1. Introduction
Many studies on cooperative intelligent transportation systems (C-ITS) for actively responding to traffic conditions through a real-time mutual communication with surrounding vehicles and infrastructure while vehicles are moving have been widely discussed. The IEEE 802.11p/Wireless Access in Vehicular Environments (WAVE) standard was developed to support vehicle wireless (i.e., vehicle-to-everything (V2X)) communication, in which the MAC and PHY of WLAN were defined [
1]. Note that IEEE 802.11p is a modification of the frequency bandwidth of the IEEE 802.11a standard from 20 MHz to 10 MHz [
1]. This means that channel estimation (CE) in IEEE 802.11p V2X communication systems can be a difficult task, usually due to the high mobility and insufficient number of pilots in orthogonal frequency division multiplexing (OFDM) systems [
1,
2,
3,
4,
5,
6,
7,
8,
9,
10,
11,
12].
Since the minimum mean square error (MMSE)-CE scheme for OFDM systems shows excellent channel estimation performance, extensive research related to this has been conducted [
2,
3,
4,
5,
6,
7,
8]. There are two kinds of MMSE scheme: one is the pilot symbol assisted scheme requiring pilot or training symbols [
2,
3,
4,
5,
6] and the other is the decision-directed scheme utilizing the constructed data pilots [
7,
8]. In [
2], the maximum likelihood (ML) and the MMSE schemes were compared as the channel estimators based on pilot-aided OFDM systems. The author in [
3] investigated pilot-symbol-aided parameter estimation for OFDM systems. The work in [
4] dealt MMSE-CE based on power delay profile approximation. In [
5], low-complexity windowed discrete Fourier transform (DFT)-based MMSE channel estimators were proposed and analyzed. An adaptive MMSE-CE was addressed in [
6] related to maximum access delay time estimation. Notice that the works of [
2,
3,
4,
5,
6] cannot guarantee a good CE performance for OFDM systems with insufficient pilot or training symbols.
Correspondingly, various improved channel estimation technologies for IEEE 802.11p systems have been developed in order to solve the problem of insufficient pilot symbols in OFDM systems and so as to accurately estimate time-varying channels [
7,
8,
9,
10,
11,
12]. For example, spectral temporal averaging (STA), construct data pilot (CDP) [
9], time–domain reliable-test frequency–domain interpolation (TRFI) [
10], weighted sum using update matrix (WSUM) [
11], and MMSE channel estimation schemes have been proposed [
7,
8]. The authors in [
12] presented a state feedback decision algorithm for data pilot-aided channel estimation in the iterative channel estimation and decoding methods. As shown in [
11], a WSUM scheme can be regarded as a weighted averaging scheme in a frequency domain when it is compared with a STA scheme. The authors in [
8] presented an adaptive mode-switching method between channel estimation schemes based on the MMSE technique. The MMSE channel estimation schemes in [
7,
8] have structures in which a correlation matrix is obtained by accumulating each OFDM symbol in a packet, and a matrix inversion related to the updated correlation matrix is performed for every OFDM symbol in a packet. Despite the high complexity of the MMSE schemes in [
7,
8], they do not provide satisfactory performances in a higher speed and more frequency selective channel environment. This is caused by the fact that it is insufficient to estimate the correlation matrix of a channel using only OFDM symbols in one packet.
The works in [
4,
13,
14] dealt with the delay spread estimation based on training symbols and the SNR estimation based on the preamble or pilot symbols for OFDM systems. Recently, the non-data-aided (NDA) method for noise variance estimation was proposed in [
15]. Notice that the works in [
4,
13,
14] cannot be used to estimate the power delay profile (PDP) for the case of having insufficient pilot or training symbols. Moreover, the works in [
2,
5,
7,
8] did not address the PDP estimation issue, which can be applied at the MMSE channel estimation for OFDM systems. The work in [
4] presented the approximated PDP estimation method based on pilot symbols and the MMSE channel estimation scheme for OFDM systems. The authors in [
16] presented the PDP estimation methods based on pilot symbols for multiple-input multiple-output (MIMO)-OFDM systems. Nevertheless, the methods in [
4,
6,
16] cannot be applied to the case of having insufficient pilot or training symbols.
