
System-Level Consideration and Multiphysics Design of Propulsion Motor for Fully Electrified Battery Powered Car Ferry Propulsion System
 ,
,  , ,
, ,
Abstract
:1. Introduction
1.1. Background
1.2. Bibliography Review
1.3. Contribution
- (i)
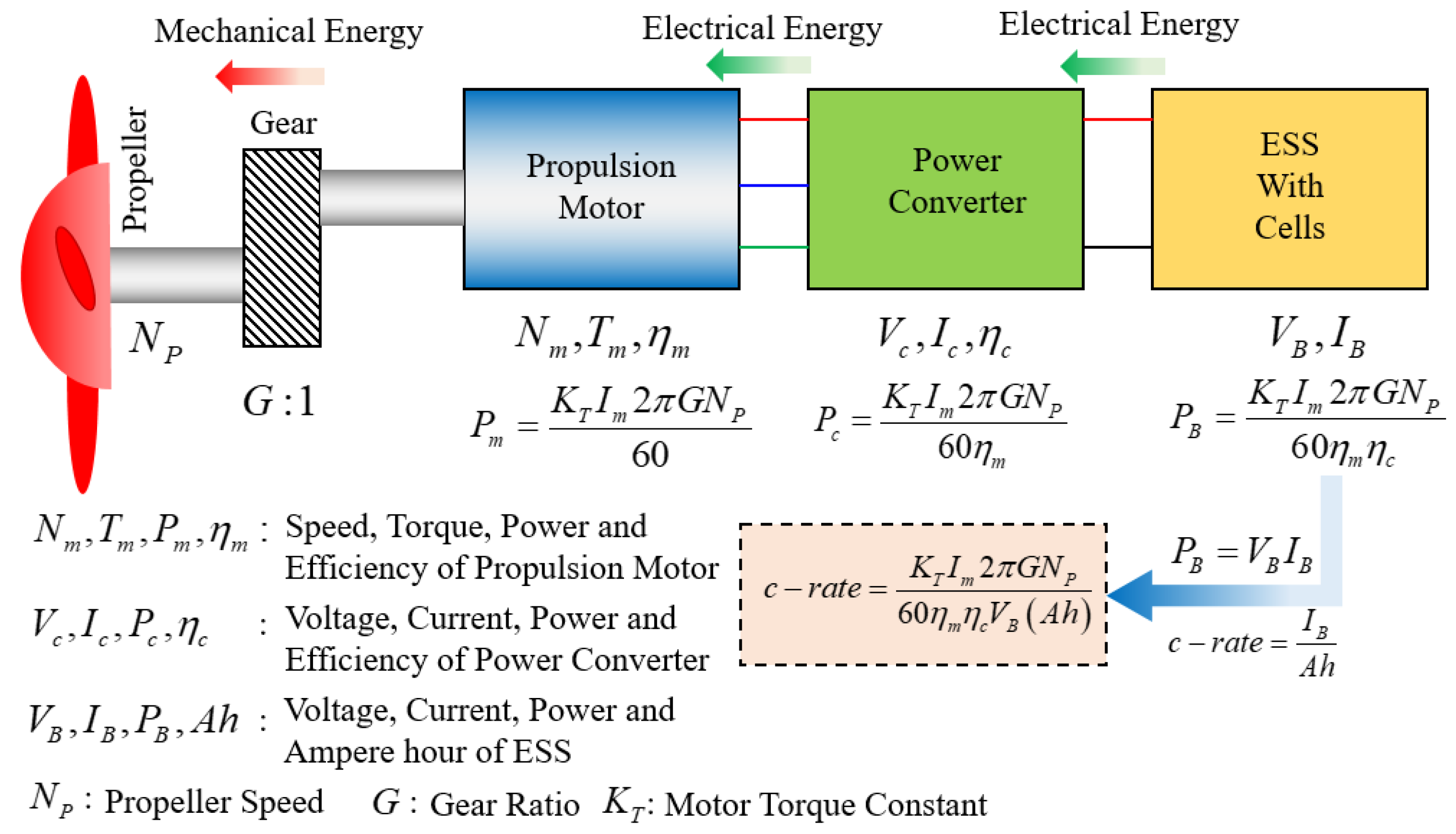
- A detailed system level energy flow infrastructure for an F-EBP car ferry using an RBSS is proposed showing how DC grid electric energy is transmitted to the propulsion motor to change to the mechanical energy of the propellers.
- (ii)
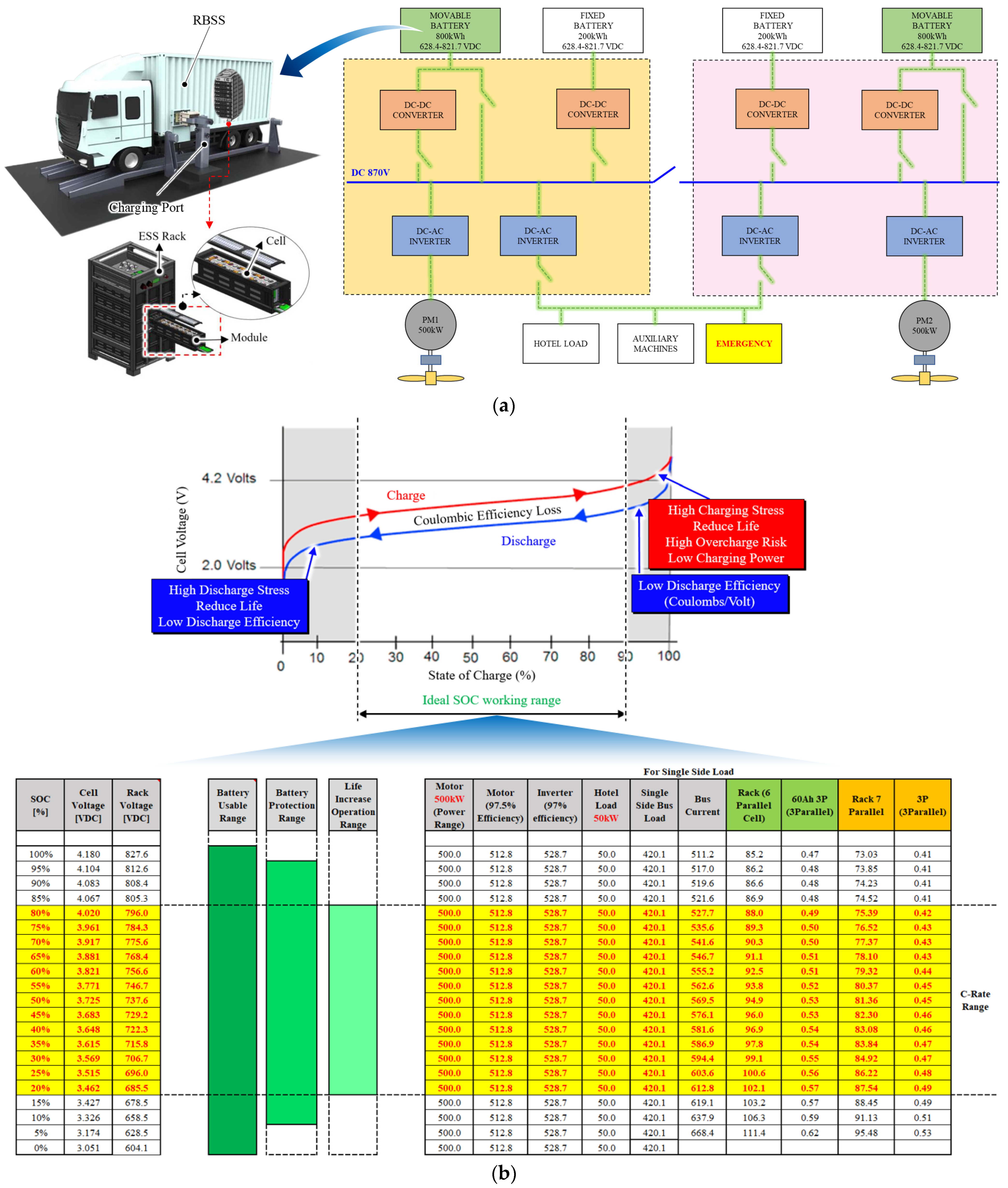
- An overview is provided on the operating range of the voltage level for the DC grid and its selection method for the propulsion system design.
