
Redefining User Expectations: The Impact of Adjustable Social Autonomy in Human–Robot Interaction

Abstract
:1. Introduction
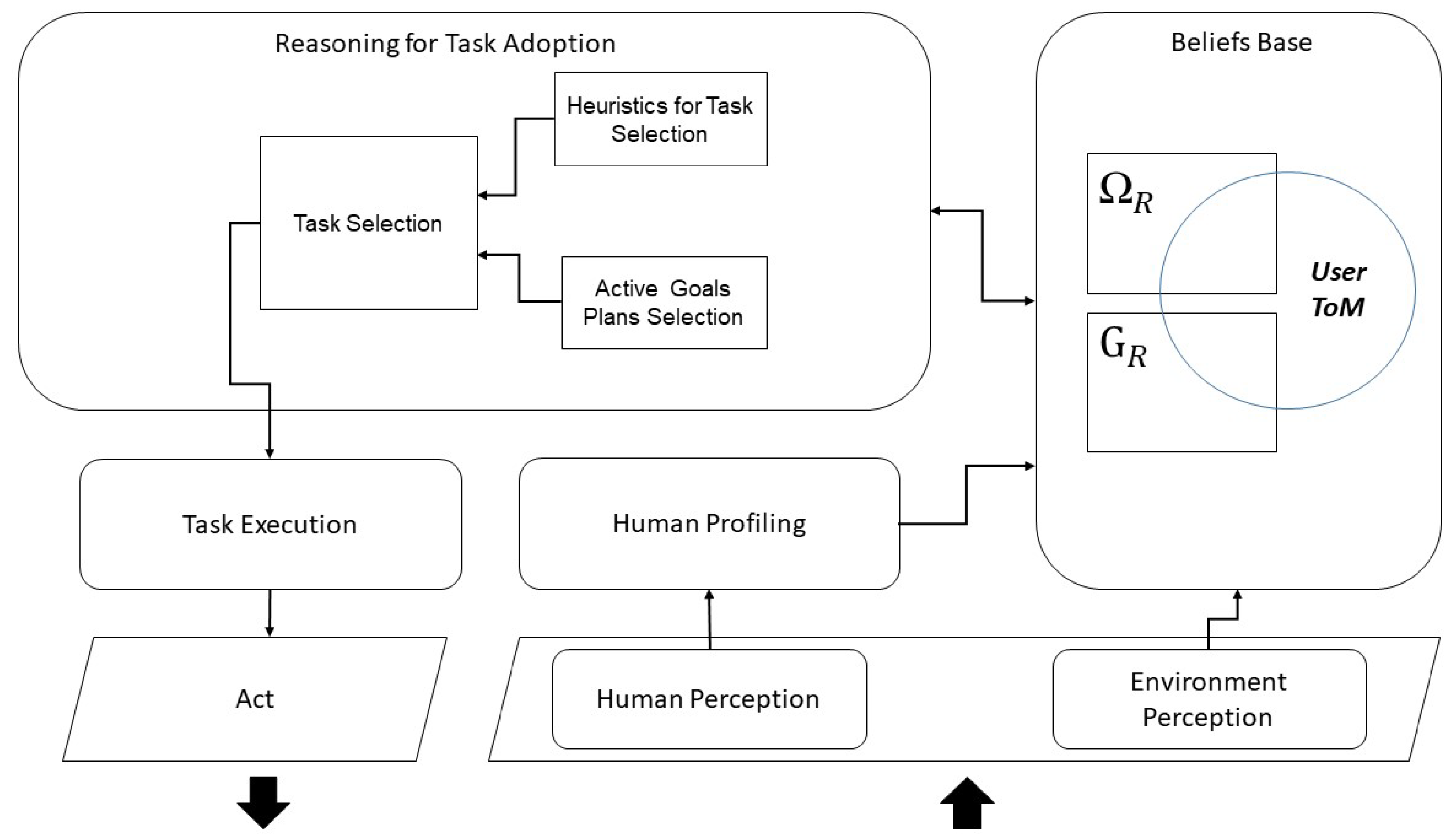
- Pursue their own goals, i.e., the state of affairs the user wants to achieve;
- Consider broader interests or active goals, i.e., the state of affairs that the user, with a specific profile and set of mental states, could be interested in or has already planned to achieve.
2. Background
- Literal help: the contractor adopts exactly what has been delegated by the client;
- Sub help: the contractor satisfies just a sub-goal of the delegated task;
- Over help: the contractor goes beyond what has been delegated by the client without changing the client’s plan;
- Critical help: the contractor satisfies the relevant results of the requested plan/action, but modifies that plan/action;
- Critical Sub help: the contractor realizes a sub help and in addition modifies the plan/action;
- Critical Over help: the contractor realizes an over help and in addition modifies the plan/action;
- Hyper-critical help: the contractor adopts goals or interests of the client that the client itself did not take into account (at least, in that specific interaction with the contractor): by doing so, the contractor neither performs the action/plan nor satisfies the results that were delegated.
