
A Modular Haptic Agent System with Encountered-Type Active Interaction


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- 1.
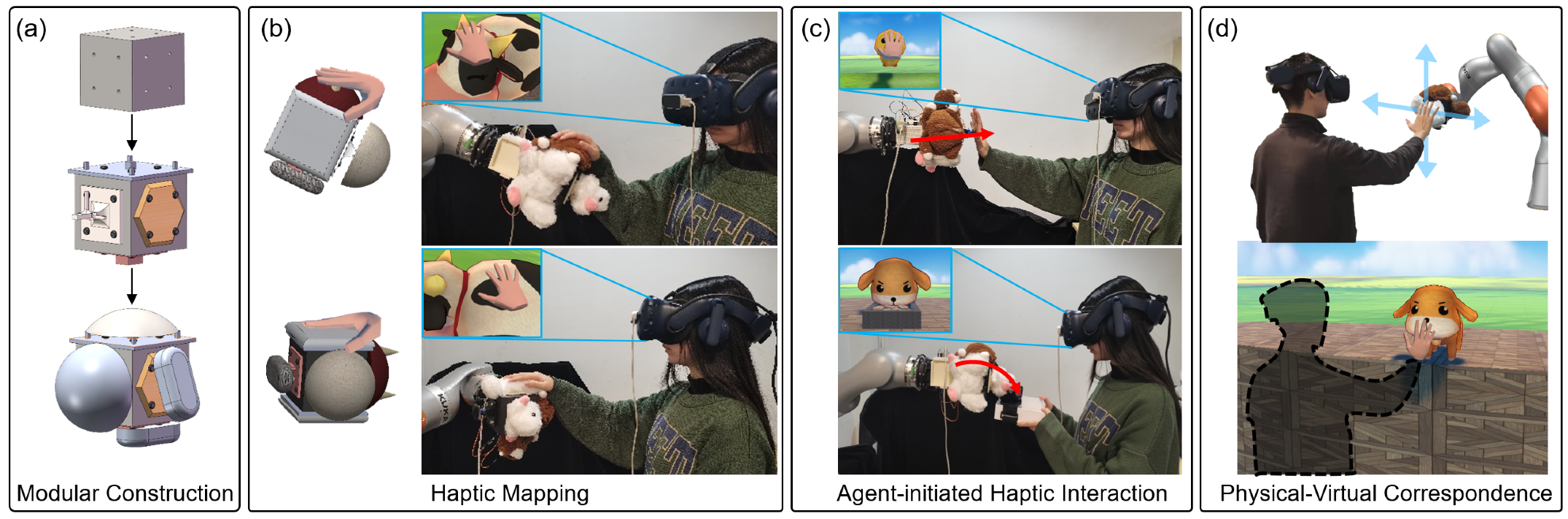
- We propose the design methods of the haptic module of virtual agents by deconstructing the tactile elements of haptic proxies. We also provide a haptic mapping method for haptic simulation to fit the appearance and animation of different virtual agents.
- 2.
- We develop a prototyping system called MHA to build haptic proxies of virtual agents in VR. The MHA system allows for predicting some of the user’s interaction intentions and enables the agent to initiate a haptic interaction with the user.
- 3.
- Three user studies have been conducted to verify the advantages of building modular haptic agents based on the modular design method and the encountered-type haptic interactions. Experimental results have proved that MHA has the potential to quickly build diversified companion agents with haptic interactions in VR.
2. Related works
2.1. Virtual Pets
2.2. Encountered-Type Haptics in VR
3. Design Methods
- RQ1: What is an efficient method for constructing a large number of haptic proxies for different agents using minimal props?
- RQ2: How can agent-initiated interactions be designed to enhance the sense of companionship?
3.1. Haptic Proxies Construction with Minimal Props
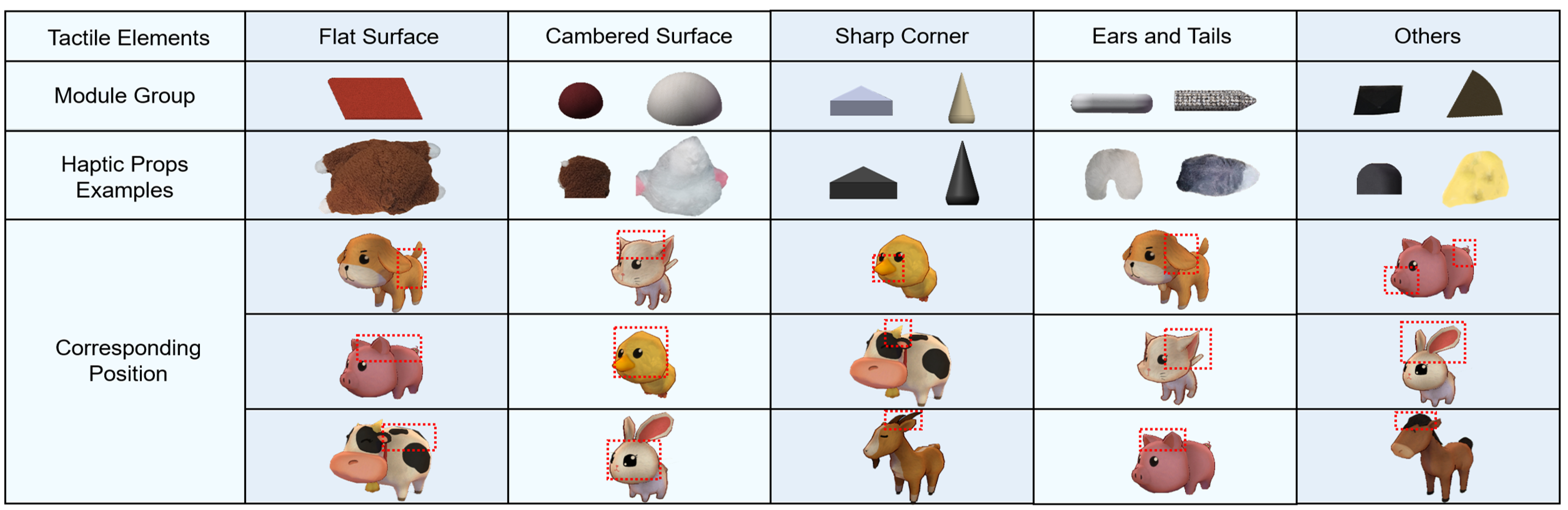
3.1.1. Classification of Tactile Elements
- Flat surface: A large flat soft surface, often covered with long or short fur (e.g., the heads and bodies of dogs, pet pigs, and pet calves). When the users come in contact with the flat surfaces, their hands are often extended, and users touch along the plane or gently pat along the normal direction of the plane.
