
Communication, Computing, and Caching Trade-Off in VR Networks
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Related Works
1.2. Contributions and Outcomes
2. System Model
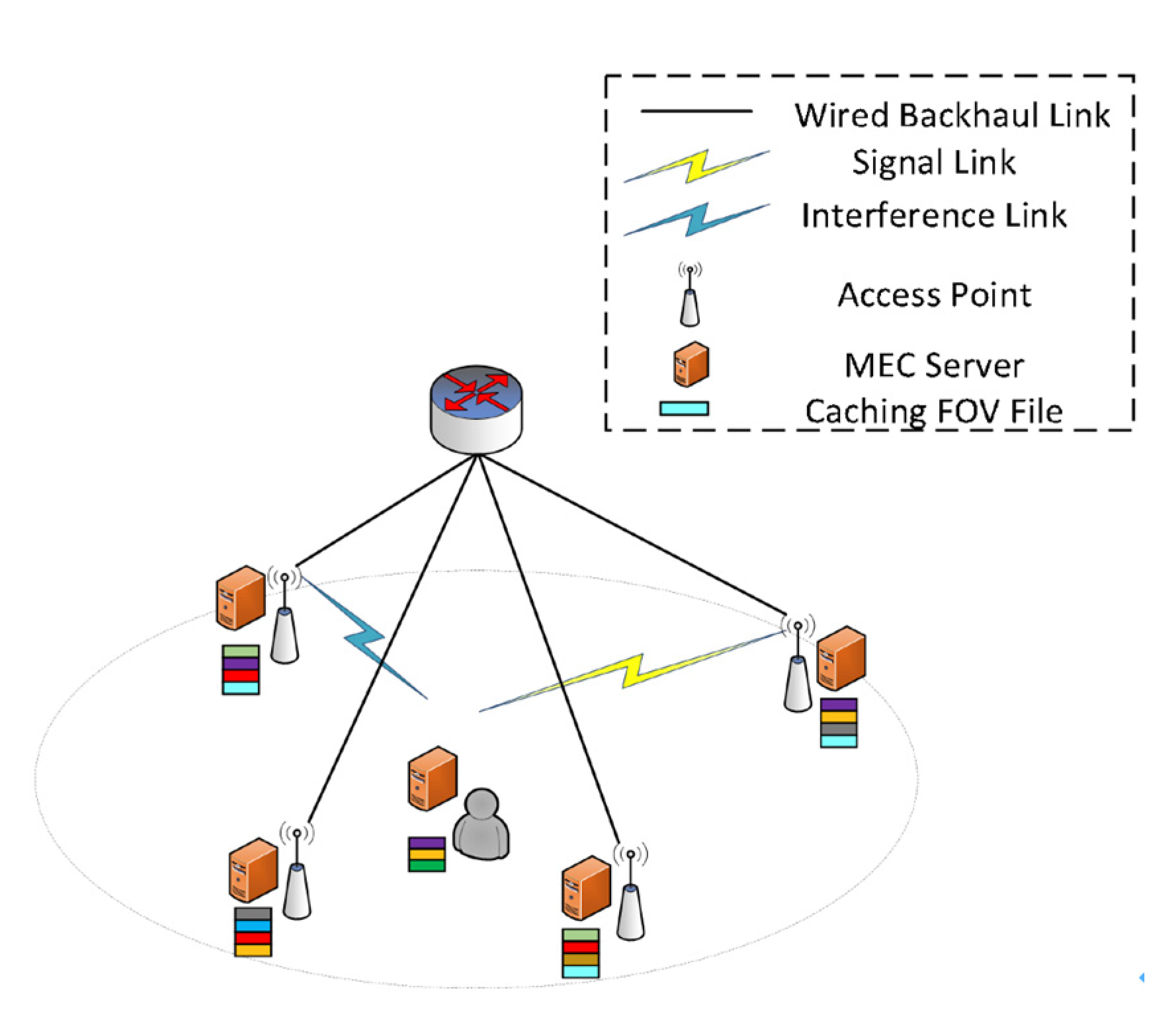
2.1. Network Framework
2.2. Computing–Offloading and Cooperative Caching Strategy
2.3. Service Mechanism
- (1)
- 3D Caching Locally (3CL)
- (2)
- 2D Caching—Computing Locally (2CCL)
- (3)
- 2D Computing Locally (2CL)
- (4)
- 3D Caching MEC (3CM)
- (5)
- 2D Caching-Computing MEC (2CCM)
- (6)
- 2D Computing MEC (2CM)
- (7)
- CS Downloading (CD)