3. Related Works
3.1. Adaptivity in HRI
3.2. Adaptive Social Robots in Museum Settings
4. Methodology
4.1. Definition of Adoption Levels
4.2. Hypothesis
4.3. Participants
4.4. Design
- Starting Interaction: the robot started the interaction by introducing itself to the user, providing an overview of its role and the virtual museum it managed;
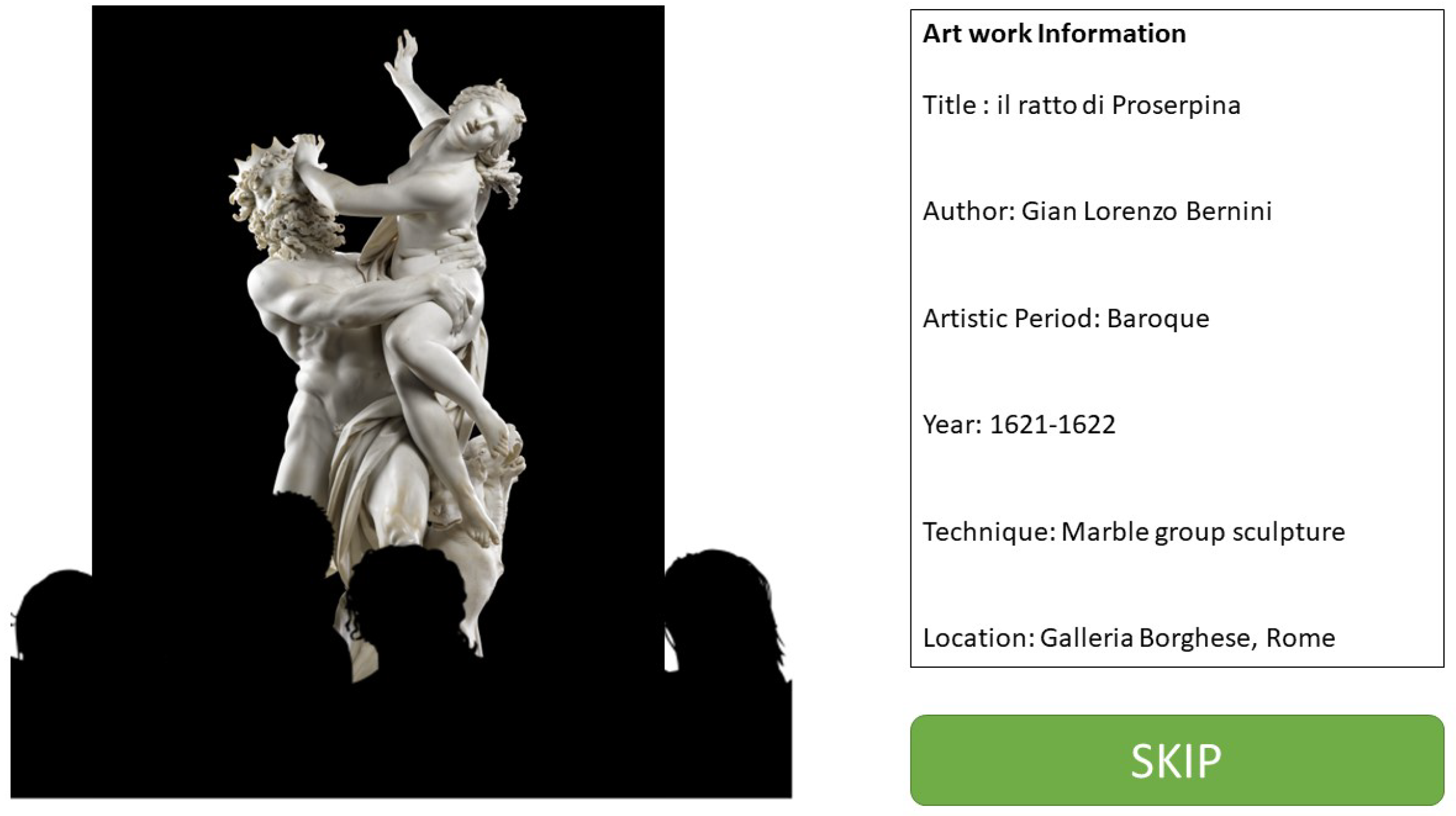
- User Profiling: The robot investigated the user’s artistic preferences in terms of favored and less favored artistic periods. Subsequently, the robot asked the user about the desired level of detail in the artwork descriptions as an indicator of the user’s intended level of engagement. Lastly, the robot asked the user to specify her tolerance level regarding the number of people present in a room while viewing an artwork (crowding index).
- First Tour presentation: After finalizing the user’s profile, the tour composition was determined by the condition the robot randomly decided to implement (LH or CH). Once the selection was complete, the robot activated the corresponding tour and left the control to the user, allowing her the virtual tour.
- First Tour evaluation: at the conclusion of the first virtual tour, the robot administrated a questionnaire to assess the user satisfaction and surprise level with the completed visit (see Section 4.6).
