1. Introduction
Compared to classical mechanical bearings, active magnetic bearings (AMBs) offer unique properties due to lack of mechanical contact and have, therefore, attracted immense interest in research and industry. They offer advantages like drastically reduced friction on the rotor, no mechanical wear, reduced noise, low maintenance cost, and no lubrication required as well as increased efficiency and higher rotational speed when applied to electrical machines [
1]. Thus, the economic and ecological impact of those machines can be improved significantly. The here-considered AMBs are based on magnetic reluctance forces, and according to Earnshwas theorem, a purely passive suspension is therefore not feasible [
2]. Hence, reluctant-force-based AMBs require control algorithms with position feedback in order to stabilise the rotor at the centre position [
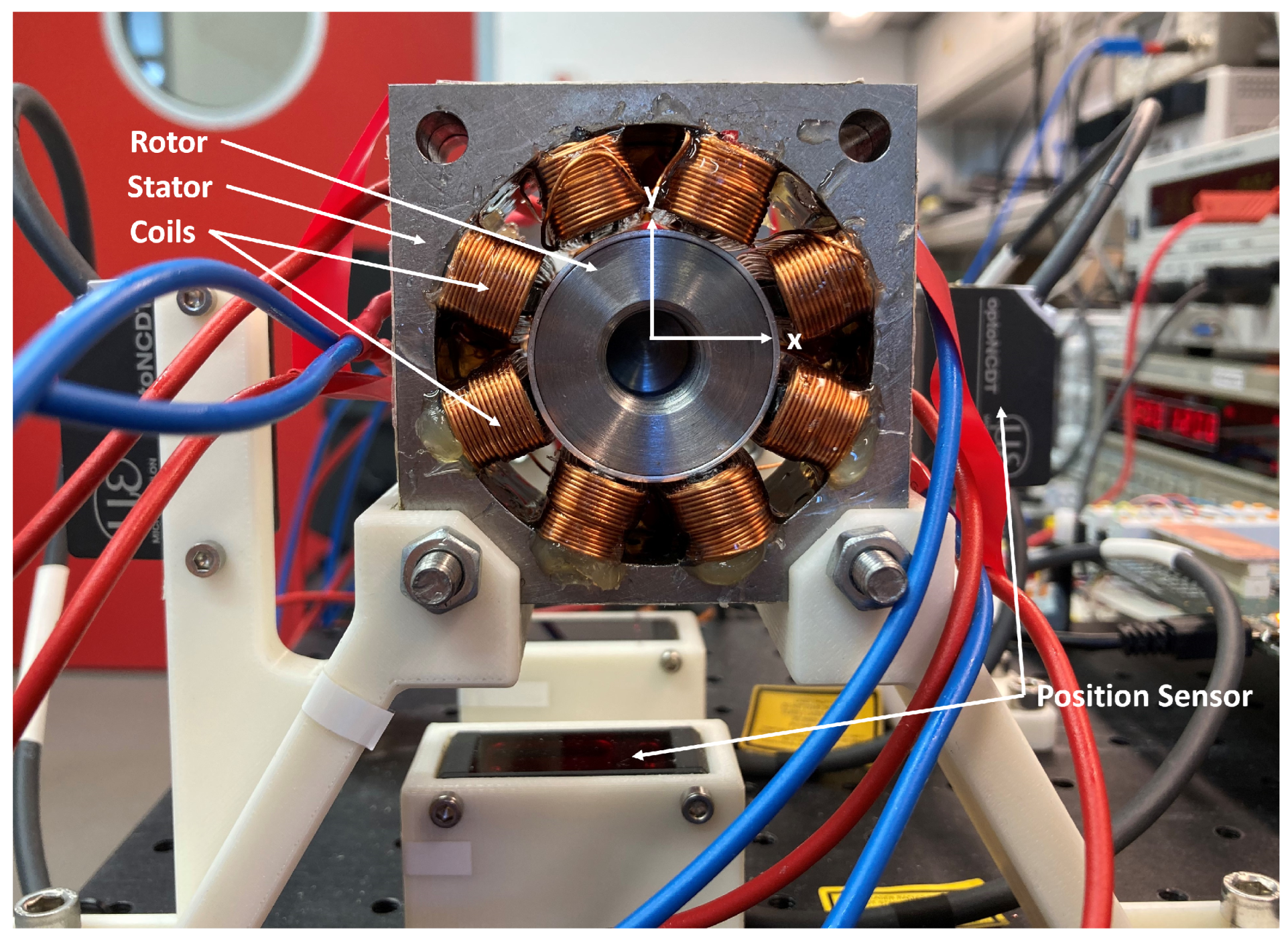
1]. The position feedback is realised conventionally by additional sensors such as laser- or hall-effect sensors. However, sensors often are costly and require installation space and maintenance effort of the overall system, therefore weakening the economic merits of AMBs. In the past decades, sensorless control has been widely applied to AMBs to retrieve position information from electrical quantities already being measured in the system. Such a self-sensing approach can replace position sensors in cost-critical applications or provide further redundancy with existing position sensors in cases where high functional safety is required.
