

Passive IoT Optical Fiber Sensor Network for Water Level Monitoring with Signal Processing of Feature Extraction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Architecture of Passive IoT Optical Fiber Sensor Network for Water Level Monitoring
3. Water Level Measurement with Signal Processing Technique
3.1. Basic Measurement Principle
3.2. Multi-Channel Sensing with System Performance Indication (SPI) Parameter
3.3. Level Determination with Signal Processing Technique Based on Feature Extraction
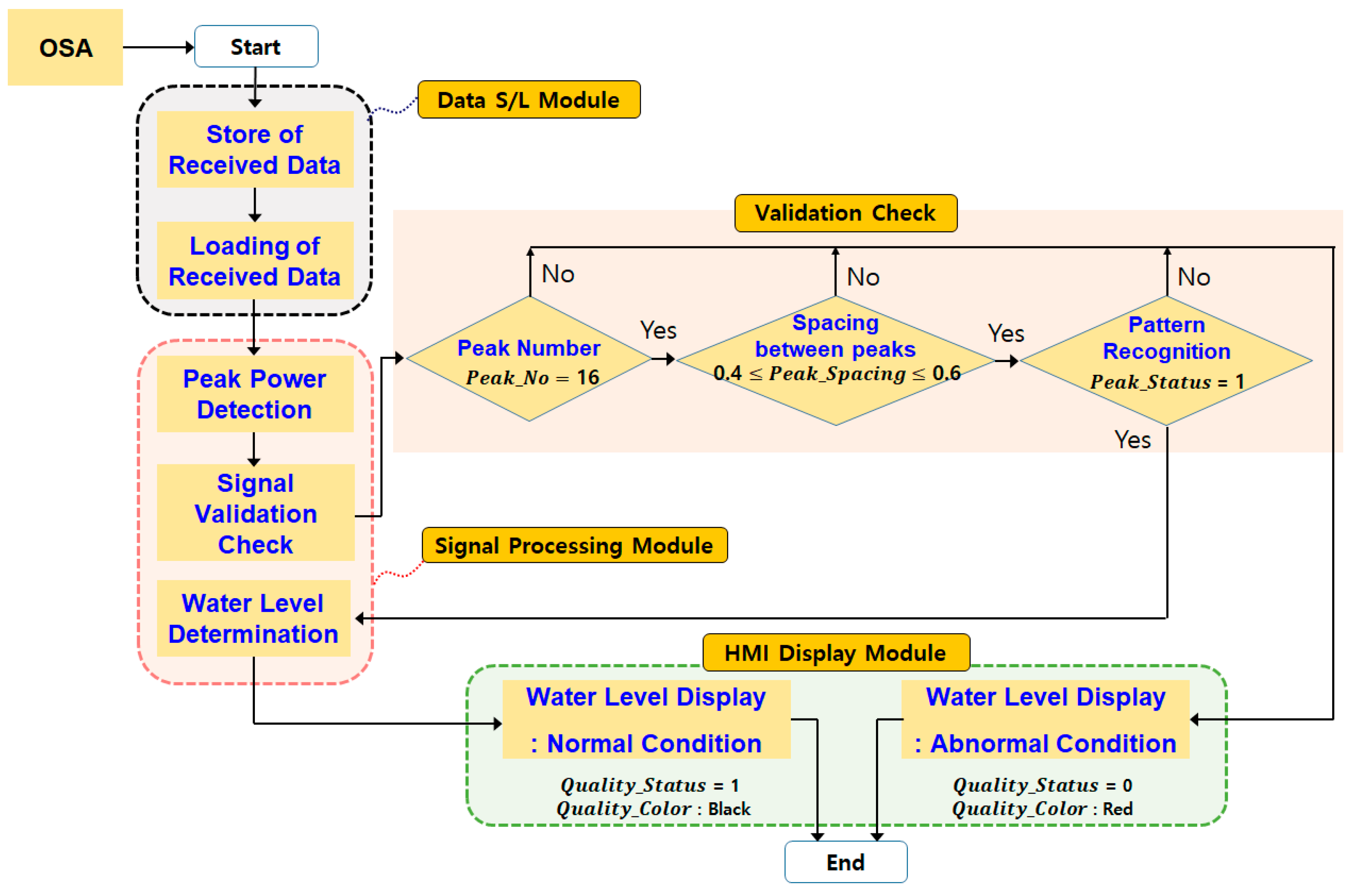
- Data Save/Load Module: This module brings the received raw data from OSA to the DB in the central server, where data are represented by [501 × 2] matrix for wavelength (the first column) and measured optical power (the second column). After converting the shape of the matrix from [501 × 2] to [2 × 501], the data is sent to the signal processing module to find out the peak power and its corresponding wavelength of each SU.
