
Data Glove with Bending Sensor and Inertial Sensor Based on Weighted DTW Fusion for Sign Language Recognition

Abstract
:1. Introduction
2. Application Model and Sign Languages Datasets
2.1. Application Model
2.2. Sign Languages Datasets
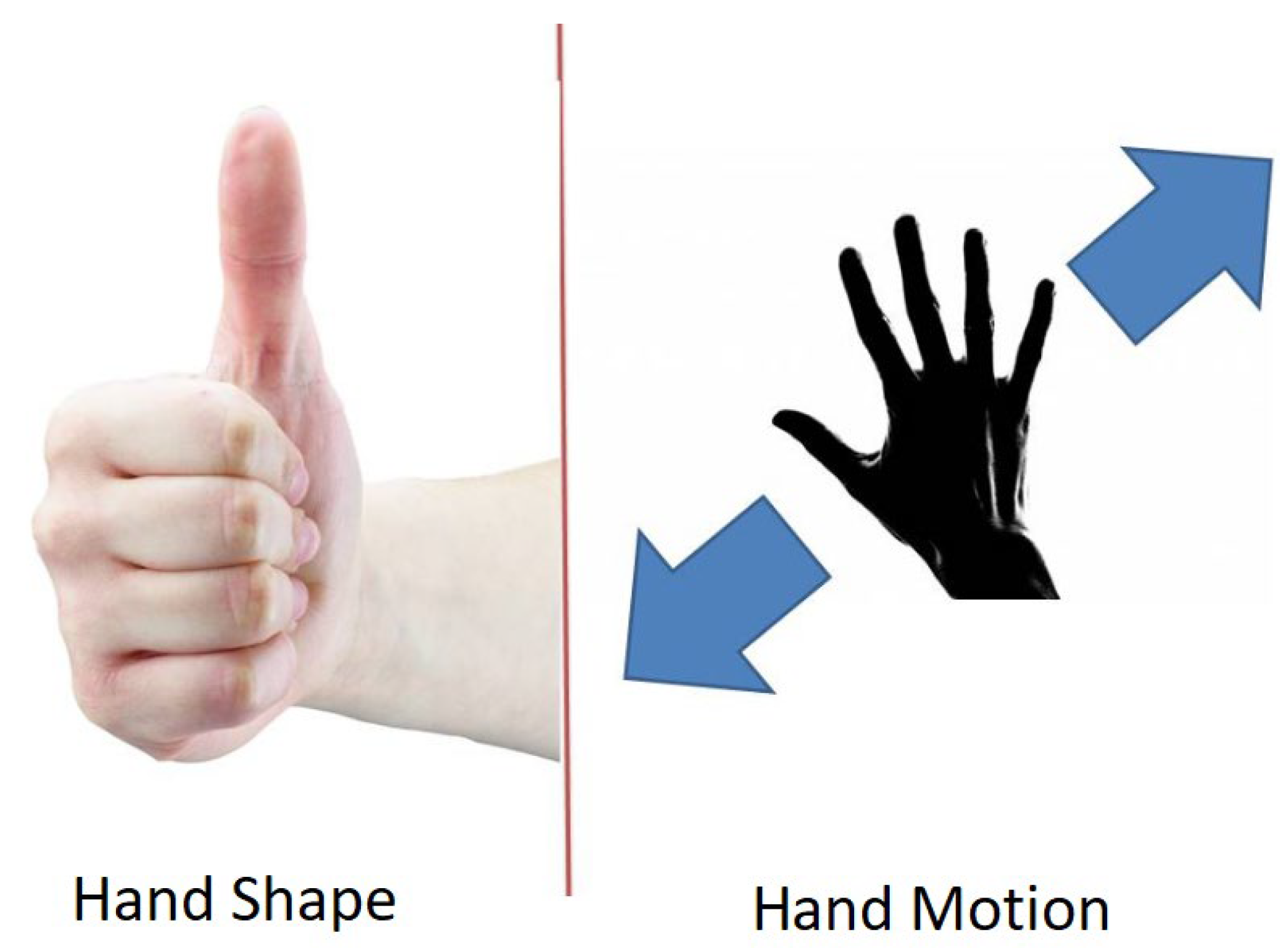
2.2.1. Characteristics of Sign Language Data
2.2.2. Sign Language Dataset Definition
3. Methods
3.1. System Design
3.2. Implementation
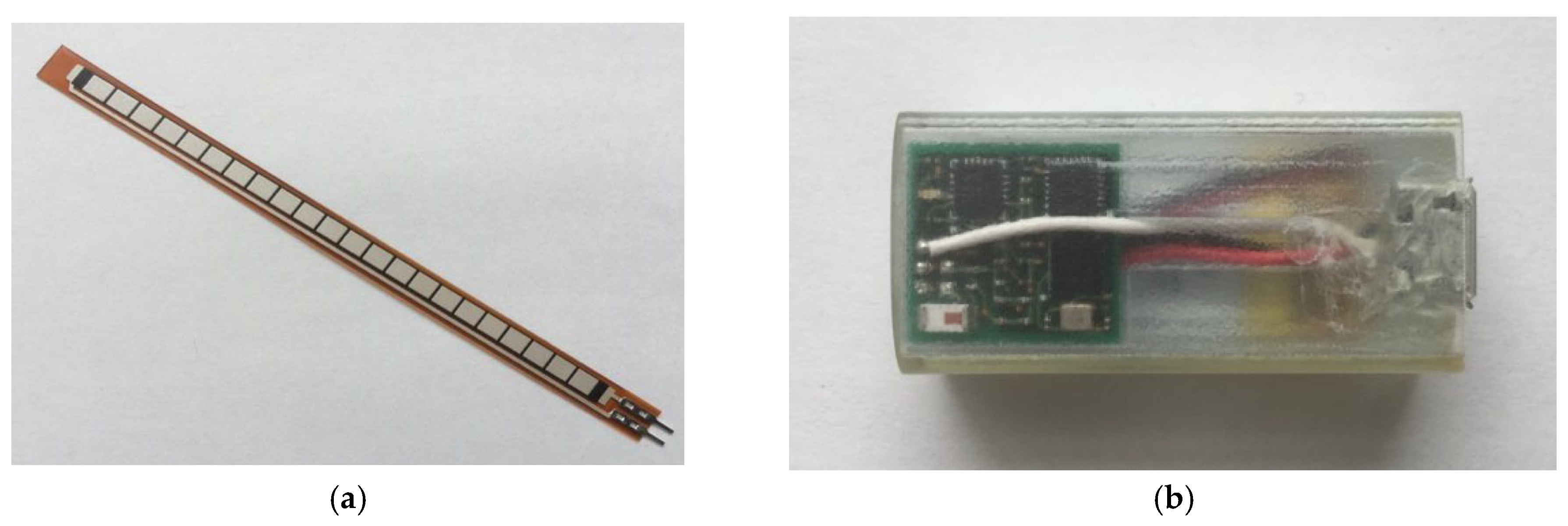
3.2.1. Hardware
3.2.2. Software
3.2.3. User Interface
3.2.4. Data Format
3.3. Recognition Method
3.3.1. Dynamic Time Warping
- To calculate the similarity of a sequence and sequence , make similarity arrays of size .
- Assign 0 to and to the others.
- Calculate the similarity of two time-series data, , with calculation (3) for and . is the cost function.
- The DTW distance we need is the result of calculation in all combinations .
3.3.2. Weighted DTW
- Combine 10 bending sensors added weight of 10 fingers.
- Combine 2 WonderSense added weight of both hands.
- Combine (1) data and (2) data added weight .
4. Experiment and Evaluation
4.1. Experimental Setting
Usage of the Sign-Glove
4.2. Experiment Results
4.2.1. Comparison between the Hand Shape, Hand Motion, and Combination Methods
4.2.2. Comparison between Using Our Proposed Weighted DTW or Not
5. Discussion
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ministry of Health. Labour and Welfare Home Page, ”2016 Survey on Difficulty in Life (Nationwide Fact-Finding Survey on Children with Disabilities at Home) Results”. Available online: https://www.mhlw.go.jp/toukei/list/dl/seikatsu_chousa_c_h28.pdf (accessed on 20 January 2023).