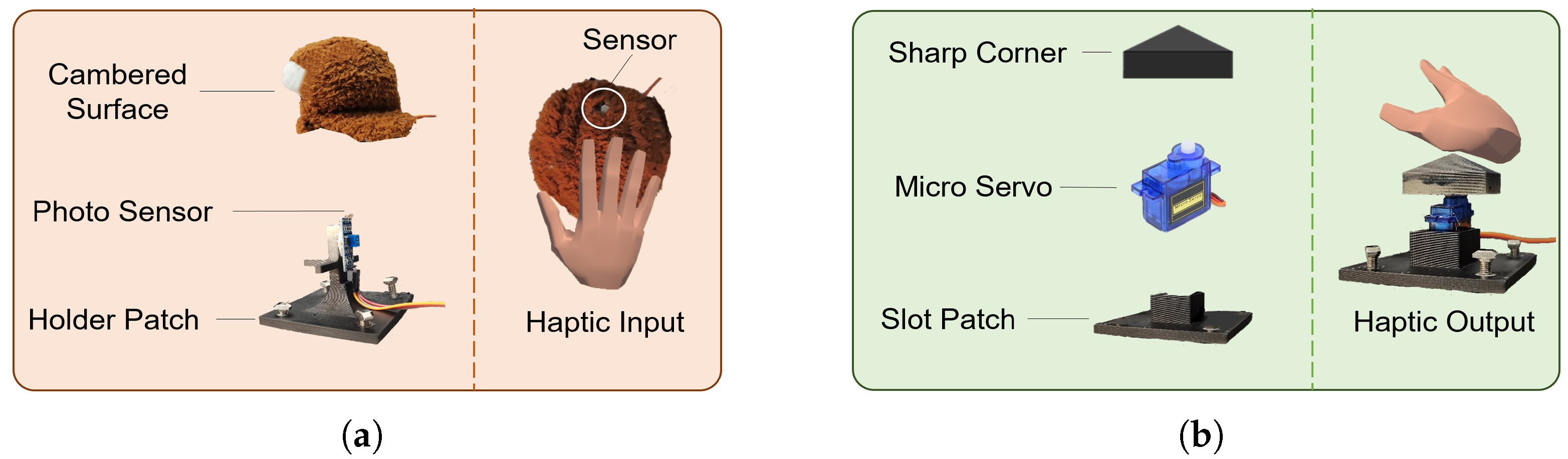
- Cambered surface: A soft surface with a large or small radius of curvature, often covered with long or short fur (e.g., the heads of kittens, ducks, and rabbits). When the users come in contact with the cambered surfaces, their hands are often half open, and users touch them with their palms or fingertips, sliding in a circle with their hands.
- Sharp corner: A hard, sharp pyramid or cylinder. For small sharp corners (e.g., the mouths of ducks), users often touch them with the tips of their fingers or palms. For large sharp corners (e.g., the horns of pet calves or lambs), users often touch or hold them with multiple fingers and palms.
- Ears and tails: A soft triangular or elliptical piece or column, often covered with long or short fur (e.g., the triangular ears and elliptical tails of dogs, pet pigs, and kittens). When the users come in with contact the ears, their hands are either fully extended or bent to pinch. When the users come in with contact the tails, their hands often hold the tails or rub up and down.