- Signal Processing Module: This module consists of three function blocks: (i) peak detection, (ii) signal validation check and (iii) water level determination. The first function block finds out the peak power and wavelength of each SU channel from the data matrix. Then, the quality of the signal (QoS) is evaluated by the signal validation block to check on the integrity of the received data. In particular, this validation process monitors several factors, such as the number of peak powers (), the wavelength spacing between neighboring peaks () and the pattern of detected peak power (). Based on these parameters, the quality status variable () is set to “1” (normal status) or “0” (abnormal status). In addition, the text color () for the status panel is also set to black in normal conditions or red in abnormal conditions. Finally, if the signal quality is turned out to be normal status, the actual water level is determined by the function block of water level determination. This determination process is proceeded by comparing the pre-set decision level (DL) with the detected channel peak powers (i.e., “1” when DL > channel peak power, and “0” when DL ≤ channel peak power). Then, using the signal pattern (e.g., “0000 0000 1111 1111” for a half-full water pool), the water level is determined and displayed.
- HMI Display Module: The signal processing results are delivered to the DB of the user application server for the display by the HMI display module. It shows diverse information such as the measured spectrum, the peak positions, the monitored water level, the pre-set decision level, the status panel to describe the signal quality condition, and so on. The details of the HMI display will be explained in Section 4.2.
4. Passive Remote-Sensing Capability with Signal Processing Technique
4.1. Back-Scattering Induced Degradation of Remote Sensing Capability
4.2. Full Demonstration of Remote Sensing with a Human–Machine Interface Display Module
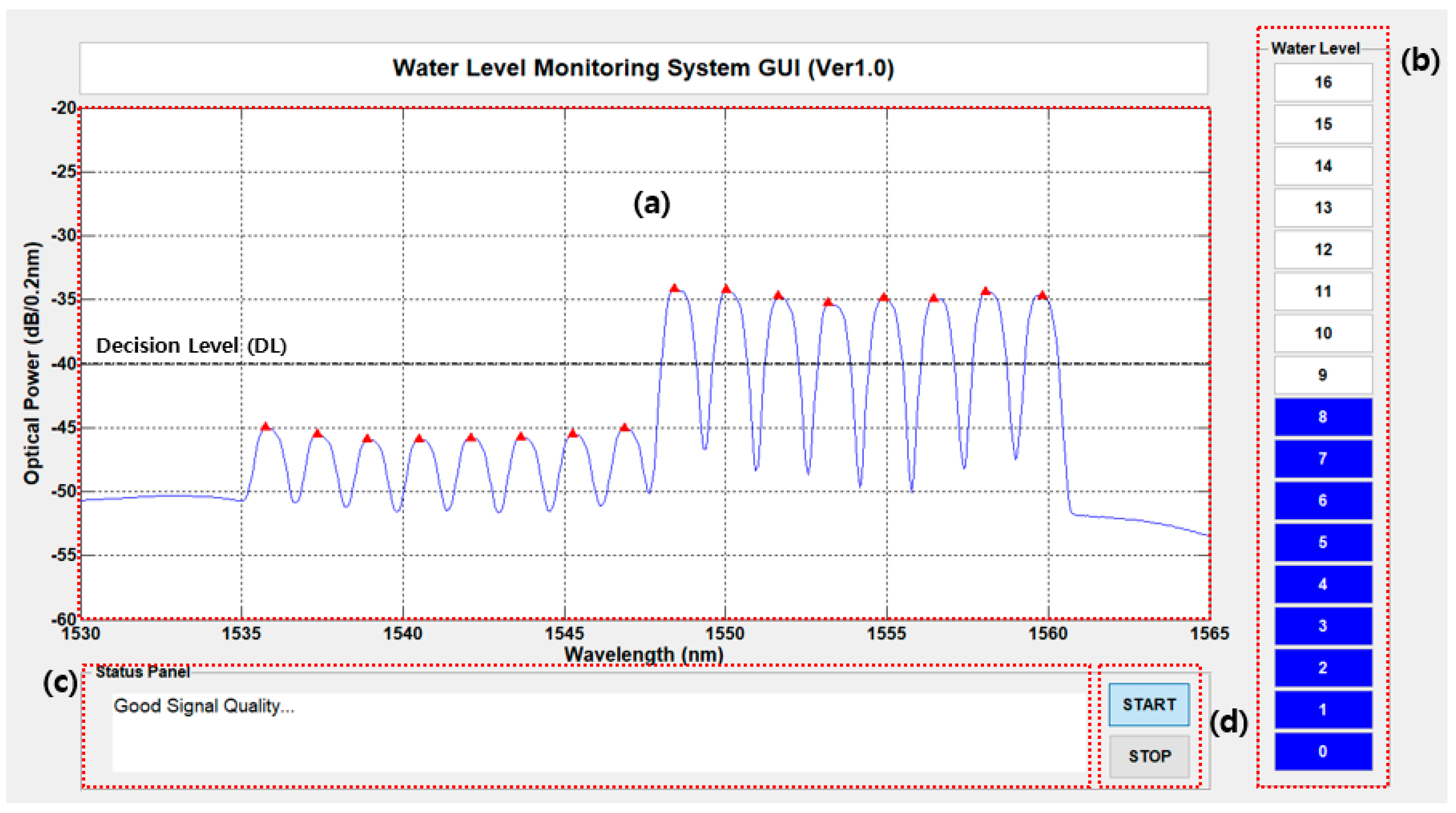
- Spectrum display window: This window shows the measured optical spectrum, which is saved in the DB of the central server. The result of the peak power detection is also displayed with red solid triangle marks on the displayed optical spectrum. Moreover, the decision level is represented with a black dashed line (---) for the determination of the water level. Below this level, the SUs are considered to be in the water, and vice versa.
- Water level indicating bar: This bar represents the actual water level measured, which is directly converted from the measured optical spectrum. A total of 17 steps of water levels can be represented according to the measurement of the water level (Step 0~16).
