


Sum Rate Optimization for Multiple Access in Multi-FD-UAV-Assisted NOMA-Enabled Backscatter Communication Network

Abstract
:
1. Introduction
1.1. Overview and Motivation
1.2. Paper Contribution
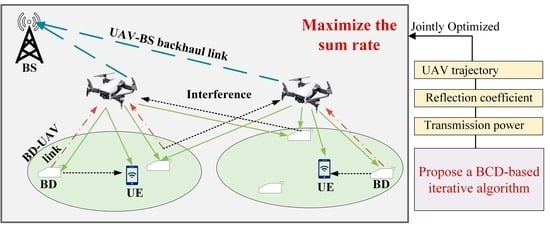
- We consider a multi-FD-UAV-assisted NOMA-enabled backscatter communication network, where multiple FD-UAVs are deployed to cooperate to serve the ground BDs with the NOMA scheme while communicating with the downlink UE. Then, the UAVs forward back the data of BDs to a nearby BS through the OMA scheme. To maximize the sum rate of BDs under the considered system, we formulate a sum rate maximization problem to jointly optimize the reflection coefficient of BDs, the downlink and the backhaul transmission power, and the trajectory of UAVs with constraints such as the successive interference cancellation (SIC) decoding constraints and the backhaul capacity constraint.
- Due to the non-convexity of the constructed problem, we split the original problem into three sub-problems, that is, the BD reflection coefficient optimization problem, the UAV transmission power optimization problem, and the UAV trajectory optimization problem. Then we apply the successive convex approximation (SCA) method to solve each sub-problem. Based on the solution of each sub-problem, we propose a block coordinate descent (BCD)-based iterative algorithm to solve the original problem. Furthermore, the convergence and complexity of the proposed algorithm are also proven.
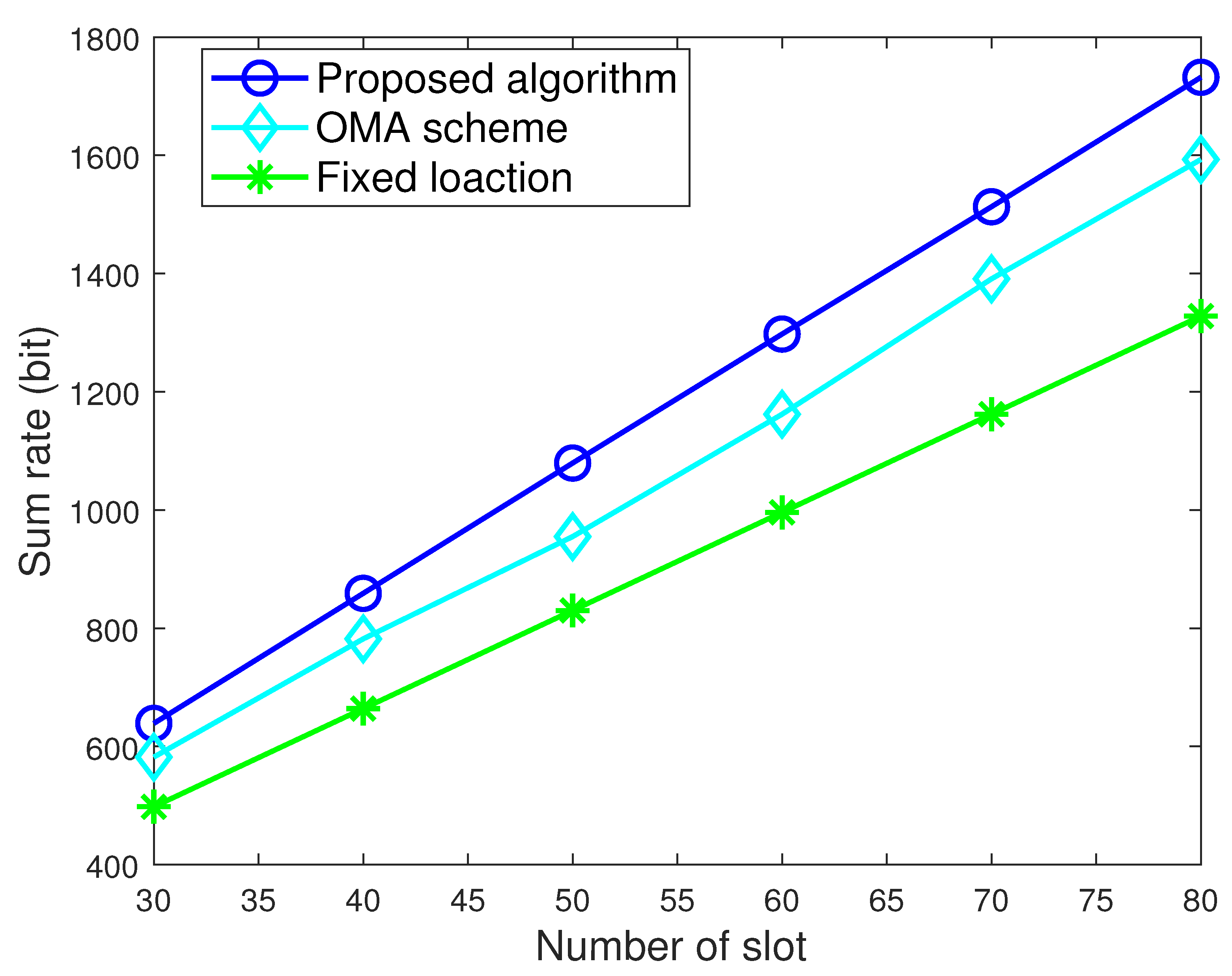
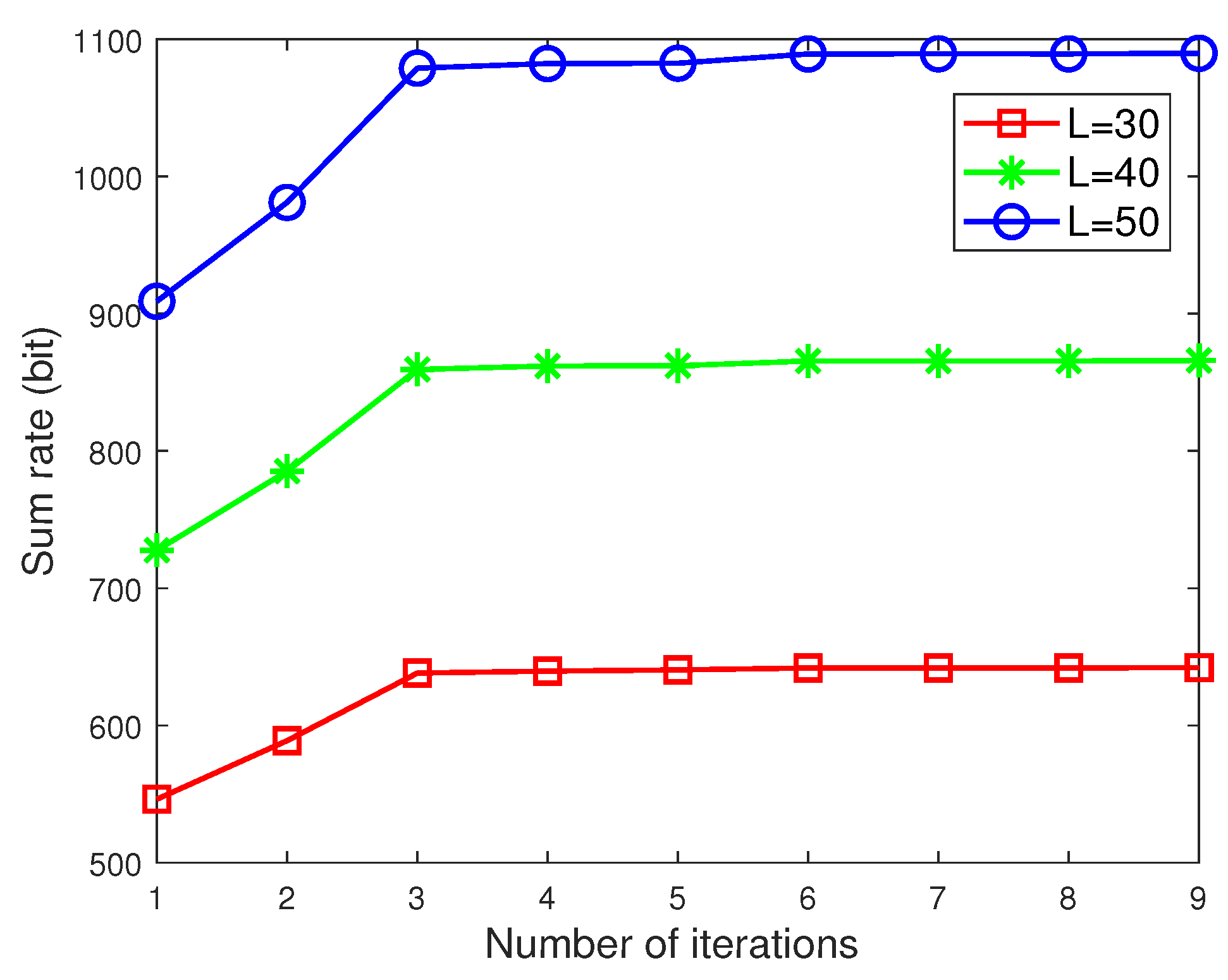
- To verify the effectiveness of the proposed algorithm, we provide extensive numerical results. The numerical results show that the proposed algorithm outperforms the two benchmark schemes, and the fast convergence of the proposed algorithm is also verified.
1.3. Paper Organization
2. System Model
2.1. UAV-BD Link Transmission Model
2.2. UAV-UE Link Transmission Model
2.3. UAV-BS Link Transmission Model
2.4. Problem Formulation
3. Proposed Algorithm for Sum Rate Maximization
3.1. Reflection Coefficients Optimization
3.2. UAV Transmission Power Optimization
3.3. Trajectory Optimization
3.4. Proposed Algorithm for Problem (P1)
