
Robust Wind Power Ramp Control Strategy Considering Wind Power Uncertainty
Abstract
:1. Introduction
- Considering the dual uncertainties of wind power and load demand, a two-stage robust optimization-based wind power ramp control framework is developed for multiple ramp control sources, such as conventional generators, electrochemical ESSs, and HSSs.
- A novel coordinated wind power ramp control strategy is proposed using the column-and-constraint generation (CC&G) algorithm. The proposed ramp control strategy can effectively handle the worse wind power ramp conditions with an enhanced economic performance by making extra profit in the hydrogen market.
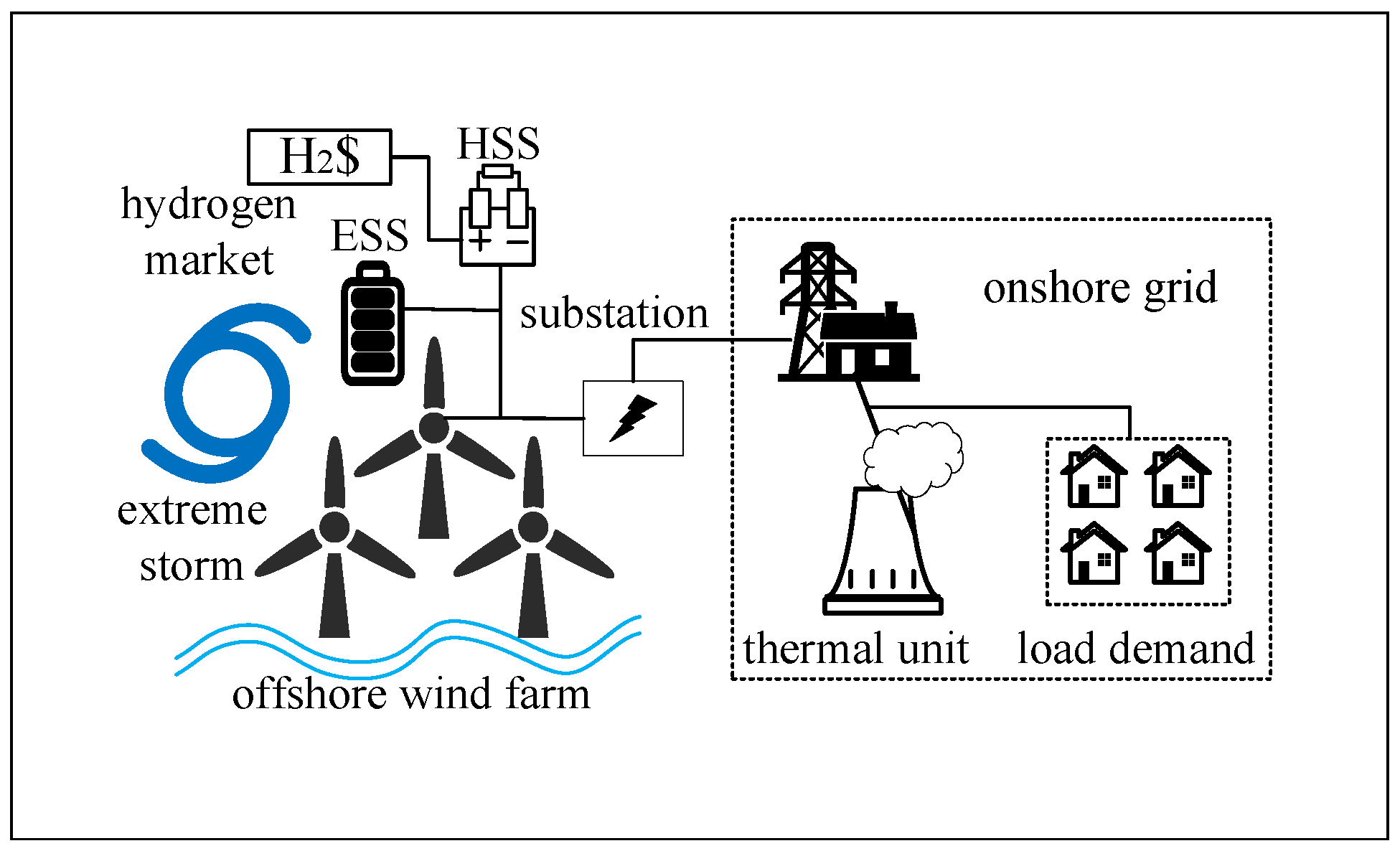