3. Problem Construction and Solution
3.1. Problem Definition
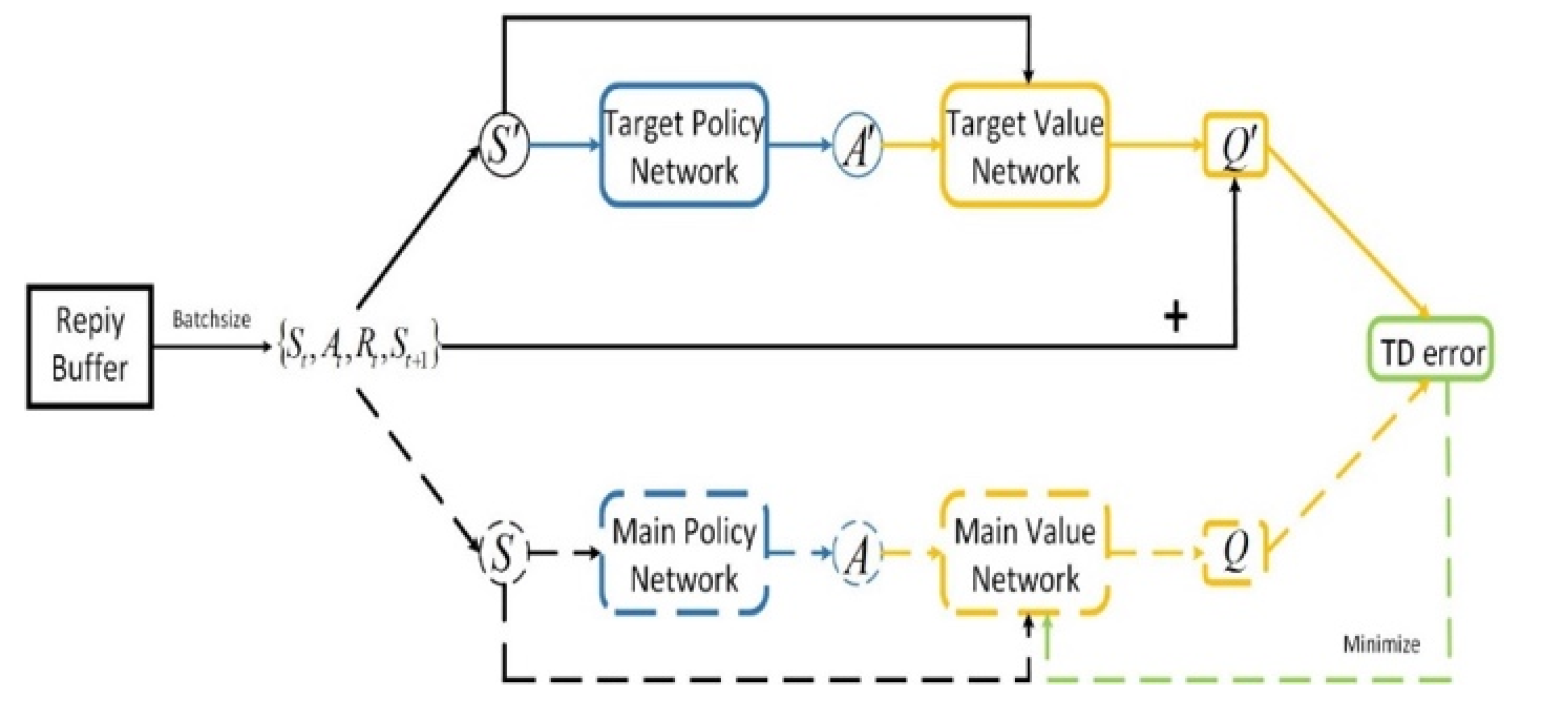
3.2. DDPG-Based Optimization Method
- State: denotes the state () at time , which is the value of the decision matrix set;
- Action: We define , where ;
- State transition probability: denotes the likelihood that the current state and its behavior will continue in the future;
- Reward: The agent receives an immediate reward at the end moment of each ;
- Discount factor: We define as the discount factor. Therefore, the long-term reward of the system can be expressed as .