| Algorithm 1 BCD-based iterative algorithm |
|
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| BackCom | Backscatter communication |
| CE | Carrier emitter |
| BD | Backscatter device |
| UAV | unmanned-aerial-vehicle |
| OMA | Orthogonal multiple access |
| NOMA | Non-orthogonal multiple access |
| BCD | Block coordinate descent |
| SCA | Successive convex approximation |
References
- Giordani, M.; Polese, M.; Mezzavilla, M.; Rangan, S.; Zorzi, M. Toward 6G Networks: Use Cases and Technologies. IEEE Commun. Mag. 2020, 58, 55–61. [Google Scholar] [CrossRef]
- Pan, J.; Ye, N.; Yu, H.; Hong, T.; Al-Rubaye, S.; Mumtaz, S.; Al-Dulaimi, A.; Chih-Lin, I. AI-Driven Blind Signature Classification for IoT Connectivity: A Deep Learning Approach. IEEE Trans. Wirel. Commun. 2022, 21, 6033–6047. [Google Scholar] [CrossRef]
- Ye, N.; Yu, J.; Wang, A.; Zhang, R. Help from space: Grant-free massive access for satellite-based IoT in the 6G era. Digit. Commun. Netw. 2022, 8, 215–224. [Google Scholar] [CrossRef]
- Lu, X.; Niyato, D.; Jiang, H.; Kim, D.I.; Xiao, Y.; Han, Z. Ambient Backscatter Assisted Wireless Powered Communications. IEEE Wirel. Commun. 2018, 25, 170–177. [Google Scholar] [CrossRef]
- Darsena, D.; Gelli, G.; Verde, F. Modeling and Performance Analysis of Wireless Networks With Ambient Backscatter Devices. IEEE Trans. Commun. 2017, 65, 1797–1814. [Google Scholar] [CrossRef]
- Van Huynh, N.; Hoang, D.T.; Lu, X.; Niyato, D.; Wang, P.; Kim, D.I. Ambient Backscatter Communications: A Contemporary Survey. IEEE Commun. Surv. Tutor. 2018, 20, 2889–2922. [Google Scholar] [CrossRef] [Green Version]
- Memon, M.L.; Saxena, N.; Roy, A.; Shin, D.R. Backscatter Communications: Inception of the Battery-Free Era—A Comprehensive Survey. Electronics 2019, 8, 129. [Google Scholar] [CrossRef] [Green Version]
- Zhou, S.; Xu, W.; Wang, K.; Pan, C.; Alouini, M.; Nallanathan, A. Ergodic Rate Analysis of Cooperative Ambient Backscatter Communication. IEEE Wirel. Commun. Lett. 2019, 8, 1679–1682. [Google Scholar] [CrossRef] [Green Version]
- Ye, Y.; Shi, L.; Chu, X.; Lu, G. On the Outage Performance of Ambient Backscatter Communications. IEEE Internet Things J. 2020, 7, 7265–7278. [Google Scholar] [CrossRef]