2. General Framework of Multi-Source Offshore Wind Power Ramp Control Considering Uncertainties
2.1. Wind Power Ramps and Impacts on Onshore Grid
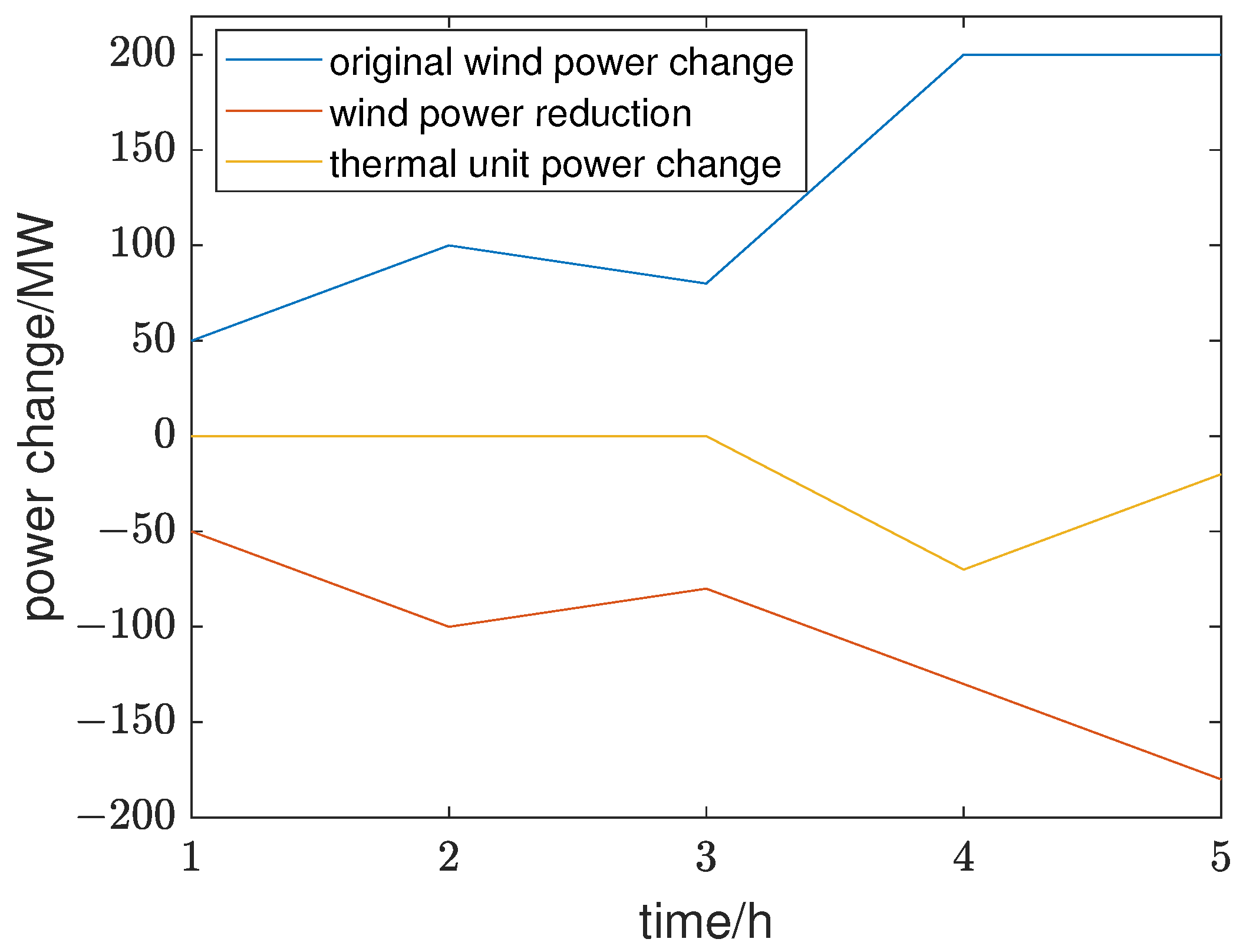
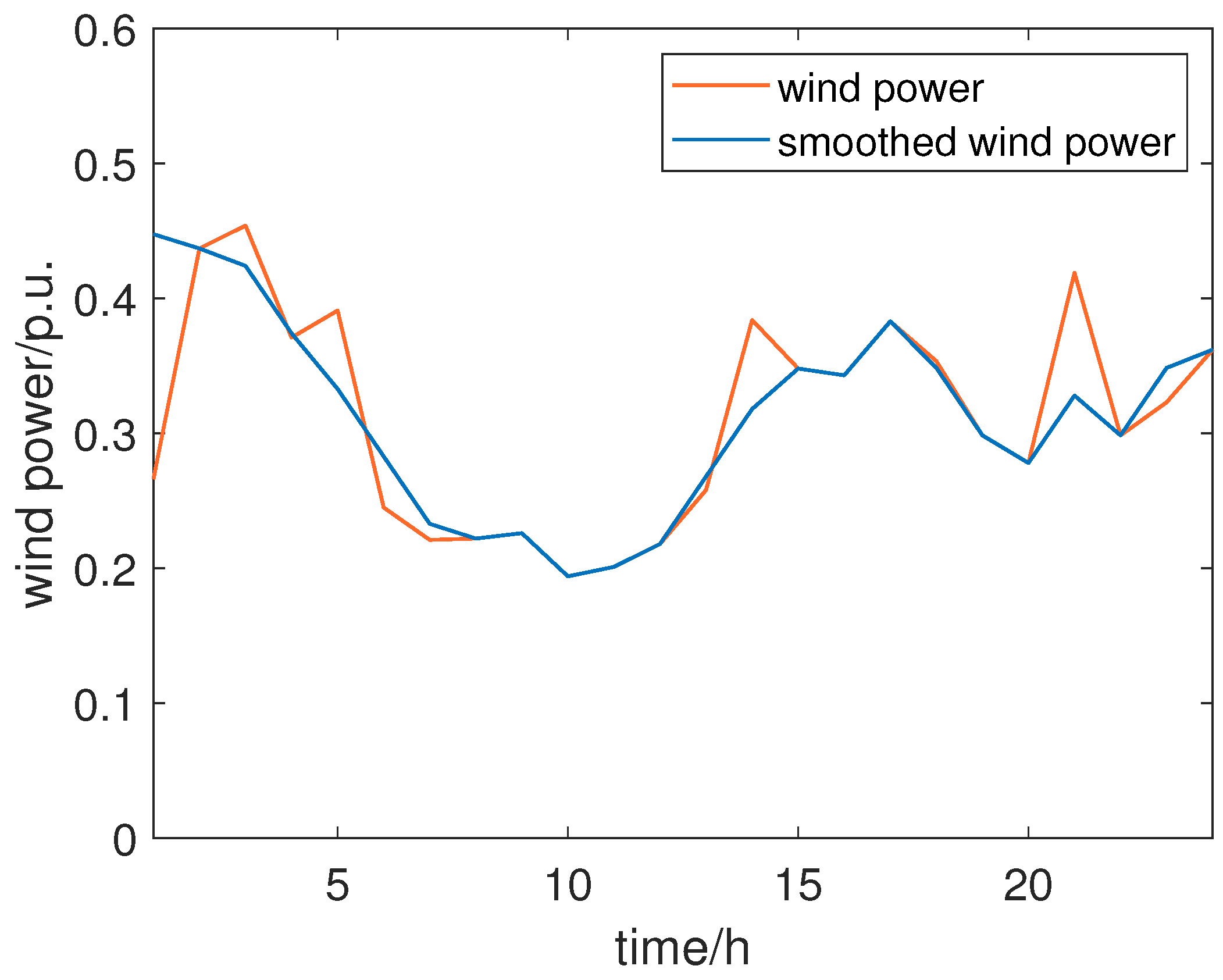
- Wind power ramp-down: when the wind speed v exceeds the cut-out speed over time , the wind turbines collectively shut down and result in a significant decrease in the output power of the wind farm. If the magnitude of the power variation exceeds the threshold [27,28], a wind power ramp down event occurs:
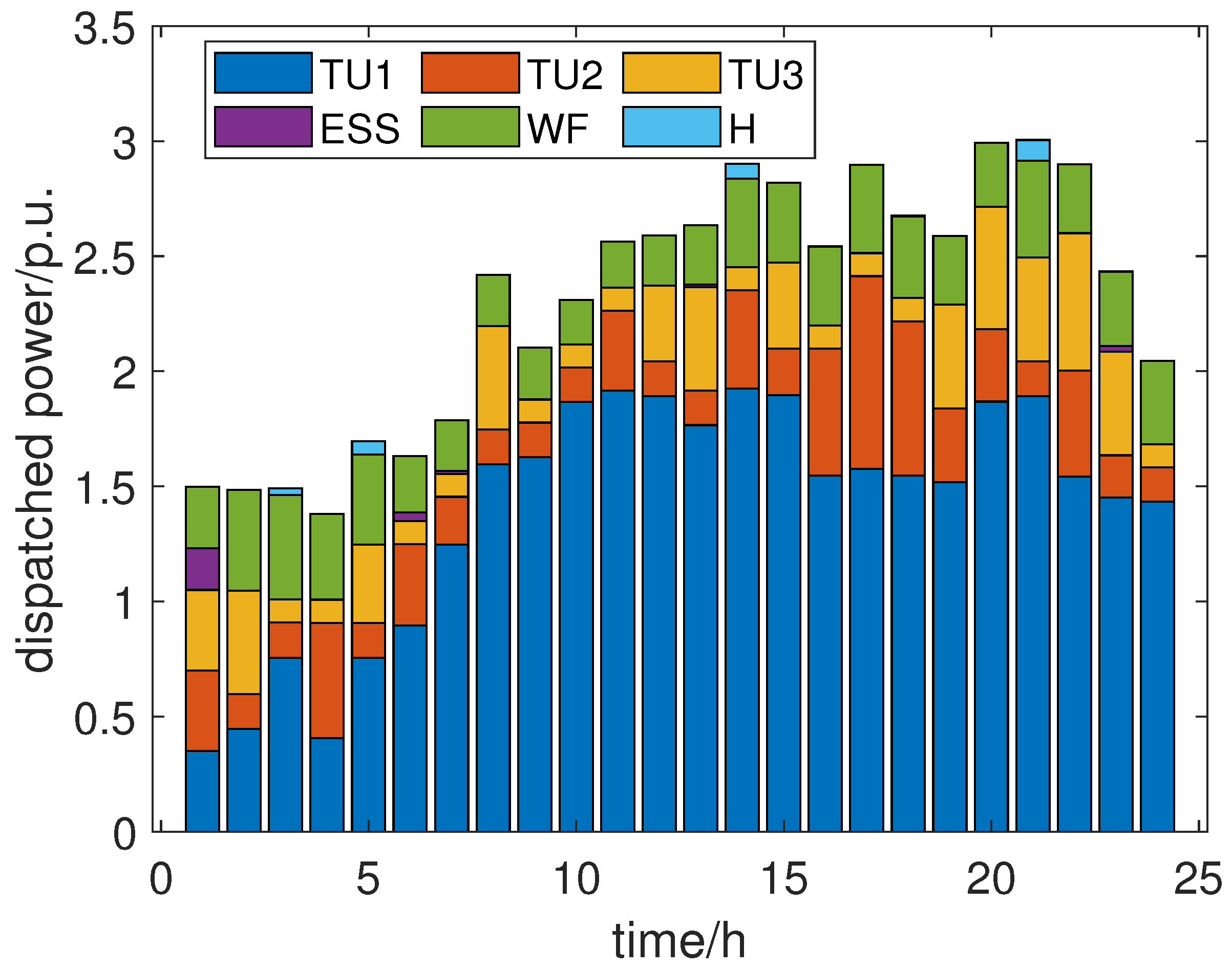
- the coordination of multiple ramp control sources: Unlike the simple system, the practical onshore grid usually contains multiple ramp control sources such as thermal units, electrochemical ESSs, and HSSs. Each ramp control resource has its unique operational characteristics such as generation limits, ramp limits, and expenses. Hence, it is challenging to dispatch these ramp control sources cooperatively to achieve specific goals.
- the impact of uncertainties: Unlike the one-line load demand or wind power profile. The practical wind power or load demand is usually uncertain, and the profile is in the form of strip rather the single line. Uncertainties in wind power or load demand make the ramp control more challenging because we need to obtain a deterministic dispatch strategy for all participating resources under uncertainties.