- Others: Some special pets have special tactile elements that are very unique (e.g., the long ears of rabbits, the mane of pet ponies, and the nose and tail of pet pigs). When interacting with these pets, users will make specific haptic interactions according to specific situations (e.g., patting the ears of rabbits, fondling the mane of ponies, and pinching the nose of pigs).
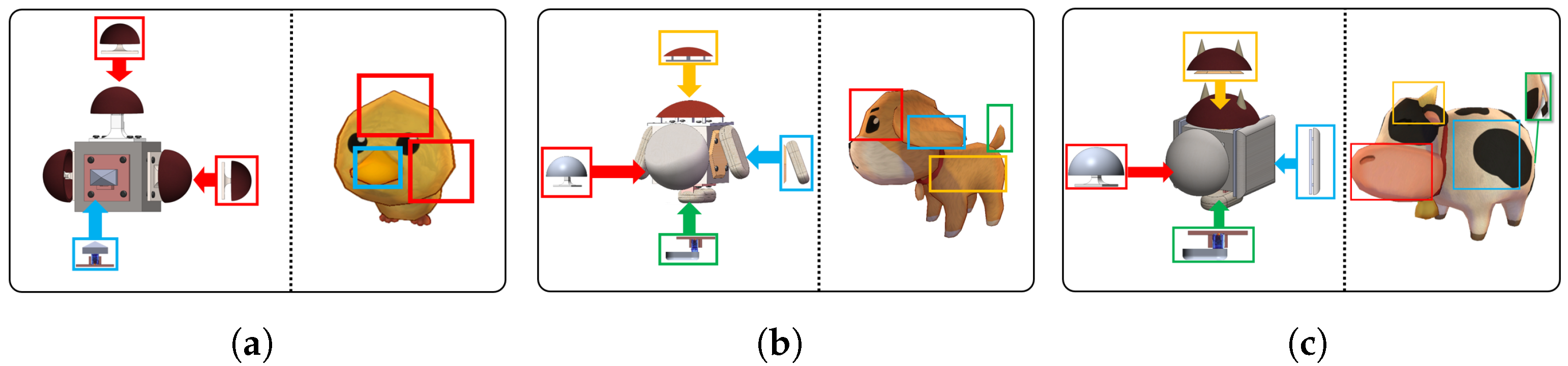
3.1.2. Modular Design Method
3.1.3. Haptic Mapping Method
3.2. Agent-Initiated Active Interaction
4. System Implementation
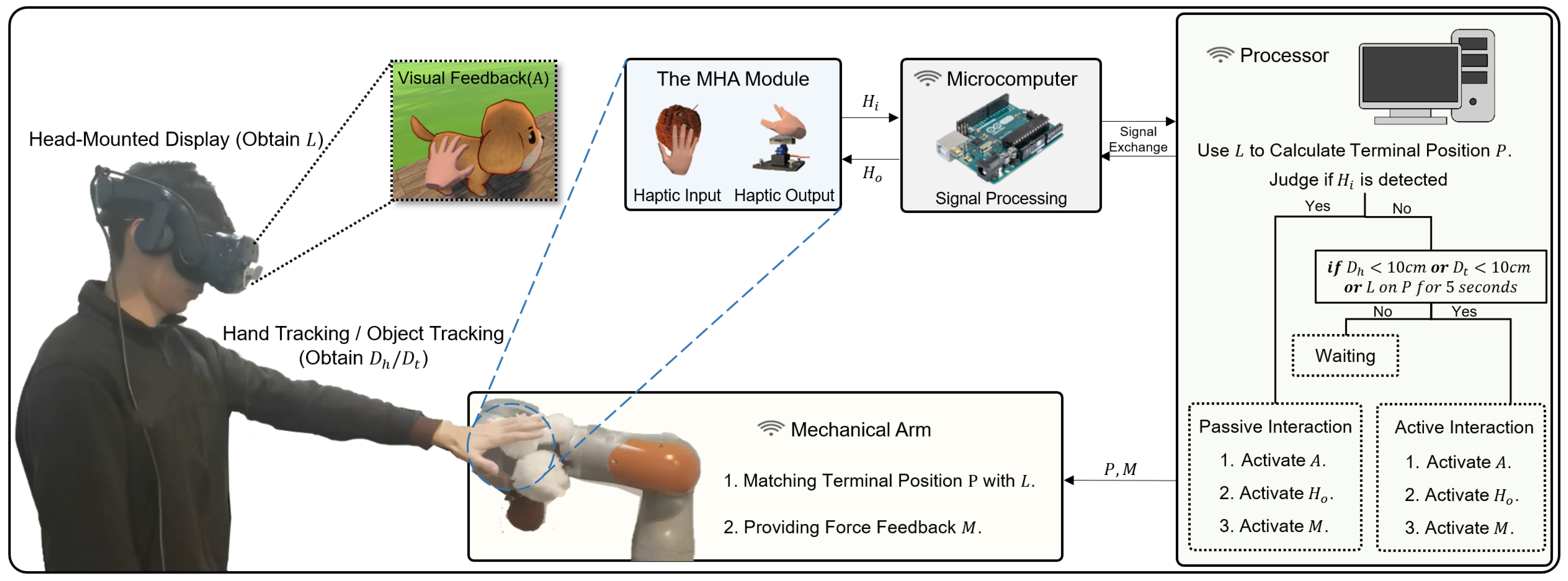
4.1. Overview
4.2. Module Design
4.2.1. Module Core
4.2.2. Detachable Patches and Props
4.3. Tracking System
4.4. Encountered-Type Haptic Interaction
4.5. Software
| Algorithm 1 MHA system control algorithm. |
|
5. System Evaluation and User Study
5.1. Participants
5.2. Apparatus and Materials
5.3. Questionnaire
5.4. Study 1: Module Design Method and Mapping Method
5.4.1. Experiment Design and Procedure
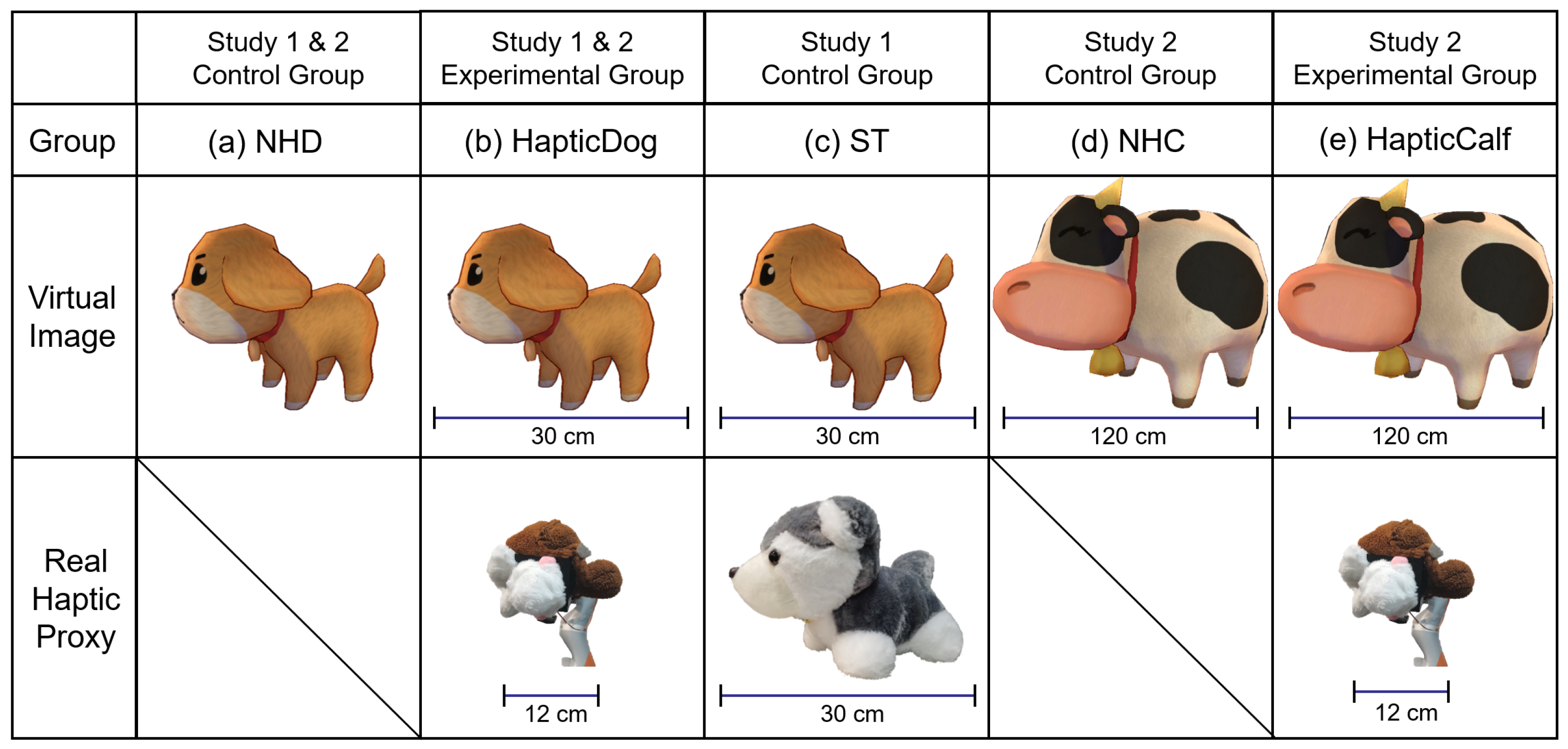
- NHD group (none haptic dog): Participants could see the pet dog but could not touch it (see Figure 7a). When their virtual hands collided with the virtual dog, the virtual dog provided animation feedback.
