
Passification-Based Robust Phase-Shift Control for Two-Rotor Vibration Machine

Abstract
:1. Introduction
2. Mathematical Preliminaries
2.1. Stability Analysis
2.2. Speed-Gradient Method
2.3. SG Algorithms in Finite-Differential Form
2.4. Combined Algorithms for Adaptive Control with Implicit Reference Model
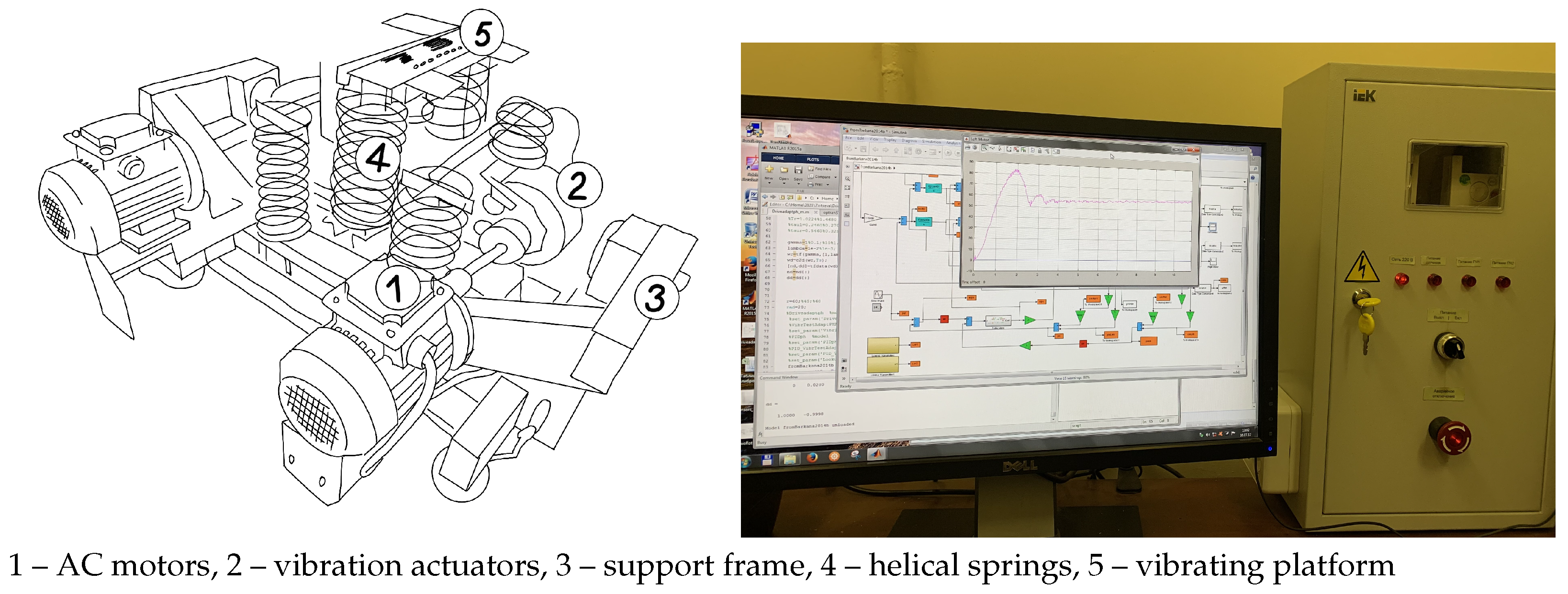
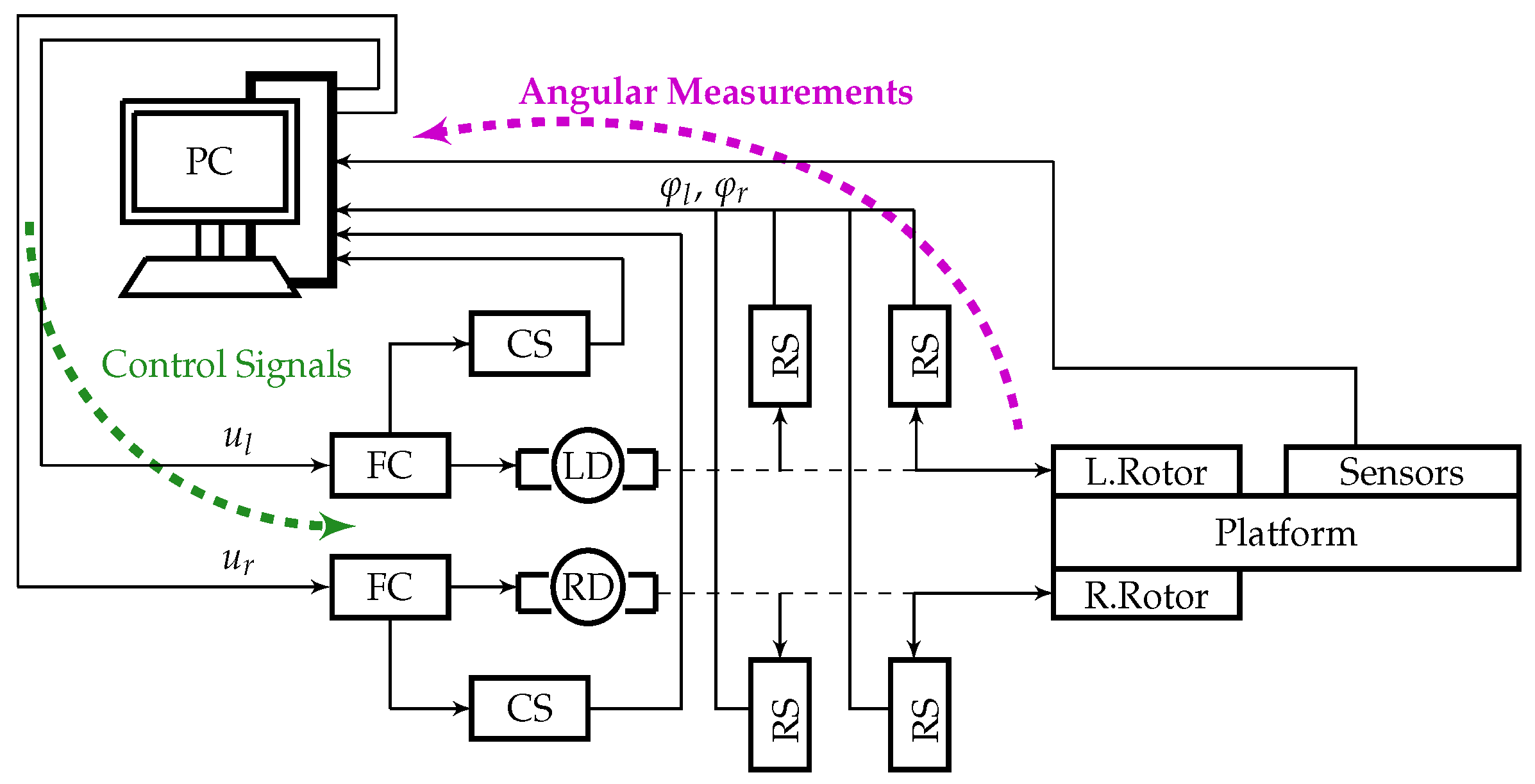
3. Experimental Setup: Two-Rotor Mechatronic Vibration Machine
3.1. Setup Description
3.2. Servo System Model
3.3. Identification of Motor Model Parameters
4. Synchronization and Phase Shift Control of Vibration Setup Actuators
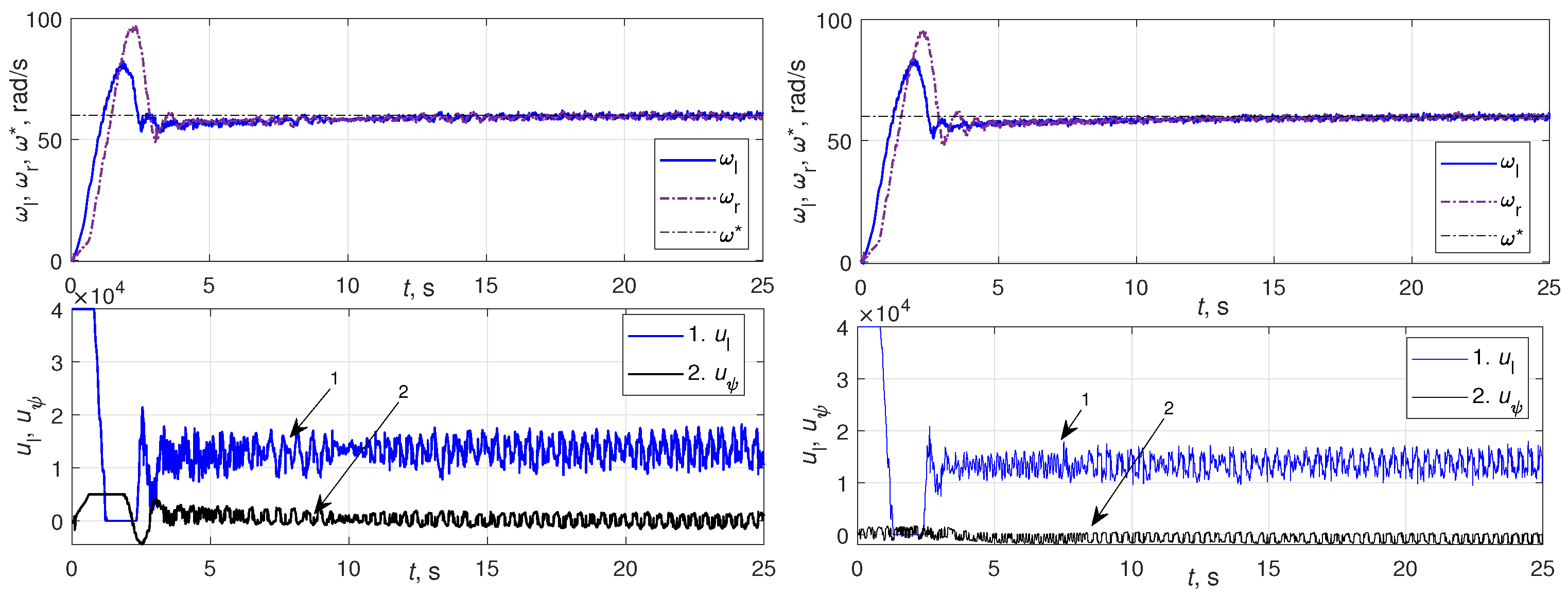
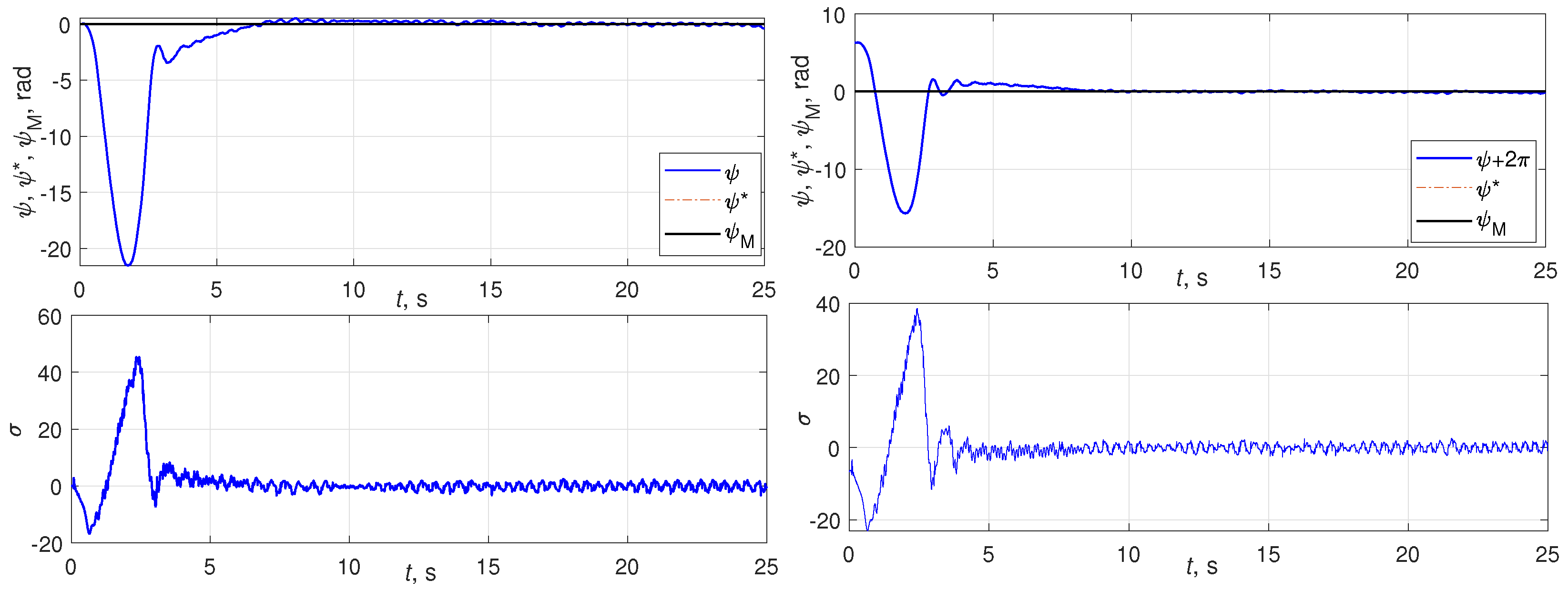
5. Numerical Examination and Experimental Results
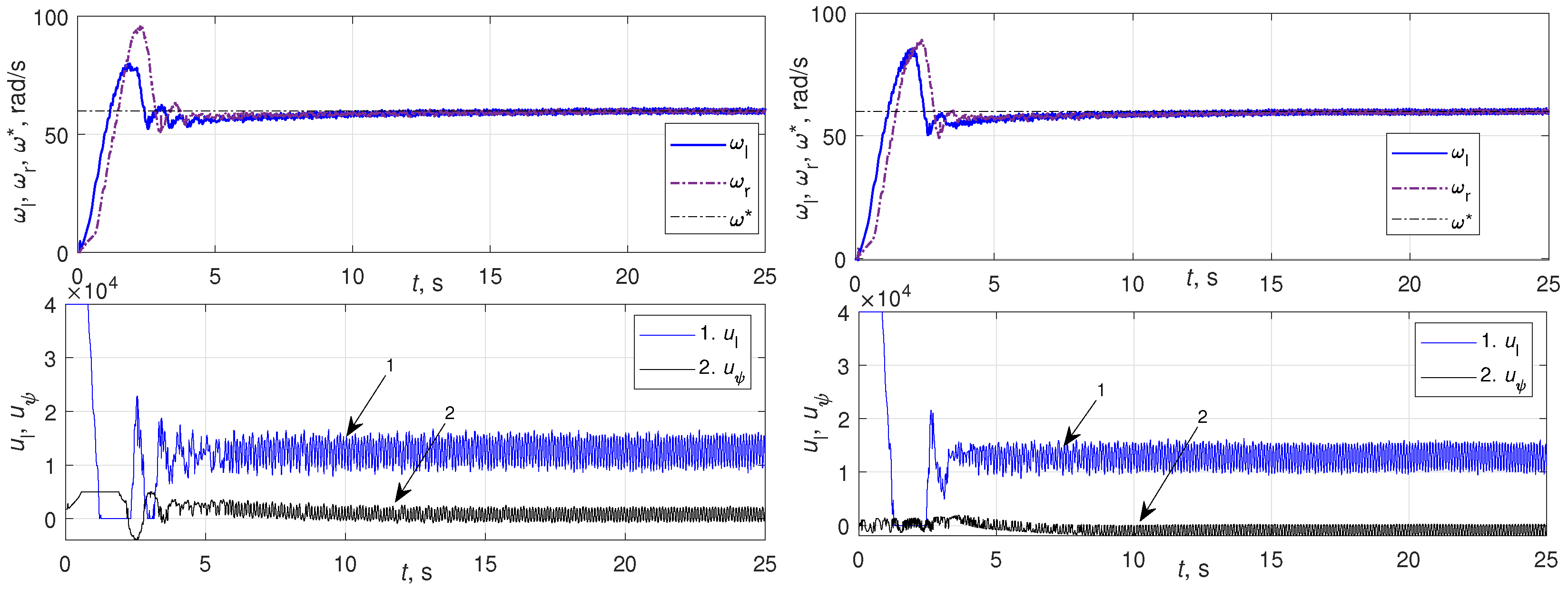
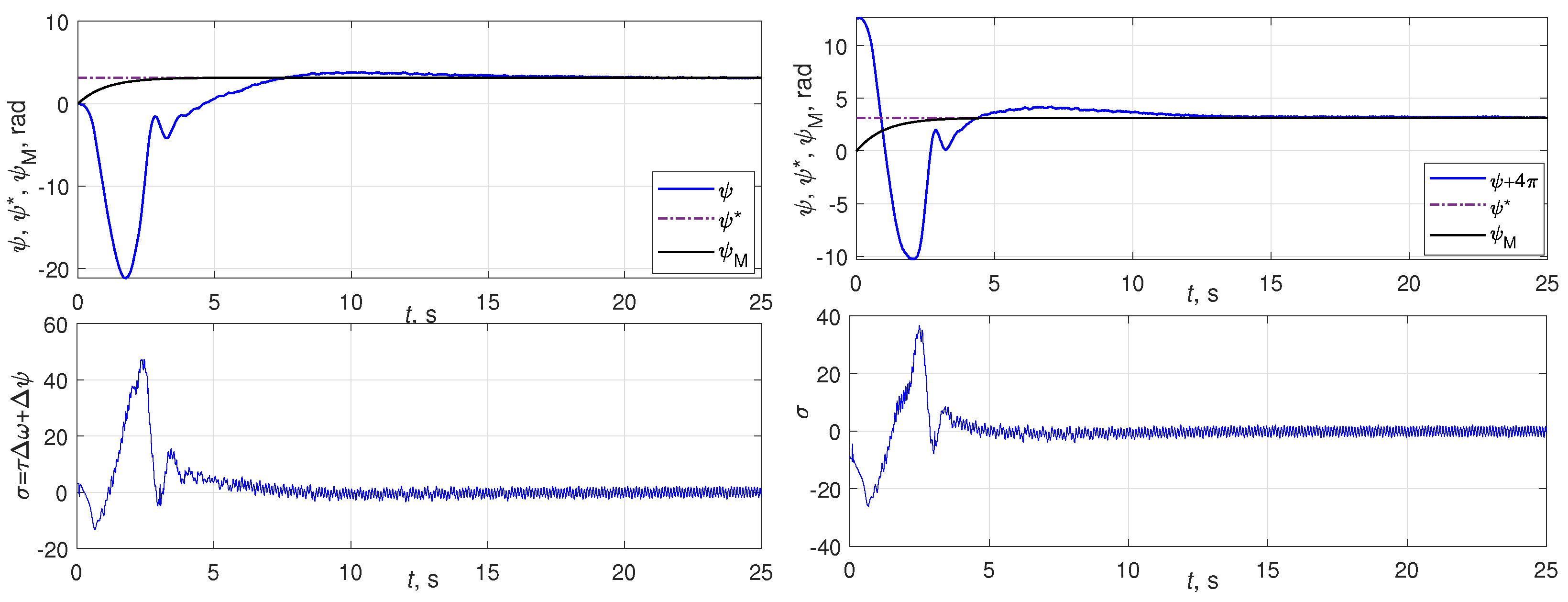
5.1. Case of Constant Reference Phase Shift
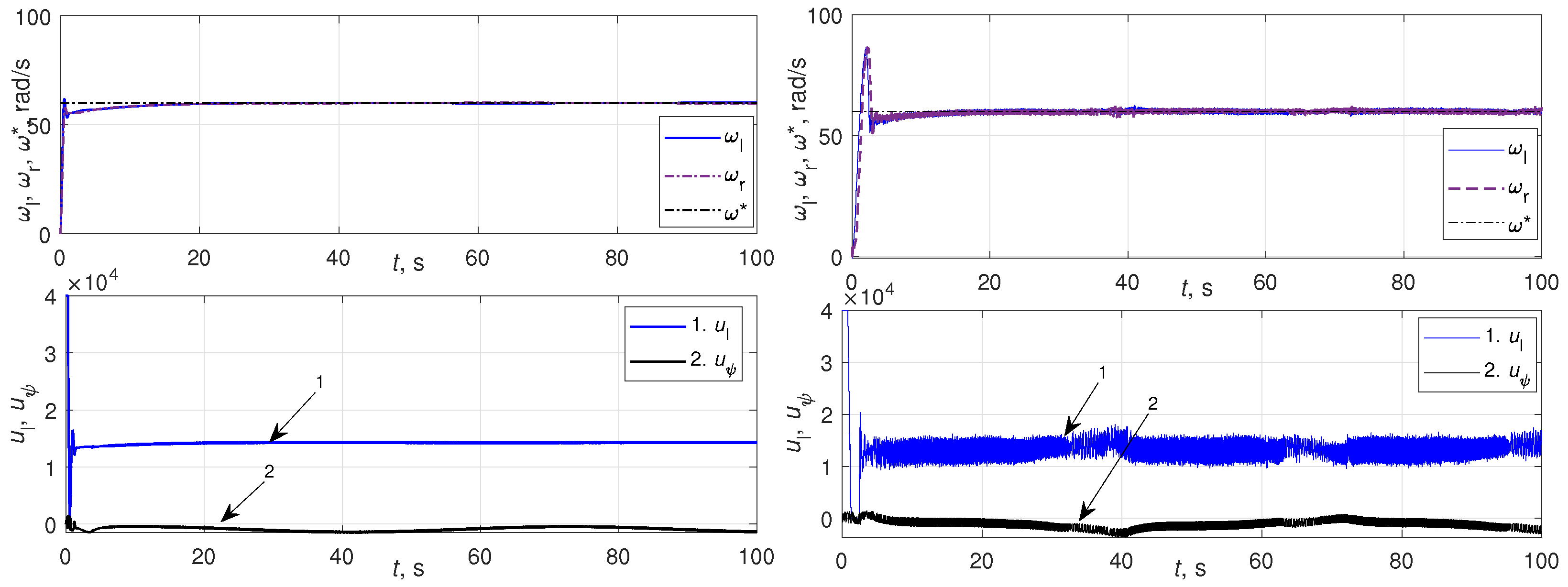
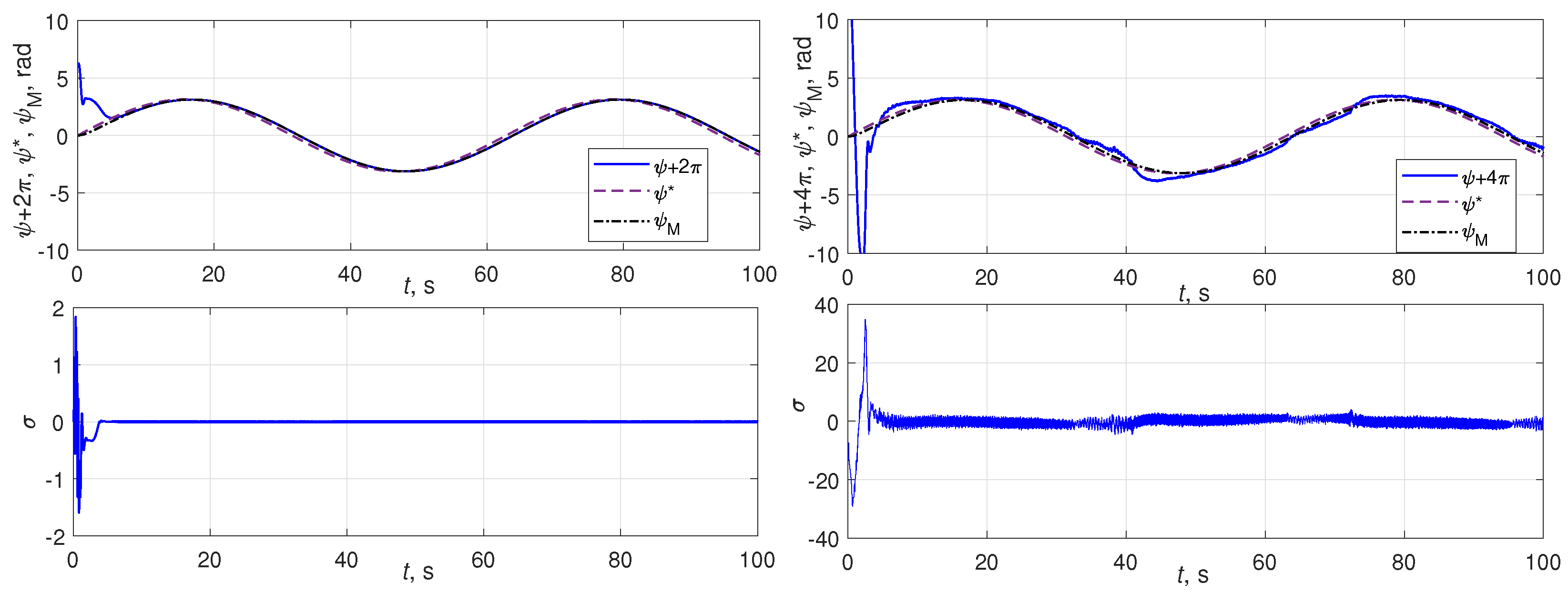
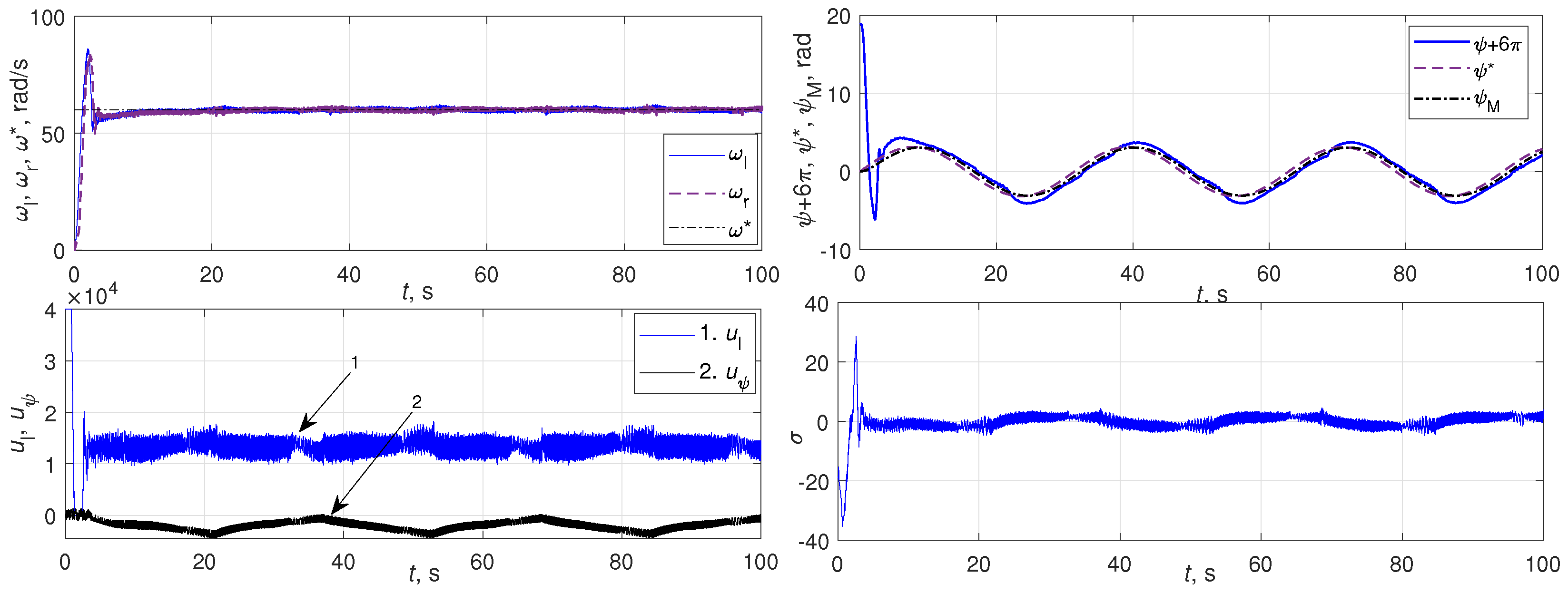
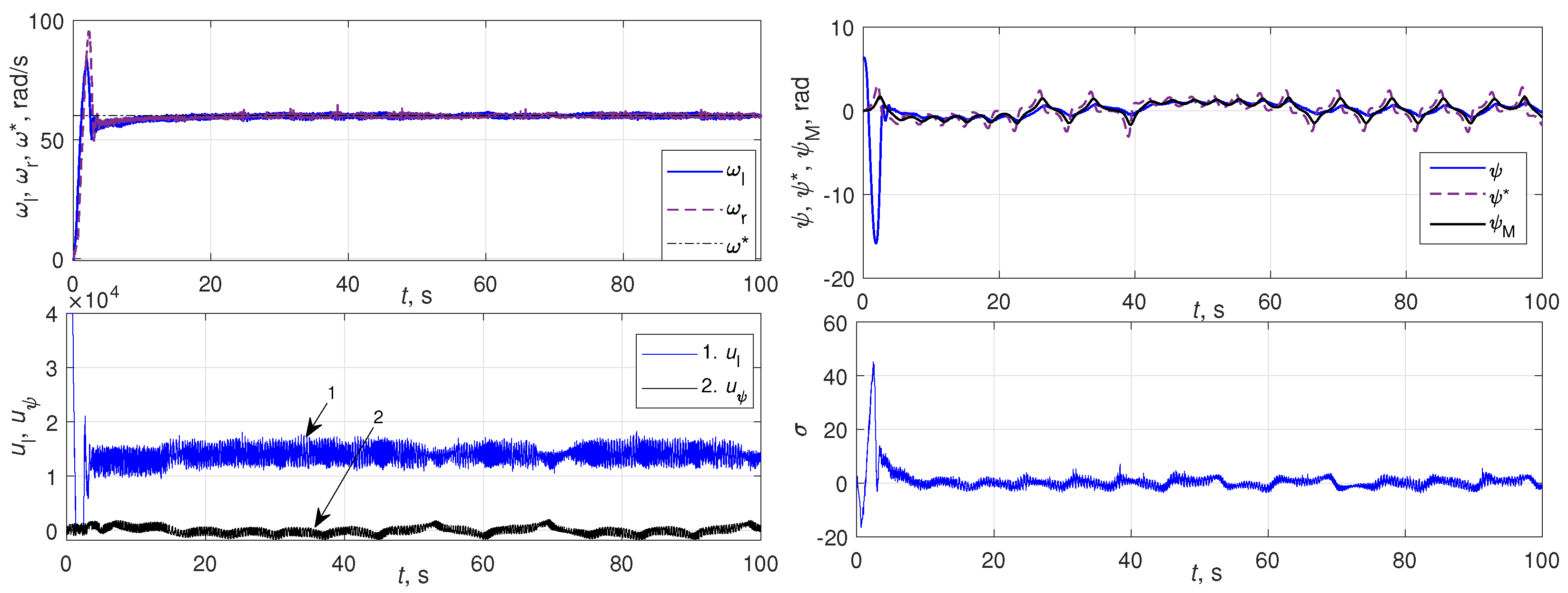
5.2. Case of Harmonic Reference Phase Shift
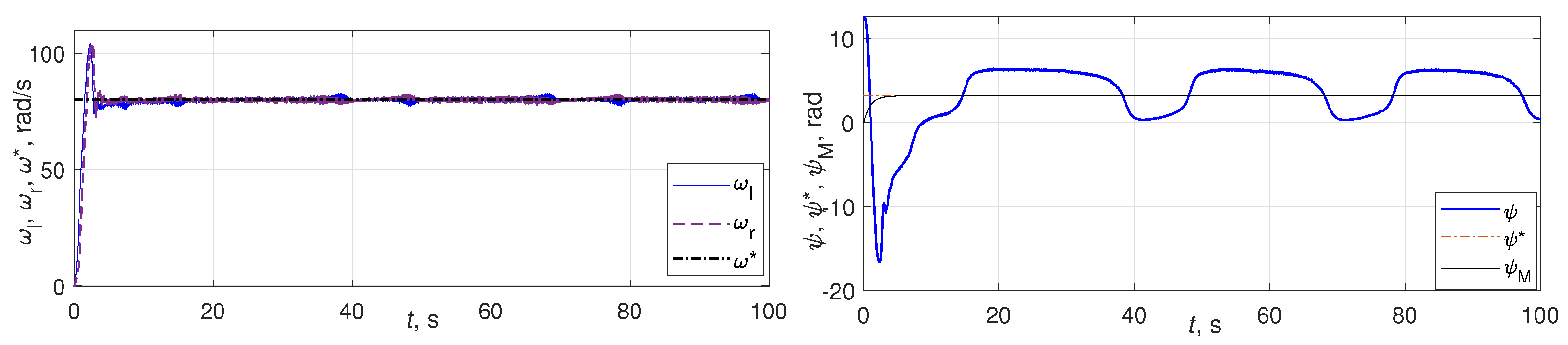
5.3. Case of Chaotic Reference Phase Shift
5.4. Limitations of the Proposed Solution
5.5. Robustness Analysis
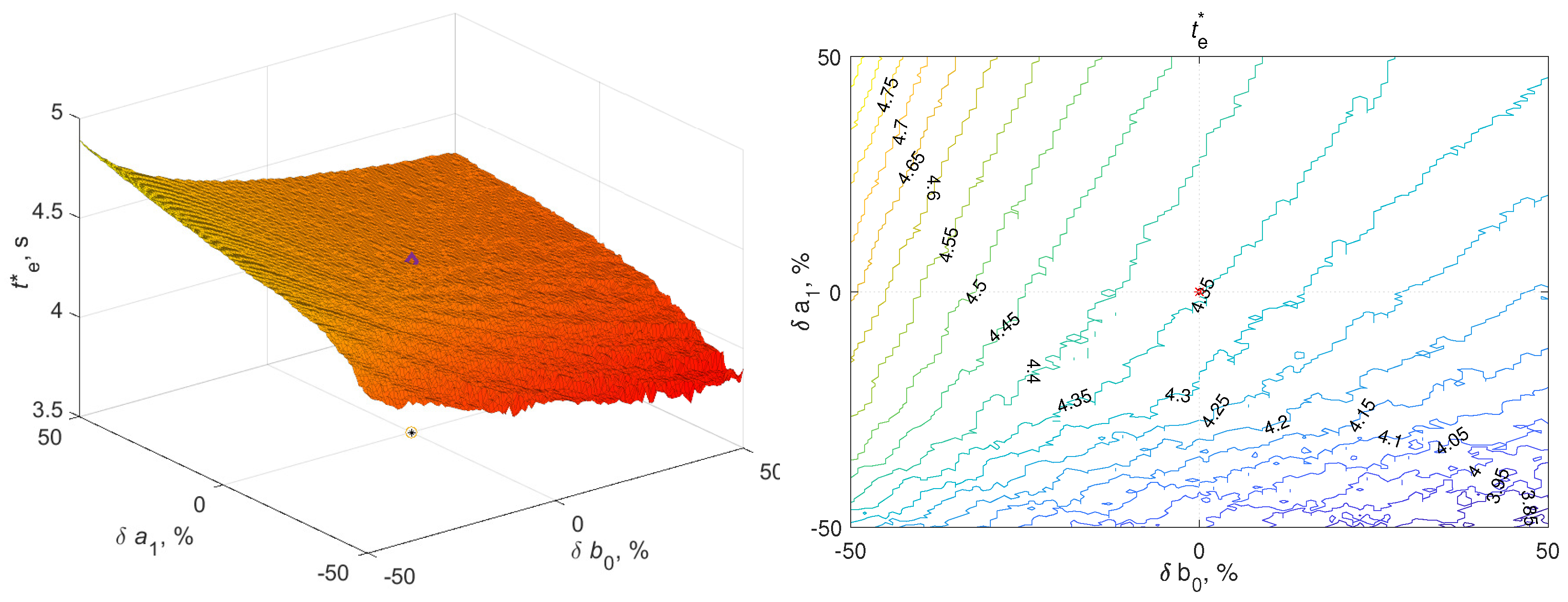
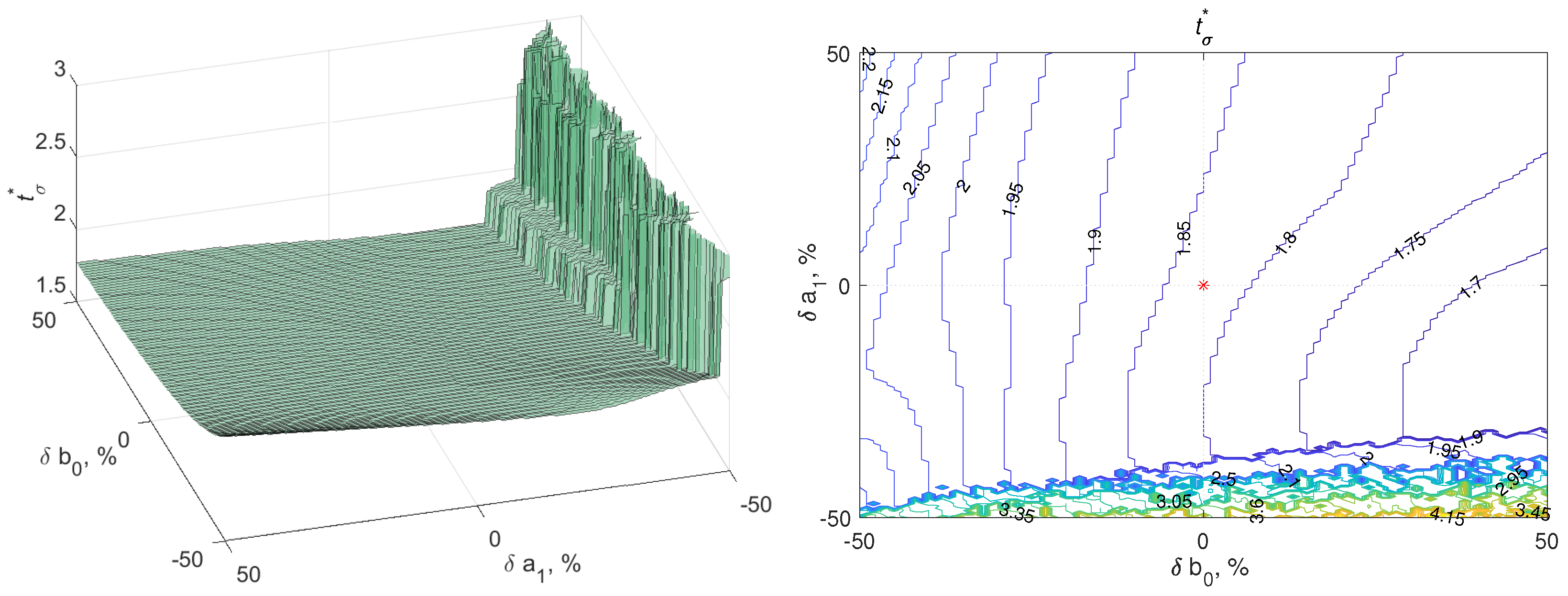
5.5.1. Robustness with Respect to Plant Model Parameters
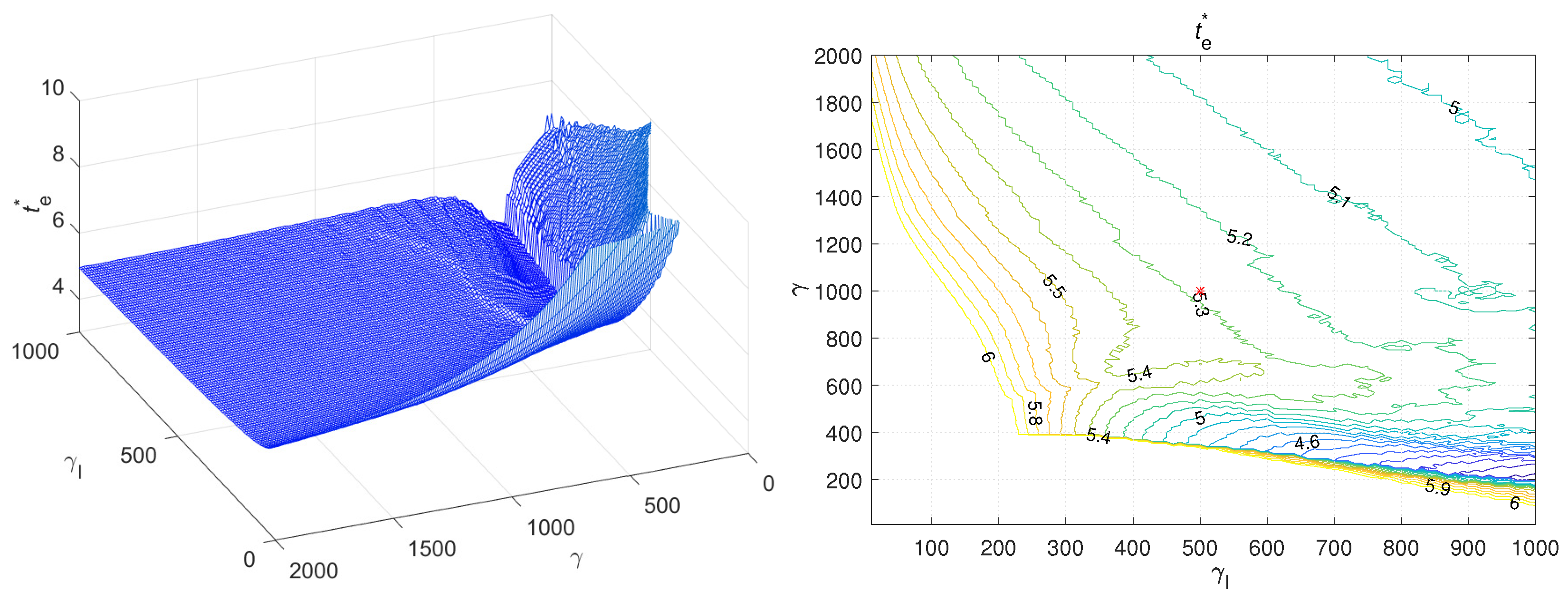
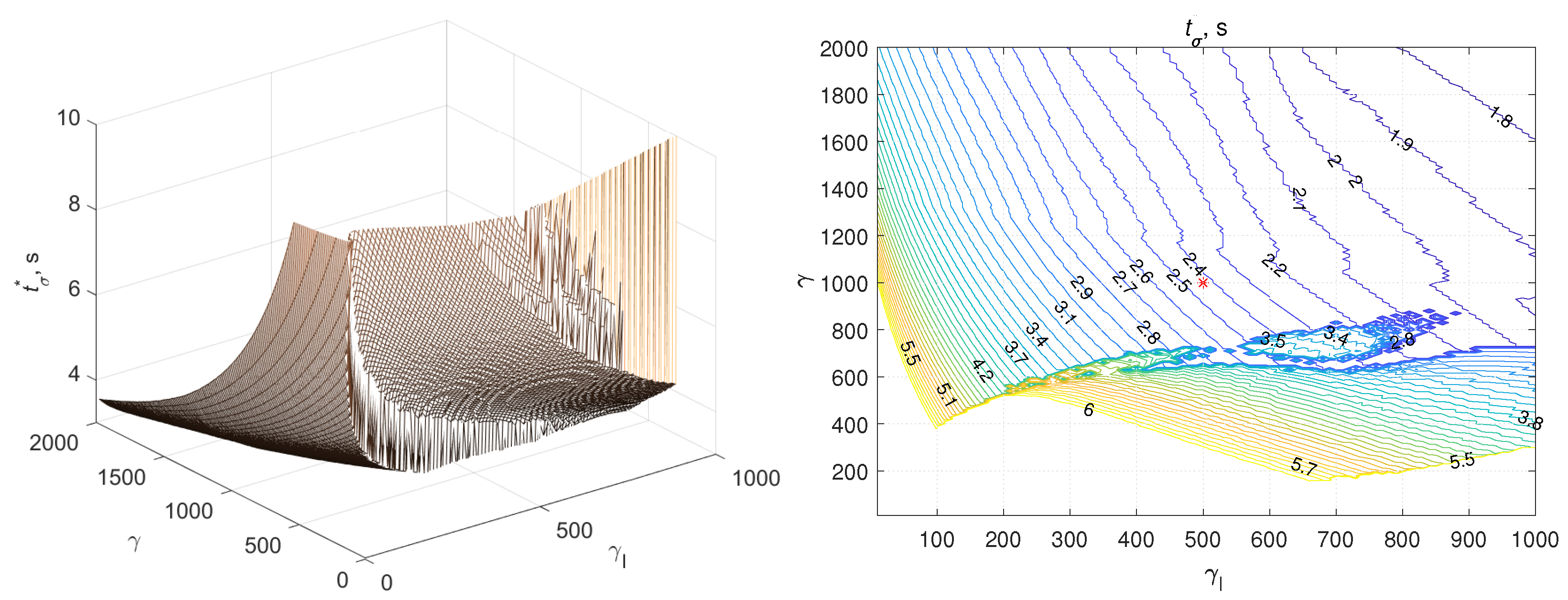
5.5.2. Robustness with Respect to Controller Parameters
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DoF | Degrees of Freedom |
| FC | Frequency Converter |
| FIR | Finite Impulse Response |
| IM | Induction Motor |
| IRM | Implicit Reference Model |
| LSE | Least-Square Estimation |
| MMLS | Multi-Resonance Mechatronic Laboratory Setup |
| MRAC | Model Reference Adaptive Control |
| PD | Proportional-Differential |
| SAC | Simple Adaptive Control |