2.2. General Framework of Multi-Source Offshore Wind Power Ramp Control
3. Robust Coordinated Offshore Wind Power Ramp Control Model and Strategy
3.1. Coordinated Wind Power Ramp Control Model
3.1.1. Electrochemical Energy Storage System
3.1.2. Offshore Wind Farm and Hydrogen Storage System
3.1.3. Thermal Unit
3.1.4. Uncertainty Model
3.1.5. Power Flow Constraints
3.1.6. Power Balance Constraints
3.1.7. Objective Function
3.2. Coordinated Wind Power Ramp Control Strategy
3.2.1. Sub-Problem of Ramp Control
3.2.2. Master-Problem of Ramp Control
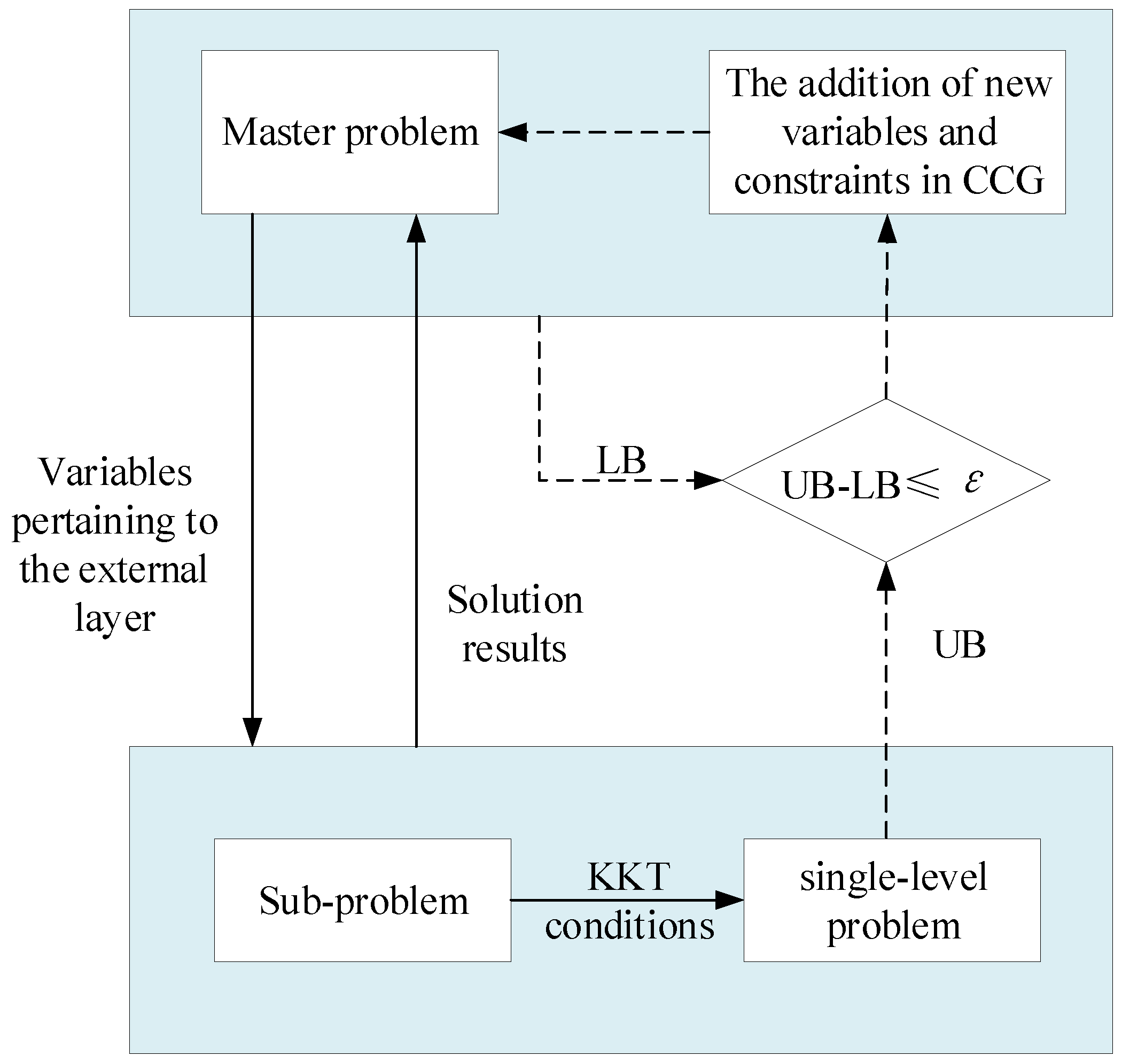
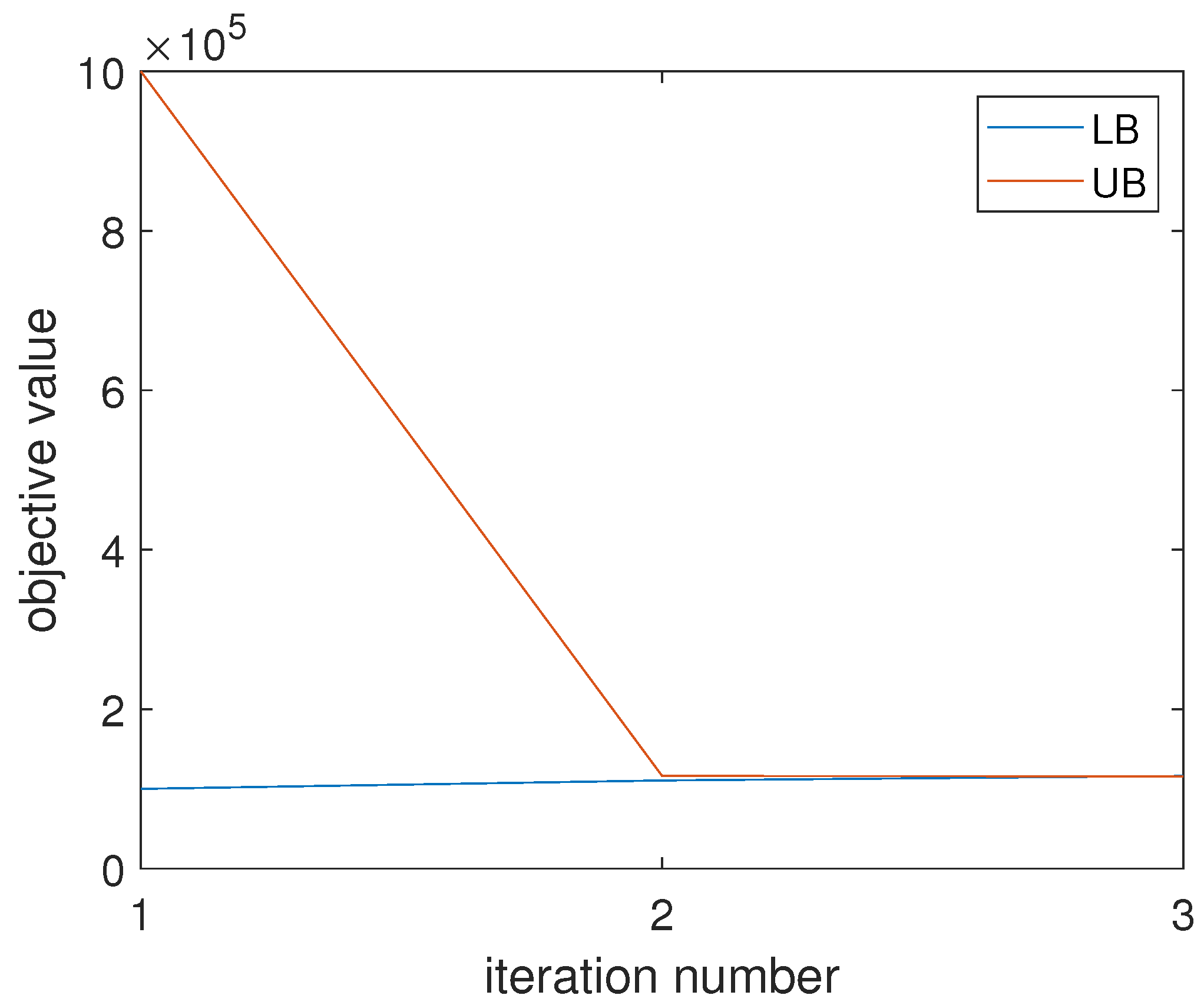
3.2.3. Column Constraint Generation-Based Robust Ramp Control Strategy
- Step 1: initialize the upper bound and lower bound ; the iteration number ; the maximum iteration number is . Initialize the worst scenario .