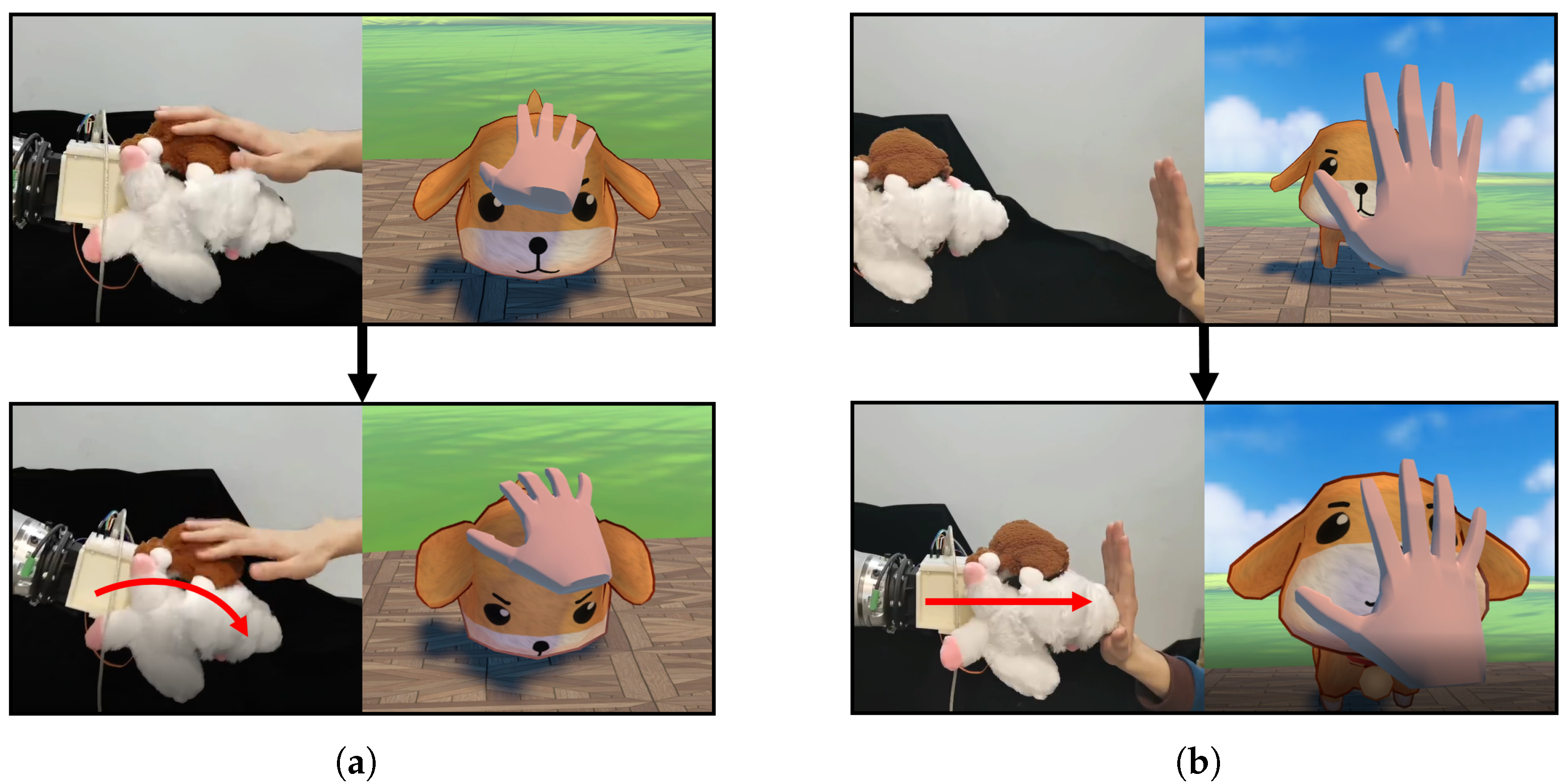
- HapticDog group (MHA haptic dog): We designed the module in advance and planned the path of the mechanical arm (see Figure 7b). When a user looked at different positions of the dog, the mechanical arm drove the module to move to the corresponding positions of the virtual dog. When their virtual hands touched the virtual dog, the dog provided animation feedback.
- ST group (stuffed toy): We prepared a plush toy dog similar in shape and size to the virtual image (see Figure 7c), which could be regarded as a 1:1 haptic proxy of the virtual dog based on previous research [77]. The size and shape of the stuffed toy were identical to those of the avatar. Therefore, it was only necessary to position the stuffed toy in the corresponding location.
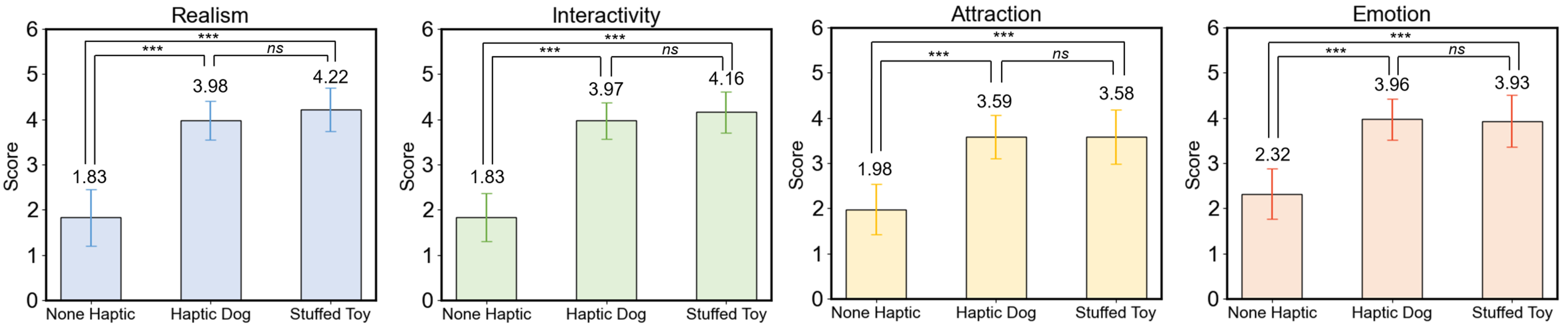
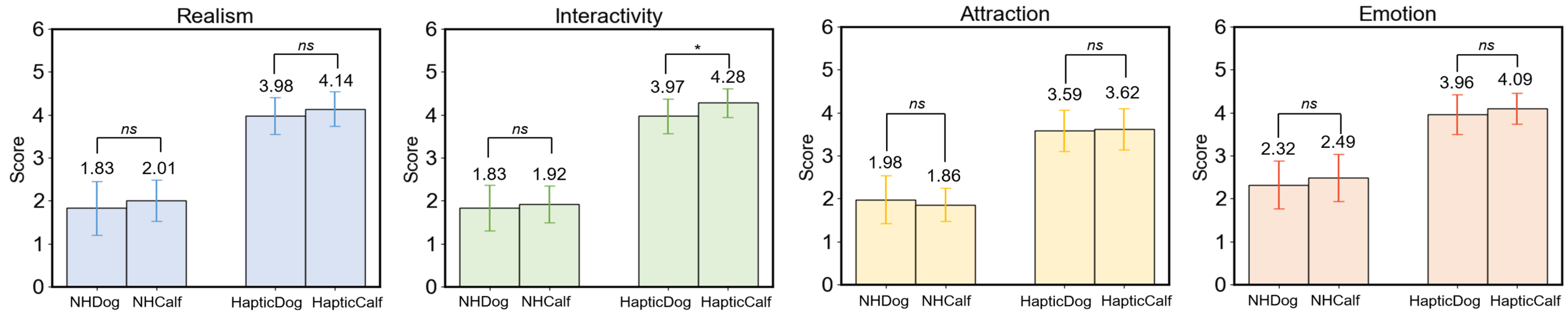
5.4.2. Results
5.4.3. Results Discussion
5.5. Study 2: Simulation of Different Pets
5.5.1. Experiment Design and Procedure
- NHC group (none haptic calf): Participants could see the pet cow but could not touch it (see Figure 7d). When their virtual hands collided with the virtual calf, the calf provided animation feedback.
- HapticCalf group (MHA haptic calf): We reassembled the module and planned the path of the mechanical arm (see Figure 7e). When a user looked at different positions of the calf, the mechanical arm drove the module to move to the corresponding positions of the virtual calf. When their virtual hands touched the virtual calf, the calf provided animation feedback.