| SG | Speed Gradient |
| SGA | Speed-Gradient Algorithm |
| pseudo-inverse to matrix |
References
- Blekhman, I.I. Vibrational Mechanics: Nonlinear Dynamic Effects, General Approach, Applications; World Scientific: Singapore, 2000. [Google Scholar] [CrossRef]
- Blekhman, I.I.; Vaisberg, L.A. Self-Synchronization as a Self-Organization Phenomenon and a Basis for Development of Energy-Efficient Technologies. In Proceedings of the 10th Biennial International Conference on Vibration Problems (ICOVP), Prague, Czech Republic, 5–8 September 2011; Segla, S., Tuma, J., Petrikova, I., Eds.; pp. 365–370. [Google Scholar]
- Panovko, G.Y.; Shokhin, A.E.; Eremeikin, S.A. Experimental Analysis of the Oscillations of a Mechanical System with Self-synchronized Inertial Vibration Exciters. J. Mach. Manuf. Reliab. 2015, 44, 492–496. [Google Scholar] [CrossRef]
- Gouskov, A.; Panovko, G.; Shokhin, A. To the issue of control resonant oscillations of a vibrating machine with two self-synchronizing inertial exciters. Lect. Notes Mech. Eng. 2021, 58, 515–526. [Google Scholar] [CrossRef]
- Lyan, I.; Panovko, G. Modelling the granular medium dynamics on rough vibrating plane using method of large particles. IOP Conf. Ser. Mater. Sci. Eng. 2019, 489, 012039. [Google Scholar] [CrossRef] [Green Version]
- Blekhman, I.I.; Vasil’kov, V.B.; Semenov, Y.A. Vibrotransporting of Bodies on a Surface with Non-Translational Rotational Oscillations. J. Mach. Manuf. Reliab. 2020, 49, 280–286. [Google Scholar] [CrossRef]
- Blekhman, L.I.; Kremer, E.B.; Vasilkov, V.B. Research on Vibration Processes and Devices: New Results and Applications. In Mechanics and Control of Solids and Structures; Polyansky, V.A., Belyaev, A.K., Eds.; Advanced Structured Materials; Springer Nature: Berlin/Heidelberg, Germany, 2022; Volume 164, Chapter 4; pp. 75–90. [Google Scholar] [CrossRef]