- (iii)
- An in-depth topology and the initial design parameter section for the electromagnetic and thermal design of the propulsion motor for the F-EBP car ferry using an RBSS are proposed.
- (iv)
- A combined multiphysics design of the propulsion motor for the F-EBP car ferry using an RBSS is proposed considering electromagnetic and thermal performances. Through electromagnetic design, possible heat sources are identified, and thermal behavior under steady state (hot spot points) operation is confirmed.
- (v)
- Insights on slot insulator selection and the ways to water-seal the propulsion motor are presented.
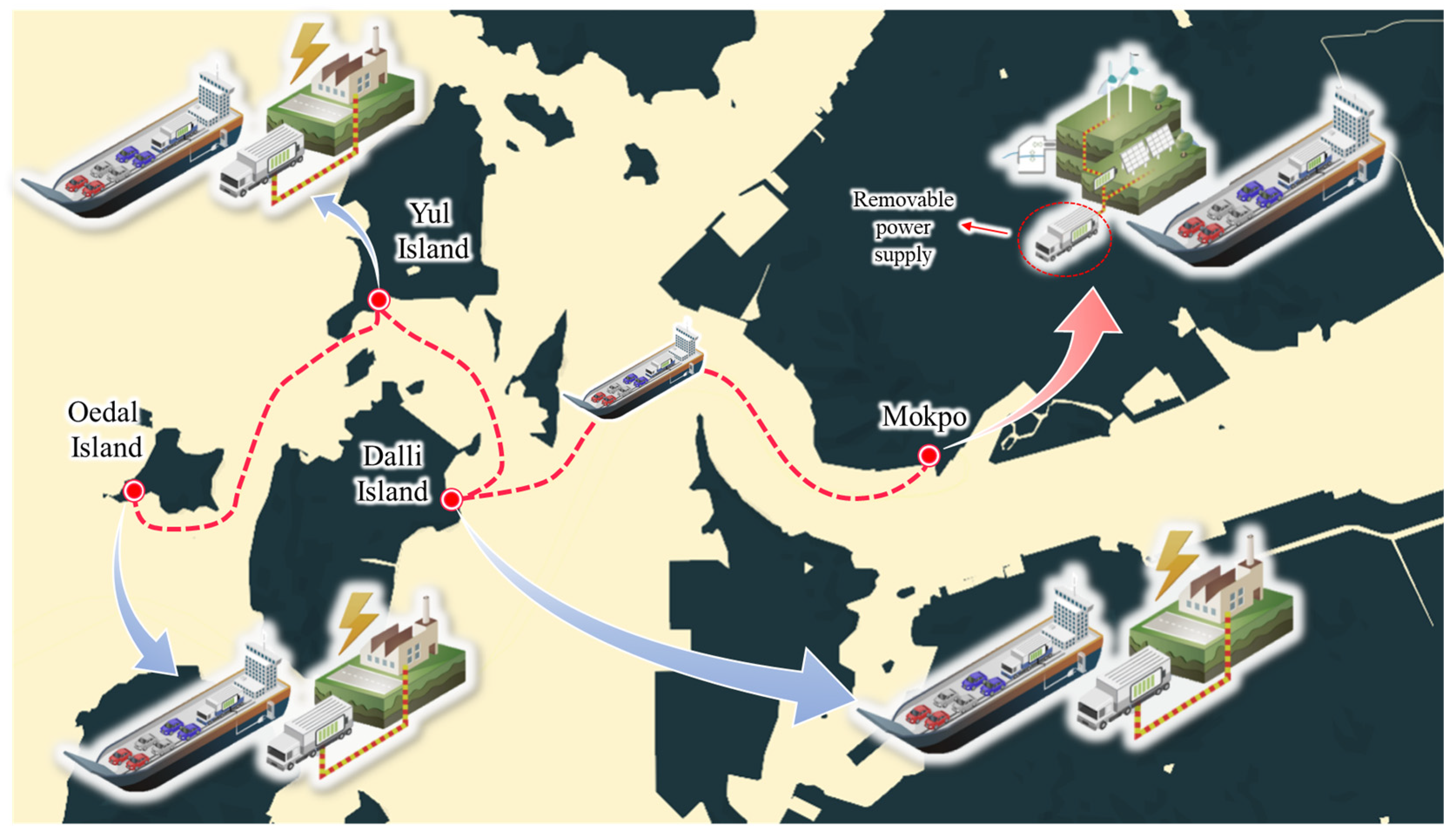
2. Fully Electrified Battery Powered (F-EBP) Car Ferry with Removable Battery Supply Systems (RBSSs)
2.1. F-EBP Car Ferry System Overview
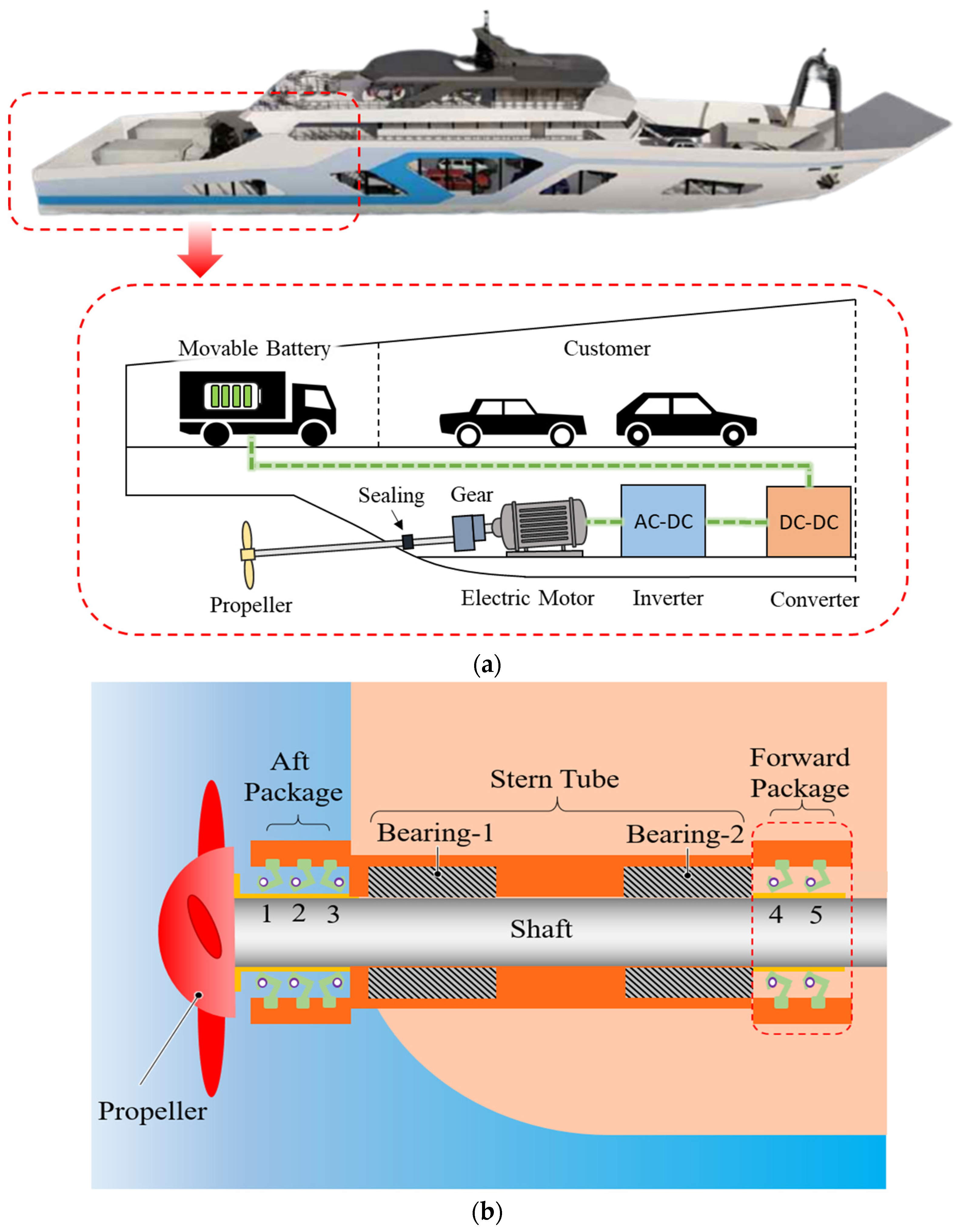
2.2. Sealing Method of Inboard Electric Drives
2.3. Energy Flow Diagram of F-EBP Car Ferry Propulsion System
3. Electromagnetic Design and Analysis of Propulsion Motor for F-EBP Car Ferry Propulsion System
3.1. Motor Topology Selection