- Second Tour presentation: subsequently, the robot offered an alternative tour, implementing the opposite type of help compared to the one randomly selected in the first tour.
- Second Tour evaluation: after the completion of the second tour, the robot administrates the user with a new satisfaction/surprise questionnaire.
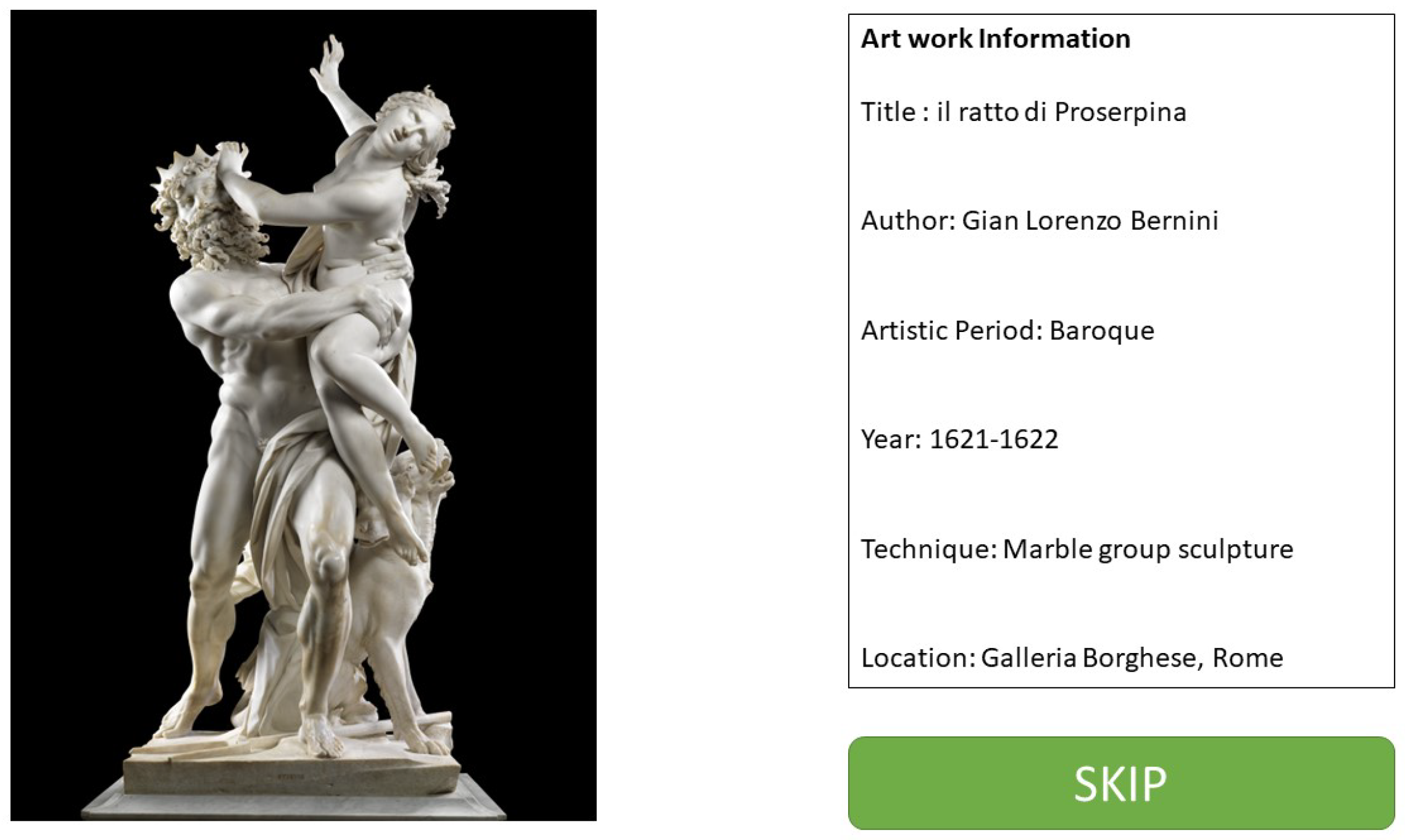
4.5. Materials
4.6. Measurements
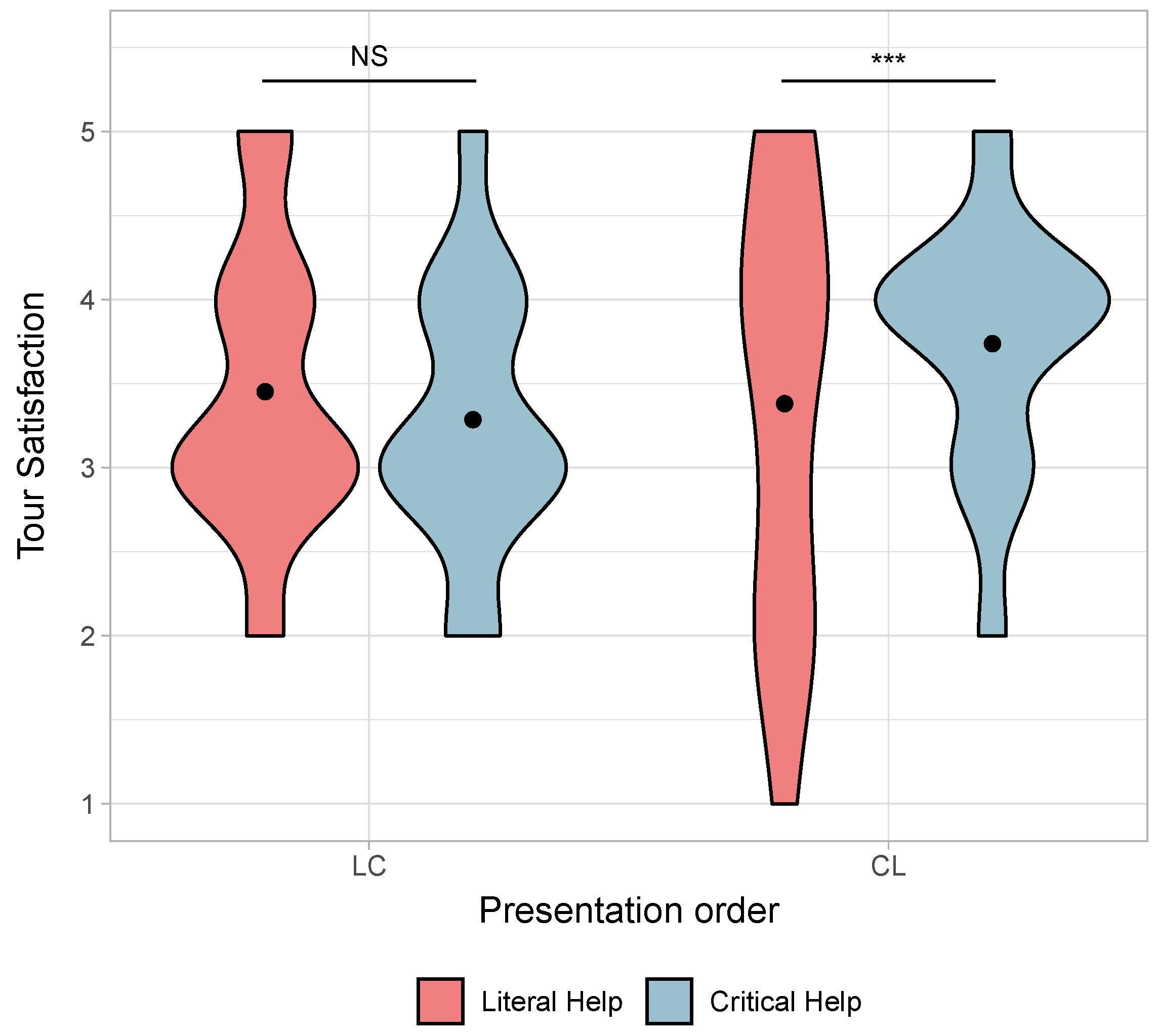
- Tour Satisfaction: User satisfaction with the presented tour was measured using the following question: “How satisfied are you with the quality of the visit that the robot offered you?” Participants responded using a 5-item Likert scale ranging from not satisfied at all (1) to completely satisfied (5);
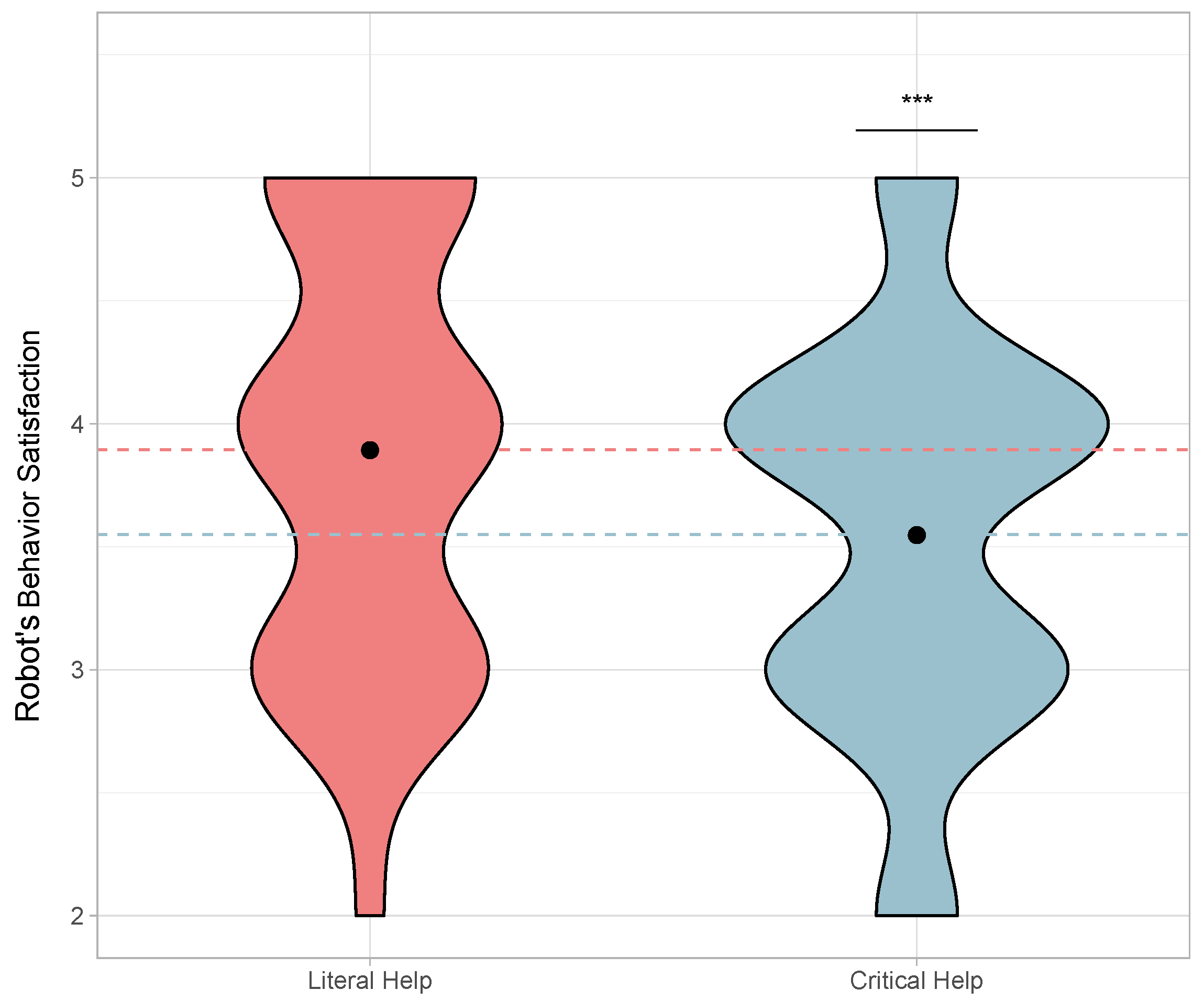
- Robot Behavior Satisfaction: For assessing user satisfaction with the robot’s behavior, participants were asked the following question: “How satisfied are you with the choice of robot compared to the artistic habits you expressed at the beginning of the interaction?” Participant satisfaction was investigated the same as with Tour Satisfaction;
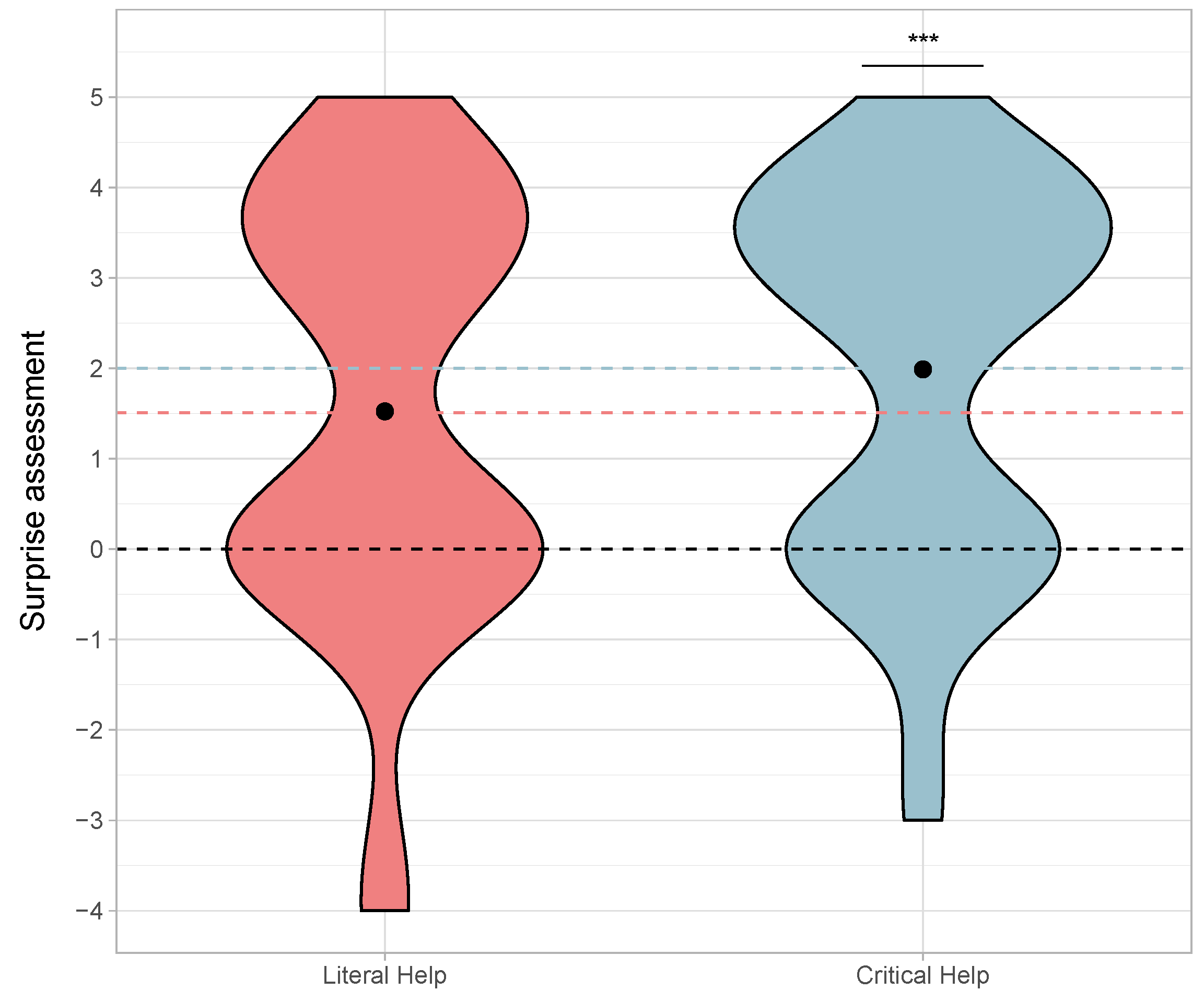
- Surprise: For assessing the users’ surprise about the type of help provided by the robot, we exploited the question “How surprised are you by the choices made by the robot?” Participants responded using an 11-item Likert scale. A rating of −5 indicated a strong negative surprise, 0 represented no surprise at all, and 5 signified complete positive surprise.
5. Statistical Analysis
6. Results
7. Discussion
- The effect on user satisfaction: we aimed to discern how the introduction of critical capacity affects user satisfaction ( and );
- The level of surprise: we sought to determine the extent of surprise elicited in humans by this type of robot behavior ().
8. Conclusions and Future Works
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mahdi, H.; Akgun, S.A.; Saleh, S.; Dautenhahn, K. A survey on the design and evolution of social robots—Past, present and future. Robot. Auton. Syst. 2022, 156, 104193. [Google Scholar] [CrossRef]