- Rastgoo, R.; Kiani, K.; Escalera, S. Sign Language Recognition: A Deep Survey. Expert Syst. Appl. 2021, 164, 113794. [Google Scholar] [CrossRef]
- Amin, M.S.; Rizvi, S.T.; Hossain, M.M. A Comparative Review on Applications of Different Sensors for Sign Language Recognition. J. Imaging 2022, 8, 98. [Google Scholar] [CrossRef] [PubMed]
- Jiang, S.; Kang, P.; Song, X.; Lo, B.P.; Shull, P.B. Emerging Wearable Interfaces and Algorithms for Hand Gesture Recognition: A Survey. IEEE Rev. Biomed. Eng. 2021, 15, 85–102. [Google Scholar] [CrossRef] [PubMed]
- Seçkin, A.Ç. Multi-Sensor Glove Design and Bio-Signal Data Collection. Nat. Appl. Sci. J. Full Pap. 2nd Int. Congr. Updates Biomed. Eng. 2021, 3, 87–93. [Google Scholar]
- Seçkin, M.; Seçkin, A.Ç.; Gençer, Ç. Biomedical Sensors and Applications of Wearable Technologies on Arm and Hand. Biomed. Mater. Devices 2022, 1, 1–13. [Google Scholar] [CrossRef]
- Aloysius, N.; Geetha, M.K. Understanding vision-based continuous sign language recognition. Multimed. Tools Appl. 2020, 79, 22177–22209. [Google Scholar] [CrossRef]
- Sharma, S.; Singh, S. Vision-Based Sign Language Recognition System: A Comprehensive Review. In Proceedings of the 2020 International Conference on Inventive Computation Technologies (ICICT), Coimbatore, India, 26–28 February 2020; pp. 140–144. [Google Scholar]
- Ma, Y.; Zhou, G.; Wang, S.; Zhao, H.; Jung, W. SignFi: Sign Language Recognition Using WiFi. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2018, 2, 23:1–23:21. [Google Scholar] [CrossRef]
- He, W.; Wu, K.; Zou, Y.; Ming, Z. WiG: WiFi-Based Gesture Recognition System. In Proceedings of the 2015 24th International Conference on Computer Communication and Networks (ICCCN), Las Vegas, NV, USA, 3–6 August 2015; pp. 1–7. [Google Scholar]
- Kudrinko, K.; Flavin, E.; Zhu, X.; Li, Q. Wearable Sensor-Based Sign Language Recognition: A Comprehensive Review. IEEE Rev. Biomed. Eng. 2020, 14, 82–97. [Google Scholar] [CrossRef] [PubMed]
- Lokhande, P.M.; Prajapati, R.; Pansare, S. Data Gloves for Sign Language Recognition System. Int. J. Comput. Appl. 2015, 975, 8887. [Google Scholar]
- Samaan, G.H.; Wadie, A.R.; Attia, A.K.; Asaad, A.M.; Kamel, A.E.; Slim, S.O.; Abdallah, M.S.; Cho, Y. MediaPipe’s Landmarks with RNN for Dynamic Sign Language Recognition. Electronics 2022, 11, 3228. [Google Scholar] [CrossRef]
- Kohei, M.; Youngha, C.; Nobuhiko, M. Recognition of Fingerspelling in Japanese Sign Language based on Nail Detection and Wrist Position; ITE Technical Report; ITE: Singapore, 2013; pp. 199–202. [Google Scholar]
- Shibata, H.; Hiromitsu, N.; Hiroshi, T.; Daisuke, K. Similarity Analysis of Motion Difference for Sign Language Recognition using Colored Gloves. Forum Inf. Technol. 2015, 14, 551–554. [Google Scholar]
- Salagar, M.; Kulkarni, P.; Gondane, S. Implementation of Dynamic Time Warping for Gesture Recognition in Sign Language Using High Performance Computing. In Proceedings of the 2013 International Conference on Human Computer Interactions (ICHCI), Chennai, India, 23–24 August 2013; pp. 1–6. [Google Scholar]
- Korzeniewska, E.; Kania, M.; Zawislak, R. Textronic Glove Translating Polish Sign Language. Sensors 2022, 22, 6788. [Google Scholar] [CrossRef] [PubMed]
- Na, Y.; Yang, H.; Woo, J. Classification of the Korean Sign Language Alphabet Using an Accelerometer with a Support Vector Machine. J. Sensors 2021, 2021, 9304925:1–9304925:10. [Google Scholar] [CrossRef]