4. Performance Evaluation
4.1. Simulation Setup
- (1)
- CS downloading scheme: After the 3D FOV file is obtained, there are ;
- (2)
- Only caching scheme: The VR device and APs cache the 3D FOV files of all videos based on the ‘most popular content (MPC)’ rule. VR device and AP denote the numbers of 3D FOV files stored in VR devices and MEC servers: and . The corresponding numbers of full VR videos stored in the VR devices and MEC servers are denoted as and , respectively;
- (3)
- Independent caching and computing scheme: After the 3D FOV file is stored, the video file needs to satisfy the ‘MPC’ rule. When the device obtains the FOV file from the server, the storage and projection of the 2D FOV file depend on the performance of the MEC server. The number of 2D FOV files is expressed as , and the corresponding number of full VR videos stored on MEC servers is denoted as .
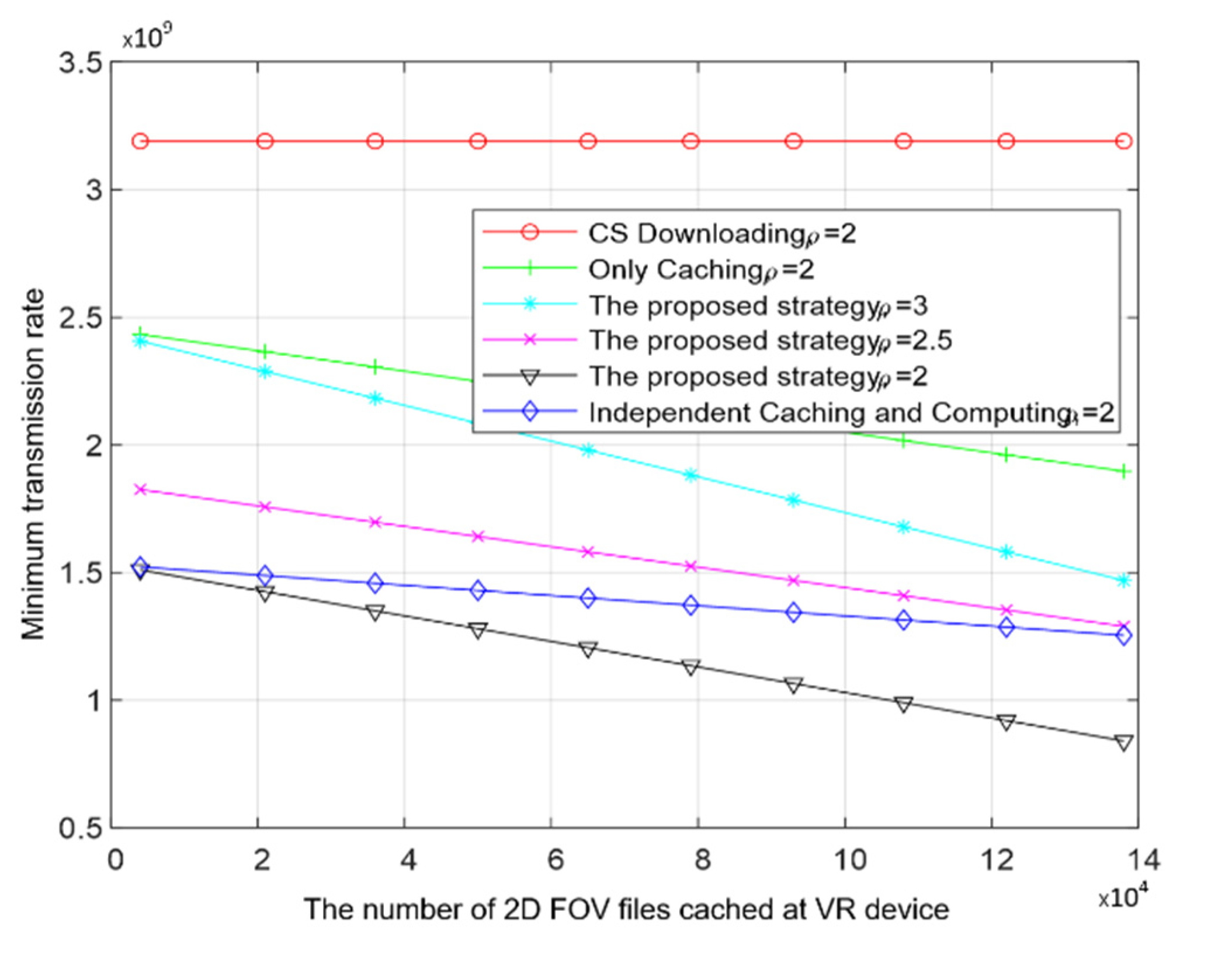
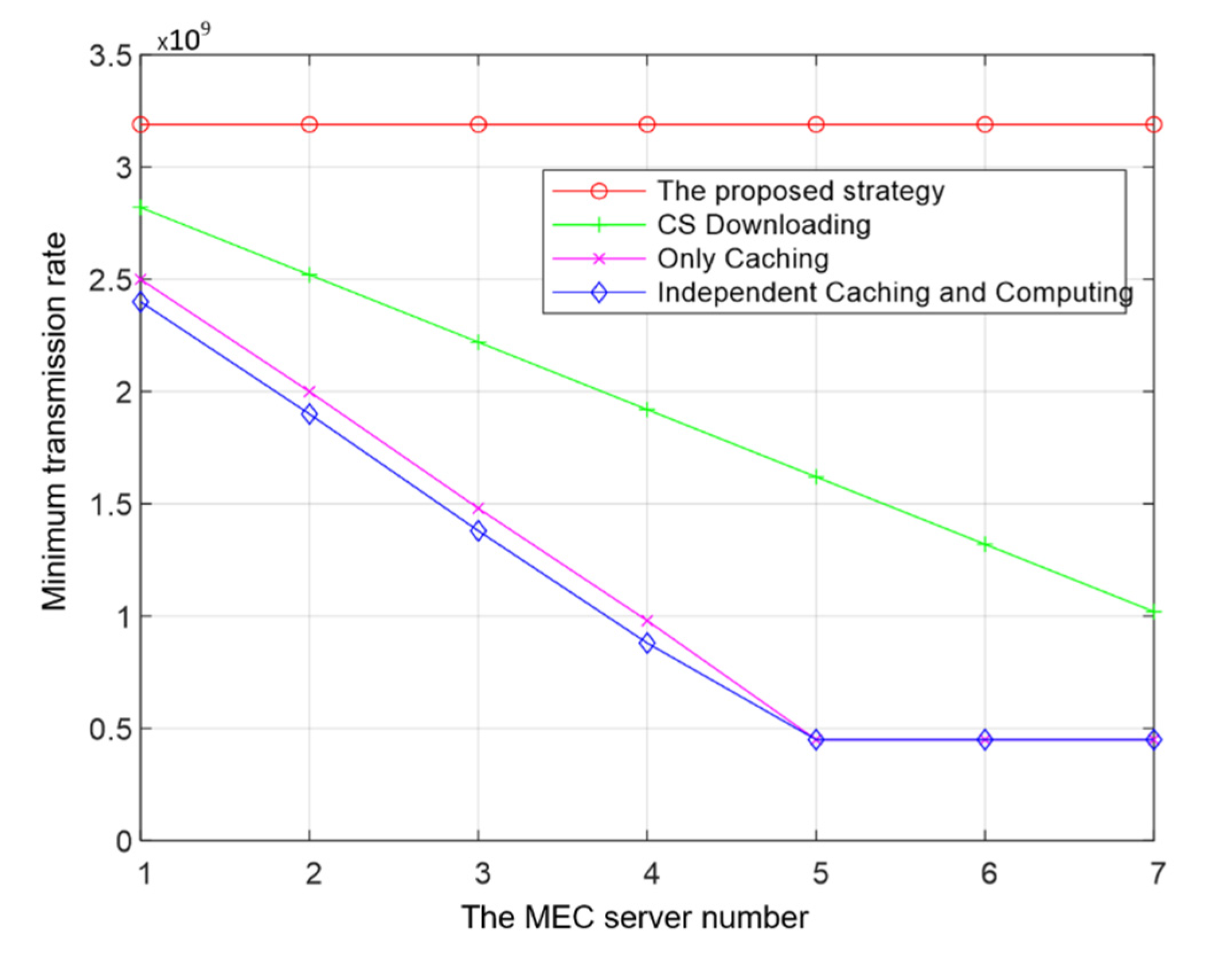
4.2. Simulation Results and Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Danyluk, K.; Ulusoy, T.; Wei, W.; Willett, W. Touch and Beyond: Comparing Physical and Virtual Reality Visualizations. In IEEE Transactions on Visualization and Computer Graphics; IEEE: Piscataway, NJ, USA, 2022; Volume 28, pp. 1930–1940. [Google Scholar]
- Fennedy, K.; Hartmann, J.; Roy, Q.; Perrault, S.T.; Vogel, D. OctoPocus in VR: Using a Dynamic Guide for 3D Mid-Air Gestures in Virtual Reality. IEEE Trans. Vis. Comput. Graph. 2021, 27, 4425–4438. [Google Scholar] [CrossRef] [PubMed]
- Elbamby, M.S.; Perfecto, C.; Bennis, M.; Doppler, K. Toward Low-Latency and Ultra-Reliable Virtual Reality. IEEE Netw. 2018, 32, 78–84. [Google Scholar] [CrossRef] [Green Version]