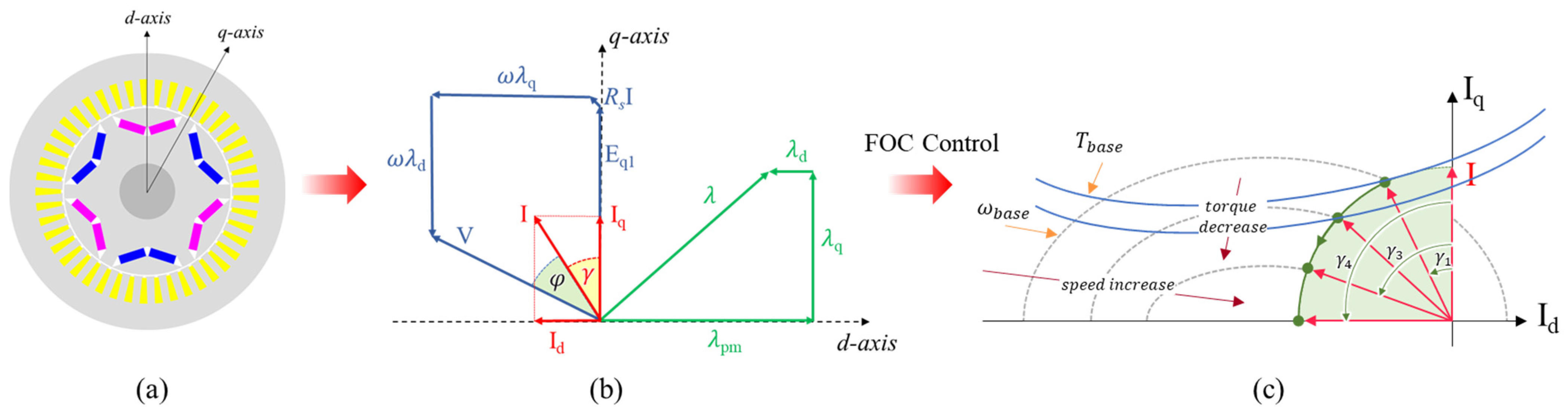
3.2. Electromagnetic Modeling of IPMSM for F-EBP Car Ferry Propulsion
3.3. Loss Models of IPMSM Considering Electromagnetic and Mechanical Losses
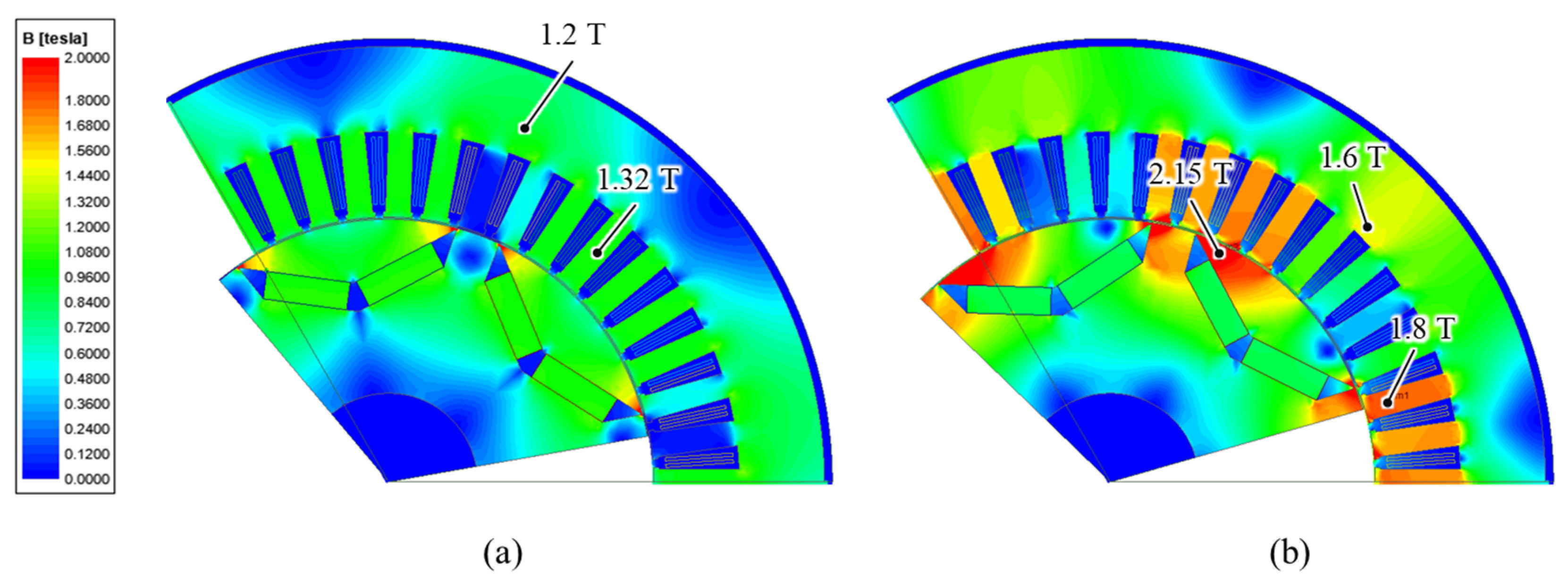
3.4. Electromagnetic Design Results
4. Thermal Design and Analysis Results of Propulsion Motor for F-EBP Car Ferry Propulsion System
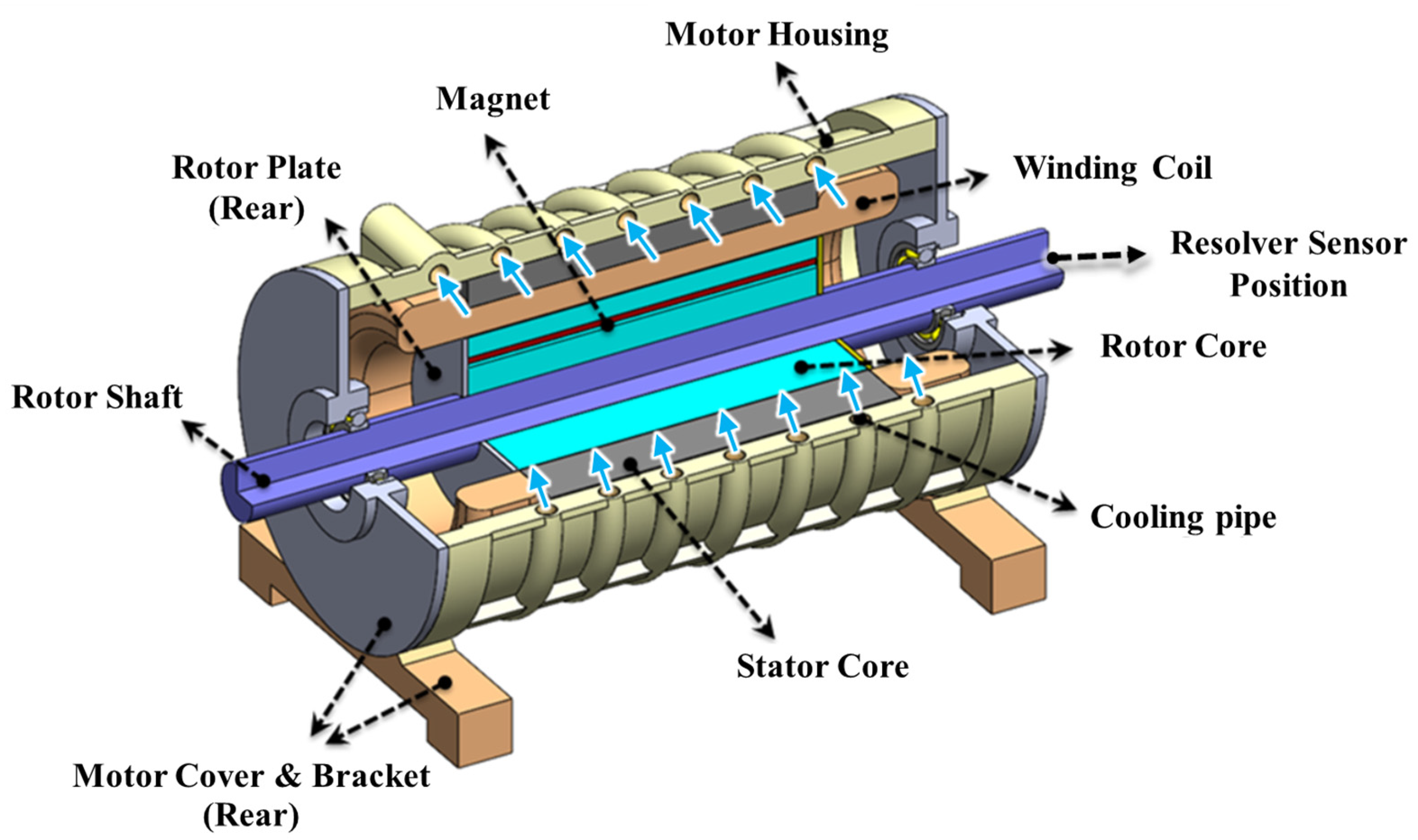
4.1. Overview of Cooling System of Propulsion Motor for F-EBP Car Ferry Propulsion System
4.2. Lumped-Parameter Thermal Network (LPTN) Model of Proposed IPMSM