- David, D.; Thérouanne, P.; Milhabet, I. The acceptability of social robots: A scoping review of the recent literature. Comput. Hum. Behav. 2022, 137, 107419. [Google Scholar] [CrossRef]
- Cantucci, F.; Falcone, R. Collaborative Autonomy: Human–Robot Interaction to the Test of Intelligent Help. Electronics 2022, 11, 19. [Google Scholar] [CrossRef]
- Gasteiger, N.; Hellou, M.; Ahn, H.S. Deploying social robots in museum settings: A quasi-systematic review exploring purpose and acceptability. Int. J. Adv. Robot. Syst. 2021, 18, 17298814211066740. [Google Scholar] [CrossRef]
- Ragno, L.; Borboni, A.; Vannetti, F.; Amici, C.; Cusano, N. Application of Social Robots in Healthcare: Review on Characteristics, Requirements, Technical Solutions. Sensors 2023, 23, 6820. [Google Scholar] [CrossRef] [PubMed]
- Fang, S.; Han, X.; Chen, S. The impact of tourist–robot interaction on tourist engagement in the hospitality industry: A mixed-method study. Cornell Hosp. Q. 2023, 64, 246–266. [Google Scholar] [CrossRef]
- Ahmad, M.I.; Mubin, O.; Orlando, J. A systematic review of adaptivity in human–robot interaction. Multimodal Technol. Interact. 2017, 1, 14. [Google Scholar] [CrossRef]
- Falcone, R.; Castelfranchi, C. The human in the loop of a delegated agent: The theory of adjustable social autonomy. IEEE Trans. Syst. Man-Cybern. Syst. Hum. 2001, 31, 406–418. [Google Scholar] [CrossRef]
- Robaczewski, A.; Bouchard, J.; Bouchard, K.; Gaboury, S. Socially assistive robots: The specific case of the NAO. Int. J. Soc. Robot. 2021, 13, 795–831. [Google Scholar] [CrossRef]
- Castelfranchi, C.; Falcone, R. Towards a theory of delegation for agent-based systems. Robot. Auton. Syst. 1998, 24, 141–157. [Google Scholar] [CrossRef]
- Bianco, F.; Ognibene, D. Functional advantages of an adaptive theory of mind for robotics: A review of current architectures. In Proceedings of the 2019 11th Computer Science and Electronic Engineering (CEEC), Colchester, UK, 18–20 September 2019; pp. 139–143. [Google Scholar]