5.5.2. Results
5.5.3. Results Discussion
5.6. Study 3: Passive Interaction and Active Interaction
5.6.1. Experiment Design and Procedure
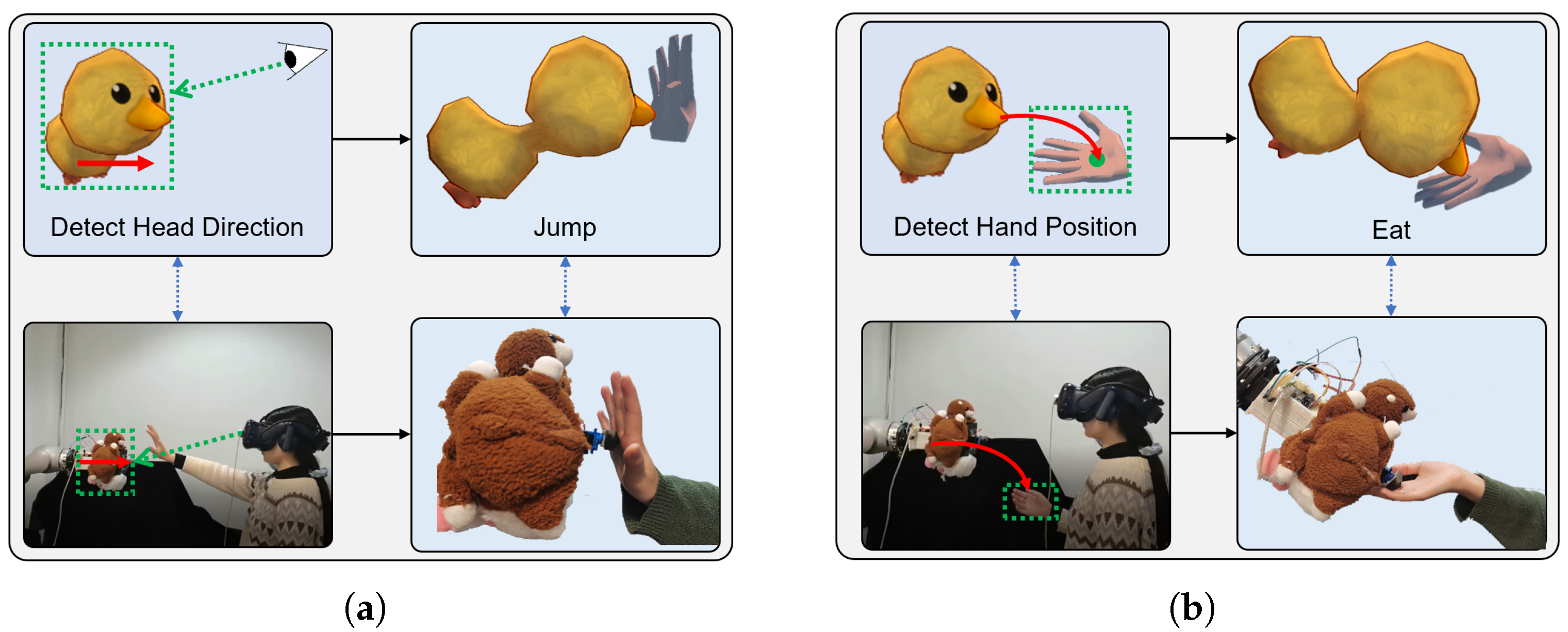
- NF group (no feedback): When a participant touched different parts of the virtual duck, it responded to the user’s touch with only animation feedback.
- PF group (passive feedback): When a participant touched different parts of the virtual duck, the mechanical arm drove the module to generate different animation feedback and force feedback for the participant.
- AF group (active feedback): When the hands of a participant approached different parts around the virtual duck or the participant’s head oriented towards the virtual duck for 5 s, the mechanical arm drove the module to generate different animation feedback and force feedback for the participant.
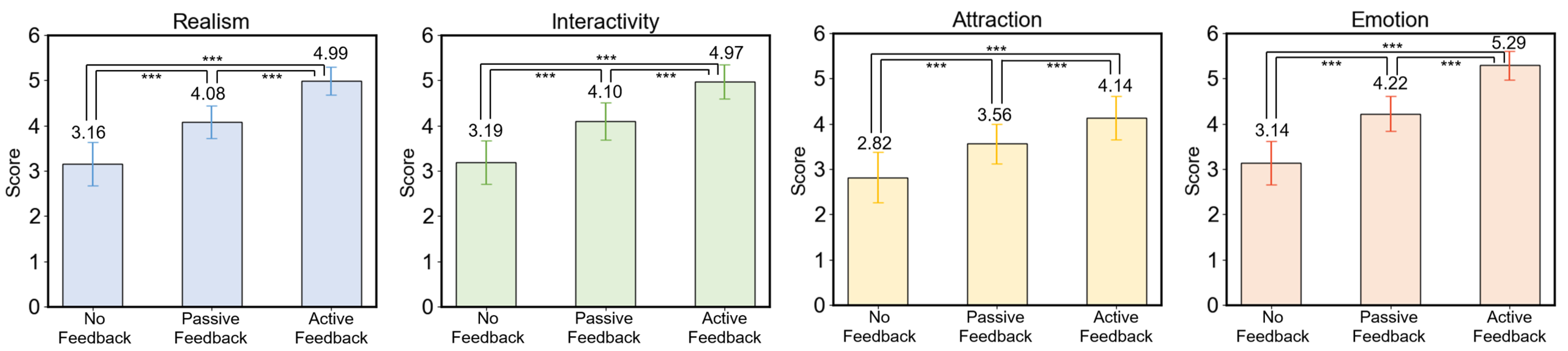
5.6.2. Results
5.6.3. Results Discussion
6. Discussion
6.1. Further Analysis
6.2. Limitations and Future Work
7. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| MHA | Modular Haptic Agent |
| VR | Virtual Reality |
Appendix A. System Evaluation Questionaire
References
- Guo, J.; Weng, D.; Zhang, Z.; Jiang, H.; Liu, Y.; Wang, Y.; Duh, H.B.L. Mixed reality office system based on maslow’s hierarchy of needs: Towards the long-term immersion in virtual environments. In Proceedings of the 2019 IEEE International Symposium on Mixed and Augmented Reality (ISMAR), Beijing, China, 14–18 October 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 224–235. [Google Scholar]
- Chesney, T.; Lawson, S. The illusion of love: Does a virtual pet provide the same companionship as a real one? Interact. Stud. 2007, 8, 337–342. [Google Scholar] [CrossRef]
- Freeman, G.; Zamanifard, S.; Maloney, D.; Adkins, A. My body, my avatar: How people perceive their avatars in social virtual reality. In Proceedings of the Extended Abstracts of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020; pp. 1–8. [Google Scholar]
- Lee, M.; Norouzi, N.; Bruder, G.; Wisniewski, P.J.; Welch, G.F. The physical-virtual table: Exploring the effects of a virtual human’s physical influence on social interaction. In Proceedings of the 24th ACM Symposium on Virtual Reality Software and Technology, Tokyo, Japan, 28 November–1 December 2018; pp. 1–11. [Google Scholar]
- Liang, W.; Yu, X.; Alghofaili, R.; Lang, Y.; Yu, L.F. Scene-aware behavior synthesis for virtual pets in mixed reality. In Proceedings of the 2021 CHI Conference on Human Factors in Computing Systems, Yokohama, Japan, 8–13 May 2021; pp. 1–12. [Google Scholar]
- Hieida, C.; Nagai, T. Survey and perspective on social emotions in robotics. Adv. Robot. 2022, 36, 17–32. [Google Scholar] [CrossRef]
- Bylieva, D.; Almazova, N.; Lobatyuk, V.; Rubtsova, A. Virtual pet: Trends of development. In Proceedings of the 2018 International Conference on Digital Science, Manila City, Philippines, 8–9 November 2018; Springer: Berlin/Heidelberg, Germany, 2019; pp. 545–554. [Google Scholar]
- Bloch, L.R.; Lemish, D. Disposable love: The rise and fall of a virtual pet. New Media Soc. 1999, 1, 283–303. [Google Scholar] [CrossRef]
- Veevers, J.E. The social meanings of pets: Alternative roles for companion animals. In Pets and the Family; Routledge: Oxfordshire, UK, 2016; pp. 11–30. [Google Scholar]
- Murata, K.; Usui, K.; Shibuya, Y. Effect of haptic perception on remote human–pet interaction. In Proceedings of the International Conference on Human Interface and the Management of Information, Heraklion, Greece, 22–27 June 2014; Springer,: Berlin/Heidelberg, Germany, 2014; pp. 226–232. [Google Scholar]
- Bouzbib, E.; Bailly, G.; Haliyo, S.; Frey, P. “Can I Touch This?”: Survey of Virtual Reality Interactions via Haptic Solutions: Revue de Littérature Des Interactions En Réalité Virtuelle Par Le Biais de Solutions Haptiques. In Proceedings of the 32nd Conference on l’Interaction Homme-Machine, Virtual Event, 13–16 April 2021; Association for Computing Machinery: New York, NY, USA, 2022. IHM ’21. [Google Scholar] [CrossRef]
- Suzuki, R.; Ofek, E.; Sinclair, M.; Leithinger, D.; Gonzalez-Franco, M. HapticBots: Distributed Encountered-type Haptics for VR with Multiple Shape-changing Mobile Robots. In Proceedings of the 34th Annual ACM Symposium on User Interface Software and Technology, Virtual Event, 10–14 October 2021; pp. 1269–1281. [Google Scholar]
- Calvert, M.M. Human-pet interaction and loneliness: A test of concepts from Roy’s adaptation model. Nurs. Sci. Q. 1989, 2, 194–202. [Google Scholar] [CrossRef]
- O’Haire, M. Companion animals and human health: Benefits, challenges, and the road ahead. J. Vet. Behav. 2010, 5, 226–234. [Google Scholar] [CrossRef]
- Lee, C.J.; Tsai, H.R.; Chen, B.Y. HairTouch: Providing Stiffness, Roughness and Surface Height Differences Using Reconfigurable Brush Hairs on a VR Controller. In Proceedings of the 2021 CHI Conference on Human Factors in Computing Systems, Yokohama, Japan, 8–13 May 2021; pp. 1–13. [Google Scholar]
- Lee, S.P.; Cheok, A.D.; James, T.K.S.; Debra, G.P.L.; Jie, C.W.; Chuang, W.; Farbiz, F. A mobile pet wearable computer and mixed reality system for human–poultry interaction through the internet. Pers. Ubiquitous Comput. 2006, 10, 301–317. [Google Scholar] [CrossRef]