- Han, D.; Minn, H. Coverage Probability Analysis Under Clustered Ambient Backscatter Nodes. IEEE Wirel. Commun. Lett. 2019, 8, 1713–1717. [Google Scholar] [CrossRef] [Green Version]
- Van Huynh, N.; Hoang, D.T.; Niyato, D.; Wang, P.; Kim, D.I. Optimal Time Scheduling for Wireless-Powered Backscatter Communication Networks. IEEE Wirel. Commun. Lett. 2018, 7, 820–823. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.J.; Xu, K.; Yan, Y.; Chen, L. Relay Selection-Based Cooperative Backscatter Transmission With Energy Harvesting: Throughput Maximization. IEEE Wirel. Commun. Lett. 2022, 11, 1533–1537. [Google Scholar] [CrossRef]
- Lyu, B.; You, C.; Yang, Z.; Gui, G. The Optimal Control Policy for RF-Powered Backscatter Communication Networks. IEEE Trans. Veh. Technol. 2018, 67, 2804–2808. [Google Scholar] [CrossRef]
- Han, S.; Wang, Z. A Low-Complexity Resource Allocation for Multiple Access Passive IoT System. Electronics 2019, 8, 1421. [Google Scholar] [CrossRef] [Green Version]
- Ye, Y.; Shi, L.; Chu, X.; Lu, G. Throughput Fairness Guarantee in Wireless Powered Backscatter Communications With HTT. IEEE Wirel. Commun. Lett. 2021, 10, 449–453. [Google Scholar] [CrossRef]
- Yang, Z.; Feng, L.; Chang, Z.; Lu, J.; Liu, R.; Kadoch, M.; Cheriet, M. Prioritized Uplink Resource Allocation in Smart Grid Backscatter Communication Networks via Deep Reinforcement Learning. Electronics 2020, 9, 622. [Google Scholar] [CrossRef] [Green Version]
- Li, L.; Huang, X. Promoting Energy Efficiency and Proportional Fairness in Densely Deployed Backscatter-Aided Networks. IEEE Internet Things J. 2021, 8, 10518–10530. [Google Scholar] [CrossRef]
- Yang, H.; Ye, Y.; Chu, X. max–min Energy-Efficient Resource Allocation for Wireless Powered Backscatter Networks. IEEE Wirel. Commun. Lett. 2020, 9, 688–692. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, E.; Zhu, Y.H.; Chi, K.; Tian, X. Energy-Efficient Prefix Code Based Backscatter Communication for Wirelessly Powered Networks. IEEE Wirel. Commun. Lett. 2019, 8, 348–351. [Google Scholar] [CrossRef]
- Liu, J.; Luo, Z.; Yang, G.; Liang, Y.C. Interference-Cancellation Transceiver Design for Long-Range Multistatic Backscatter Communications. In Proceedings of the GLOBECOM 2022–2022 IEEE Global Communications Conference, Rio de Janeiro, Brazil, 4–8 December 2022; pp. 6042–6047. [Google Scholar] [CrossRef]