- Tateno, S.; Liu, H.; Ou, J. Development of Sign Language Motion Recognition System for Hearing-Impaired People Using Electromyography Signal. Sensors 2020, 20, 5807. [Google Scholar] [CrossRef] [PubMed]
- Khomami, S.A.; Shamekhi, S. Persian sign language recognition using IMU and surface EMG sensors. Measurement 2021, 168, 108471. [Google Scholar] [CrossRef]
- Abhishek, K.S.; Qubeley, L.C.F.; Ho, D. Gloved-Based Hand Gesture Recognition Sign Language Translator Using Capacitive touch sensor. In Proceedings of the IEEE International Conference on Elrctron Devices and Solid-State Circuits (EDSSC), Hong Kong, China, 3–5 August 2016; pp. 334–337. [Google Scholar]
- Gałka, J.; Masior, M.; Zaborski, M.; Barczewska, K. Inertial Motion Sensing Glove for Sign Language Gesture Acquisition and Recognition. IEEE Sens. J. 2016, 16, 6310–6316. [Google Scholar] [CrossRef]
- Faisal, M.A.; Abir, F.F.; Ahmed, M.U. Sensor Dataglove for Real-Time Static and Dynamic Hand Gesture Recognition. In Proceedings of the 2021 Joint 10th International Conference on Informatics, Electronics & Vision (ICIEV) and 2021 5th International Conference on Imaging, Vision & Pattern Recognition (icIVPR), Kitakyushu Virtual, Japan, 16–20 August 2021; pp. 1–7. [Google Scholar]
- Faisal, M.A.; Abir, F.F.; Ahmed, M.U.; Ahad, M. Exploiting domain transformation and deep learning for hand gesture recognition using a low-cost dataglove. Sci. Rep. 2022, 12, 21446. [Google Scholar] [CrossRef] [PubMed]
- Lee, B.; Lee, S.M. Smart Wearable Hand Device for Sign Language Interpretation System with Sensors Fusion. IEEE Sens. J. 2018, 18, 1224–1232. [Google Scholar] [CrossRef]
- Chu, X.; Liu, J.; Shimamoto, S. A Sensor-Based Hand Gesture Recognition System for Japanese Sign Language. In Proceedings of the 2021 IEEE 3rd Global Conference on Life Sciences and Technologies (LifeTech), Nara, Japan, 9–11 March 2021; pp. 311–312. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Research | Sensor | Accuracy | Subject | Kinds | Portability | Algorithm | Dynamic Motion |
|---|---|---|---|---|---|---|---|
| Muaaz et al. [16] | Kinect | 95.6% | 5 | 10 | ○ | DTW | ○ |
| Tateno et al. [19] | EMG | 97.7% | 20 | 20 | × | LSTM | ○ |
| Lee et al. [21] | Touch | 92% | - | 36 | ○ | Tree | × |
| Faisal et al. [23] | Inertial and Flex | 64% | 35 | 3 | ○ | KNN | ○ |
| Chu et al. [26] | Inertial and FlexForce | 82.5% | 3 | 7 | ○ | DTW | ○ |
| Ours | Inertial and Flex | 85.21% | 8 | 20 | ○ | weighted DTW | ○ |
| Weight | Value | Weight | Value |
|---|---|---|---|
| 0.05 | 0.0002 | ||
| 0.2448 | 0.0002 | ||
| 0.3772 | 0.0002 | ||
| 0.3776 | 0.0002 | ||
| 0.0002 | 0.0002 | ||
| 0.0002 | 0.5 |
| Research (Years) | Subject | Number of Signs | Algorithm | Sensor | Cross-Recognition |
|---|---|---|---|---|---|
| This study | 8 | 20 | Weighted DTW | Bend and IMU | 85.21% |
| Chu et al. [26] (2021) | 3 | 7 | DTW | Bend and IMU | 82.5% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, C.; Amino, S.; Jing, L. Data Glove with Bending Sensor and Inertial Sensor Based on Weighted DTW Fusion for Sign Language Recognition. Electronics 2023, 12, 613. https://doi.org/10.3390/electronics12030613
Lu C, Amino S, Jing L. Data Glove with Bending Sensor and Inertial Sensor Based on Weighted DTW Fusion for Sign Language Recognition. Electronics. 2023; 12(3):613. https://doi.org/10.3390/electronics12030613
Chicago/Turabian StyleLu, Chenghong, Shingo Amino, and Lei Jing. 2023. "Data Glove with Bending Sensor and Inertial Sensor Based on Weighted DTW Fusion for Sign Language Recognition" Electronics 12, no. 3: 613. https://doi.org/10.3390/electronics12030613