- Beck, A.M.; Katcher, A.H. Future directions in human-animal bond research. Am. Behav. Sci. 2003, 47, 79–93. [Google Scholar] [CrossRef]
- Giaquinto, S.; Valentini, F. Is there a scientific basis for pet therapy? Disabil. Rehabil. 2009, 31, 595–598. [Google Scholar] [CrossRef]
- Wilson, C.C.; Barker, S.B. Challenges in designing human-animal interaction research. Am. Behav. Sci. 2003, 47, 16–28. [Google Scholar] [CrossRef]
- Stanton, C.M.; Kahn, P.H.; Severson, R.L.; Ruckert, J.H.; Gill, B.T. Robotic animals might aid in the social development of children with autism. In Proceedings of the 2008 3rd ACM/IEEE International Conference on Human-Robot Interaction (HRI), Amsterdam, The Netherlands, 12–15 March 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 271–278. [Google Scholar]
- Lee, H.R.; Panont, W.R.; Plattenburg, B.; Croix, J.P.D.L.; Patharachalam, D. Asthmon: Empowering asthmatic children’s self-management with a virtual pet. In Proceedings of the International Conference on Human Factors in Computing Systems, Atlanta, GA, USA, 10–15 April 2010. [Google Scholar]
- Chahyana, J.; Yesmaya, V. Virtual Pet Simulator Game Using Augmented Reality on Android Platform. J. Phys. Conf. Ser. 2020, 1566, 012088. [Google Scholar] [CrossRef]
- Min, D.A.; Kim, Y.; Jang, S.A.; Kim, K.Y.; Jung, S.E.; Lee, J.H. Pretty pelvis: A virtual pet application that breaks sedentary time by promoting gestural interaction. In Proceedings of the 33rd Annual ACM Conference Extended Abstracts on Human Factors in Computing Systems, Seoul, Republic of Korea, 18–23 April 2015; pp. 1259–1264. [Google Scholar]
- Teyssier, M.; Bailly, G.; Pelachaud, C.; Lecolinet, E. Mobilimb: Augmenting mobile devices with a robotic limb. In Proceedings of the 31st Annual ACM Symposium on User Interface Software and Technology, Berlin, Germany, 14–17 October 2018; pp. 53–63. [Google Scholar]
- Cheok, A.D.; Tan, R.T.K.C.; Peiris, R.L.; Fernando, O.N.N.; Soon, J.T.K.; Wijesena, I.J.P.; Sen, J.Y.P. Metazoa ludens: Mixed-reality interaction and play for small pets and humans. IEEE Trans. Syst. Man, Cybern.-Part A Syst. Hum. 2011, 41, 876–891. [Google Scholar] [CrossRef]
- Kaplan, F.; Oudeyer, P.Y.; Kubinyi, E.; Miklósi, A. Robotic clicker training. Robot. Auton. Syst. 2002, 38, 197–206. [Google Scholar] [CrossRef]
- Goris, K.; Saldien, J.; Vanderniepen, I.; Lefeber, D. The huggable robot probo, a multi-disciplinary research platform. In Proceedings of the International Conference on Research and Education in Robotics, Kuala Lumpur, Malaysia, 12–15 December 2018; Springer: Berlin/Heidelberg, Germany, 2008; pp. 29–41. [Google Scholar]
- van Breemen, A.; Yan, X.; Meerbeek, B. iCat: An animated user-interface robot with personality. In Proceedings of the Fourth International Joint Conference on Autonomous Agents and Multiagent Systems, Utrecht, The Netherlands, 25–29 July 2005; pp. 143–144. [Google Scholar]
- Burdea, G.C. Force and Touch Feedback for Virtual Reality; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1996. [Google Scholar]
- McNeely, W.A. Robotic graphics: A new approach to force feedback for virtual reality. In Proceedings of the IEEE Virtual Reality Annual International Symposium, Seattle, WA, USA, 18–22 September 1993; IEEE: Piscataway, NJ, USA, 1993; pp. 336–341. [Google Scholar]
- Hayward, V.; Astley, O.R.; Cruz-Hernandez, M.; Grant, D.; Robles-De-La-Torre, G. Haptic interfaces and devices. Sens. Rev. 2004, 24, 16–29. [Google Scholar] [CrossRef]
- Bouzbib, E.; Bailly, G. “Let’s Meet and Work it Out”: Understanding and Mitigating Encountered-Type of Haptic Devices Failure Modes in VR. In Proceedings of the 2022 IEEE Conference on Virtual Reality and 3D User Interfaces (VR), Christchurch, New Zealand, 12–16 March 2022; pp. 360–369. [Google Scholar] [CrossRef]
- Mercado, V.R.; Marchal, M.; Lecuyer, A. “Haptics On-Demand”: A Survey on Encountered-Type Haptic Displays. IEEE Trans. Haptics 2021, 14, 449–464. [Google Scholar] [CrossRef] [PubMed]
- Wagner, C.R.; Lederman, S.J.; Howe, R.D. A tactile shape display using RC servomotors. In Proceedings of the 10th Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, Orlando, FL, USA, 24–25 March 2002; HAPTICS 2002. IEEE: Piscataway, NJ, USA, 2002; pp. 354–355. [Google Scholar]
- Araujo, B.; Jota, R.; Perumal, V.; Yao, J.X.; Singh, K.; Wigdor, D. Snake charmer: Physically enabling virtual objects. In Proceedings of the TEI’16: Tenth International Conference on Tangible, Embedded, and Embodied Interaction, Eindhoven, The Netherlands, 14–17 February 2016; pp. 218–226. [Google Scholar]
- Yamagami, M.; Junuzovic, S.; Gonzalez-Franco, M.; Ofek, E.; Cutrell, E.; Porter, J.; Wilson, A.; Mott, M. Two-In-One: A Design Space for Mapping Unimanual Input into Bimanual Interactions in VR for Users with Limited Movement. arXiv 2021, arXiv:2108.12390. [Google Scholar] [CrossRef]
- Bouzbib, E.; Bailly, G.; Haliyo, S.; Frey, P. CoVR: A Large-Scale Force-Feedback Robotic Interface for Non-Deterministic Scenarios in VR. In Proceedings of the 33rd Annual ACM Symposium on User Interface Software and Technology, Virtual Event, 20–23 October 2020; Association for Computing Machinery: New York, NY, USA, 2020. UIST ’20. pp. 209–222. [Google Scholar] [CrossRef]