- Step 2: compute the master-problem to obtain the , and . Let .
- Step 3: substitute into the sub-problem to obtain the and the worst scenario . Let .
- Step 4: if , output the strategy; otherwise, , go to Step 2.

4. Case Studies
5. Conclusions
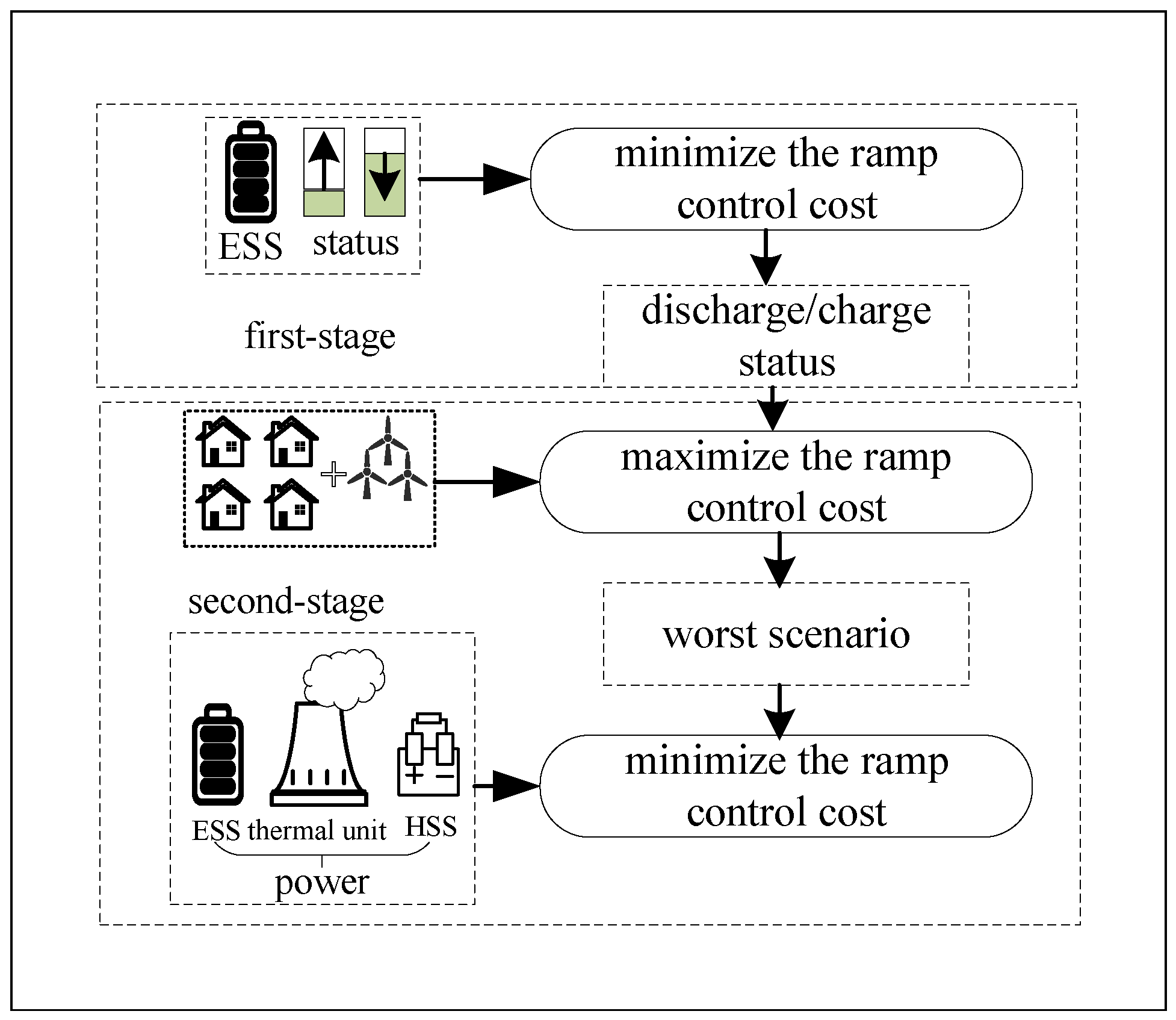
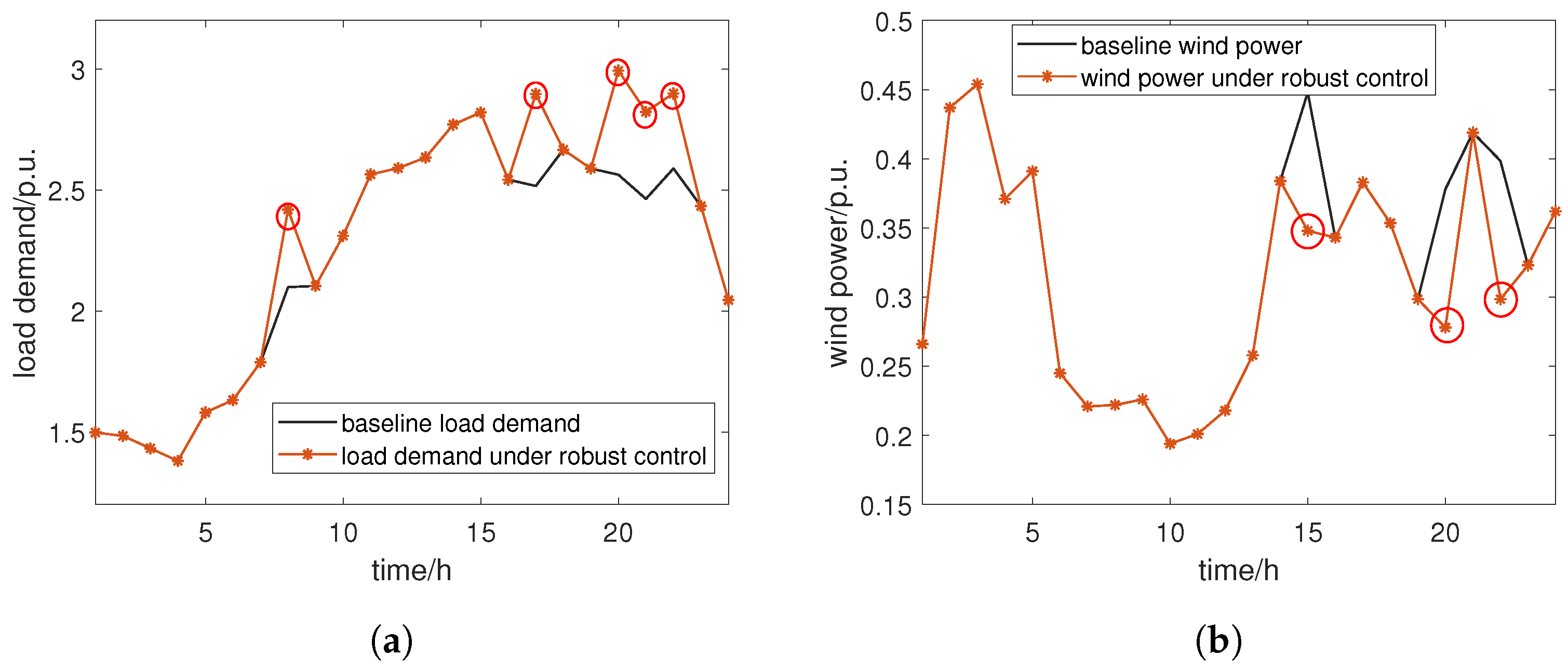
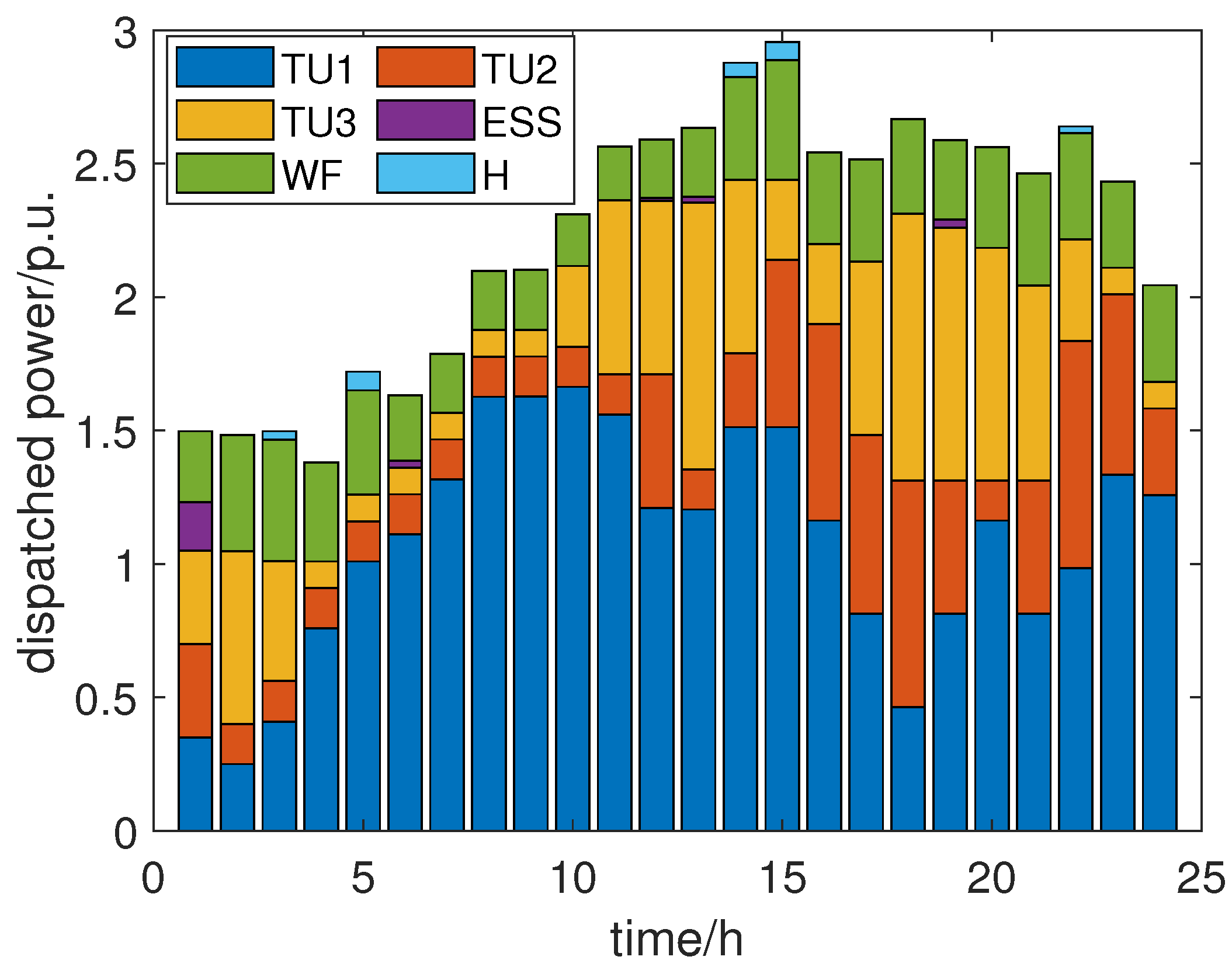
- Under the two-stage RO framework, the middle layer load and wind power uncertainties generate the worst scenario (maximum load minus minimal wind) to maximize the ramp control cost. Meanwhile the outer and inner layer ramp control sources minimize the ramp control cost and guarantee the security of operational constraints under the worst scenarios.
