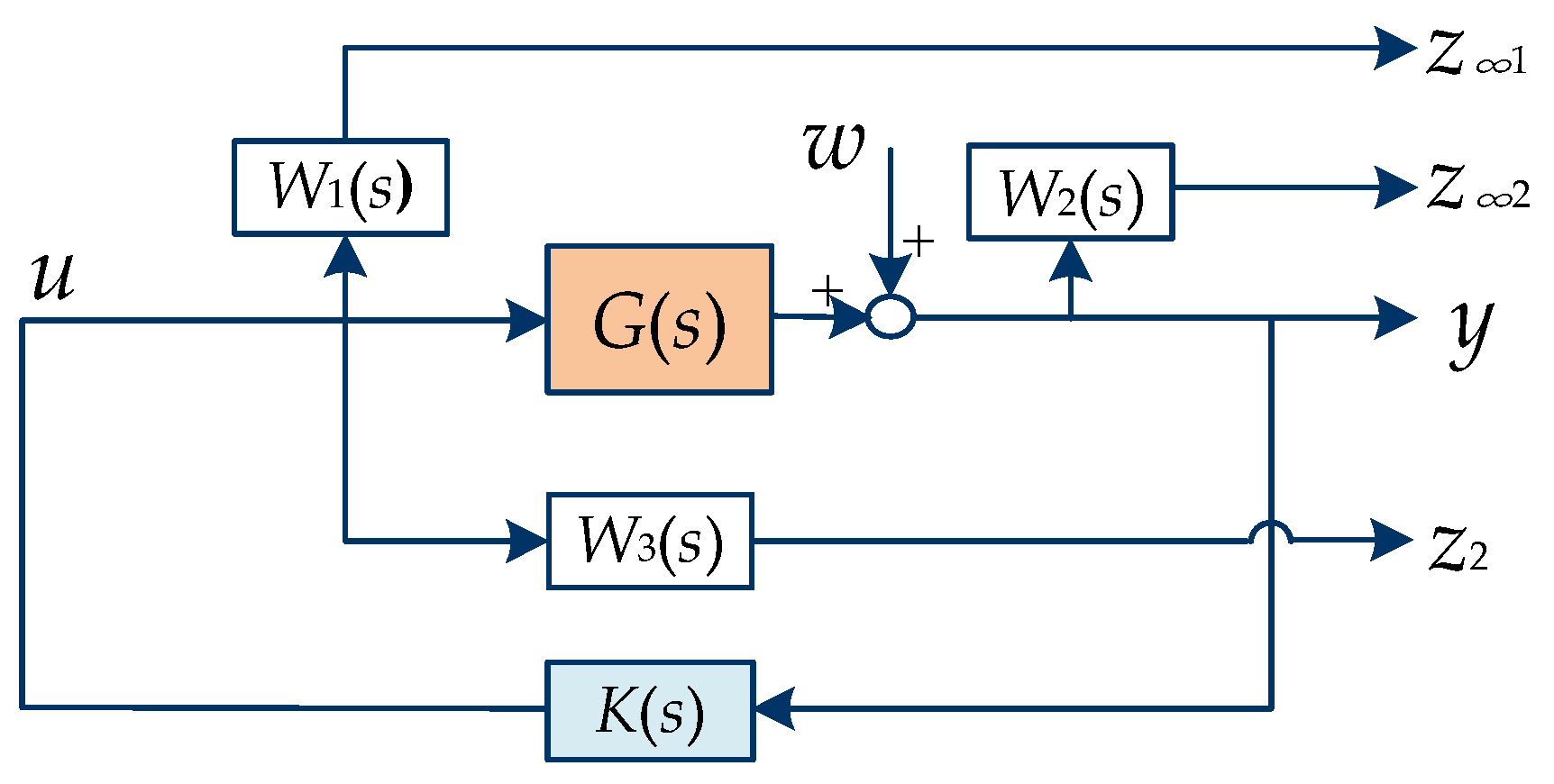
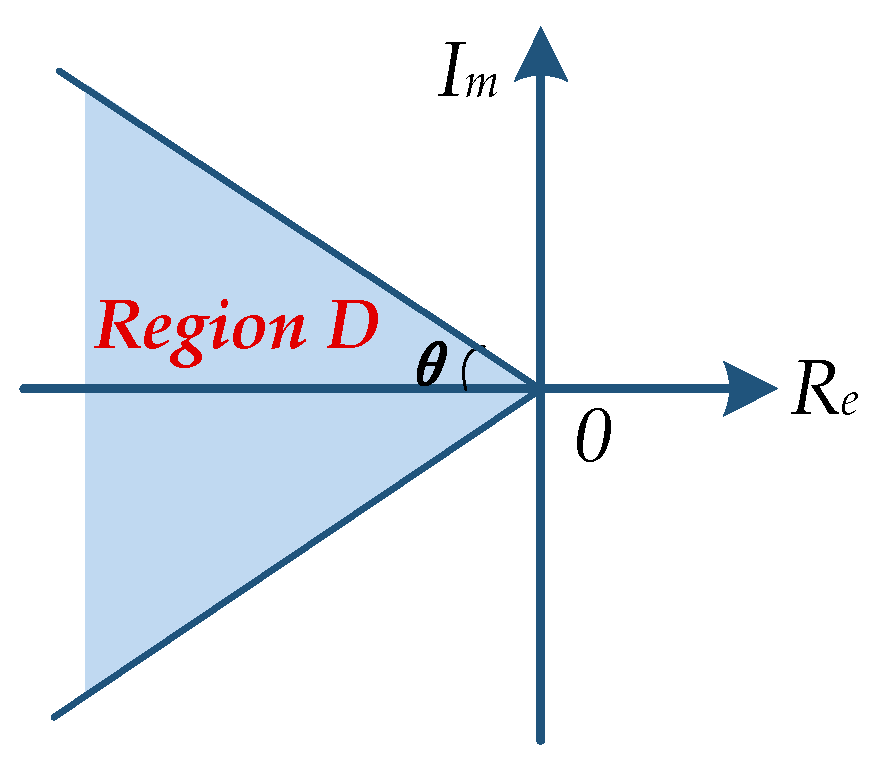
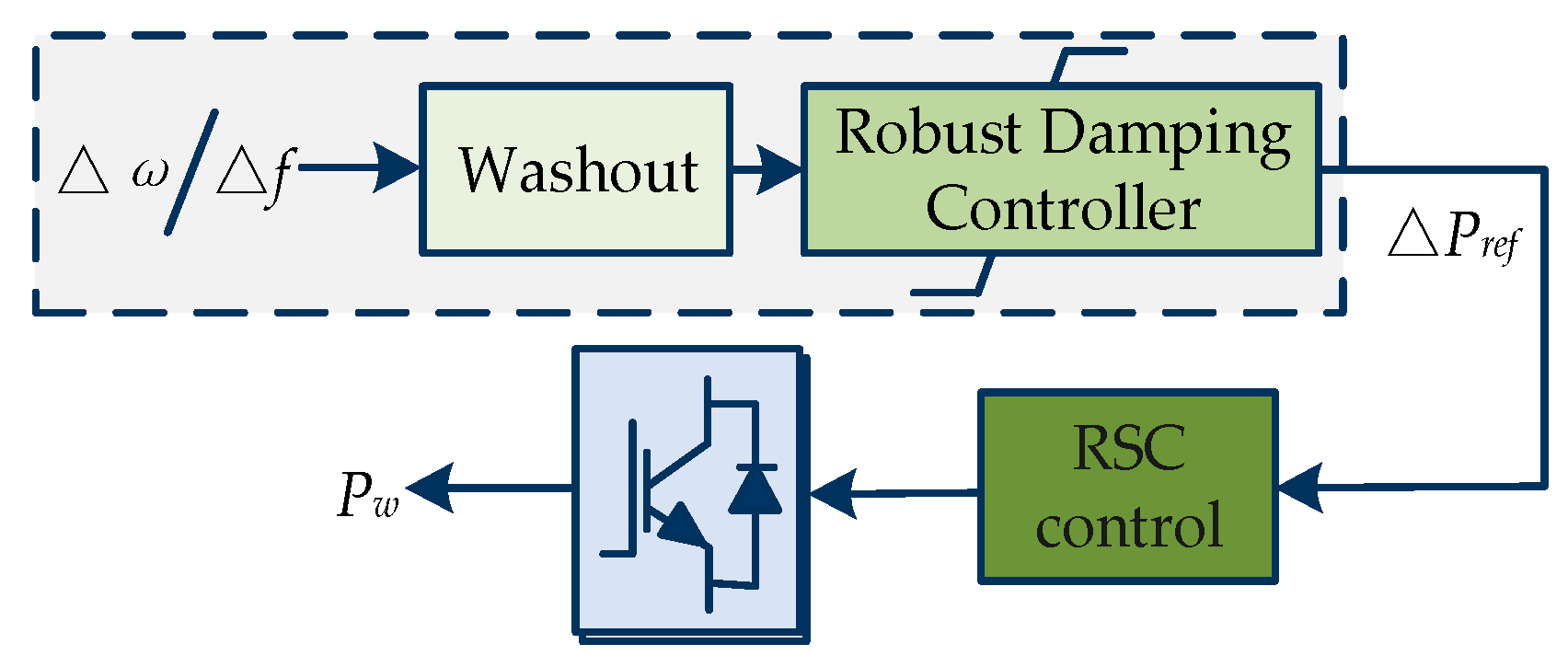
The control method is proposed based on wind power to suppress ULFOs. First, the identification algorithm is utilized to obtain the model of the power system. Then, the additional damping control based on mixed H2/H∞ robust control theory is proposed to strengthen the damping of the sending system. Subsequently, both frequency response performance and frequency oscillation suppression ability can be guaranteed, and this is significant for promoting the stable operation of a low-carbon energy base.