- Zhao, Y.; Kim, L.H.; Wang, Y.; Le Goc, M.; Follmer, S. Robotic assembly of haptic proxy objects for tangible interaction and virtual reality. In Proceedings of the 2017 ACM International Conference on Interactive Surfaces and Spaces, Brighton, UK, 17–20 October 2017; pp. 82–91. [Google Scholar]
- Cheng, L.P.; Chang, L.; Marwecki, S.; Baudisch, P. iturk: Turning passive haptics into active haptics by making users reconfigure props in virtual reality. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 21–26 April 2018; pp. 1–10. [Google Scholar]
- Dominjon, L.; Lécuyer, A.; Burkhardt, J.M.; Richard, P.; Richir, S. Influence of control/display ratio on the perception of mass of manipulated objects in virtual environments. In Proceedings of the IEEE Proceedings, VR 2005. Virtual Reality, Bonn, Germany, 12–16 March 2005; IEEE: Piscataway, NJ, USA, 2005; pp. 19–25. [Google Scholar]
- Rietzler, M.; Geiselhart, F.; Gugenheimer, J.; Rukzio, E. Breaking the tracking: Enabling weight perception using perceivable tracking offsets. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 21–26 April 2018; pp. 1–12. [Google Scholar]
- Suzuki, R.; Hedayati, H.; Zheng, C.; Bohn, J.L.; Szafir, D.; Do, E.Y.L.; Gross, M.D.; Leithinger, D. Roomshift: Room-scale dynamic haptics for vr with furniture-moving swarm robots. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020; pp. 1–11. [Google Scholar]
- Cheng, L.P.; Marwecki, S.; Baudisch, P. Mutual human actuation. In Proceedings of the 30th Annual ACM Symposium on User Interface Software and Technology, Quebec City, QC, Canada, 22–25 October 2017; pp. 797–805. [Google Scholar]
- Cheng, L.P.; Roumen, T.; Rantzsch, H.; Köhler, S.; Schmidt, P.; Kovacs, R.; Jasper, J.; Kemper, J.; Baudisch, P. Turkdeck: Physical virtual reality based on people. In Proceedings of the 28th Annual ACM Symposium on User Interface Software & Technology, Charlotte, NC, USA, 11–15 November 2015; pp. 417–426. [Google Scholar]
- Huang, H.Y.; Ning, C.W.; Wang, P.Y.; Cheng, J.H.; Cheng, L.P. Haptic-go-round: A surrounding platform for encounter-type haptics in virtual reality experiences. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020; pp. 1–10. [Google Scholar]
- Hoppe, M.; Knierim, P.; Kosch, T.; Funk, M.; Futami, L.; Schneegass, S.; Henze, N.; Schmidt, A.; Machulla, T. VRHapticDrones: Providing haptics in virtual reality through quadcopters. In Proceedings of the 17th International Conference on Mobile and Ubiquitous Multimedia, Cairo, Egypt, 25–28 November 2018; pp. 7–18. [Google Scholar]
- Abtahi, P.; Landry, B.; Yang, J.; Pavone, M.; Follmer, S.; Landay, J.A. Beyond the force: Using quadcopters to appropriate objects and the environment for haptics in virtual reality. In Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems, Glasgow, UK, 4–9 May 2019; pp. 1–13. [Google Scholar]
- Yamaguchi, K.; Kato, G.; Kuroda, Y.; Kiyokawa, K.; Takemura, H. A Non-grounded and Encountered-type Haptic Display Using a Drone. In Proceedings of the ACM Spatial User Interaction (SUI ’16), Tokyo, Japan, 15–16 October 2016. [Google Scholar]
- Romanishin, J.W.; Gilpin, K.; Rus, D. M-blocks: Momentum-driven, magnetic modular robots. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 4288–4295. [Google Scholar]
- Xue, Y.; Weng, D.; Jiang, H.; Gao, Q. MMRPet: Modular Mixed Reality Pet System Based on Passive Props. In Proceedings of the Chinese Conference on Image and Graphics Technologies, Beijing, China, 23–25 April 2019; Springer: Berlin/Heidelberg, Germany, 2019; pp. 645–658. [Google Scholar]
- Zhao, L.; Liu, Y.; Song, W. Tactile Perceptual Thresholds of Electrovibration in VR. IEEE Trans. Vis. Comput. Graph. 2021, 27, 2618–2626. [Google Scholar] [CrossRef]
- Ujitoko, Y.; Ban, Y.; Hirota, K. Modulating fine roughness perception of vibrotactile textured surface using pseudo-haptic effect. IEEE Trans. Vis. Comput. Graph. 2019, 25, 1981–1990. [Google Scholar] [CrossRef] [PubMed]
- Yu, R.; Bowman, D.A. Pseudo-haptic display of mass and mass distribution during object rotation in virtual reality. IEEE Trans. Vis. Comput. Graph. 2020, 26, 2094–2103. [Google Scholar] [CrossRef]
- Wuillemin, D.; van Doorn, G.; Richardson, B.; Symmons, M. Haptic and visual size judgements in virtual and real environments. In Proceedings of the First Joint Eurohaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, World Haptics Conference, Pisa, Italy, 18–20 March 2005; IEEE: Piscataway, NJ, USA, 2005; pp. 86–89. [Google Scholar]
- Ebrahimi, E.; Babu, S.V.; Pagano, C.C.; Jörg, S. An empirical evaluation of visuo-haptic feedback on physical reaching behaviors during 3D interaction in real and immersive virtual environments. ACM Trans. Appl. Percept. (TAP) 2016, 13, 1–21. [Google Scholar] [CrossRef]
- Azmandian, M.; Hancock, M.; Benko, H.; Ofek, E.; Wilson, A.D. Haptic retargeting: Dynamic repurposing of passive haptics for enhanced virtual reality experiences. In Proceedings of the 2016 chi Conference on Human Factors in Computing Systems, San Jose, CA, USA, 7–12 May 2016; pp. 1968–1979. [Google Scholar]
- Suzuki, R.; Karim, A.; Xia, T.; Hedayati, H.; Marquardt, N. Augmented Reality and Robotics: A Survey and Taxonomy for AR-enhanced Human-Robot Interaction and Robotic Interfaces. In Proceedings of the 2022 CHI Conference on Human Factors in Computing Systems, Orleans, LA, USA, 29 April–5 May 2022; pp. 1–32. [Google Scholar]