- Peck, T.C.; Sockol, L.E.; Hancock, S.M. Mind the Gap: The Underrepresentation of Female Participants and Authors in Virtual Reality Research. IEEE Trans. Vis. Comput. Graph. 2020, 26, 1945–1954. [Google Scholar] [CrossRef] [PubMed]
- Liang, H.W.; Chi, S.Y.; Chen, B.Y.; Hwang, Y.H. Reliability and Validity of a Virtual Reality-Based System for Evaluating Postural Stability. IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 85–91. [Google Scholar] [CrossRef] [PubMed]
- Sun, Y.; Chen, Z.; Tao, M.; Liu, H. Communications, Caching, and Computing for Mobile Virtual Reality: Modeling and Tradeoff. IEEE Trans. Commun. 2019, 67, 7573–7586. [Google Scholar] [CrossRef] [Green Version]
- Bastug, E.; Bennis, M.; Médard, M.; Debbah, M. Toward Interconnected Virtual Reality: Opportunities, Challenges, and Enablers. IEEE Commun. Mag. 2017, 55, 110–117. [Google Scholar] [CrossRef]
- Li, Q.; Wang, X.; Wang, D. Optimal D2D Cooperative Caching System in SDN Based Wireless Network. In Proceedings of the 2019 IEEE 30th Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Istanbul, Turkey, 9–11 September 2019; pp. 1–7. [Google Scholar]
- Cui, Y.; He, W.; Ni, C.; Guo, C.; Liu, Z. Energy-efficient resource allocation for cacheassisted mobile edge computing. In Proceedings of the 2017 IEEE 42nd Conference on Local Computer Networks, Singapore, 9 October 2017; pp. 640–664. [Google Scholar]
- Fei, Z.; Wang, F.; Wang, J.; Xie, X. QoE Evaluation Methods for 360-Degree VR Video Transmission. IEEE J. Sel. Top. Signal Process. 2020, 14, 78–88. [Google Scholar] [CrossRef]
- Huang, H.; Liu, B.; Chen, L.; Xiang, W.; Hu, M.; Tao, Y. D2D-Assisted VR Video Pre-Caching Strategy. IEEE Access 2018, 6, 61886–61895. [Google Scholar] [CrossRef]