The organization of this paper is as follows.
Section 2 establishes a basic mathematical model of the hydropower sending system, and the damping torque is obtained to reveal the mechanism of ULFOs.
Section 3 investigates the influence of wind power integration on ULFOs, and the main parameters are defined.
Section 4 proposes a coordinated control method of wind power to improve the frequency stability and suppress ULFOs of the sending system. The simulations are conducted to verify the effectiveness of the research in
Section 5. Finally,
Section 6 concludes this paper.
2. The Mechanism of Ultra-Low-Frequency Oscillation
This section introduces the mechanism of ULFO of hydropower based on damping torque theory, and the key factors influencing the oscillation mode are studied.
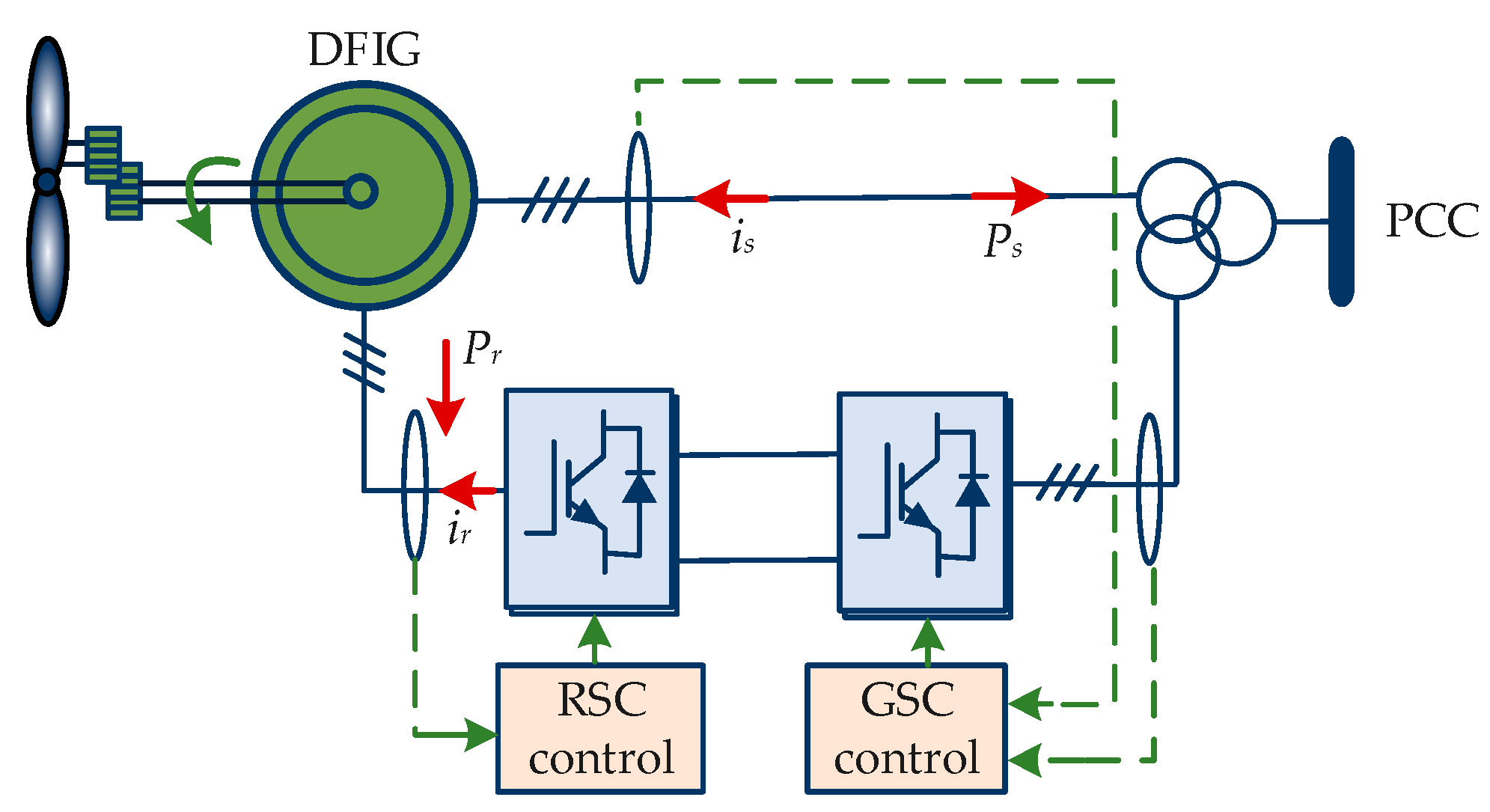
2.1. The Hydropower Generator Model