- Watanabe, A.; Ikeda, T.; Morales, Y.; Shinozawa, K.; Miyashita, T.; Hagita, N. Communicating robotic navigational intentions. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–3 October 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 5763–5769. [Google Scholar]
- Ostanin, M.; Klimchik, A. Interactive robot programing using mixed reality. IFAC-PapersOnLine 2018, 51, 50–55. [Google Scholar] [CrossRef]
- Quintero, C.P.; Li, S.; Pan, M.K.; Chan, W.P.; Van der Loos, H.M.; Croft, E. Robot programming through augmented trajectories in augmented reality. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1838–1844. [Google Scholar]
- Yuan, L.; Reardon, C.; Warnell, G.; Loianno, G. Human gaze-driven spatial tasking of an autonomous MAV. IEEE Robot. Autom. Lett. 2019, 4, 1343–1350. [Google Scholar] [CrossRef]
- Muhammad, F.; Hassan, A.; Cleaver, A.; Sinapov, J. Creating a shared reality with robots. In Proceedings of the 2019 14th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Daegu, Republic of Korea, 11–14 March 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 614–615. [Google Scholar]
- Ostanin, M.; Mikhel, S.; Evlampiev, A.; Skvortsova, V.; Klimchik, A. Human-robot interaction for robotic manipulator programming in Mixed Reality. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 2805–2811. [Google Scholar]
- Siu, A.F.; Yuan, S.; Pham, H.; Gonzalez, E.; Kim, L.H.; Le Goc, M.; Follmer, S. Investigating tangible collaboration for design towards augmented physical telepresence. In Design Thinking Research; Springer: Berlin/Heidelberg, Germany, 2018; pp. 131–145. [Google Scholar]
- Qian, L.; Deguet, A.; Wang, Z.; Liu, Y.H.; Kazanzides, P. Augmented reality assisted instrument insertion and tool manipulation for the first assistant in robotic surgery. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 5173–5179. [Google Scholar]
- Jones, B.; Zhang, Y.; Wong, P.N.; Rintel, S. Vroom: Virtual robot overlay for online meetings. In Proceedings of the Extended Abstracts of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020; pp. 1–10. [Google Scholar]
- Bednarik, R.; Vrzakova, H.; Hradis, M. What do you want to do next: A novel approach for intent prediction in gaze-based interaction. In Proceedings of the Symposium on Eye Tracking Research and Applications, Barbara, CA, USA, 28–30 March 2012; pp. 83–90. [Google Scholar]
- Pfeuffer, K.; Alexander, J.; Chong, M.K.; Gellersen, H. Gaze-touch: Combining gaze with multi-touch for interaction on the same surface. In Proceedings of the 27th Annual ACM Symposium on User Interface Software and Technology, Honolulu, HI, USA, 5–8 October 2014; pp. 509–518. [Google Scholar]
- Stellmach, S.; Dachselt, R. Look & touch: Gaze-supported target acquisition. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Austin, TX, USA, 5–10 May 2012; pp. 2981–2990. [Google Scholar]
- Rossano, F. 15 Gaze in Conversation. InThe Handbook of Conversation Analysis; John Wiley & Sons: Hoboken, NJ, USA, 2012; p. 308. [Google Scholar]
- Miniotas, D.; Špakov, O.; MacKenzie, I.S. Eye gaze interaction with expanding targets. In Proceedings of the CHI’04 Extended Abstracts on Human Factors in Computing Systems, Vienna, Austria, 24–29 April 2004; pp. 1255–1258. [Google Scholar]
- Boschma, R. Role of proximity in interaction and performance: Conceptual and empirical challenges. Regional Studies. 2005, 39, 41–45. [Google Scholar] [CrossRef]
- Araujo, T. Living up to the chatbot hype: The influence of anthropomorphic design cues and communicative agency framing on conversational agent and company perceptions. Comput. Hum. Behav. 2018, 85, 183–189. [Google Scholar] [CrossRef]
- Crawford, J.R.; Henry, J.D. The Positive and Negative Affect Schedule (PANAS): Construct validity, measurement properties and normative data in a large non-clinical sample. Br. J. Clin. Psychol. 2004, 43, 245–265. [Google Scholar] [CrossRef]
- Schrepp, M.; Hinderks, A.; Thomaschewski, J. Applying the user experience questionnaire (UEQ) in different evaluation scenarios. In Proceedings of the International Conference of Design, User Experience, and Usability, Heraklion, Greece, 22–27 June 2014; Springer: Berlin/Heidelberg, Germany, 2014; pp. 383–392. [Google Scholar]
- Lombard, M.; Ditton, T. At the heart of it all: The concept of presence. J. Comput.-Mediat. Commun. 1997, 3, JCMC321. [Google Scholar] [CrossRef]
- Cheng, L.P.; Ofek, E.; Holz, C.; Benko, H.; Wilson, A.D. Sparse haptic proxy: Touch feedback in virtual environments using a general passive prop. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems, Denver, CO, USA, 6–11 May 2017; pp. 3718–3728. [Google Scholar]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dongye, X.; Weng, D.; Jiang, H.; Feng, L. A Modular Haptic Agent System with Encountered-Type Active Interaction. Electronics 2023, 12, 2069. https://doi.org/10.3390/electronics12092069
Dongye X, Weng D, Jiang H, Feng L. A Modular Haptic Agent System with Encountered-Type Active Interaction. Electronics. 2023; 12(9):2069. https://doi.org/10.3390/electronics12092069
Chicago/Turabian StyleDongye, Xiaonuo, Dongdong Weng, Haiyan Jiang, and Lulu Feng. 2023. "A Modular Haptic Agent System with Encountered-Type Active Interaction" Electronics 12, no. 9: 2069. https://doi.org/10.3390/electronics12092069