- Hua, M.; Yang, L.; Li, C.; Wu, Q.; Swindlehurst, A.L. Throughput Maximization for UAV-Aided Backscatter Communication Networks. IEEE Trans. Commun. 2020, 68, 1254–1270. [Google Scholar] [CrossRef] [Green Version]
- Yang, G.; Dai, R.; Liang, Y.C. Energy-Efficient UAV Backscatter Communication With Joint Trajectory Design and Resource Optimization. IEEE Trans. Wirel. Commun. 2021, 20, 926–941. [Google Scholar] [CrossRef]
- Yang, S.; Deng, Y.; Tang, X.; Ding, Y.; Zhou, J. Energy Efficiency Optimization for UAV-Assisted Backscatter Communications. IEEE Commun. Lett. 2019, 23, 2041–2045. [Google Scholar] [CrossRef] [Green Version]
- Tran, D.H.; Chatzinotas, S.; Ottersten, B. Throughput Maximization for Backscatter- and Cache-Assisted Wireless Powered UAV Technology. IEEE Trans. Veh. Technol. 2022, 71, 5187–5202. [Google Scholar] [CrossRef]
- Hu, J.; Cai, X.; Yang, K. Joint Trajectory and Scheduling Design for UAV Aided Secure Backscatter Communications. IEEE Wirel. Commun. Lett. 2020, 9, 2168–2172. [Google Scholar] [CrossRef]
- Hua, M.; Swindlehurst, A.L.; Li, C.; Yang, L. UAV-Aided Backscatter Networks: Joint UAV Trajectory and Protocol Design. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Farajzadeh, A.; Ercetin, O.; Yanikomeroglu, H. Mobility-Assisted Over-the-Air Computation for Backscatter Sensor Networks. IEEE Wirel. Commun. Lett. 2020, 9, 675–678. [Google Scholar] [CrossRef] [Green Version]
- Nie, Y.; Zhao, J.; Liu, J.; Jiang, J.; Ding, R. Energy-efficient UAV trajectory design for backscatter communication: A deep reinforcement learning approach. China Commun. 2020, 17, 129–141. [Google Scholar] [CrossRef]
- Liu, Q.; Sun, S.; Hou, J.; Jia, H.; Kadoch, M. Resource Allocation in NOMA-Assisted Ambient Backscatter Communication System. Electronics 2021, 10, 3061. [Google Scholar] [CrossRef]
- Yang, G.; Xu, X.; Liang, Y.C. Resource Allocation in NOMA-Enhanced Backscatter Communication Networks for Wireless Powered IoT. IEEE Wirel. Commun. Lett. 2020, 9, 117–120. [Google Scholar] [CrossRef]