- Compared with the deterministic ramp control, robust ramp control uses more sources to handle the worst scenario, thus causing extra ramp control costs. Compared with the robust ramp control without the participation of HSS, the robust ramp control with HSS can significantly reduce the ramp control cost by acquiring profits in the hydrogen market.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cui, M.; Zhang, J.; Florita, A.R.; Hodge, B.M.; Ke, D.; Sun, Y. An optimized swinging door algorithm for identifying wind ramping events. IEEE Trans. Sustain. Energy 2015, 7, 150–162. [Google Scholar] [CrossRef]
- Cui, M.; Krishnan, V.; Hodge, B.M.; Zhang, J. A copula-based conditional probabilistic forecast model for wind power ramps. IEEE Trans. Smart Grid 2018, 10, 3870–3882. [Google Scholar] [CrossRef]
- Li, J.; Zhou, J.; Chen, B. Review of wind power scenario generation methods for optimal operation of renewable energy systems. Appl. Energy 2020, 280, 115992. [Google Scholar] [CrossRef]
- Gao, Y.; Ma, S.; Wang, T. The impact of climate change on wind power abundance and variability in China. Energy 2019, 189, 116215. [Google Scholar] [CrossRef]
- Boutsika, T.; Santoso, S. Quantifying short-term wind power variability using the conditional range metric. IEEE Trans. Sustain. Energy 2012, 3, 369–378. [Google Scholar] [CrossRef]
- Niu, Y.; Santoso, S. Conditional range metric for determining wind power variability of scarce or noisy data. IEEE Trans. Sustain. Energy 2015, 6, 454–463. [Google Scholar] [CrossRef]
- Watson, S. Quantifying the variability of wind energy. In Advances in Energy Systems: The Large-Scale Renewable Energy Integration Challenge; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2019; pp. 355–368. [Google Scholar]
- Ren, G.; Wan, J.; Liu, J.; Yu, D. Assessing temporal variability of wind resources in China and the spatial correlation of wind power in the selected regions. J. Renew. Sustain. Energy 2020, 12, 013302. [Google Scholar] [CrossRef]
- Garrido-Perez, J.M.; Ordóñez, C.; Barriopedro, D.; García-Herrera, R.; Paredes, D. Impact of weather regimes on wind power variability in western Europe. Appl. Energy 2020, 264, 114731. [Google Scholar] [CrossRef]
- Barasa, M.; Aganda, A. Wind power variability of selected sites in Kenya and the impact to system operating reserve. Renew. Energy 2016, 85, 464–471. [Google Scholar] [CrossRef]
- Feng, J.; Shen, W.Z. Wind farm power production in the changing wind: Robustness quantification and layout optimization. Energy Convers. Manag. 2017, 148, 905–914. [Google Scholar] [CrossRef]
- Ma, X.Y.; Sun, Y.Z.; Fang, H.L. Scenario generation of wind power based on statistical uncertainty and variability. IEEE Trans. Sustain. Energy 2013, 4, 894–904. [Google Scholar] [CrossRef]
- Wang, Z.; Shen, C.; Liu, F. A conditional model of wind power forecast errors and its application in scenario generation. Appl. Energy 2018, 212, 771–785. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, Y.; Kirschen, D.; Zhang, B. Model-free renewable scenario generation using generative adversarial networks. IEEE Trans. Power Syst. 2018, 33, 3265–3275. [Google Scholar] [CrossRef]
- Cui, M.; Feng, C.; Wang, Z.; Zhang, J. Statistical representation of wind power ramps using a generalized Gaussian mixture model. IEEE Trans. Sustain. Energy 2017, 9, 261–272. [Google Scholar] [CrossRef]
- Cui, M.; Zhang, J.; Wang, Q.; Krishnan, V.; Hodge, B.M. A data-driven methodology for probabilistic wind power ramp forecasting. IEEE Trans. Smart Grid 2017, 10, 1326–1338. [Google Scholar] [CrossRef]
- Gupta, S.; Kumar, N.; Srivastava, L.; Malik, H.; Anvari-Moghaddam, A.; García Márquez, F.P. A robust optimization approach for optimal power flow solutions using Rao algorithms. Energies 2021, 14, 5449. [Google Scholar] [CrossRef]
- Dong, J.; Yang, P.; Nie, S. Day-ahead scheduling model of the distributed small hydro-wind-energy storage power system based on two-stage stochastic robust optimization. Sustainability 2019, 11, 2829. [Google Scholar] [CrossRef]
- Núñez-Mata, O.; Palma-Behnke, R.; Valencia, F.; Mendoza-Araya, P.; Jiménez-Estévez, G. Adaptive protection system for microgrids based on a robust optimization strategy. Energies 2018, 11, 308. [Google Scholar] [CrossRef]
- Bertsimas, D.; Brown, D.B.; Caramanis, C. Theory and applications of robust optimization. SIAM Rev. 2011, 53, 464–501. [Google Scholar] [CrossRef]
- Lorca, A.; Sun, X.A. Adaptive robust optimization with dynamic uncertainty sets for multi-period economic dispatch under significant wind. IEEE Trans. Power Syst. 2014, 30, 1702–1713. [Google Scholar] [CrossRef]