- Vasiliev, A.M.; Bredikhin, S.A.; Andreev, V.K. On the issue of vibration displacement with non-harmonic oscillations of the working surface [K voprosu o vibratsionnom peremeshchenii pri negarmonicheskikh kolebaniyakh rabochey poverkhnosti]. Sci. J. NRU ITMO. Ser. Process. Food Prod. 2019, 42–48. (In Russian) [Google Scholar] [CrossRef]
- Andrievsky, B.; Boikov, V. Bidirectional controlled multiple synchronization of unbalanced rotors and its experimental evaluation. Cybern. Phys. 2021, 10, 63–74. [Google Scholar] [CrossRef]
- Fradkov, A.L.; Tomchina, O.P.; Andrievsky, B.; Boikov, V.I. Control of Phase Shift in Two-Rotor Vibration Units. IEEE Trans. Contr. Syst. Technol. 2021, 29, 1316–1323. [Google Scholar] [CrossRef]
- Andrievsky, B.; Zaitceva, I.; Li, T.; Fradkov, A.L. Adaptive Multiple Synchronization and Phase Shift Control for Mechatronic Vibrational Setup. In Proceedings of the 2022 8th International Conference on Control, Decision and Information Technologies (CoDIT), Istanbul, Turkey, 17–20 May 2022; pp. 611–616. [Google Scholar] [CrossRef]
- Andrievsky, B.; Zaitceva, I. Symmetrical Control Law for Chaotization of Platform Vibrations. Symmetry 2022, 14, 2460. [Google Scholar] [CrossRef]
- Fradkov, A.L. Speed-gradient Scheme and its Applications in Adaptive Control. Autom. Remote Control 1979, 40, 1333–1342. [Google Scholar]
- Andrievskii, B.R.; Stotsky, A.A.; Fradkov, A.L. Velocity gradient algorithms in control and adaptation. Autom. Remote Control 1988, 49, 1533–1564. [Google Scholar]
- Fradkov, A.L.; Miroshnik, I.V.; Nikiforov, V.O. Nonlinear and Adaptive Control of Complex Systems; Kluwer: Dordrecht, The Netherlands, 1999. [Google Scholar] [CrossRef]
- Fradkov, A.L. Adaptive Control in Large-Scale Systems; Nauka: Moscow, Russia, 1990. (In Russian) [Google Scholar]
- Andrievsky, B.; Fradkov, A. Speed Gradient Method and Its Applications. Autom. Remote. Control 2021, 82, 1463–1518. [Google Scholar] [CrossRef]