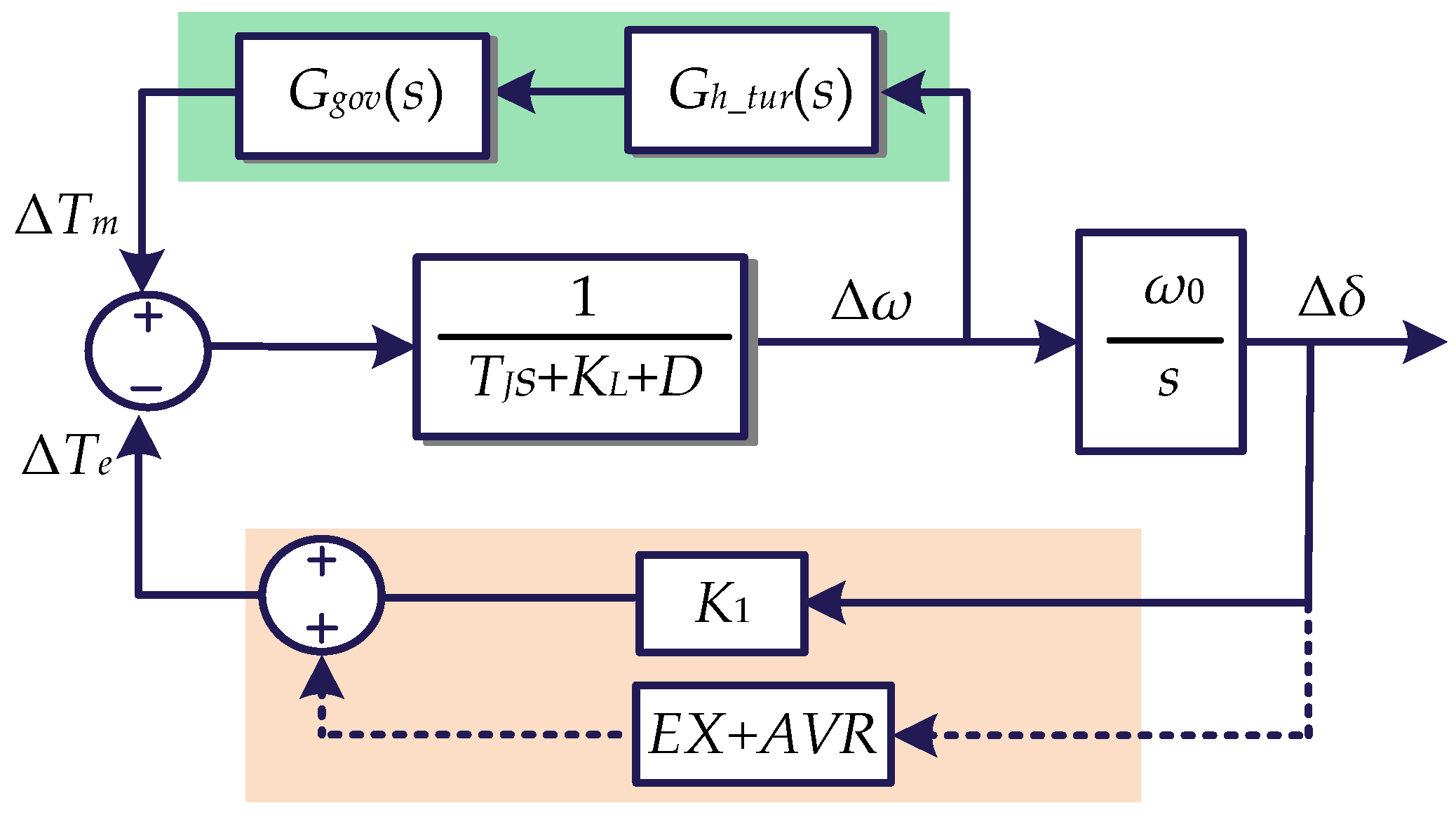
The basic Philips–Heffron model of a hydropower generator is given in
Figure 1. There are two parts to determine the output power of the hydro unit, where the mechanical power deviation △
Tm is determined by the water turbine and governor in green background and the electromagnetic power deviation △
Te is determined by the synchronous generator and excitation loop in orange background. There is
Pe =
ωTe. Note that the traditional LFO belongs to the active power fluctuation of either the local mode or inter-area mode. However, recent research results prove that ULFO is a kind of frequency stability problem [
20]. This means that a simplified way to analyze ULFO focuses more attention on the mechanical part marked green in
Figure 1, and the key elements are the hydro turbine and governor. Moreover, compared to the single machine with an infinite bus system (SMIB) for LFO analysis, the effect of load