- Chen, W.; Ding, H.; Wang, S.; da Costa, D.B.; Gong, F.; Nardelli, P.H.J. Ambient backscatter communications over NOMA downlink channels. China Commun. 2020, 17, 80–100. [Google Scholar] [CrossRef]
- Khan, W.U.; Li, X.; Zeng, M.; Dobre, O.A. Backscatter-Enabled NOMA for Future 6G Systems: A New Optimization Framework Under Imperfect SIC. IEEE Commun. Lett. 2021, 25, 1669–1672. [Google Scholar] [CrossRef]
- Ding, Z.; Poor, H.V. On the Application of BAC-NOMA to 6G umMTC. IEEE Commun. Lett. 2021, 25, 2678–2682. [Google Scholar] [CrossRef]
- Farajzadeh, A.; Ercetin, O.; Yanikomeroglu, H. UAV Data Collection Over NOMA Backscatter Networks: UAV Altitude and Trajectory Optimization. In Proceedings of the ICC 2019–2019 IEEE International Conference on Communications (ICC), Shanghai, China, 20–24 May 2019; pp. 1–7. [Google Scholar] [CrossRef] [Green Version]
- Gan, X.; Jiang, Y.; Wang, Y.; Hong, D.; Wang, Z. Sum Rate Maximization for UAV-assisted NOMA Backscatter Communication System. In Proceedings of the 2023 6th World Conference on Computing and Communication Technologies (WCCCT), Chengdu, China, 6–8 January 2023; pp. 19–23. [Google Scholar] [CrossRef]
- Fan, Z.; Hu, Y.; Wang, Z.; Wan, X.; Duo, B. Sum Rate Optimization for UAV-assisted NOMA-based Backscatter Communication System. In Proceedings of the 2022 27th Asia Pacific Conference on Communications (APCC), Jeju Island, Republic of Korea, 19–21 October 2022; pp. 478–482. [Google Scholar] [CrossRef]
- Liu, V.; Parks, A.N.; Talla, V.; Gollakota, S.; Wetherall, D.J.; Smith, J.R. Ambient backscatter: Wireless communication out of thin air. ACM SIGCOMM Comput. Commun. Rev. 2013, 43, 39–50. [Google Scholar] [CrossRef]
- Wang, N.; Li, F.; Chen, D.; Liu, L.; Bao, Z. NOMA-Based Energy-Efficiency Optimization for UAV Enabled Space-Air-Ground Integrated Relay Networks. IEEE Trans. Veh. Technol. 2022, 71, 4129–4141. [Google Scholar] [CrossRef]
- Ma, T.; Zhou, H.; Qian, B.; Cheng, N.; Shen, X.; Chen, X.; Bai, B. UAV-LEO Integrated Backbone: A Ubiquitous Data Collection Approach for B5G Internet of Remote Things Networks. IEEE J. Sel. Areas Commun. 2021, 39, 3491–3505. [Google Scholar] [CrossRef]
- Ding, Z.; Poor, H.V. Advantages of NOMA for Multi-User BackCom Networks. IEEE Commun. Lett. 2021, 25, 3408–3412. [Google Scholar] [CrossRef]