- Montes, N.; Luck, M.; Osman, N.; Rodrigues, O.; Sierra, C. Combining theory of mind and abductive reasoning in agent-oriented programming. Auton. Agents Multi-Agent Syst. 2023, 37, 36. [Google Scholar] [CrossRef]
- Cantucci, F.; Falcone, R. Towards trustworthiness and transparency in social human–robot interaction. In Proceedings of the 2020 IEEE International Conference on Human–Machine Systems (ICHMS), Online, 7–9 September 2020; pp. 1–6. [Google Scholar]
- Rao, A.S.; Georgeff, M.P. BDI agents: From theory to practice. In Proceedings of the ICMAS, San Francisco, CA, USA, 12–14 June 1995; Volume 95, pp. 312–319. [Google Scholar]
- De Silva, L.; Meneguzzi, F.R.; Logan, B. BDI agent architectures: A survey. In Proceedings of the 29th International Joint Conference on Artificial Intelligence (IJCAI), Yokohama, Japan, 11–17 July 2020. [Google Scholar]
- Rossi, S.; Ferland, F.; Tapus, A. User profiling and behavioral adaptation for HRI: A survey. Pattern Recognit. Lett. 2017, 99, 3–12. [Google Scholar] [CrossRef]
- Hoffman, G.; Breazeal, C. Effects of anticipatory action on human–robot teamwork efficiency, fluency, and perception of team. In Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction, Arlington, VA, USA, 10–12 March 2007; pp. 1–8. [Google Scholar]
- Tapus, A.; Ţăpuş, C.; Matarić, M.J. User—robot personality matching and assistive robot behavior adaptation for post-stroke rehabilitation therapy. Intell. Serv. Robot. 2008, 1, 169–183. [Google Scholar] [CrossRef]
- Belpaeme, T.; Baxter, P.E.; Read, R.; Wood, R.; Cuayáhuitl, H.; Kiefer, B.; Racioppa, S.; Kruijff-Korbayová, I.; Athanasopoulos, G.; Enescu, V.; et al. Multimodal child-robot interaction: Building social bonds. J. Hum.-Robot. Interact. 2012, 1, 33–53. [Google Scholar] [CrossRef]
- Devin, S.; Alami, R. An implemented theory of mind to improve human–robot shared plans execution. In Proceedings of the 2016 11th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Christchurch, New Zealand, 7–10 March 2016; pp. 319–326. [Google Scholar]
- Lemaignan, S.; Warnier, M.; Sisbot, E.A.; Clodic, A.; Alami, R. Artificial cognition for social human–robot interaction: An implementation. Artif. Intell. 2017, 247, 45–69. [Google Scholar] [CrossRef]