In the field of electrical machines, sensorless algorithms developed over the past decades are either based on the induced back-EMF or machine anisotropies. The review works [
3,
4,
5] provide a good overview of existing techniques. In particular, there is a technique, which successfully exploits the star-point voltage and modified pulse width modulation (PWM). In some literature this technique is called Direct Flux Control [
6,
7,
8,
9,
10,
11].
These works demonstrate the robustness, accuracy and increased signal-to-noise ratio (SNR) of this approach. More in detail, there is another circuitry based on a re-settable integrator circuit that allows to amplify the star-point voltage with increased SNR. This approach seems interesting for future research works. Nevertheless, the technique requires not only an accessible star-point but also the modification of the PWM pattern, used to introduce zero voltage vectors and explicit, active voltage vectors for measurement. This puts several requirements on the switching power amplifier used. In a previous publication, such a power amplifier was introduced and validated [
12]. The experimental validation of this driving approach showed satisfactory results. A detailed report can be found in [
12].
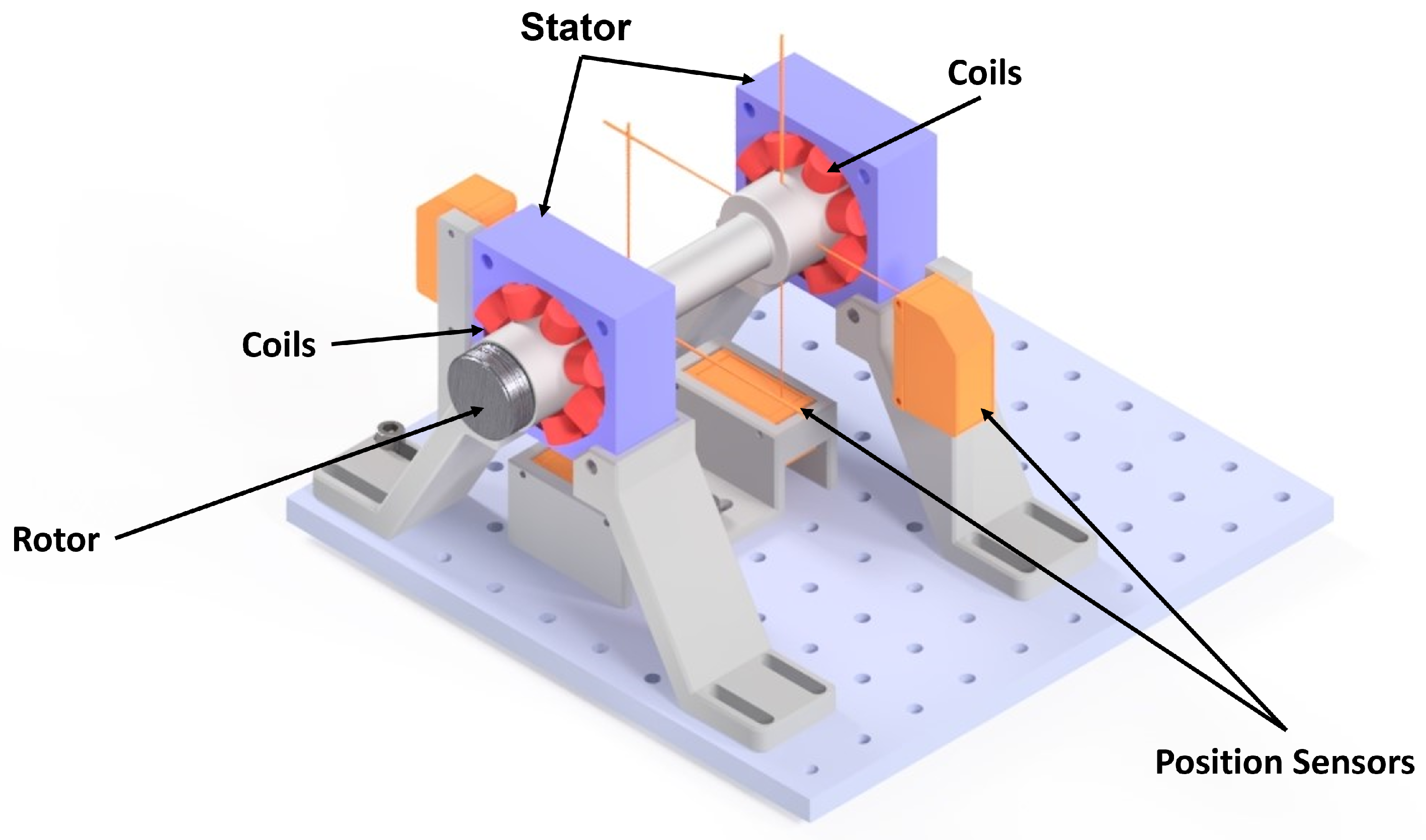
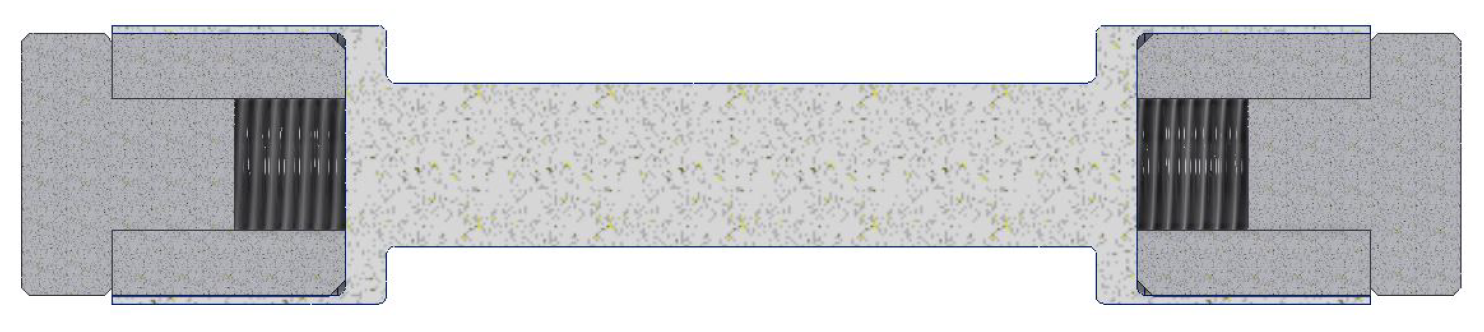
The aim of this work is to provide an elaborate position control strategy for the star-connected AMB. Since the test bench utilised in this application will also be used for teaching and demonstrating porpuses, a relatively large air gap has been chosen. This allows to observe the motion of the rotor with bare eyes and makes the technology easier accessible for students. In addition, the production of mechanical parts with higher tolerances is cost-effective and even enables the use of rapid prototyping. Thus, the control algorithm must be robust enough to compensate for the strong non-linearities of the AMB system. The most employed position controller in industrial applications is a Proportional Integral Derivative (PID) controller [
1]. This type of controller is generally widely spread, well-documented and well-known by many engineers, making it easy to apply and tune. The PID controller delivers suitable and sufficient control performance for many fundamental applications. However, a review of active magnetic bearing control strategies finds that the PID controller cannot keep up with the demands of the most recent applications [