- LaSalle, J.P. (Ed.) The Stability of Dynamical Systems; SIAM: Philadephia, PA, USA, 1976. [Google Scholar] [CrossRef]
- Arzstein, Z. The limiting equations of nonautonomous ordinary differential equations. J. Differ. Equ. 1977, 25, 184–202. [Google Scholar] [CrossRef] [Green Version]
- Barkana, I. Defending the Beauty of the Invariance Principle. Int. J. Control 2014, 87, 186–206. [Google Scholar] [CrossRef]
- Barkana, I. The New Theorem of Stability—Direct extension of Lyapunov Theorem. Math. Eng. Sci. Aeronaut. MESA 2015, 6, 519–535. [Google Scholar]
- Barkana, I. Barbalat’s Lemma and Stability—Misuse of a correct mathematical result? Math. Eng. Sci. Aeronaut. MESA 2016, 7, 197–218. [Google Scholar]
- Barkana, I. Revisiting limits, derivatives, and the apparent need for continuity for convergence of derivatives. Math. Eng. Sci. Aeronaut. MESA 2017, 8, 29–41. [Google Scholar]
- Barkana, I. Can stability analysis be really simplified? (From Lyapunov to the new theorem of stability—Revisiting Lyapunov, Barbalat, Lasalle and all that). Math. Eng. Sci. Aeronaut. MESA 2017, 8, 171–199. [Google Scholar]
- Barkana, I. Modification of Barbalat’s Lemma. Math. Eng. Sci. Aeronaut. MESA 2022, 13, 283–289. [Google Scholar]
- Barkana, I. Modifying and extending Cantor set for better understanding of the concept of limit. Math. Eng. Sci. Aeronaut. MESA 2022, 13, 821–831. [Google Scholar]
- Matrosov, V. On the stability of motion. J. Appl. Math. Mech. 1962, 26, 1337–1353. [Google Scholar] [CrossRef]
- Fradkov, A.L. Lyapunov–Bregman functions for speed-gradient adaptive control of nonlinear time-varying systems. IFAC-PapersOnLine 2022, 55, 544–548. [Google Scholar] [CrossRef]
- Stotsky, A.A. Combined adaptive and variable structure control. In Variable Structure and Lyapunov Control; Zinober, A., Ed.; Springer: London, UK; New York, NY, USA; Berlin/Heidelberg, Germany, 1994; pp. 313–333. [Google Scholar]