- Görür, O.C.; Rosman, B.S.; Hoffman, G.; Albayrak, S. Toward integrating theory of mind into adaptive decision-making of social robots to understand human intention. In Proceedings of the International Conference on Human-Robot Interaction, Vienna, Austria, 6 March 2017. [Google Scholar]
- Umbrico, A.; De Benedictis, R.; Fracasso, F.; Cesta, A.; Orlandini, A.; Cortellessa, G. A mind-inspired architecture for adaptive hri. Int. J. Soc. Robot. 2023, 15, 371–391. [Google Scholar] [CrossRef] [PubMed]
- Tanevska, A.; Rea, F.; Sandini, G.; Cañamero, L.; Sciutti, A. A socially adaptable framework for human–robot interaction. Front. Robot. AI 2020, 7, 121. [Google Scholar] [CrossRef]
- Vinanzi, S.; Cangelosi, A. CASPER: Cognitive Architecture for Social Perception and Engagement in Robots. arXiv 2022, arXiv:2209.01012. [Google Scholar]
- Maroto-Gómez, M.; Castro-González, Á.; Castillo, J.C.; Malfaz, M.; Salichs, M.Á. An adaptive decision-making system supported on user preference predictions for human–robot interactive communication. User Model. User-Adapt. Interact. 2023, 33, 359–403. [Google Scholar] [CrossRef]
- Irfan, B.; Céspedes, N.; Casas, J.; Senft, E.; Gutiérrez, L.F.; Rincon-Roncancio, M.; Cifuentes, C.A.; Belpaeme, T.; Múnera, M. Personalised socially assistive robot for cardiac rehabilitation: Critical reflections on long-term interactions in the real world. User Model. User-Adapt. Interact. 2023, 33, 497–544. [Google Scholar] [CrossRef]
- Burgard, W.; Cremers, A.B.; Fox, D.; Hähnel, D.; Lakemeyer, G.; Schulz, D.; Steiner, W.; Thrun, S. Experiences with an interactive museum tour-guide robot. Artif. Intell. 1999, 114, 3–55. [Google Scholar] [CrossRef]
- Thrun, S.; Bennewitz, M.; Burgard, W.; Cremers, A.B.; Dellaert, F.; Fox, D.; Hahnel, D.; Rosenberg, C.; Roy, N.; Schulte, J.; et al. MINERVA: A second-generation museum tour-guide robot. In Proceedings of the 1999 IEEE International Conference on Robotics and Automation (Cat. No. 99CH36288C), Detroit, MI, USA, 10–15 May 1999; Volume 3. [Google Scholar]