13]. That is especially true for high-speed applications. This issue calls for novel control strategies for active magnetic bearings, which can stabilise the rotor at high speeds and reduce vibrations in the system. One way to achieve a better performance of the PID controller is the latter’s extension. The PID controller can be extended using fuzzy logic [
14]. A comparison between PID and fuzzy-PID finds a better performance and lower energy consumption in the case of the fuzzy-PID controller [
15]. Another way of improving the PID controller’s performance is using a neural network to update the controller’s gain during operation. A study finds good control performance and robustness to uncertainties compared to a plain PID controller [
16]. A third method to extend the PID controller is fractional order control [
17]. A study investigated the performance of a fractional order PID controller and found a distinct reduction of vibration compared to the plain PID controller [
18]. A different control strategy is Flatness-Based control [
19]. Experiments show a good performance considering trajectory tracking problems where the rotor is not held at a constant reference position but follows a given reference trajectory [
20,
21]. A further control strategy that gained attention is sliding mode control [
22]. Experiments show a good disturbance rejection ability and good robustness to model uncertainties [
23,
24].
Comparing the different possibilities, the sliding mode control strategy seems most interesting for further research, because of its good robustness to model and parameter uncertainties, which is especially important with regard to the large air gap, since it induces strong non-linearities. Further, its lower computational and tuning effort, compared to strategies like fractional order PID control, makes it more easily applicable. Sliding mode control in all its varieties has been widely deployed to active magnetic bearings. Recent developments in sliding mode control focus on the theoretical and practical development of higher order sliding mode control algorithms, the discrete time implementation of sliding mode control and the application of sliding mode control to multi agent systems [
25,
26]. Similar to the PID controller, there are techniques that extend the sliding mode controller by adjusting its gains in order to ensure robustness and a finite time convergence on AMBs [
26,
27,
28].