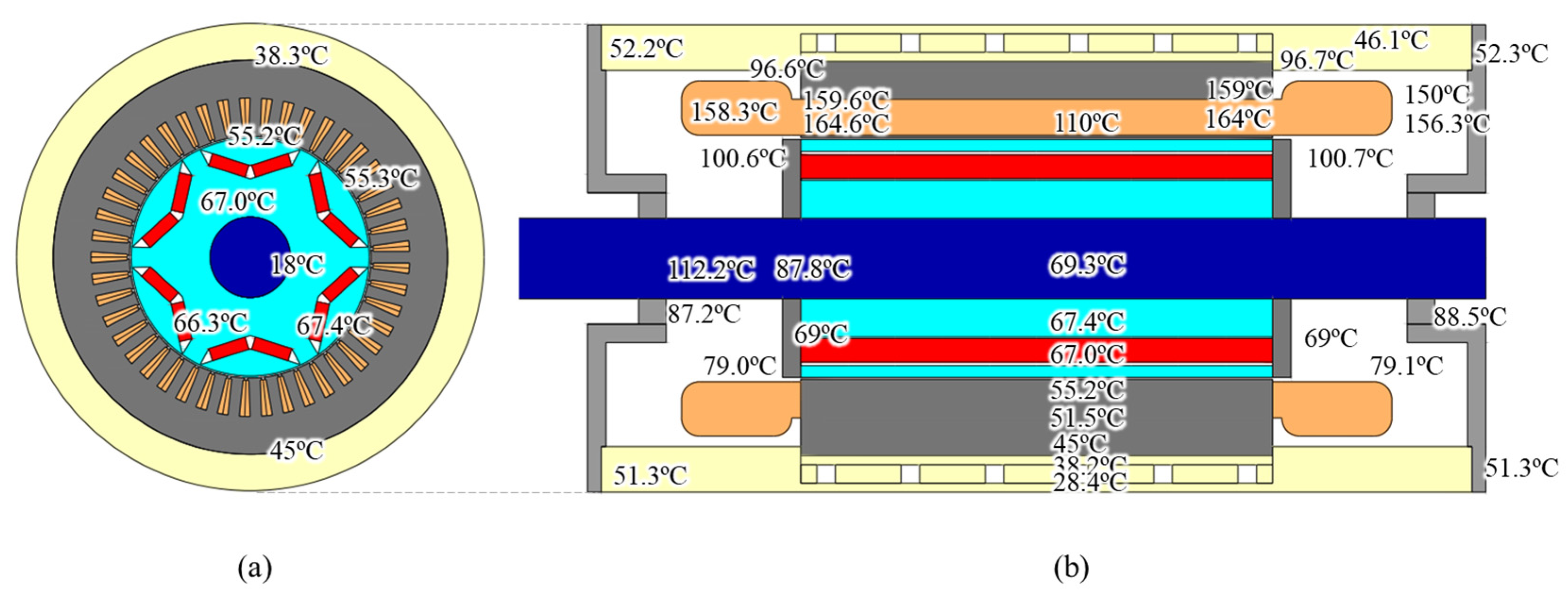
4.3. Steady-State Thermal Analysis
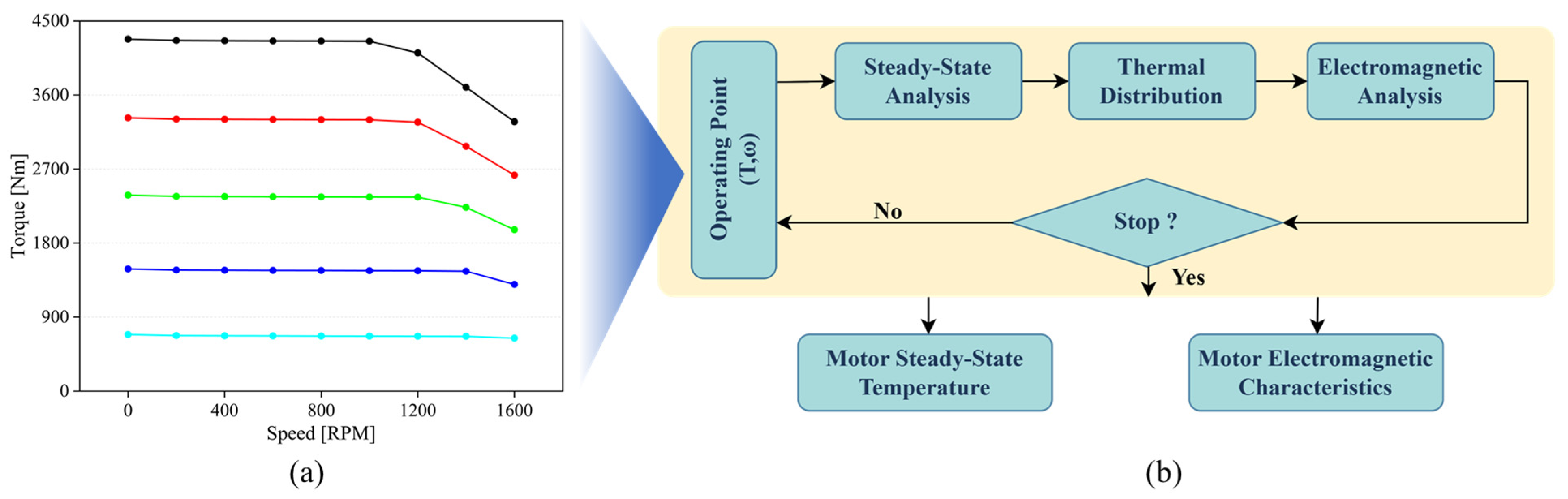
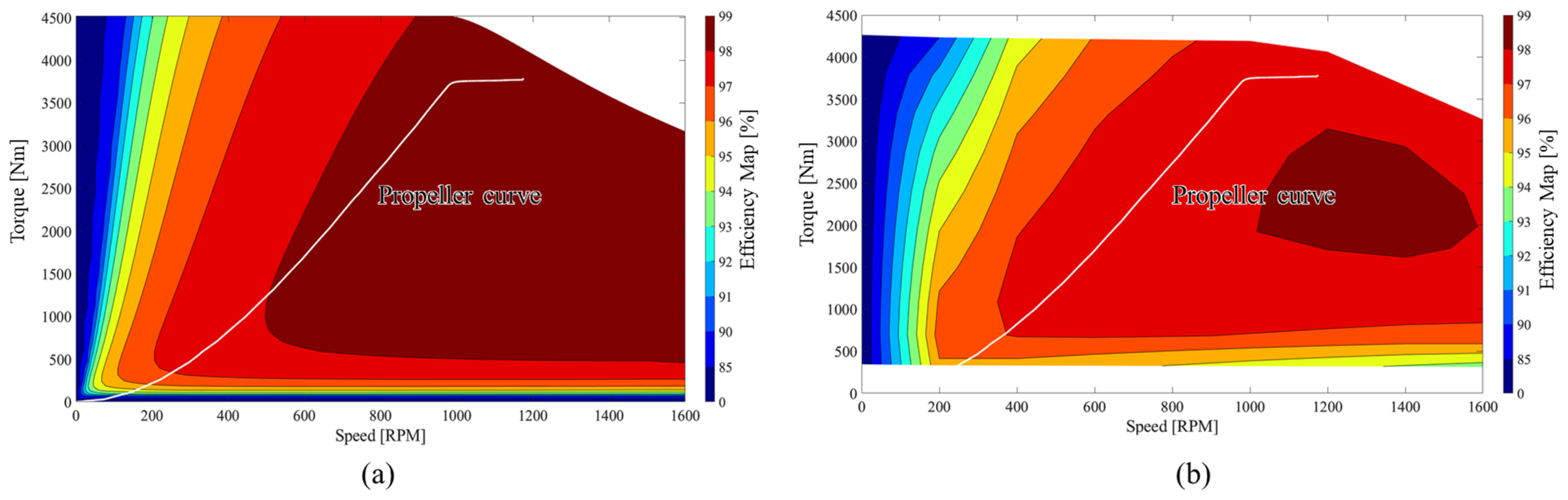
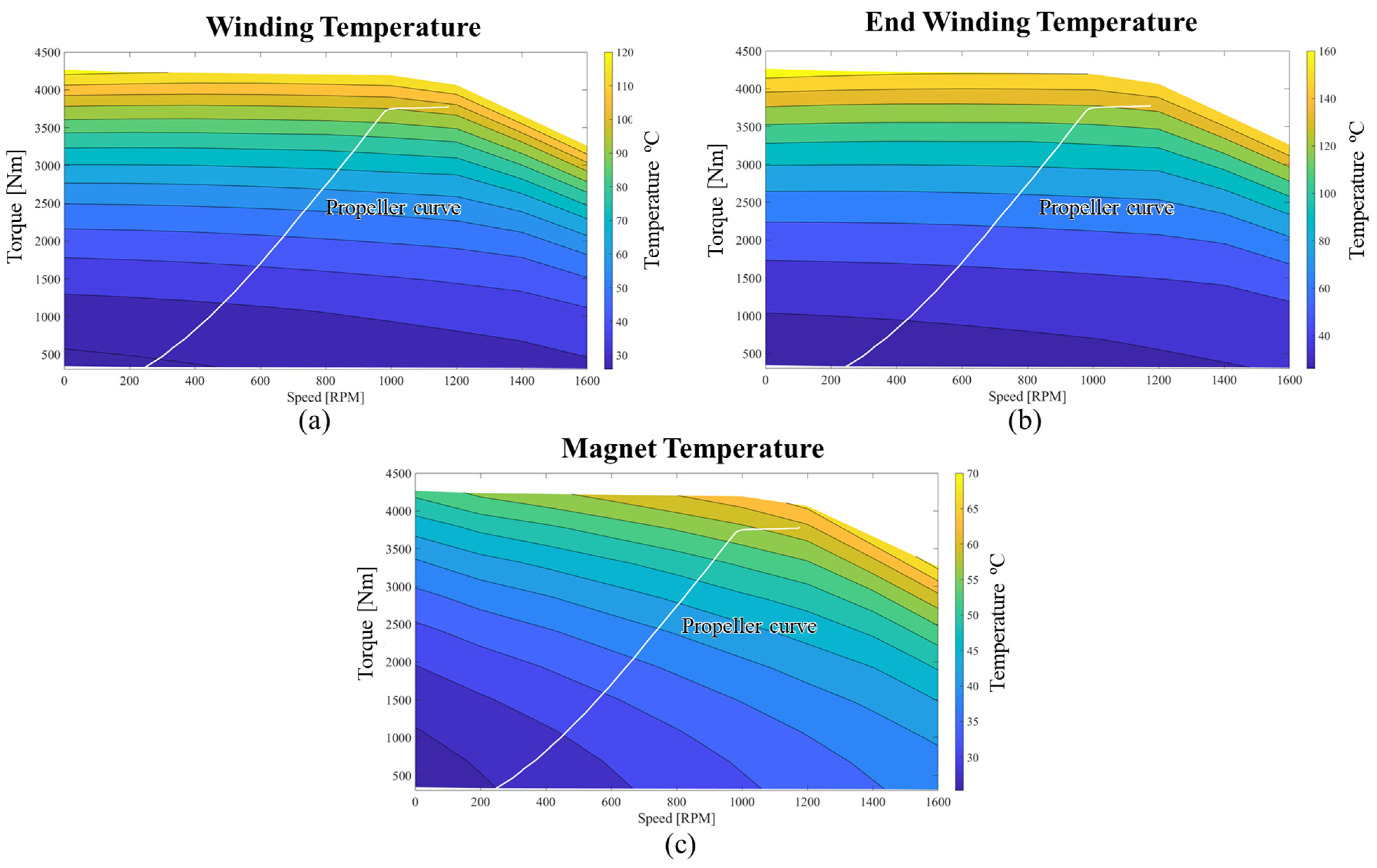
4.4. Coupled Electromagnetic-Thermal Analysis
5. Comparison with Available Technologies and Discussion on Future Challenges and Room for Improvement
- (i)
- There is a requirement for specialized grid stations on the coast to have strong enough charging for ships operating with various kilowatt-hour power depending upon weather conditions.
