
Dynamic Target Tracking of Small UAVs in Unstructured Environment

Abstract
:1. Introduction
2. System Framework and Research on Tracking Method
2.1. DTE-Tracker Design
2.2. Dynamic Result Monitor and Target Recapture
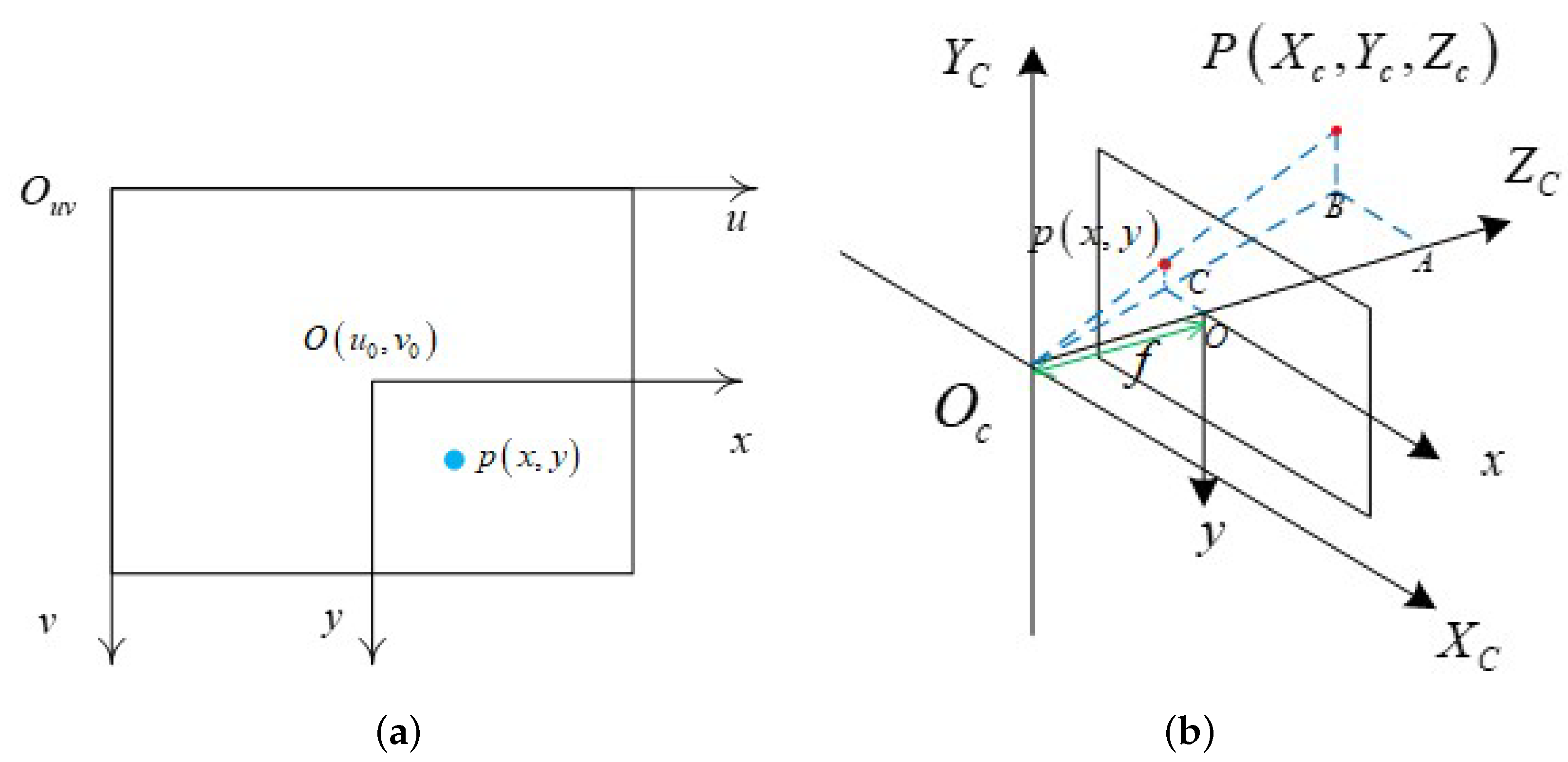
2.3. Target Location Based on RGB-D Camera
3. DWA Path Planning Based on Dynamic Target Tracking
4. Stable Tracking Experiment of Target in Jungle Environment
4.1. Hardware Platform
4.2. DTE-Tracker Experiment
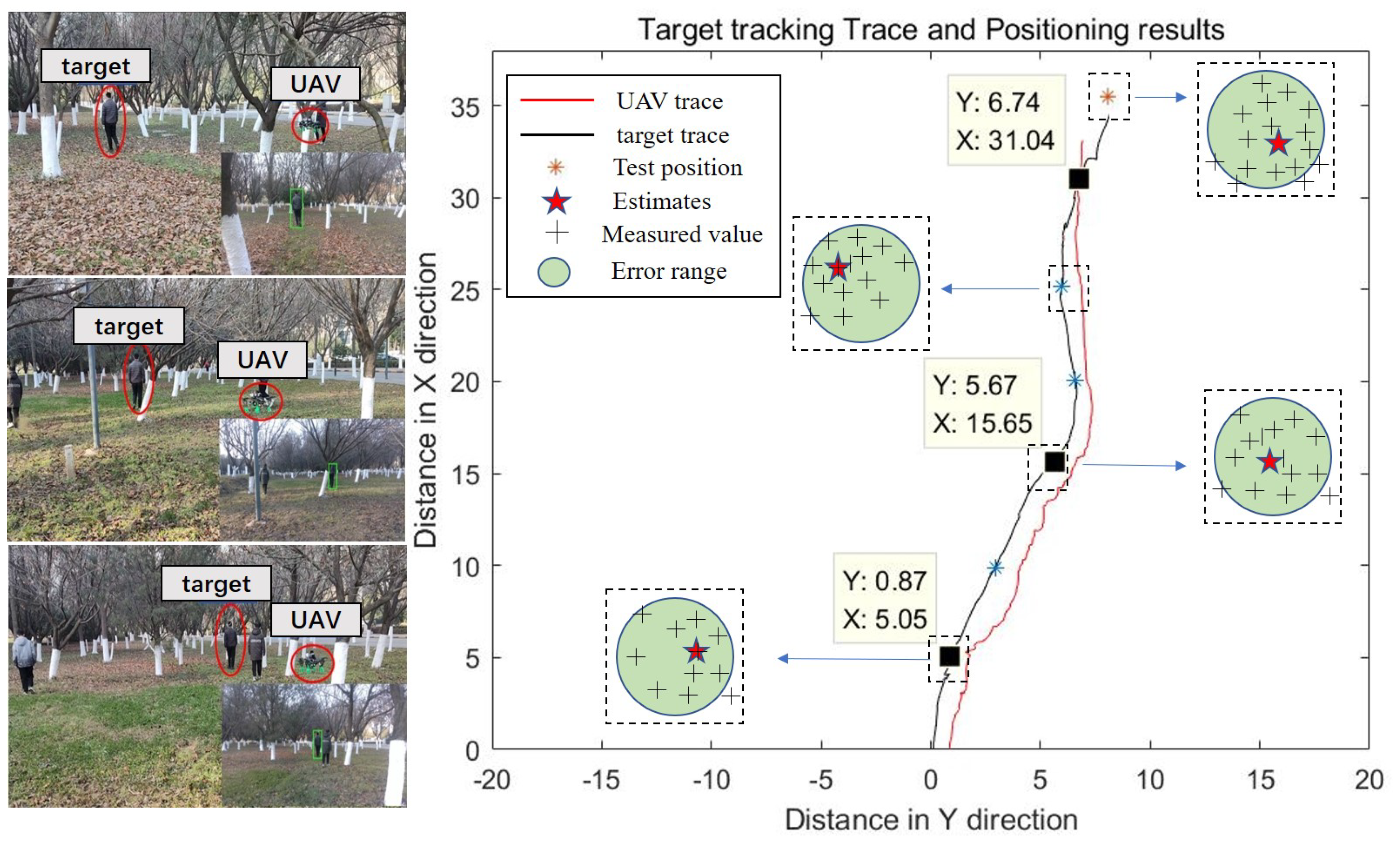
4.3. Positioning and Path Planning Experiment
5. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sadykova, D.; Pernebayeva, D.; Bagheri, M.; James, A. IN-YOLO: Real-time detection of outdoor high voltage insulators using UAV imaging. IEEE Trans. Power Deliv. 2019, 35, 1599–1601. [Google Scholar] [CrossRef]
- Zhang, Y.; Yuan, X.; Li, W.; Chen, S. Automatic power line inspection using UAV images. Remote Sens. 2017, 9, 824. [Google Scholar] [CrossRef] [Green Version]
- Chen, H.; Lan, Y.; Fritz, B.K.; Hoffmann, C.; Liu, S. Review of agricultural spraying technologies for plant protection using unmanned aerial vehicle (UAV). Int. J. Agric. Biol. Eng. 2021, 14, 38–49. [Google Scholar] [CrossRef]
- Jiang, N.; Wang, K.; Peng, X.; Yu, X.; Wang, Q.; Xing, J.; Li, G.; Zhao, J.; Guo, G.; Han, Z. Anti-UAV: A large multi-modal benchmark for UAV tracking. arXiv 2021, arXiv:2101.08466. [Google Scholar]
- Blösch, M.; Weiss, S.; Scaramuzza, D.; Siegwart, R. Vision based MAV navigation in unknown and unstructured environments. In Proceedings of the IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 21–28. [Google Scholar]