KL is considered significant. Therefore, the dashed lines simplify some of the transfer functions.
The mathematical model can be expressed as:
where Δ represents the deviation of variables,
ω is the rotor speed,
δ is the power angle,
TJ and
D are the inertia time constant and damping coefficient of the generator, respectively, and
Ggov and
Gh_tur express the transfer functions of the turbine and governor, respectively.
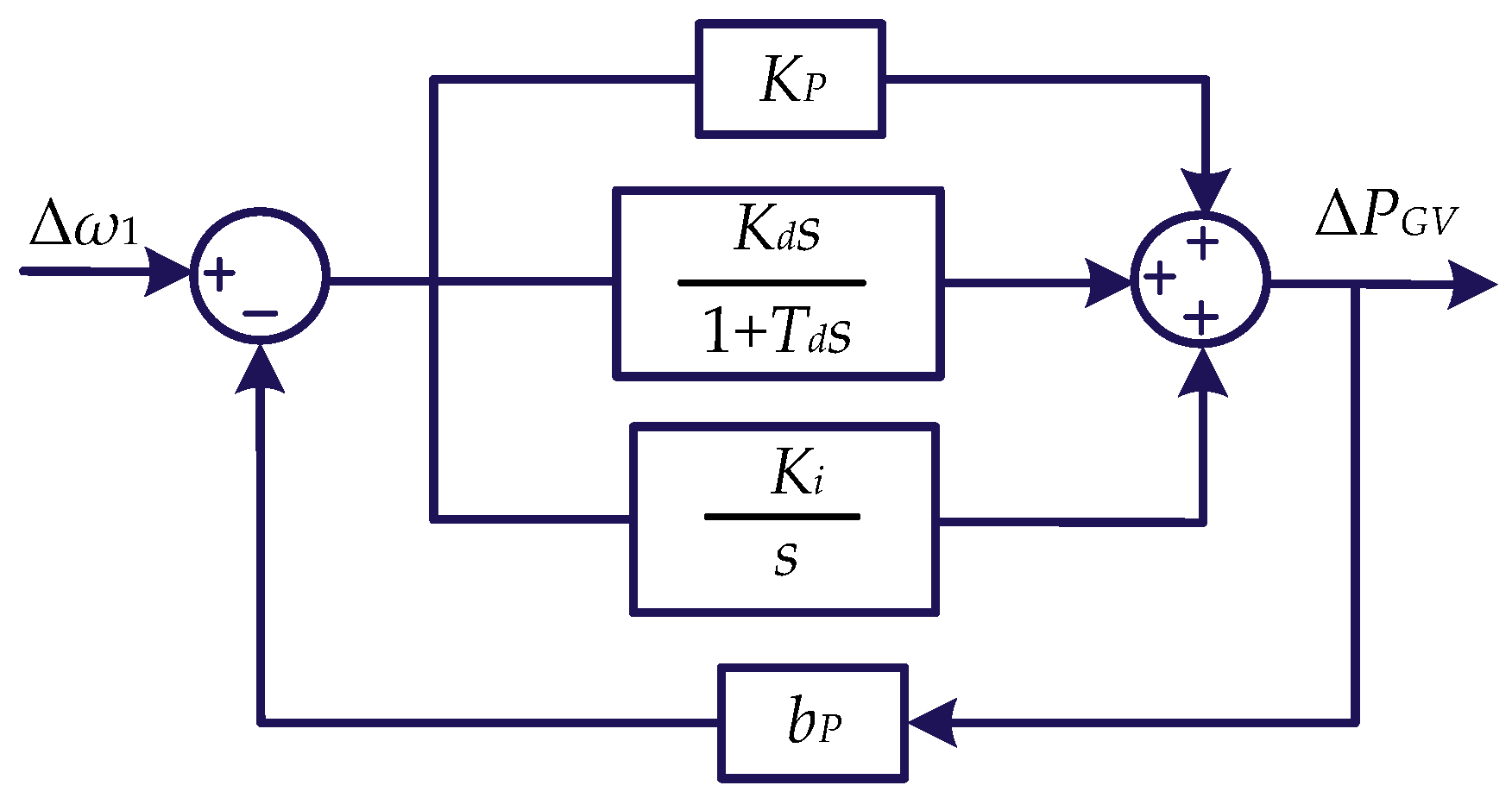
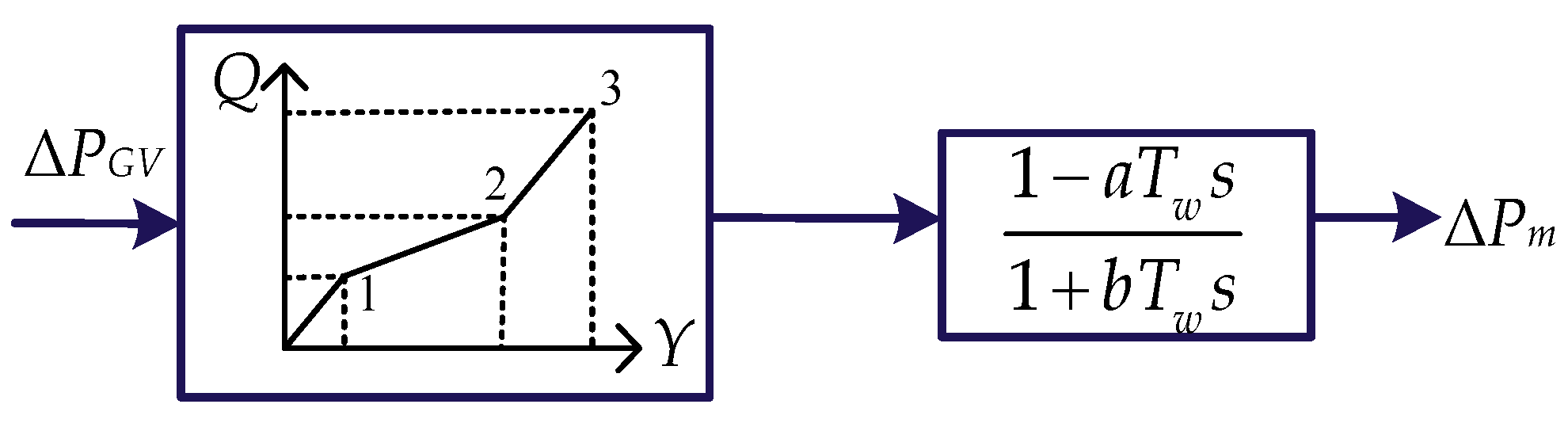
Specifically, the control structures of the hydro turbine and PID governor are depicted in
Figure 2 and
Figure 3.
Where KP, Ki, and Kd are the proportional, integral, and differential coefficients of the PID governor, bp is the permanent slip coefficient, and PGV is the output of the governor. For hydro turbines, Tw is the water starting time, which can comprehensively reflect the operating condition and is related to the head and discharge of the hydropower unit. Generally, a = 1, b = 0.5.
2.2. The Damping Torque of the Hydropower Unit
The complex torque coefficient method is constantly used to effectively analyze oscillation problems owing to the priority to observe the damping characteristics of multi-bandwidth frequencies visually.
Based on the diagrams in
Figure 2 and
Figure 3, the transfer functions of the governor and the hydraulic turbine can be presented in (2) and (3).
It is important to point out that
Tw is regarded as one of the inner causes of ULFO because (3) indicates the hydropower unit is a non-minimum phase system, which is different from thermal power units [
13]. This may explain the high occurrence in hydro-dominated power systems.