- Dai, J.; Zhang, Z.; Mao, S.; Liu, D. A View Synthesis-Based 360° VR Caching System Over MEC-Enabled C-RAN. IEEE Trans. Circuits Syst. Video Technol. 2020, 30, 3843–3855. [Google Scholar] [CrossRef]
- Ndikumana, A.; Ullah, S.; LeAnh, T.; Tran, N.H.; Hong, C.S. Collaborative Cache Allocation and Computation Offloading in Mobile Edge Computing. In Proceedings of the 2017 19th Asia-Pacific Network Operations and Management Symposium (APNOMS), Seoul, Republic of Korea, 27–29 September 2017; pp. 366–369. [Google Scholar]
- Chakareski, J. VR/AR Immersive Communication: Caching, Edge Computing, and Transmission Trade-Offs. In Workshop on Virtual Reality and Augmented Reality Network; ACM Digital Library: New York, NY, USA, 2017; pp. 36–41. [Google Scholar]
- Dang, T.; Peng, M. Joint Radio Communication, Caching, and Computing Design for Mobile Virtual Reality Delivery in Fog Radio Access Networks. IEEE J. Sel. Areas Commun. 2019, 37, 1594–1607. [Google Scholar] [CrossRef]
- Du, J.; Yu, F.R.; Lu, G.; Wang, J.; Jiang, J.; Chu, X. MEC-Assisted Immersive VR Video Streaming Over Terahertz Wireless Networks: A Deep Reinforcement Learning Approach. IEEE Internet Things J. 2020, 7, 9517–9529. [Google Scholar] [CrossRef]
- Spinelli, F.; Mancuso, V. Toward Enabled Industrial Verticals in 5G: A Survey on MEC-Based Approaches to Provisioning and Flexibility. IEEE Commun. Surv. Tutor. 2021, 23, 596–630. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, J.; Argyriou, A.; Ci, S. MEC-Assisted Panoramic VR Video Streaming Over Millimeter Wave Mobile Networks. IEEE Trans. Multimed. 2019, 21, 1302–1316. [Google Scholar] [CrossRef]