- (ii)
- A typical grid station may cost millions of dollars, and hence the economic problem should be considered when building it.
- (iii)
- Safety is a critical issue due to the high power of the battery/charging system.
- (iv)
- The capacity of the ship is limited because of the limit on the energy density of the battery, while increasing the number of batteries in a ship is not a practical solution due to size and weight limitations.
- (i)
- The roll-on/roll-off removable system can self-move by its wheel. Therefore, a charging grid station for a battery system is not needed to be built in the coastal area. In addition, the flexibility in building position can help to avoid big tides or typhoons in the coastal area.
- (ii)
- Due to the limitation of the energy density of the battery, it is inefficient to use batteries to operate the main propulsion engines operating on unspecified routes. Therefore, the car ferry interconnecting islands would yield significant profit with specific routes.
- (iii)
- The cost investment of the battery system can be reduced due to the removable battery that can be shared. In addition, the mismatch problem between battery replacement life and the operating life of the ship can be solved.
6. Conclusions
- (i)
- Readers can have an idea of the detailed system level energy flow infrastructure for the F-EBP car ferry. This work will help in deciding the operating range of the system voltage level for the DC grid by selecting the C-rate level.
- (ii)
- This work offers readers the idea on how to link C-rate level with the propulsion motor and other system components in deciding component level initial physical parameters.
- (iii)
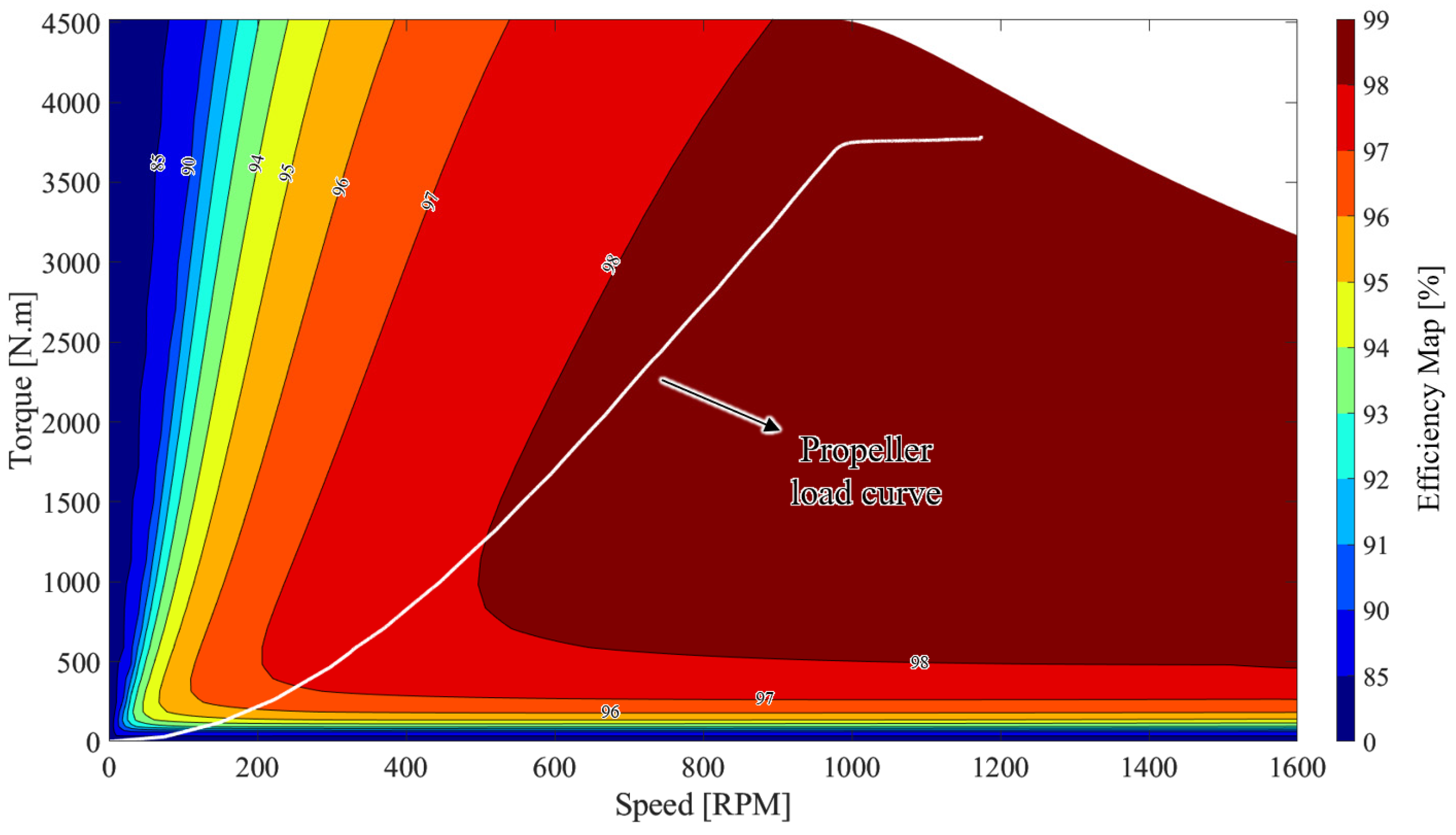
- An in-depth multiphysics design of the propulsion motor considering system level requirements is also showcased. The operating curve of the propeller and motor are compared to discuss the efficiency. This information is useful in upgrading the ongoing research on the full electrification of the shipping industry.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- UNCTAD. Review of Maritime Report 2021; UNITED NATIONS: New York, NY, USA, 2021. [Google Scholar]
- Polakis, M.; Zachariadis, P.; de Kat, J.O. The Energy Efficiency Design Index (EEDI). In Sustainable Shipping; Springer International Publishing: Cham, Switzerland, 2019; pp. 93–135. [Google Scholar]
- IMO. IMO Update: Marine Environment Protection Committee—MEPC 76. Int. Marit. Organ. 2021, 10, 1–5. Available online: https://www.dnv.com/news/imo-update-marine-environment-protection-committee-mepc-76-203128 (accessed on 2 February 2023).