- Levant, A. Sliding order and sliding accuracy in sliding mode control. Int. J. Control 1993, 58, 1247–1263. [Google Scholar] [CrossRef]
- Shtessel, Y.; Edwards, C.; Fridman, L.; Levant, A. Sliding Mode Control and Observation; Control Engineering; Birkhäuser: New York, NY, USA, 2014. [Google Scholar] [CrossRef]
- Orlov, Y. Finite Time Stability and Robust Control Synthesis of Uncertain Switched Systems. SIAM J. Control Optim. 2004, 43, 1253–1271. [Google Scholar] [CrossRef]
- Massey, T.; Shtessel, Y. Continuous traditional and high-order sliding modes for satellite formation control. J. Guid. Control Dyn. 2005, 28, 826–831. [Google Scholar] [CrossRef]
- Levant, A. Homogeneous High-Order Sliding Modes. IFAC Proc. Vol. 2009, 42, 210–215. [Google Scholar] [CrossRef] [Green Version]
- Bartolini, G.; Levant, A.; Pisano, A.; Usai, E. Adaptive second-order sliding mode control with uncertainty compensation. Intern. J. Control 2016, 89, 1747–1758. [Google Scholar] [CrossRef]
- Velázquez-Velázquez, J.E.; Galván-Guerra, R.; Fridman, L.; Iriarte, R. On Robustification Based on Continuous Integral Sliding Modes. In Complex Systems: Spanning Control and Computational Cybernetics: Applications: Dedicated to Professor Georgi M. Dimirovski on His Anniversary; Shi, P., Stefanovski, J., Kacprzyk, J., Eds.; Springer International Publishing: Cham, Switzerland, 2022; pp. 199–231. [Google Scholar] [CrossRef]
- Andrievsky, B.; Fradkov, A. Implicit model reference adaptive controller based on feedback Kalman–Yakubovich lemma. In Proceedings of the IEEE Conference on Control Applications (CCA’94), Glasgow, UK, 24–26 August 1994; Volume 2, pp. 1171–1174. [Google Scholar] [CrossRef]
- Andrievskii, B.R.; Blekhman, I.I.; Blekhman, L.I.; Boikov, V.I.; Vasil’kov, V.B.; Fradkov, A.L. Education and Research Mechatronic Complex for Studying Vibration Devices and Processes. J. Mach. Manuf. Reliab. 2016, 45, 369–374. [Google Scholar] [CrossRef]