- Wu, Q.; Zeng, Y.; Zhang, R. Joint Trajectory and Communication Design for Multi-UAV Enabled Wireless Networks. IEEE Trans. Wirel. Commun. 2018, 17, 2109–2121. [Google Scholar] [CrossRef] [Green Version]
- Lu, J.; Wang, Y.; Liu, T.; Zhuang, Z.; Zhou, X.; Shu, F.; Han, Z. UAV-Enabled Uplink Non-Orthogonal Multiple Access System: Joint Deployment and Power Control. IEEE Trans. Veh. Technol. 2020, 69, 10090–10102. [Google Scholar] [CrossRef]
- Liu, X.; Lai, B.; Lin, B.; Leung, V.C.M. Joint Communication and Trajectory Optimization for Multi-UAV Enabled Mobile Internet of Vehicles. IEEE Trans. Intell. Transp. Syst. 2022, 23, 15354–15366. [Google Scholar] [CrossRef]
- Zhan, C.; Hu, H.; Liu, Z.; Wang, Z.; Mao, S. Multi-UAV-Enabled Mobile-Edge Computing for Time-Constrained IoT Applications. IEEE Internet Things J. 2021, 8, 15553–15567. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Number of UAVs U | 2 |
| Number of UEs I | 7 |
| Number of BDs D | 6 |
| Number of slots Q | 40 |
| UAV’s maximum speed | 50 m/s |
| UAV’s maximum transmission power | 2 W |
| Noise power of UAV and the BD | −144 dBm |
| Noise power of UE and the BS | −144 dBm |
| Duration of each slot | 1 s |
| Carrier frequency for downlink | 4 GHz |
| Carrier frequency for backhaul link | 1 GHz |
| Height of UAV | 100 |
| Attenuation coefficient of LoS | 1 dB |
| Attenuation coefficient of NLoS | 20 dB |
| SINR threshold | 0 dB |
| Minimum distance | 5 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Guo, J.; Yu, H.; Zhang, H.; Gong, Y.; Fei, Z. Sum Rate Optimization for Multiple Access in Multi-FD-UAV-Assisted NOMA-Enabled Backscatter Communication Network. Electronics 2023, 12, 1873. https://doi.org/10.3390/electronics12081873
Wang S, Guo J, Yu H, Zhang H, Gong Y, Fei Z. Sum Rate Optimization for Multiple Access in Multi-FD-UAV-Assisted NOMA-Enabled Backscatter Communication Network. Electronics. 2023; 12(8):1873. https://doi.org/10.3390/electronics12081873
Chicago/Turabian StyleWang, Siqiang, Jing Guo, Hanxiao Yu, Han Zhang, Yuping Gong, and Zesong Fei. 2023. "Sum Rate Optimization for Multiple Access in Multi-FD-UAV-Assisted NOMA-Enabled Backscatter Communication Network" Electronics 12, no. 8: 1873. https://doi.org/10.3390/electronics12081873