In this paper, we employ a technique for obtaining the correlation matrix of channels that are not related to the instantaneous channel estimation for OFDM symbols in a packet. By doing so, the inverse matrix operation in the MMSE scheme can be performed only once per packet. The authors in [
17] presented the noise variance and PDP estimators for OFDM systems by taking advantage of the periodic redundancy induced by the CP. The authors in [
18] showed the NDA signal-to-noise ratio (SNR) estimation of the OFDM signals transmitted through unknown multipath fading channel without a subjective choice of a threshold level [
17]. Recently, the authors in [
19] proposed an improved PDP estimation scheme as an approximated ML-type method. In order to apply for MMSE channel estimation, three types of PDP estimators are considered as follows:
‘Method 1’: reference [
17] (with a threshold level)
‘Method 2’: reference [
18] & Modification (without a threshold level)
‘Method 3’: reference [
19] (without a threshold level)
Notice that ‘Modification’ in ‘Method 2’ relate to reducing the amount of computation required for PDP estimation. The performance of the MMSE channel estimation scheme to which the three types of PDP estimators are applied is verified through the simulation on IEEE 802.11p/WAVE systems. For error rate performance comparison, we present three performance bounds of ‘Perfect CE’, ‘’, and ‘’, which show the limit of the time-varying channel, the practical channel where a path correlation exists, and the limit in the case where there is no path correlation in the practical channel, respectively. Through simulations considering the correlated channel matrix, it is confirmed that the performance limitations and superiority of the proposed methods are verified.
The remainder of this paper is organized as follows.
Section 2 describes the discrete signal model for OFDM systems.
Section 3 presents three types of PDP estimation scheme. The PDP based MMSE channel estimation schemes are described in
Section 4.
Section 5 shows the simulation results, and concluding remarks are given in
Section 6.
2. Discrete Signal Model for OFDM Systems
In OFDM systems, source data are grouped and mapped into
N modulated symbols
, where
, and
denotes the expectation. Then, by inverse discrete Fourier transform (IDFT) on
N parallel subcarriers, the transmitted time–domain signal of the
nth sample for the
mth OFDM symbol can be written as
where
, and
is the signal power [
20,
21,
22].
The guard interval is inserted to prevent interference between OFDM symbols and includes a cyclic prefix (CP) that replicates the end of the IDFT output sample. When
Ng is the number of guard interval samples, it is assumed to be larger than the delay spread of the multipath fading channel. The signal is transmitted over the multipath fading channel, and its low-pass channel impulse response can be expressed as
where
,
,
,
, and
L are the time, the delay, a Dirac delta function, the propagation delay of the
lth path, and the number of multipaths, respectively [
20,
21,
22]. The correlation relationship between the paths can be expressed by the wide-sense stationary uncorrelated scattering (WSSUS) model [
21,
22,
23]. This model assumes that the paths are uncorrelated, and the correlation property of the channel is stationary.
When we remove CP samples, the received signal can be presented as
where
represents a cyclic shift in the base of
N,
, which is an Additive White Gaussian Noise (AWGN),
is the
lth path channel gain of the
nth sample for the
mth OFDM symbol, and
is the delay normalized by the sampling time
[
22]. For simplicity, we round
to an integer without considering leakage. However, the correlation approach in this paper may also be extended to fractional
[
17].
When we assume the perfect synchronization with
, and that the channel is time-invariant within two consecutive OFDM symbols, indexes
m and
in
from (3) can be omitted as
. At the border between two OFDM symbols, the received signal samples for
can be expressed as
where
,
, and
is the unit step function [
17]. When we define the maximum number of paths including zero channel gain path as
the maximum access delay time, normalized by
, can be written as
The correlation between each received signal over CP duration and its corresponding sample at the end of the OFDM symbol can thus be expressed as [
17,
24]
where
. Note that the expectation in (7) is taken with regard to both
and
. When
L is large,
can be approximated as the complex Gaussian by using the central limited theorem, and the probability density function (PDF) can be presented as [
17,
24]
Samples
and
are jointly Gaussian with the PDF of
where
Notice that
and
(i.e.,
is a non-increasing value in proportion to
).