- Yang, C. Policies, Regulatory Framework and Enforcement for Air Quality Management: The Case of China-Environment Working Paper No. 157. 2020. Available online: https://www.oecd-ilibrary.org/environment/policies-regulatory-framework-and-enforcement-for-air-quality-management-the-case-of-korea_8f92651b-en (accessed on 2 February 2023).
- Tobergte, D.R.; Curtis, S. IGU World LNG Report—2017. J. Chem. Inf. Model. 2017, 53, 1689–1699. Available online: https://www.igu.org/resources/igu-world-lng-report-2017/ (accessed on 19 March 2023).
- The Economist. Green Finance for Dirty Ships|The Economist. 2017. Available online: https://www.economist.com/finance-and-economics/2017/03/11/green-finance-for-dirty-ships (accessed on 4 February 2023).
- 2016 Environmental Statistics Yearbook. Available online: https://www.keep.go.kr/portal/144?action=read&action-value=f3364998bebc6a71da71a184ecf97829&tags=통계 (accessed on 4 February 2023).
- Kolodziejski, M.; Michalska-Pozoga, I. Battery Energy Storage Systems in Ships’ Hybrid/Electric Propulsion Systems. Energies 2023, 16, 1122. [Google Scholar] [CrossRef]
- Xu, L.; Guerrero, J.M.; Lashab, A.; Wei, B.; Bazmohammadi, N.; Vasquez, J.C.; Abusorrah, A. A Review of DC Shipboard Microgrids—Part I: Power Architectures, Energy Storage, and Power Converters. IEEE Trans. Power Electron. 2022, 37, 5155–5172. [Google Scholar] [CrossRef]
- Sulligoi, G.; Vicenzutti, A.; Menis, R. All-Electric Ship Design: From Electrical Propulsion to Integrated Electrical and Electronic Power Systems. IEEE Trans. Transp. Electrif. 2016, 2, 507–521. [Google Scholar] [CrossRef]
- Seung-ho, J. 2018 Annals of Marine Fisheries Statistics-Korean. 2018. Available online: https://www.mof.go.kr/article/view.do?articleKey=23987&boardKey=32&menuKey=396¤tPageNo=1 (accessed on 5 February 2023).
- Kirtley, J.L.; Banerjee, A.; Englebretson, S. Motors for Ship Propulsion. Proc. IEEE 2015, 103, 2320–2332. [Google Scholar] [CrossRef]
- Hassannia, A.; Darabi, A. Design and performance analysis of superconducting rim-driven synchronous motors for marine propulsion. IEEE Trans. Appl. Supercond. 2014, 24, 2280346. [Google Scholar] [CrossRef]
- Banerjee, A.; Tomovich, M.S.; Leeb, S.B.; Kirtley, J.L. Power converter sizing for a switched doubly fed machine propulsion drive. IEEE Trans. Ind. Appl. 2015, 51, 248–258. [Google Scholar] [CrossRef]
- Park, J.H.; Lee, T.W.; Jeong, Y.H.; Hong, D.K. Novel Multi-Physics Computational Simulation of a 10 kW Permanent Magnet Motor for Podded Propulsion. Energies 2022, 15, 6607. [Google Scholar] [CrossRef]
- Chasiotis, I.D.; Karnavas, Y.L. A generic multi-criteria design approach toward high power density and fault-tolerant low-speed PMSM for pod applications. IEEE Trans. Transp. Electrif. 2019, 5, 356–370. [Google Scholar] [CrossRef]
- Bianchi, N.; Bolognani, S.; Ružojčić, B. Design of a 1000 HP Permanent Magnet Synchronous Motor for Ship Propulsion. 2009. Available online: https://ieeexplore.ieee.org/document/5279055 (accessed on 2 February 2023).
- Zhang, Z.; Guo, H.; Liu, Y.; Zhang, Q.; Zhu, P.; Iqbal, R. An Improved Sensorless Control Strategy of Ship IPMSM at Full Speed Range. IEEE Access 2019, 7, 178652–178661. [Google Scholar] [CrossRef]
- Lee, J.G.; Lim, D.K.; Jung, H.K. Analysis and Design of Interior Permanent Magnet Synchronous Motor Using a Sequential-Stage Magnetic Equivalent Circuit. IEEE Trans. Magn. 2019, 55, 2922043. [Google Scholar] [CrossRef]
- Ouldhamrane, H.; Charpentier, J.F.; Khoucha, F.; Zaoui, A.; Achour, Y.; Benbouzid, M. Optimal Design of Axial Flux Permanent Magnet Motors for Ship RIM-Driven Thruster. Mach. Mach. 2022, 10, 932. [Google Scholar] [CrossRef]
- Hong, J.P.; Kim, Y.S.; Shim, H.W.; Kang, H.J.; Kim, Y.; Kim, G.B.; Cho, S. Study on a Fully Electrified Car Ferry Design Powered by Removable Battery Systems Considering Domestic Coastal Environment. J. Ocean Eng. Technol. 2021, 35, 1–12. [Google Scholar] [CrossRef]
- Choi, J.; Kim, Y.-S.; Hwang, D.; Heo, J.; Lee, J. Electric Propulsion System Design of an Electric-Powered Car Ferry. Korean Electr. Soc. Conf. Proc. 2021, 1291–1292. Available online: https://www.dbpia.co.kr/journal/articleDetail?nodeId=NODE10610177 (accessed on 4 February 2023).
- Paul, S.; Chang, J.; Bang, D. Performance of Urban Water-Pipeline Energy Harvester System Considering Electromagnetic-Mechanical Design. IEEE Trans. Energy Convers. 2022, 37, 389–402. [Google Scholar] [CrossRef]
- Bertotti, G. General properties of power losses in soft ferromagnetic materials. IEEE Trans. Magn. 1987, 24, 621–630. [Google Scholar] [CrossRef]
- Steentjes, S.; Boehmer, S.; Hameyer, K. Permanent magnet eddy-current losses in 2-D FEM simulations of electrical machines. IEEE Trans. Magn. 2015, 51, 2362551. [Google Scholar] [CrossRef]
- Lipo, T.A. Introduction to AC Machine Design; Willey-IEEE Press: Piscataway, NJ, USA, 2018. [Google Scholar]
- Available online: https://www.altair.com/flux (accessed on 19 March 2023).
- Choi, J.; Son, Y.; Kim, D.-J.; Park, B.; Ji-Won, K.; Lee, J. Ship dynamics Analysis and Test Results of an Electric-powered Car Ferry. Korean Electr. Soc. Conf. Proc. 2022, 1375–1376. Available online: https://www.dbpia.co.kr/journal/articleDetail?nodeId=NODE11145686 (accessed on 4 February 2023).