- Liu, C.; Song, Y.; Guo, Y.; Xu, B.; Zhang, Y.; Li, L.; Li, Z. Vision information and laser module based UAV target tracking. In Proceedings of the IECON 2019-45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; Volume 1. [Google Scholar]
- Zhao, X.; Pu, F.; Wang, Z.; Chen, H.; Xu, Z. Detection, tracking, and geolocation of moving vehicle from uav using monocular camera. IEEE Access 2019, 7, 101160–101170. [Google Scholar] [CrossRef]
- Quintero, S.A.P.; Hespanha, J.P. Vision-based target tracking with a small UAV: Optimization-based control strategies. Control Eng. Pract. 2014, 32, 28–42. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Wang, Q.; Hu, H.; He, Y. A novel real-time moving target tracking and path planning system for a quadrotor UAV in unknown unstructured outdoor scenes. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 2362–2372. [Google Scholar] [CrossRef] [Green Version]
- Giusti, A.; Guzzi, J.; Ciresan, D.C.; He, F.-L.; Rodríguez, J.P.; Fontana, F.; Faessler, M.; Forster, C.; Schmidhuber, J.; Di Caro, G.; et al. A machine learning approach to visual perception of forest trails for mobile robots. IEEE Robot. Autom. Lett. 2016, 1, 661–667. [Google Scholar] [CrossRef] [Green Version]
- Voigtlaender, P.; Luiten, J.; Torr, P.H.S.; Leibe, B. Siam r-cnn: Visual tracking by re-detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 6578–6588. [Google Scholar]
- Ultralytics-Yolov5. Available online: https://github.com/ultralytics/yolov5 (accessed on 1 January 2021).