4. PDP Based MMSE Channel Estimation
Let us define the channel correlation matrix in the time-domain as
where
denotes the Hermitian transpose, and
is the
channel column vector of
where the non-zero
L elements of
in (4) are located at
at
, and
denotes the transpose. Therefore, the channel correlation matrix can be obtained in the frequency-domain as
where
is the
DFT matrix, and
denotes the operation that expands input
to a
matrix through zero-padding. The channel PDP is written as
where the non-zero
L path powers of
are allocated at
as
, and
obtains the diagonal elements of a matrix.
Note that, without considering fractional
,
is a diagonal matrix and
where
creates a
diagonal matrix. On the contrary, for the fractional
case,
cannot be a diagonal matrix and
. We describe this as related to the fractional
, in
Section 5.
From (17), (22), and
in
Table 2, the estimated channel PDP can be expressed as
From (25), (27), and (29), the estimated channel correlation matrices can be presented, in the time-domain and in the frequency-domain, as
and
Then, we obtain the MMSE weight matrix as
where
, and
denotes the
identity matrix. Then, the MMSE channel estimation coefficient can be expressed as
where
is the initially estimated channel gain. In general, the pilot-symbol-assisted channel estimation scheme has
. In this paper, we assume that
, as in [
7].
5. Simulation Results
In this paper, we demonstrate the efficiency of the proposed channel estimation schemes through simulations based on the IEEE 802.11p standard [
1,
25]. The key parameters in IEEE 802.11p are shown in
Table 3. The transmitter and the receiver basically adopt the convolutional encoder and the Viterbi decoder with constraint length 7, respectively [
1,
25]. We assume that one packet consists of 100 OFDM symbols, and the received signal is stored in the buffer in packet units. When the buffer size is
,
from (29) is estimated using the current received packet and the past
packets, and the total number of OFDM symbols used in the estimation process is
. We adopt QPSK with coding rate of 1/2. For all cases, the packet error rate (PER) performance is averaged over
packet transmissions with
.
For our simulations, we have employed the ‘CohdaWireless V2V channel model’ in [
26]. Among the five scenarios presented in [
26], we considered both ‘Street Crossing NLOS with 126 km/h’ and ‘Highway NLOS with 252km/h’, of which the channel profiles are presented in
Table 4. The other parameters, such as the Doppler spectrum, for each channel tap are listed in [
26]. In our simulation, we employ the fractional
by considering
in
Table 3 so that ‘Street Crossing NLOS’ has
and
, and ‘Highway NLOS’ has
, as shown in
Table 4. For the fractional case, the given path power is divided into two according to the relative distance to two adjacent sampling time locations [
27].
Figure 3a and
Figure 4b show both
and
of ‘Street Crossing NLOS’ and ‘Highway NLOS’, respectively. Note that
is not a diagonal matrix, and
from (28).
Figure 4 and
Figure 5 show
and
of ‘Street Crossing NLOS’, respectively, in which
is given by
In addition,
Figure 6 and
Figure 7 show
and
of ‘Highway NLOS’, respectively. In the four figures, the values are shown for data and pilot subcarriers, except for null and DC subcarriers, among a total of
components. From
Figure 3 to
Figure 7, it can be said that the proposed estimation method,
from (31), estimates
from (34) as shown in
Figure 5 and
Figure 7 for the practical channel
as shown in
Figure 4 and
Figure 6.