- Nieuwenhuisen, M.; Behnke, S. Human-like interaction skills for the mobile communication robot robotinho. Int. J. Soc. Robot. 2013, 5, 549–561. [Google Scholar] [CrossRef]
- Chella, A.; Liotta, M.; Macaluso, I. CiceRobot: A cognitive robot for interactive museum tours. Ind. Robot. Int. J. 2007, 34, 503–511. [Google Scholar] [CrossRef]
- Willeke, T.; Kunz, C.; Nourbakhsh, I.R. The History of the Mobot Museum Robot Series: An Evolutionary Study. In Proceedings of the FLAIRS Conference, Key West, FL, USA, 21–23 May 2001; pp. 514–518. [Google Scholar]
- Lee, M.K.; Forlizzi, J.; Kiesler, S.; Rybski, P.; Antanitis, J.; Savetsila, S. Personalization in HRI: A longitudinal field experiment. In Proceedings of the 2012 7th ACM/IEEE International Conference on Human–Robot Interaction (HRI), Boston, MA, USA, 5–8 March 2012; pp. 319–326. [Google Scholar]
- Hellou, M.; Lim, J.; Gasteiger, N.; Jang, M.; Ahn, H.S. Technical Methods for Social Robots in Museum Settings: An Overview of the Literature. Int. J. Soc. Robot. 2022, 14, 1767–1786. [Google Scholar] [CrossRef]
- Iio, T.; Satake, S.; Kanda, T.; Hayashi, K.; Ferreri, F.; Hagita, N. Human-like guide robot that proactively explains exhibits. Int. J. Soc. Robot. 2020, 12, 549–566. [Google Scholar] [CrossRef]
- Park, J.; Kim, J.; Kim, D.Y.; Kim, J.; Kim, M.G.; Choi, J.; Lee, W. User Perception on Personalized Explanation by Science Museum Docent Robot. In Proceedings of the 2022 17th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Sapporo, Japan, 7–10 March 2022; pp. 973–975. [Google Scholar]
- Cantucci, F.; Falcone, R. Autonomous Critical Help by a Robotic Assistant in the field of Cultural Heritage: A New Challenge for Evolving Human-Robot Interaction. Multimodal Technol. Interact. 2022, 6, 69. [Google Scholar] [CrossRef]
- Palazzo delle Esposizioni Roma. Available online: https://www.palazzoesposizioni.it/ (accessed on 1 May 2022).
- Bordini, R.H.; Hübner, J.F.; Wooldridge, M. Programming Multi-Agent Systems in Agentspeak Using JASON; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Jason, a BDI Agent Programming Language. Available online: https://github.com/jason-lang/jason/releases (accessed on 1 December 2020).