- Tomchin, D.A.; Fradkov, A.L. Control of passage through a resonance area during the start of a two-rotor vibration machine. J. Mach. Manuf. Reliab. 2007, 36, 380–385. [Google Scholar] [CrossRef]
- Bennett, M.; Schatz, M.F.; Rockwood, H.; Wiesenfeld, K. Huygens’s clocks. Proc. R. Soc. A 2002, 458. [Google Scholar] [CrossRef]
- Blekhman, I.I.; Fradkov, A.L.; Nijmeijer, H.; Pogromsky, A.Y. On self-synchronization and controlled synchronization of dynamical systems. Syst. Control Lett. 1997, 31, 299–306. [Google Scholar] [CrossRef] [Green Version]
- Blekhman, I.I.; Fradkov, A.L.; Tomchina, O.P.; Bogdanov, D.E. Self-Synchronization and Controlled Synchronization: General Definition and Example Design. Math. Comput. Simul. 2002, 58, 367–384. [Google Scholar] [CrossRef]
- Blekhman, I.I.; Yaroshevich, N.P. Extension of the domain of applicability of the integral stability criterion (extremum property) in synchronization problems. J. Appl. Math. Mech. 2004, 68, 839–846. [Google Scholar] [CrossRef]
- Smirnova, V.B.; Proskurnikov, A.V. Self-synchronization of unbalanced rotors and the swing equation. IFAC-PapersOnLine 2021, 54, 71–76. [Google Scholar] [CrossRef]
- Smirnova, V.B.; Proskurnikov, A.V.; Utina, N.V. The development of Lyapunov direct method in application to synchronization systems. J. Phys. Conf. Ser. 2021, 1864, 012065. [Google Scholar] [CrossRef]
- Yakubovich, V.A.; Leonov, G.A.; Gelig, A.K. Stability of Stationary Sets in Control Systems with Discontinuous Nonlinearities; Stability, Vibration and Control of Systems, Series A; World Scientific: Singapore, 2004; Volume 14. [Google Scholar]
- Leonov, G.A.; Kuznetsov, N.V. Hidden attractors in dynamical systems. From hidden oscillations in Hilbert-Kolmogorov, Aizerman, and Kalman problems to hidden chaotic attractors in Chua circuits. Int. J. Bifurc. Chaos 2013, 23, 1330002. [Google Scholar] [CrossRef] [Green Version]