- Xiong, P.; Jirutitijaroen, P.; Singh, C. A distributionally robust optimization model for unit commitment considering uncertain wind power generation. IEEE Trans. Power Syst. 2016, 32, 39–49. [Google Scholar] [CrossRef]
- Xu, X.; Hu, W.; Cao, D.; Huang, Q.; Liu, Z.; Liu, W.; Chen, Z.; Blaabjerg, F. Scheduling of wind-battery hybrid system in the electricity market using distributionally robust optimization. Renew. Energy 2020, 156, 47–56. [Google Scholar] [CrossRef]
- Qiu, H.; Long, H.; Gu, W.; Pan, G. Recourse-cost constrained robust optimization for microgrid dispatch with correlated uncertainties. IEEE Trans. Ind. Electron. 2020, 68, 2266–2278. [Google Scholar] [CrossRef]
- Meng, Y.; Fan, S.; Shen, Y.; Xiao, J.; He, G.; Li, Z. Transmission and distribution network-constrained large-scale demand response based on locational customer directrix load for accommodating renewable energy. Appl. Energy 2023, 350, 121681. [Google Scholar] [CrossRef]
- Pazouki, S.; Haghifam, M.R. Optimal planning and scheduling of energy hub in presence of wind, storage and demand response under uncertainty. Int. J. Electr. Power Energy Syst. 2016, 80, 219–239. [Google Scholar] [CrossRef]
- Zhang, D.; Dai, Y.; Zhang, X.; Zhang, J.; Wang, Z.; Xue, L. Review and prospect of research on wind power ramp events. Power Syst. Technol. 2018, 42, 1783–1792. [Google Scholar]
- Kamath, C. Associating weather conditions with ramp events in wind power generation. In Proceedings of the 2011 IEEE/PES Power Systems Conference and Exposition, Phoenix, AZ, USA, 20–23 March 2011; pp. 1–8. [Google Scholar]
- Maharjan, L.; Yamagishi, T.; Akagi, H. Active-power control of individual converter cells for a battery energy storage system based on a multilevel cascade PWM converter. IEEE Trans. Power Electron. 2010, 27, 1099–1107. [Google Scholar] [CrossRef]
- Şahin, M.E.; Blaabjerg, F. A hybrid PV-battery/supercapacitor system and a basic active power control proposal in MATLAB/simulink. Electronics 2020, 9, 129. [Google Scholar] [CrossRef]
- Hossain Lipu, M.S.; Miah, M.S.; Ansari, S.; Meraj, S.T.; Hasan, K.; Elavarasan, R.M.; Mamun, A.A.; Zainuri, M.A.A.; Hussain, A. Power electronics converter technology integrated energy storage management in electric vehicles: Emerging trends, analytical assessment and future research opportunities. Electronics 2022, 11, 562. [Google Scholar] [CrossRef]
- Shan, Y.; Hu, J.; Chan, K.W.; Fu, Q.; Guerrero, J.M. Model predictive control of bidirectional DC–DC converters and AC/DC interlinking converters—A new control method for PV-wind-battery microgrids. IEEE Trans. Sustain. Energy 2018, 10, 1823–1833. [Google Scholar] [CrossRef]
- PJM Interconnection. Data Miner API Guide. 2023. Available online: https://www.pjm.com/-/media/etools/dataminer-2/data-miner-2-api-guide.ashx (accessed on 1 September 2023).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Unit | Parameter | Value |
|---|---|---|
| Energy storage | CHY/MWh | 22 |
| CHY/MWh | 20 | |
| MW, MW | 20 | |
| MW | 6 | |
| MW | 60 | |
| MW | 50 | |
| MW | 20 | |
| , | 0.9 | |
| Wind turbine | , MW | 5 |
| No. | Cost | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 7 | 14 | 18 | 1 | 5 | 17 | 10,630 |
| 2 | 4 | 9 | 11 | 17 | 22 | 1 | 8 | 22 | 10,627 |
| 3 | 7 | 14 | 15 | 18 | 24 | 11 | 12 | 15 | 10,615 |
| 4 | 5 | 8 | 13 | 16 | 24 | 3 | 4 | 11 | 10,656 |
| 5 | 3 | 13 | 21 | 22 | 23 | 7 | 12 | 16 | 10,639 |
| 6 | 4 | 6 | 8 | 20 | 21 | 6 | 7 | 20 | 10,614 |
| 7 | 9 | 12 | 13 | 19 | 20 | 7 | 11 | 15 | 10,531 |
| 8 | 2 | 10 | 11 | 14 | 22 | 7 | 17 | 18 | 10,639 |
| 9 | 1 | 4 | 8 | 11 | 14 | 3 | 19 | 22 | 10,694 |
| 10 | 4 | 6 | 14 | 21 | 23 | 8 | 12 | 20 | 10,687 |
| No. of Scenarios | 10 | 50 | 100 | 150 | 500 |
|---|---|---|---|---|---|
| Cost | 10,605 | 10,803 | 11,036 | 11,089 | 11,045 |
| No. | Strategy 1 | Strategy 2 | Strategy 3 | Strategy 4 | Strategy 5 | RO |
|---|---|---|---|---|---|---|
| 1.2% | −1.5% | −3.7% | 2.2% | 3.2% | 5.1% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, B.; Jia, Y.; Li, Q.; Wang, D.; Tang, W.; Zhang, S. Robust Wind Power Ramp Control Strategy Considering Wind Power Uncertainty. Electronics 2024, 13, 211. https://doi.org/10.3390/electronics13010211
Ren B, Jia Y, Li Q, Wang D, Tang W, Zhang S. Robust Wind Power Ramp Control Strategy Considering Wind Power Uncertainty. Electronics. 2024; 13(1):211. https://doi.org/10.3390/electronics13010211
Chicago/Turabian StyleRen, Bixing, Yongyong Jia, Qiang Li, Dajiang Wang, Weijia Tang, and Sen Zhang. 2024. "Robust Wind Power Ramp Control Strategy Considering Wind Power Uncertainty" Electronics 13, no. 1: 211. https://doi.org/10.3390/electronics13010211