According to
Figure 1, the transfer function of the Δ
ω→Δ
Tm loop can be obtained. Moreover, based on the complex torque coefficient method, the mechanical torque can be divided into synchronous torque coefficient
Ksm and damping torque coefficient
KDm, respectively.
KDm is related to the capability of the system to suppress oscillations.
Substituting
s = j
ω into
Ggen(
s), the damping torque
KDm can be denoted in (5):
where:
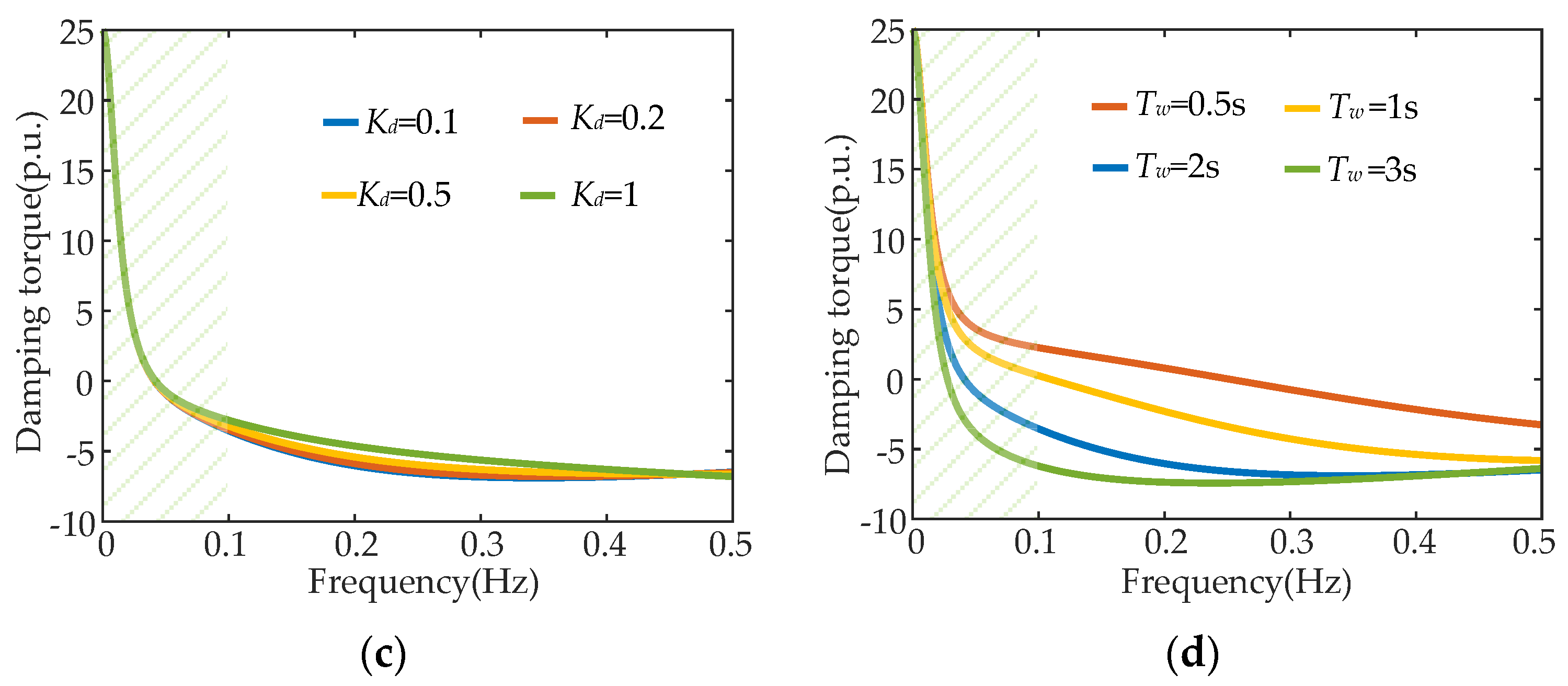
2.3. The Mechanism Analysis of ULFOs
To ensure the cause of ULFO and find the mechanism, the specific essential parameters of the hydropower generator, including
KP,
Ki,
Kd, and
Tw, are studied. Note that the values of
KP,
Ki, and
Kd refer to the adjustment range of the governor parameters in the actual hydropower plant. In fact,
Kd is set at a minimal value, such as 0.1 or even zero. In this paper, the analysis of
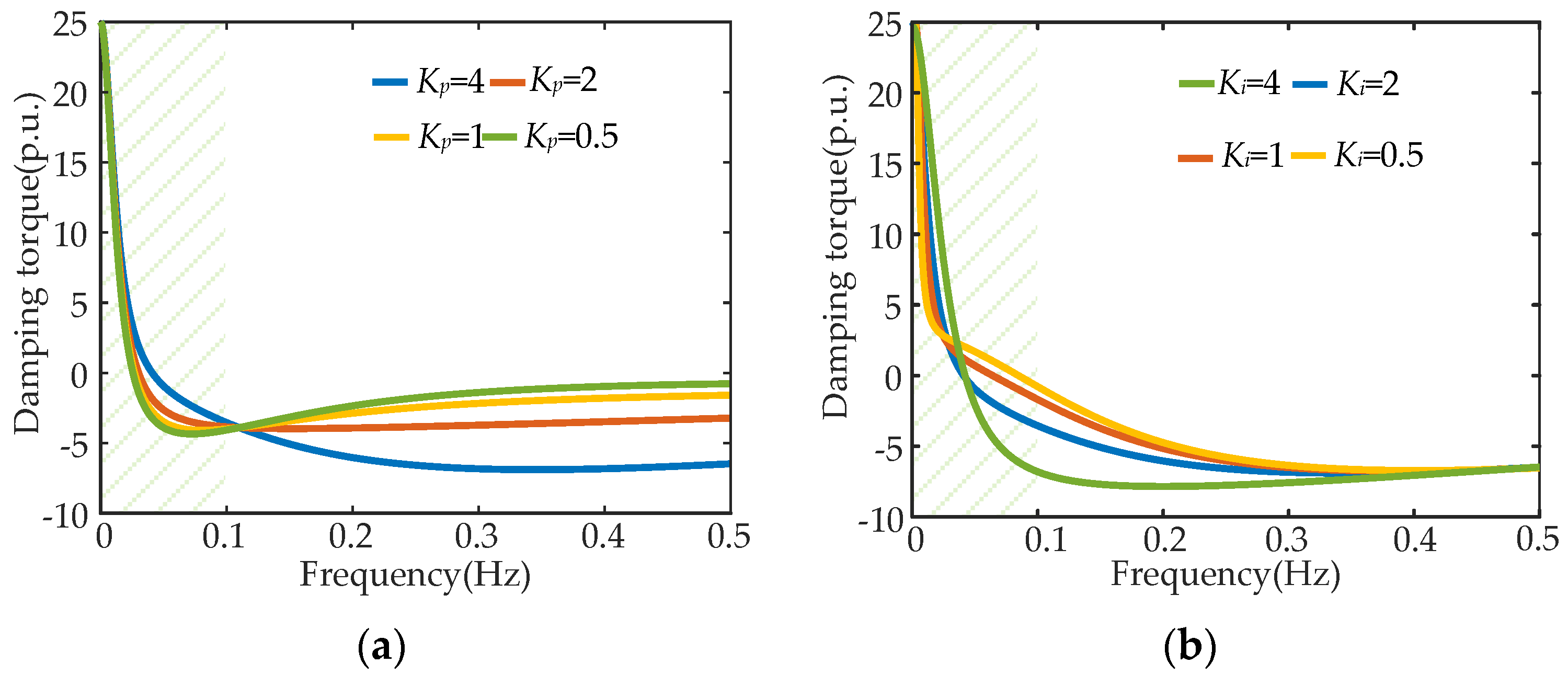
Kd is necessary to ensure the dominant influencing factor. The influence of these parameters on damping characteristics is presented in
Figure 4. The green background part is the ULFO area.
For the parameters of the PID governor, the influence of KP and Ki is more significant than Kd. The differential coefficient has little effect on both ultra-low-frequency and low-frequency bands. Increasing KP would provide a positive damping for ULFO, while a change in LFO is the opposite. The influence of Ki varies with the oscillation frequency of the system. In an ultra-low-frequency band, there is an intermediate frequency, and the changes in damping on both sides of this frequency are precisely opposite.
For the influence of the hydro turbine, the increases in Tw cause arresting negative damping. Therefore, it can be concluded that a larger water starting time or a long penstock a of hydropower generator would lead to the risk of ULFO in the system. Meanwhile, the improper PID parameter of the hydro governor would further worsen the damping, and the combination of these causes makes it easier to excite ULFO in a hydro-dominated sending system.

 ,
, 



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}