- Status panel: The signal validation results are shown on this panel. It contains information on signal conditions based on the measured optical spectrum using different text colors. If the measured optical signal is in good condition, the text is displayed in black; otherwise, the color of the text is changed to red.
- Start/Stop buttons: The real-time information shown on the monitor is updated every second after the start button is pushed. If the stop button is selected, the update is paused.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Allwood, G.; Wild, G.; Hinckley, S. Optical fiber sensors in physical intrusion detection systems: A review. IEEE Sens. J. 2016, 16, 5497–5509. [Google Scholar] [CrossRef] [Green Version]
- Wei, C.-L.; Lai, C.-C.; Liu, S.-Y.; Chung, W.H.; Ho, T.K.; Tam, H.-Y.; Ho, S.L.; McCusker, A.; Kam, J.; Lee, K.Y. A fiber bragg grating sensor system for train axle counting. IEEE Sens. J. 2010, 10, 1905–1912. [Google Scholar]
- Bado, M.; Casas, J. A review of recent distributed optical fiber sensors applications for civil engineering structural health monitoring. Sensors 2021, 21, 1818. [Google Scholar] [CrossRef]
- Chai, Q.; Luo, Y. Review on fiber-optic sensing in health monitoring of power grids. Opt. Eng. 2019, 58, 072007. [Google Scholar] [CrossRef] [Green Version]
- De Miguel-Soto, V.; López-Amo, M. Truly remote fiber optic sensor networks. J. Phys. Photonics 2019, 1, 042002. [Google Scholar] [CrossRef]
- Rizzolo, S.; Périsse, J.; Boukenter, A.; Ouerdane, Y.; Marin, E.; Macé, J.-R.; Cannas, M.; Girard, S. Real time monitoring of water level and temperature in storage fuel pools through optical fibre sensors. Sci. Rep. 2017, 7, 8766. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ferdinand, P.; Magne, S.; Laffont, G. Optical fiber sensors to improve the safety of nuclear power plants. In Proceedings of the Fourth Asia Pacific Optical Sensors Conference, Wuhan, China, 15 October 2013; Volume 8924, p. 89242G. [Google Scholar]
- Lee, H.-K.; Choo, J.; Kim, J. Multiplexed passive optical fiber sensor networks for water level monitoring: A review. Sensors 2020, 20, 6813. [Google Scholar] [CrossRef]
- Loizou, K.; Koutroulis, E.; Zalikas, D.; Liontas, G. A low-cost capacitive sensor for water level monitoring in large-scale storage tanks. In Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015. [Google Scholar]
- Jafer, E.; Ibala, C.S. Design and development of multi-node based wireless system for efficient measuring of resistive and capacitive sensors. Sens. Actuators A Phys. 2013, 189, 276–287. [Google Scholar] [CrossRef]
- Slavisa, A. A survey on optical technologies for IoT, smart industry, and smart infrastructures. J. Sens. Actuator Netw. 2019, 8, 47. [Google Scholar] [CrossRef] [Green Version]
- Gokhale, P.; Bhat, O.; Bhat, S. Introduction of IOT. Int. Adv. Res. J. Sci. Eng. Technol. 2018, 5, 41–44. [Google Scholar]