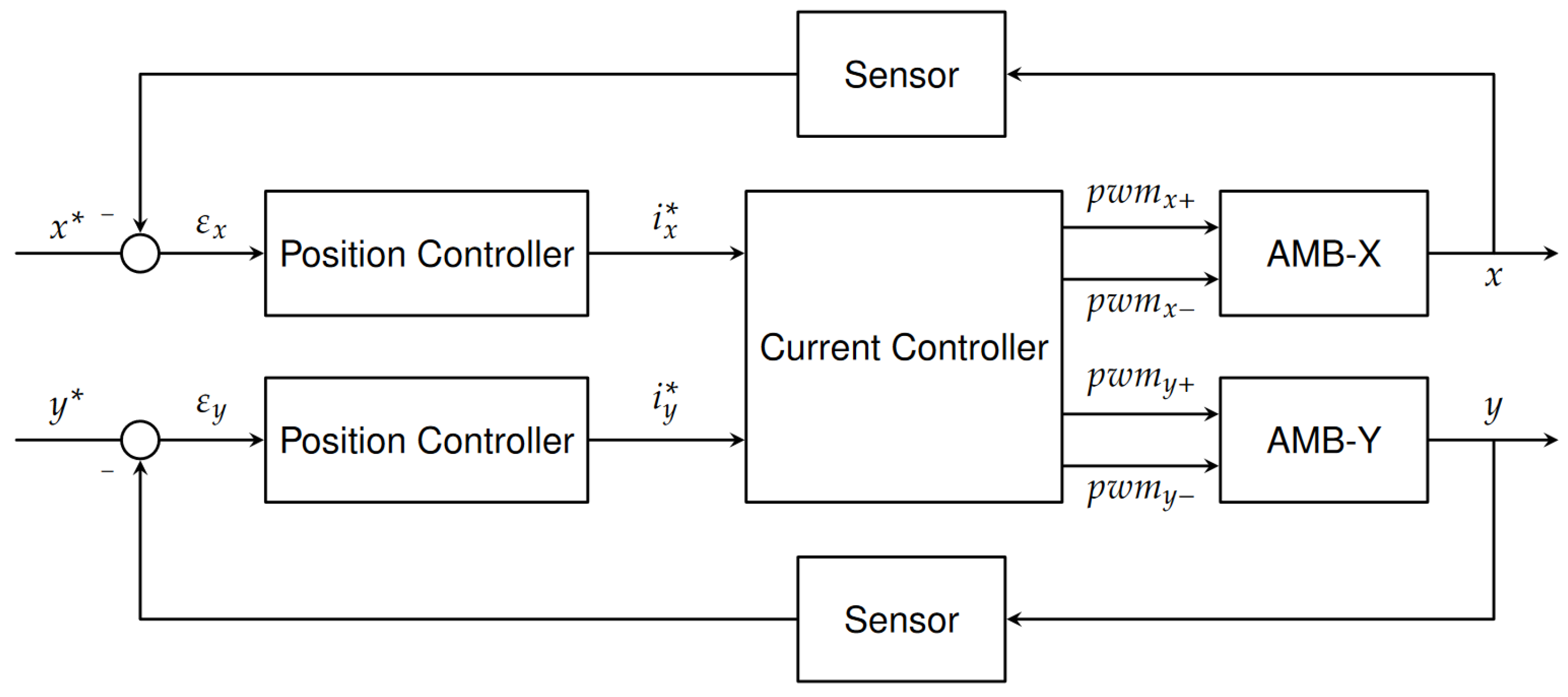
Many state of the art control strategies for AMBs rely on voltage control, where the cascading control loop, consisting of a position and a current controller, is integrated into one controller. This strategy is known to be beneficial for the overall performance of the AMB system [
1]. On the other hand, integrating the current controller into the position controller makes it impossible to influence the current reference directly. However, the exertion of influence on the current reference can be beneficial for safety reasons, as the maximum current can easily be restricted. Further, the current controller can be tuned using a well-known industrial design criterion, which guarantees a specific and predefined current behaviour. An additional current limiting controller could also provide additional safety in the case of voltage control, but the current dynamics will still not feature a predefined behaviour.
To not leave behind the potential performance benefits, the aim is to integrate the dynamics of the current controller into the position controller model. This forms a cascading control loop consisting of a current controller with predefined behaviour, according to an industrial criterion and a position controller, that is aware of the current controller’s dynamics. A further potential benefit of the explicit current controller is the smoothing of the current reference from the sliding mode controller. Since sliding mode is known for its high-frequency switching nature, it seems beneficial to have a predefined bandwidth for the current dynamics. Especially since this control pattern will be used in further research regarding bandwidth-limited sensorless techniques.
Table A1 and
Table A2 provide a list of the used symbols and indices.
3. Controller Design
The goal is now, to design a controller that drives the rotor to the referenced position and stabilises it. As mentioned in the previous section, the AMB model is fraught with uncertainties. Further, the AMB has a highly nonlinear behaviour that has been linearised in the operating point. However, since the operating point is left in phases such as the startup, large parameter deviations must be taken into account. For these reasons, sliding mode control has been chosen for its robustness against model and parameter uncertainties.