- Spring Boot. Available online: https://spring.io/projects/spring-boot (accessed on 22 January 2022).
- Argan, G.C. Storia Dell’Arte Italiana; Sansoni: Florence, Italy, 1968. [Google Scholar]
- George, D. SPSS for Windows Step by Step: A Simple Study Guide and Reference, 17.0 Update, 10/e; Pearson Education India: Delhi, India, 2011. [Google Scholar]
- Jamovi Project. Available online: https://www.jamovi.org/ (accessed on 3 January 2020).
- Stroup, W.W. Generalized Linear Mixed Models: Modern Concepts, Methods and Applications; CRC Press, Taylor & Francis Group: Boca Raton, FL, USA, 2013. [Google Scholar]
- Gallucci, M. GAMLj: General Analyses for the Linear Model in Jamovi (2.6.6). 2022. Available online: https://gamlj.github.io/ (accessed on 1 December 2020).
- Ng, V.K.Y.; Cribbie, R.A. Using the Gamma Generalized Linear Model for Modeling Continuous, Skewed and Heteroscedastic Outcomes in Psychology. Curr. Psychol. 2017, 36, 225–235. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Literal Help | Critical Help | |||||
|---|---|---|---|---|---|---|
| N | Mean | SD | N | Mean | SD | |
| Tour Satisfaction | 84 | 3.17 | 1.00 | 84 | 3.52 | 1.11 |
| Robot Performance Satisfaction | 84 | 3.82 | 1.04 | 84 | 3.48 | 0.94 |
| Surprise | 84 | 3.25 | 0.83 | 84 | 3.49 | 0.88 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cantucci, F.; Falcone, R.; Marini, M. Redefining User Expectations: The Impact of Adjustable Social Autonomy in Human–Robot Interaction. Electronics 2024, 13, 127. https://doi.org/10.3390/electronics13010127
Cantucci F, Falcone R, Marini M. Redefining User Expectations: The Impact of Adjustable Social Autonomy in Human–Robot Interaction. Electronics. 2024; 13(1):127. https://doi.org/10.3390/electronics13010127
Chicago/Turabian StyleCantucci, Filippo, Rino Falcone, and Marco Marini. 2024. "Redefining User Expectations: The Impact of Adjustable Social Autonomy in Human–Robot Interaction" Electronics 13, no. 1: 127. https://doi.org/10.3390/electronics13010127