- Jaishetty, S.A.; Patil, R. IOT sensor network based approach for agricultural field monitoring and control. Int. J. Res. Eng. Technol. 2016, 5, 45–48. [Google Scholar]
- Silvia, L.U.; Sinha, G.R. Advances in Smart Environment Monitoring Systems Using IoT and Sensors. Sensors 2020, 20, 3113. [Google Scholar] [CrossRef]
- Callebaut, G.; Leenders, G.; Van Mulders, J.; Ottoy, G.; De Strycker, L.; Van der Perre, L. The Art of Designing Remote IoT Devices— Technologies and Strategies for a Long Battery Life. Sensors 2021, 21, 913. [Google Scholar] [CrossRef] [PubMed]
- Bagdadee, A.H.; Hoque, M.Z.; Zhang, L. IoT based wireless sensor network for power quality control in smart grid. Procedia Comput. Sci. 2020, 167, 1148–1160. [Google Scholar] [CrossRef]
- Fan, W.; Christoph, R.; Mehmet, R.Y. Real-time performance of a self-powered environmental IoT sensor network system. Sensors 2017, 17, 282. [Google Scholar] [CrossRef] [Green Version]
- Gulati, K.; Boddu, R.S.K.; Kapila, D.; Bangare, S.L.; Chandnani, N.; Saravanan, G. A review paper on wireless sensor network techniques in Internet of Things (IoT). Mater. Today Proc. 2021, 51, 161–165. [Google Scholar] [CrossRef]
- Zheng, Y.; Dhiman, G.; Sharma, A.; Sharma, A. An IoT-based water level detection system enabling fuzzy logic control and optical fiber sensor. Secur. Commun. Netw. 2021, 2021, 4229013. [Google Scholar] [CrossRef]
- Churcher, A.; Ullah, R.; Ahmad, J.; ur Rehman, S.; Masood, F.; Gogate, M.; Alqahtani, F.; Nour, B.; Buchanan, W.J. An Experimental analysis of attack classification using machine learning in IoT networks. Sensors 2021, 21, 446. [Google Scholar] [CrossRef] [PubMed]
- Bassan, F.R.; Rosolem, J.B.; Floridia, C.; Aires, B.N.; Peres, R.; Aprea, J.F.; Nascimento, C.A.M.; Fruett, F. Power-over-Fiber LPIT for voltage and current measurements in the medium voltage distribution networks. Sensors 2021, 21, 547. [Google Scholar] [CrossRef] [PubMed]
- López-Cardona, J.D.; Montero, D.S.; Vázquez, C. Smart remote nodes fed by power over fiber in internet of things applications. IEEE Sens. J. 2019, 19, 7328–7334. [Google Scholar] [CrossRef] [Green Version]
- Lee, H.J.; Ker, P.J.; Jamaludin, M.Z.; Isaac, S.; Halim, F. Power-Over-Fiber for internet of thing devices. J. Energy Environ. 2020, 12, 1–5. [Google Scholar]
- Leticia, C.S.; Egidio, R.N.; Eduardo, S.L.; Arismar, C.S. Optically-powered wireless sensor nodes towards industrial internet of things. Sensors 2022, 22, 57. [Google Scholar] [CrossRef]
- DeLoach, B.; Miller, R.; Kaufman, S. Sound alerter powered over an optical fiber. Bell Syst. Tech. J. 1978, 57, 3309–3316. [Google Scholar] [CrossRef]
- de Nazare, F.V.B.; Werneck, M.M. Hybrid optoelectronic sensor for current and temperature monitoring in overhead transmission lines. IEEE Sens. J. 2012, 12, 1193–1194. [Google Scholar] [CrossRef]