- Staton, D.A.; Cavagnino, A. Convection Heat Transfer and Flow Calculations Suitable for Electric Machines Thermal Models. IEEE Trans. Ind. Electron. 2008, 55, 3509–3516. [Google Scholar] [CrossRef] [Green Version]
- Boglietti, A.; Cavagnino, A.; Staton, D. Determination of critical parameters in electrical machine thermal models. IEEE Trans. Ind. Appl. 2008, 44, 1150–1159. [Google Scholar] [CrossRef]
- Staton, D.; Boglietti, A.; Cavagnino, A. Solving the More Difficult Aspects of Electric Motor Thermal Analysis in Small and Medium Size Industrial Induction Motors. IEEE Trans. Energy Convers. 2005, 20, 620–628. [Google Scholar] [CrossRef] [Green Version]
- Cengel, Y.A. Heat Transference a Practical Approach. MacGraw-Hill 2004, 4, 874. [Google Scholar] [CrossRef]
- Viking Lady. Available online: https://www.wartsila.com/marine/customer-segments/references/offshore/viking-lady (accessed on 19 March 2023).
- Vision of the Fjords-The Hybrid Ferry. Available online: https://www.vatnahalsen.no/en/vision-fjords (accessed on 19 March 2023).
- FCS Alsterwasser—Zemships. Available online: https://webgate.ec.europa.eu/life/publicWebsite/index.cfm?fuseaction=search.dspPage&n_proj_id=3081 (accessed on 19 March 2023).
- Hybrid Propulsion Shuttle Tanker. Available online: https://businessnorway.com/solutions/teekay-shuttle-tankers-use-their-own-emissions-as-fuel (accessed on 19 March 2023).
- Color Hybrid. Available online: https://www.ship-technology.com/projects/color-hybrid-ferry/ (accessed on 19 March 2023).
- Engineering Tomorrow—Future of the Fjords Meets 2026 Emission Targets, Today. Available online: https://www.danfoss.com/en/service-and-support/case-stories/dds/future-of-the-fjords-meets-2026-emission-targets-today/ (accessed on 19 March 2023).
- Brødrene Aa and the Fjords Pioneering with “Future of The Fjords”—Offering Zero Emission Fjord Cruise. Available online: https://mozees.no/wp-content/uploads/2019/05/Article-Future-of-The-Fjords-med-tittelside.pdf (accessed on 19 March 2023).
- Ellen—The World’s Largest E-Ferry. Available online: https://www.euronews.com/2019/11/25/meet-ellen-the-world-s-largest-e-ferry-connecting-two-danish-islands-without-emitting-any (accessed on 10 October 2020).
- M/S Sjovagen—Electric Powered Ferry. Available online: https://www.portstrategy.com/new-electric-ferry-unveiled-in-sweden/90260.article (accessed on 19 March 2023).
- Anwar, S.; Zia, M.Y.I.; Rashid, M.; Rubens, G.Z.D.; Enevoldsen, P. Towards Ferry Electrification in the Maritime Sector. Energies 2020, 13, 6506. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | |
|---|---|---|
| Electromagnetic Performance | Rated Output Power (kW) | 500 |
| Rated Rotational Speed (rpm) | 1200 | |
| Rated Current (Arms) | 630 | |
| Current Density (Arms/mm2) | 3~5 | |
| Geometric Parameters and Materials | Stator Outer Diameter (mm) | 540 |
| Axial Stacking Length (mm) | 646 | |
| Airgap (mm) | 2.5 | |
| Core Material | 35PN250 | |
| Permanent Magnet | N38UH | |
| Slot/Pole | 45/6 |
| Parameters | Value | |
|---|---|---|
| Electromagnetic Performance | Torque (kNm) | 4.04 |
| Torque ripple (%) | 8.2 | |
| Output power (kW) | 508 | |
| Efficiency (%) | 98.4 | |
| Power factor (%) | 88 | |
| Loss Component | Copper Loss (kW) | 6.9 |
| Core Loss (kW) | 1.45 | |
| PM Loss (W) | 43 | |
| Mechanical Loss (kW) | 500 |
| Coolant: Water | |||
|---|---|---|---|
| Volume Flow Rate (L/min) | Inlet Temperature (°C) | Thermal Conductivity (W/m/°C) | Specific Heat (J/kg/°C) |
| 50 | 26 | 0.6076 | 4180 |
| Motor Part | Thermal Conductivity (W/m/°C) | Specific Heat (J/kg/°C) | Density (kg/m3) |
|---|---|---|---|
| Housing | 167 | 700 | 2680 |
| Motor Cover | 51.9 | 133 | 7700 |
| Rotor, Stator Core | 75 | 460 | 7600 |
| Winding-Cooling Channel | 401 | 385 | 8933 |
| Winding Insulation | 0.21 | 1000 | 1400 |
| Slot Liner—Nomex | 0.14 | 1300 | 1400 |
| Shaft | 51.9 | 133 | 7700 |
| Rotor Plate | 16.3 | 460 | 7800 |
| Magnet | 7.6 | 460 | 7600 |
| Power System Configuration | Ship Name | Power Source Capacity | Bus Voltage (VDC) | Passengers/Cars | Speed (Knots) | Motor Capacity (kW) | ||
|---|---|---|---|---|---|---|---|---|
| G/E (kW) | FC (kW) | BSS (kWh) | ||||||
| Hybrid-Electric Propulsion | Viking Lady [33] | 4 × 1950 | 2 × 450 | - | 690 | 25/- | 15.5 | unknown |
| Vision of the Fjords [34] | 2 × 749 | 2 × 288 | 600 | unknown | 399/- | 19.5 | PM motor: 2 × 150 | |
| FSC Alsterwasser [35] | unknown | unknown | 200 | unknown | 100/- | 8 | unknown | |
| MV Catriona [36] | unknown | - | 700 | 400 | 150/23 | 9 | PM motor: 2 × 375 | |
| Fixed Battery | MF Ampere [37] | - | - | 1040 | 850–1050 | 360/120 | 10 | unknown |
| Future of the Fjords [38,39] | - | - | 1800 | unknown | 400/- | 16 | PM motor: 2 × 450 | |
| Ellen [40] | - | - | 4300 | unknown | 200/- | 21 | unknown | |
| M/S Sjovagen [41] | - | - | 500 | unknown | 150/- | 9 | unknown | |
| Removable Battery | Target Ship | - | - | 1600 | 870 | 100/20 | 10 | 2 × 500 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tran, V.-K.; Paul, S.; Lee, J.-W.; Choi, J.-H.; Han, P.-W.; Chun, Y.-D. System-Level Consideration and Multiphysics Design of Propulsion Motor for Fully Electrified Battery Powered Car Ferry Propulsion System. Electronics 2023, 12, 1491. https://doi.org/10.3390/electronics12061491
Tran V-K, Paul S, Lee J-W, Choi J-H, Han P-W, Chun Y-D. System-Level Consideration and Multiphysics Design of Propulsion Motor for Fully Electrified Battery Powered Car Ferry Propulsion System. Electronics. 2023; 12(6):1491. https://doi.org/10.3390/electronics12061491
Chicago/Turabian StyleTran, Vu-Khanh, Sarbajit Paul, Jae-Woon Lee, Jae-Hak Choi, Pil-Wan Han, and Yon-Do Chun. 2023. "System-Level Consideration and Multiphysics Design of Propulsion Motor for Fully Electrified Battery Powered Car Ferry Propulsion System" Electronics 12, no. 6: 1491. https://doi.org/10.3390/electronics12061491