After the desired dynamics were derived previously, the sliding variable can be introduced:
Sliding mode control aims to drive to zero in finite time by employing a control law . In the case of the AMB, the controller output is equivalent to the current reference . Thus, sliding mode control can be considered a two-part controller design, consisting of a switching function and a control law .
For a system described in the state space
a switching function can be defined as
with
is a free parameter. Literature states that it is not entirely transparent, how to select a value for
in order to ensure a specific design criterion [
34]. However, there are well-studied systematic and traceable methods that provide a range of values for the design of
, one of which is the pole-placement method [
34,
35]. If a system is given in the previously mentioned controllability form, a suitable switching function is given by [
34]:
However, to counteract the widely differing magnitudes of the states, the switching function for the AMB is now chosen in a more general form as
This switching function results in a high-frequency switching motion in the control action, causing the so-called chattering phenomenon. On the other hand, the switching function is also the root of the robustness against parameter and model uncertainties. Having the current and its derivative integrated into the switching function, allows the sliding mode controller to counteract the otherwise unknown disturbances induced by the current control loop.
For the part of the control law, the conventional sliding mode is especially known for the chattering phenomenon. Chattering can be a severe issue in cascade control systems, such as a magnetic bearing with an explicit current controller [
35]. For this reason, the conventional sliding mode is considered unsuitable and second-order sliding mode is employed.
Figure 5 shows that, in contrast to the conventional sliding mode, second order sliding mode drives not only
to zero but also its derivative
. In theory, second-order sliding mode is free of chattering. In reality, however, discretisation and disturbances add residual chattering. Several algorithms induce a second-order sliding motion in the system. Since
needs to be driven to zero as well, additional measurements are often necessary. In reality, however, this is often not feasible because additional sensors would be needed. This narrows down the choice for a second-order sliding mode control algorithm. The only algorithm that does not require a measurement of
is the so-called super-twisting control algorithm. The algorithm is given by [
34,
35]:
The parameters
c and
b are positive scalar controller gains. The scalar