- Matsuura, M.; Minamoto, Y. Optically powered and controlled beam steering system for radio-over-fiber networks. J. Lightw. Technol. 2017, 35, 979–988. [Google Scholar] [CrossRef]
- López-Cardona, J.D.; Peroglio, G.M.; Vázquez, C. Optical power delivery for feeding remote sensors in health and safety applications. In Proceedings of the 26th International Conference Optical Fiber Sensors, Lausanne, Switzerland, 24–28 September 2018. paper ThE42. [Google Scholar]
- Lee, H.-K.; Choo, J.; Shin, G. A Simple all-optical water level monitoring system based on wavelength division multiplexing with an arrayed waveguide grating. Sensors 2019, 19, 3095. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lee, H.-K.; Choo, J.; Kim, J. 16 Ch × 200 GHz DWDM-Passive Optical Fiber Sensor Network Based on a Power Measurement Method for Water-Level Monitoring of the Spent Fuel Pool in a Nuclear Power Plant. Sensors 2021, 21, 4055. [Google Scholar] [CrossRef]
- Yüksel, K. Optical fiber sensor for remote and multi-point refractive index measurement. Sens. Actuators A Phys. 2016, 250, 29–34. [Google Scholar] [CrossRef] [Green Version]
- Yoo, W.J.; Sim, H.I.; Shin, S.H.; Jang, K.W.; Cho, S.; Moon, J.H.; Lee, B. A Fiber-Optic Sensor Using an Aqueous Solution of Sodium Chloride to Measure Temperature and Water Level Simultaneously. Sensors 2014, 14, 18823–18836. [Google Scholar] [CrossRef] [Green Version]
- Kim, Y.H.; Park, S.J.; Jeon, S.-W.; Ju, S.; Park, C.-S.; Han, W.-T.; Lee, B.H. Thermo-optic coefficient measurement of liquids based on simultaneous temperature and refractive index sensing capability of a two-mode fiber interferometric probe. Opt. Express 2012, 20, 23744–23754. [Google Scholar] [CrossRef]
- Lee, H.-K.; Lee, H.-J.; Lee, C.-H. A simple and color-free WDM-passive optical network using spectrum-sliced Fabry-Perot laser diodes. IEEE Photonics Technol. Lett. 2008, 20, 220–222. [Google Scholar] [CrossRef]
- Kim, J.; Moon, S.-R.; Yoo, S.-H.; Lee, C.-H. 800 Gb/s (80 × 10 Gb/s) capacity WDM-PON based on ASE injection seeding. Opt. Express 2014, 22, 10359–10365. [Google Scholar] [CrossRef] [PubMed] [Green Version]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, H.-K.; Kim, Y.; Park, S.; Kim, J. Passive IoT Optical Fiber Sensor Network for Water Level Monitoring with Signal Processing of Feature Extraction. Electronics 2023, 12, 1823. https://doi.org/10.3390/electronics12081823
Lee H-K, Kim Y, Park S, Kim J. Passive IoT Optical Fiber Sensor Network for Water Level Monitoring with Signal Processing of Feature Extraction. Electronics. 2023; 12(8):1823. https://doi.org/10.3390/electronics12081823
Chicago/Turabian StyleLee, Hoon-Keun, Youngmi Kim, Sungbaek Park, and Joonyoung Kim. 2023. "Passive IoT Optical Fiber Sensor Network for Water Level Monitoring with Signal Processing of Feature Extraction" Electronics 12, no. 8: 1823. https://doi.org/10.3390/electronics12081823