- Medeiros, D.; Ribeiro, E.; Dam, P.; Pinheiro, R.; Motta, T.; Loaiza, M.; Raposo, A.B. A Case Study on the Implementation of the 3C Collaboration Model in Virtual Environments. In Proceedings of the 2012 14th Symposium on Virtual and Augmented Reality, Rio de Janeiro, Brazil, 28–31 May 2012; pp. 147–154. [Google Scholar]
- Chen, W.; Song, Q.; Lin, P.; Guo, L.; Jamalipour, A. Proactive 3C Resource Allocation for Wireless Virtual Reality Using Deep Reinforcement Learning. In Proceedings of the 2021 IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 7–11 December 2021; pp. 1–6. [Google Scholar]
- Li, Q.; Wang, D.; Lu, H. A Cooperative Caching and Computing-Offloading Method for 3C Trade-Off in VR Video Services. IEEE Access 2021, 9, 124010–124022. [Google Scholar] [CrossRef]
- Silver, D.; Lever, G.; Heess, N.; Degris, T.; Wierstra, D.; Riedmiller, M. Deterministic policy gradient algorithms. In Proceedings of the 31st International Conference on Machine Learning, Beijing, China, 21–June 2014; Volume 32, pp. I-387–I-395. [Google Scholar]
- Murthy, A.V.; Karam, L.J. A MATLAB-based framework for image and video quality evaluation. In Proceedings of the 2010 Second International Workshop on Quality of Multimedia Experience (QoMEX), Trondheim, Norway, 21–23 June 2010; pp. 242–247. [Google Scholar]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, Y.; Wang, D.; Hou, Y. Communication, Computing, and Caching Trade-Off in VR Networks. Electronics 2023, 12, 1577. https://doi.org/10.3390/electronics12071577
Feng Y, Wang D, Hou Y. Communication, Computing, and Caching Trade-Off in VR Networks. Electronics. 2023; 12(7):1577. https://doi.org/10.3390/electronics12071577
Chicago/Turabian StyleFeng, Yuqing, Dongyu Wang, and Yanzhao Hou. 2023. "Communication, Computing, and Caching Trade-Off in VR Networks" Electronics 12, no. 7: 1577. https://doi.org/10.3390/electronics12071577