- Kuznetsov, N. Theory of hidden oscillations and stability of control systems. J. Comput. Syst. Sci. Int. 2020, 59, 647–668. [Google Scholar] [CrossRef]
- Fradkov, A.; Tomchina, O.; Tomchin, D. Controlled passage through resonance in mechanical systems. J. Sound Vib. 2011, 330, 1065–1073. [Google Scholar] [CrossRef]
- Khalil, H.K.; Strangas, E.G.; Jurkovic, S. Speed Observer and Reduced Nonlinear Model for Sensorless Control of Induction Motors. IEEE Trans. Contr. Syst. Technol. 2009, 17, 327–339. [Google Scholar] [CrossRef]
- Joshi, B.; Chandorkar, M. Two-motor single-inverter field-oriented induction machine drive dynamic performance. Sadhana 2014, 39, 391–407. [Google Scholar] [CrossRef] [Green Version]
- Giri, F. (Ed.) AC Electric Motors Control: Advanced Design Techniques and Applications; John Wiley & Sons, Ltd.: Chichester, UK, 2013. [Google Scholar]
- Ljung, L. System Identification: Theory for the User, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1999. [Google Scholar]
- Lion, P.M. Rapid identification of linear and nonlinear systems. AIAA J 1967, 5, 1835–1842. [Google Scholar] [CrossRef]
- Gawthrop, P.J. Continuous-Time Self-Tuning Control; Research Studies Press: Letchworth, UK, 1987. [Google Scholar]
- Landau, J.D. Adaptive Control Systems. The Model Reference Approach; Dekker: New York, NY, USA; Basel, Switzerland, 1979. [Google Scholar]
- Cuomo, K.M.; Oppenheim, A.V.; Strogatz, S.H. Synchronization of Lorenz-based chaotic circuits with applications to communications. IEEE Trans. Circuits Syst. II 1993, 40, 626–633. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Li, C.; Lei, T.; Liu, Z.; Tao, C. A symmetric controllable hyperchaotic hidden attractor. Symmetry 2020, 12, 550. [Google Scholar] [CrossRef] [Green Version]
- Li, C.; Sun, J.; Lu, T.; Lei, T. Symmetry evolution in chaotic system. Symmetry 2020, 12, 574. [Google Scholar] [CrossRef] [Green Version]