- Zagoruyko, S.; Komodakis, N. Learning to compare image patches via convolutional neural networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015. [Google Scholar]
- Li, B.; Yan, J.; Wu, W.; Zhu, Z.; Hu, X. High performance visual tracking with siamese region proposal network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Ma, N.; Zhang, X.; Zheng, H.-T.; Sun, J. Shufflenet v2: Practical guidelines for efficient cnn architecture design. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 116–131. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef] [Green Version]
- Fox, D.; Burgard, W.; Thrun, S. The dynamic window approach to collision avoidance. IEEE Robot. Autom. Mag. 1997, 4, 23–33. [Google Scholar] [CrossRef] [Green Version]
- Han, D. Research on Human Tracking Technology of Mobile Robot Based on Visual Object Tracking; Zhejiang University: Hangzhou, China, 2021. [Google Scholar]
- Yan, B.; Zhao, H.; Wang, D.; Lu, H.; Yang, X. ‘Skimming-Perusal’ Tracking: A Framework for Real-Time and Robust Long-Term Tracking. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 2385–2393. [Google Scholar]
- Zhu, Z.; Wang, Q.; Li, B.; Wu, W.; Yan, J.; Hu, W. Distractor-aware siamese networks for visual object tracking. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 101–117. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Module | Detector | Tracker | Examiner | DTE-Tracker |
|---|---|---|---|---|
| average time cost (ms/frame) | 42.8 | 35.6 | 18.3 | 51.7 |
| Short Time Occlusion | The Target Disappears | |
|---|---|---|
| Total number of challenges | 34 | 17 |
| Judge success times | 31 | 17 |
| Judge the success rate | 91.2% | 100% |
| Number of re-tracking | – | 15 |
| Re-tracking success rate | – | 88.2% |
| SPLT [21] | DaSiamRPN [22] | SiamRPN | DTE-Tracker | |
|---|---|---|---|---|
| The success rate | 73.0% | 70.8% | 61.1% | 72.3% |
| FPS | 2.1 | 23.7 | 31.2 | 25.1 |
| Number | Ground Truth | Estimates | Mean Error | Proportion |
|---|---|---|---|---|
| 1 | (5.13, 0.81) | (5.05, 0.87) | 0.10 | 0.91 |
| 2 | (9.80, 2.84) | (9.85, 2.93) | 0.11 | 0.86 |
| 3 | (15.36, 5.55) | (15.65, 5.67) | 0.31 | 0.89 |
| 4 | (20.16, 6.87) | (20.09, 6.58) | 0.29 | 0.94 |
| 5 | (24.94, 6.25) | (25.18, 5.99) | 0.34 | 0.93 |
| 6 | (31.38, 6.53) | (31.04, 6.74) | 0.39 | 0.88 |
| 7 | (35.35, 8.22) | (35.64, 8.43) | 0.36 | 0.96 |
| Parameter Name | Parameter Value | Parameter Name | Parameter Value |
|---|---|---|---|
| Sampling time | 0.2 s | 1.0 s | |
| 0.8 m/s | −0.3 m/s | ||
| 0.5 rad/s | 0.03 rad/s | ||
| 0.5 m/s | 0.5 m/s | ||
| 0.3 rad/s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Yang, M.; Li, Y.; Dai, L.; Zhao, C. Dynamic Target Tracking of Small UAVs in Unstructured Environment. Electronics 2023, 12, 1078. https://doi.org/10.3390/electronics12051078
Li H, Yang M, Li Y, Dai L, Zhao C. Dynamic Target Tracking of Small UAVs in Unstructured Environment. Electronics. 2023; 12(5):1078. https://doi.org/10.3390/electronics12051078
Chicago/Turabian StyleLi, Haiqing, Mengbo Yang, Yanbo Li, Liming Dai, and Chunhui Zhao. 2023. "Dynamic Target Tracking of Small UAVs in Unstructured Environment" Electronics 12, no. 5: 1078. https://doi.org/10.3390/electronics12051078