C symbolises the Lipschitz constant for unknown but bounded disturbances. Other than the conventional sliding mode, super twisting control is a continuous control algorithm. The high-frequency switching function is now hidden under the integral
The proposed controller design introduces the dynamics of the current control loop into the sliding mode controller without having to abandon the explicit current controller. This way, the proposed design tries to combine the advantages of the a current controlled schema, like easy exertion of influence on the current, with the performance boost of a voltage control schema.
5. Conclusions
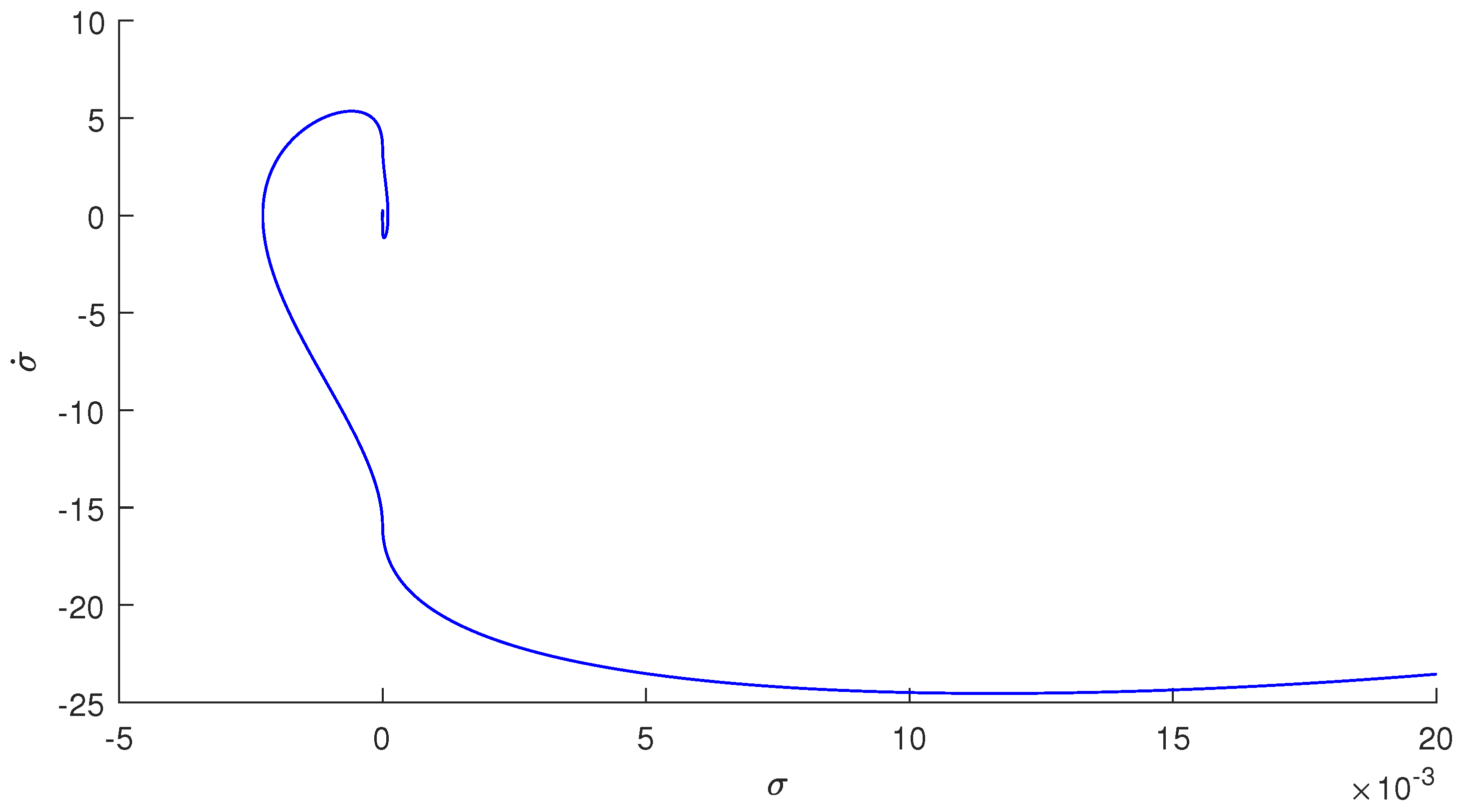
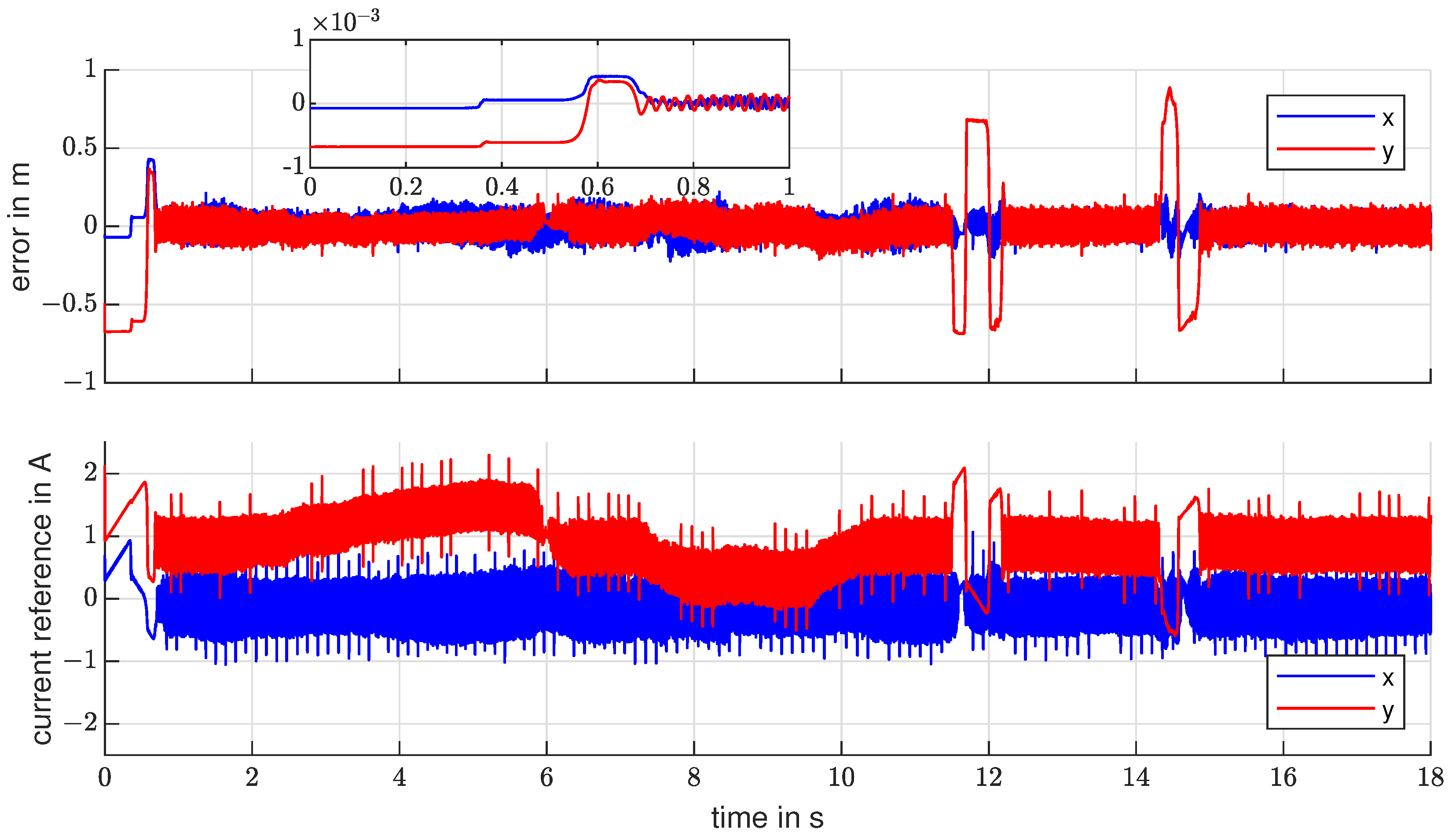
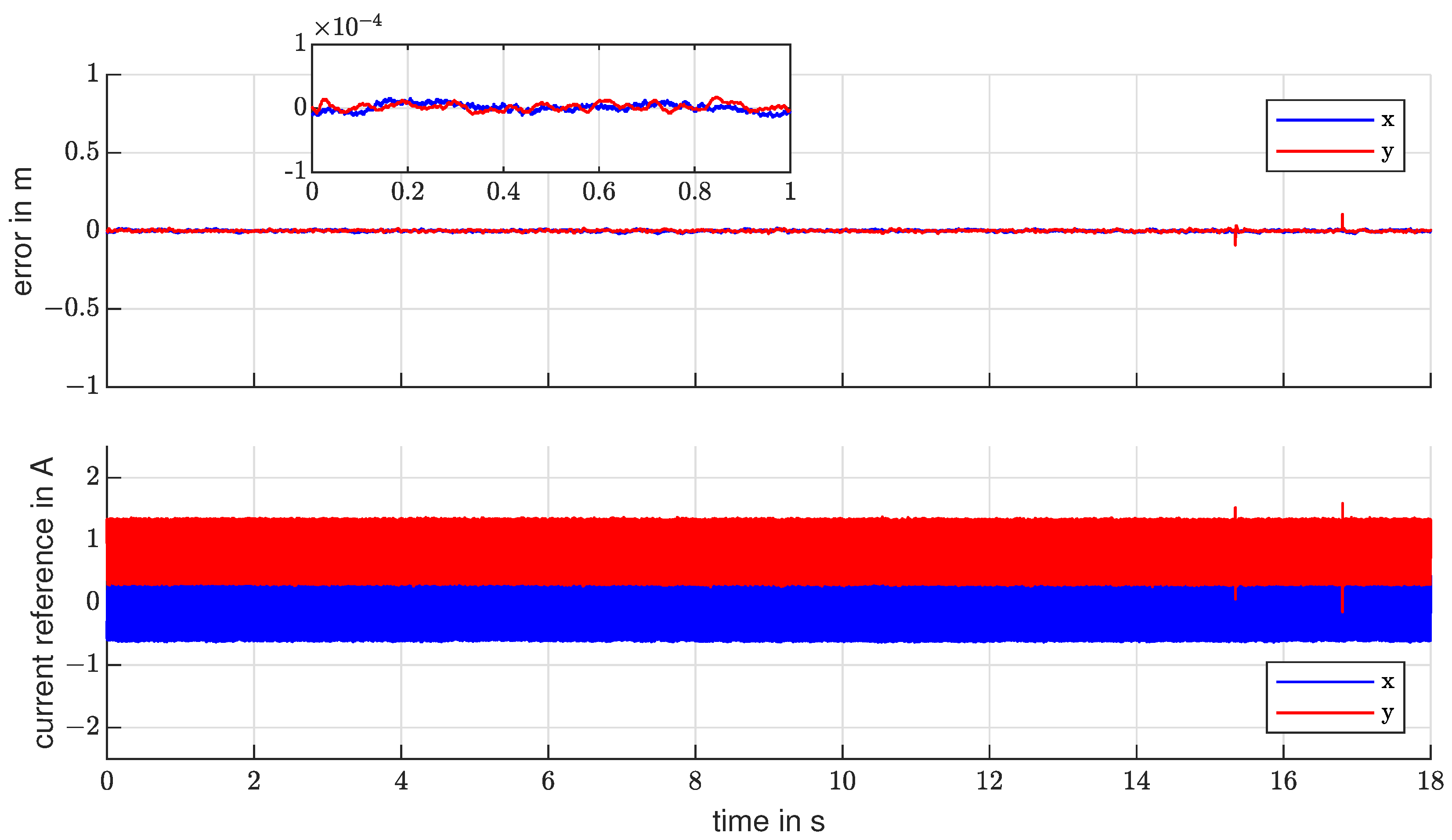
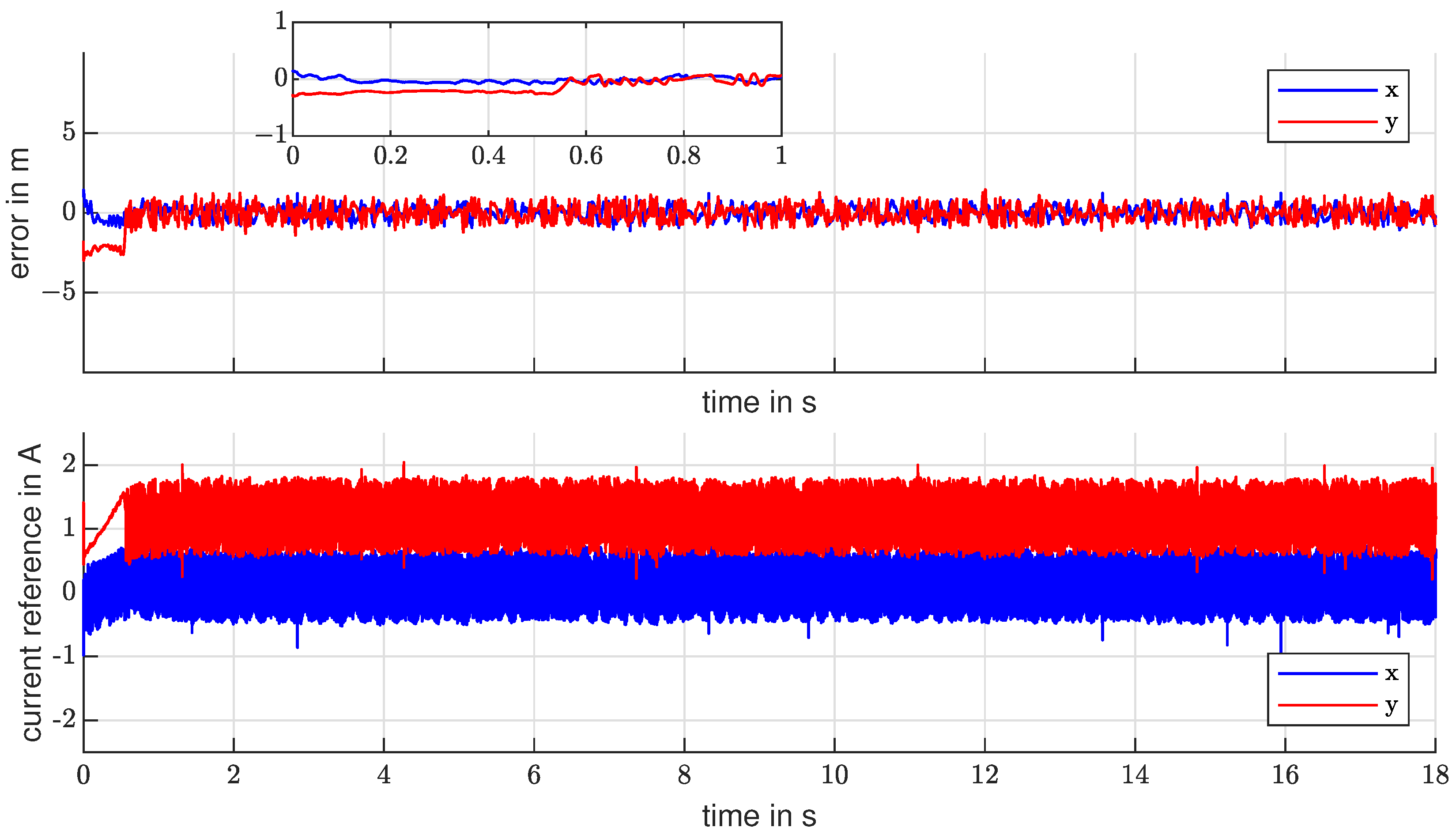
This work proposes a position control strategy for a four-phase star-connected AMB, that integrates the dynamics of the nested, explicit current controller into the position controller. In the experiments, the controller is able to lift from an initial rest position and to levitate the rotor around the reference position which proves to be robust against external disturbance forces. Further, the controller is robust enough to withstand the strong non-linearities and the left of the operating point during the touchdown and startup phases. This is particularly noteworthy because of the large air gap, which introduces large model parameter variations. Integrating the current controller dynamics improves the controller accuracy by about 87% letting the rotor oscillate around the reference position within the range of
m or 1% of the magnetic air gap size, considering only one bearing is operating. At the same time, the other is in rest position. On the other hand, the chattering frequency increased distinctly, rising up by 650% to 300 Hz. The amplitude of the chattering motion in the control reference
also gained approximately 40%. Considering both bearings operating, the rotor oscillates within
mm or 5% of the total air gap. The controller is able to recover from touchdown and rest position without external help. A study carried out with a similar model and similar model parameters for sliding mode control for AMBs gave consistent results for the system without current controller dynamics [
23]. Compared to this study the integration of the current controller dynamics reduces the trajectory range of the rotor in a stable position by about 83%.
The proposed controller provides increased performance for active magnetic bearing systems with star-connected coils and therefore allows the exploitation of the star point voltage for sensorless position estimation for AMBs. Latter will be the focus of further research. Further, the advancement of the position control strategy, for example by considering the now unmodelled dynamics of the rotor, will be studied.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}