- Mahmoud, E.; Higazy, M.; Althagafi, O. A novel strategy for complete and phase robust synchronizations of chaotic nonlinear systems. Symmetry 2020, 12, 11765. [Google Scholar] [CrossRef]
- Zhong, X.; Wang, S. Learning Coupled Oscillators System with Reservoir Computing. Symmetry 2022, 14, 1084. [Google Scholar] [CrossRef]
- Bucolo, M.; Caponetto, R.; Fortuna, L.; Frasca, M.; Rizzo, A. Does chaos work better than noise? IEEE Circuits Syst. Mag. 2002, 2, 4–19. [Google Scholar] [CrossRef]
- Tomchina, O.P. Vibration field control of a two-rotor vibratory unit in the double synchronization mode. Cybern. Phys. 2022, 11, 246–252. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # | Content | Comment |
|---|---|---|
| 1 | Simplification of stability analysis for eliminating certain continuity conditions | Section 2.1, Theorem 1 |
| 2 | Relay phase-shift control law with IRM | Equations (39)–(41) |
| 3 | Sine-modification of phase-shift controller | Equation (49) |
| 4 | Algorithm for parameteric identification of drive systems | Section 3.3 |
| 5 | Analysis of the limiting possibilities of feedback synchronization control for two-rotor vibrating machines | Section 5.4 |
| 6 | Robustness analysis of relay phase-shift control | Section 5.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Andrievsky, B.; Zaitceva, I.; Barkana, I. Passification-Based Robust Phase-Shift Control for Two-Rotor Vibration Machine. Electronics 2023, 12, 1006. https://doi.org/10.3390/electronics12041006
Andrievsky B, Zaitceva I, Barkana I. Passification-Based Robust Phase-Shift Control for Two-Rotor Vibration Machine. Electronics. 2023; 12(4):1006. https://doi.org/10.3390/electronics12041006
Chicago/Turabian StyleAndrievsky, Boris, Iuliia Zaitceva, and Itzhak Barkana. 2023. "Passification-Based Robust Phase-Shift Control for Two-Rotor Vibration Machine" Electronics 12, no. 4: 1006. https://doi.org/10.3390/electronics12041006