5.1. Simulation Results for PDP Estimators
From here, let us compare the performance of the three methods in
Section 3. When the NMSE of
in (11) is defined as
,
Figure 1 and
Figure 2 show it for ‘Street Crossing NLOS’ and ‘Highway NLOS’, respectively. From both figures, it can be seen that there is a different trend depending on the region to which
belongs. For
, the NMSE of
increases with SNR because of the residual interference (i.e., inter-symbol interference (ISI)). Note that
results in the smallest NMSE. For
, the NMSE of
is slightly increased compared to the optimal performance of
, but it is maintained according to the SNR. Moreover, even for
, it can be seen that the NMSE slightly increases at a high SNR, which is due to the time-varying effect of the channel. As shown in
Table 4, the velocity in ‘Highway NLOS’ is greater than that in ‘Street Crossing NLOS’. Therefore, we can observe from
Figure 1 and
Figure 2 that the time-varying effect of a channel is larger in ‘Highway NLOS’ than in ‘Street Crossing NLOS’.
For
, we define the correct detection (CD), the erroneous detection (ED), the bad detection (BD), and the good detection (GD) probabilities, respectively, as
In order to compare the three methods of
Section 3, as shown in
Figure 8 and
Figure 9, we show
,
,
, and
, for ‘Street Crossing NLOS’ and ‘Highway NLOS’ with regard to different values of
M and α. When the NMSE of
is defined as
,
Figure 1 and
Figure 10 show the NMSE of
for ‘Street Crossing NLOS’ and ‘Highway NLOS’, respectively. From
Figure 8,
Figure 9,
Figure 10 and
Figure 11, it can be seen that the performance of the PDP estimator improves as
M increases.
In the high SNR region in
Figure 8a, ‘Method 1’ has a higher CD probability than other methods but a non-zero ED probability, resulting in a low GD probability. Note that a non-zero ED probability means the case of
(i.e., residual interference) at
Figure 1 and the NMSE of ‘Method 1’ with
are observed to greatly increase at
Figure 10. In
Figure 11 of ‘Highway NLOS’, this phenomenon is not observed. Therefore, we can say that the performance of ‘Method 1’ depends on the channel environment and α. In the low SNR region in
Figure 8 and
Figure 9, ‘Method 1’ has a low ED probability but a high BD (or low GD) probability, which indicates the occurrence of the case
in
Figure 1 and
Figure 2. Therefore, it can be observed that ‘Method 1’ results in a higher NMSE than other methods, in the low SNR region, as shown in
Figure 10 and
Figure 11. On the contrary, ‘Method 2’ and ‘Method 3’ outperform ‘Method 1’ in the low SNR region with respect to the CD, BD, and GD probabilities. In the high SNR region, both ‘Method 2’ and ‘Method 3’ have generally lower CD probabilities, but lower BD probabilities and higher GD probabilities.
In general, both ‘Method 2’ and ‘Method 3’ result in higher GD probabilities for all SNR regions. This results in, as shown in
Figure 10 and
Figure 11, both ‘Method 2’ and ‘Method 3’ showing stable NMSE performance in all SNR ranges.
On the other hand, the performance of ‘Method 1’ depends on SNR and a threshold α. Notice that ‘Method 1’ tends to have better performance at a low SNR when α is large and better performance at a high SNR when α is small. As mentioned above, the NMSE increases slightly at high SNRs due to the time-varying effect of the channel. From the observation results so far, it is confirmed that both ‘Method 2’ and ‘Method 3’, without a threshold α, show a stable performance regardless of the channel environment and SNR.
5.2. Simulation Results for Error Rate Performance
For a PER and BER performance comparison, we present three performance bounds which are ‘Perfect CE’, ‘
’, and ‘
’, respectively. ‘Perfect CE’ denotes that the channel coefficient obtained by DFT on the actual time-varying channel value at the middle position of each OFDM symbol,
, is applied. Both ‘
’ and ‘
’ denote that
from (27) and
from (28) are assumed to be known to the receiver, and then,
with (27) and
with (34) are used, respectively, at the receiver with
in [
7]. Notice that, as mentioned before, for the fractional
case,
, so that ‘
’ denotes the achievable performance bound of the proposed three PDP-based MMSE schemes, which are expressed as ‘Prop–M.1’, ‘Prop–M.2’, and ‘Prop–M.3’.
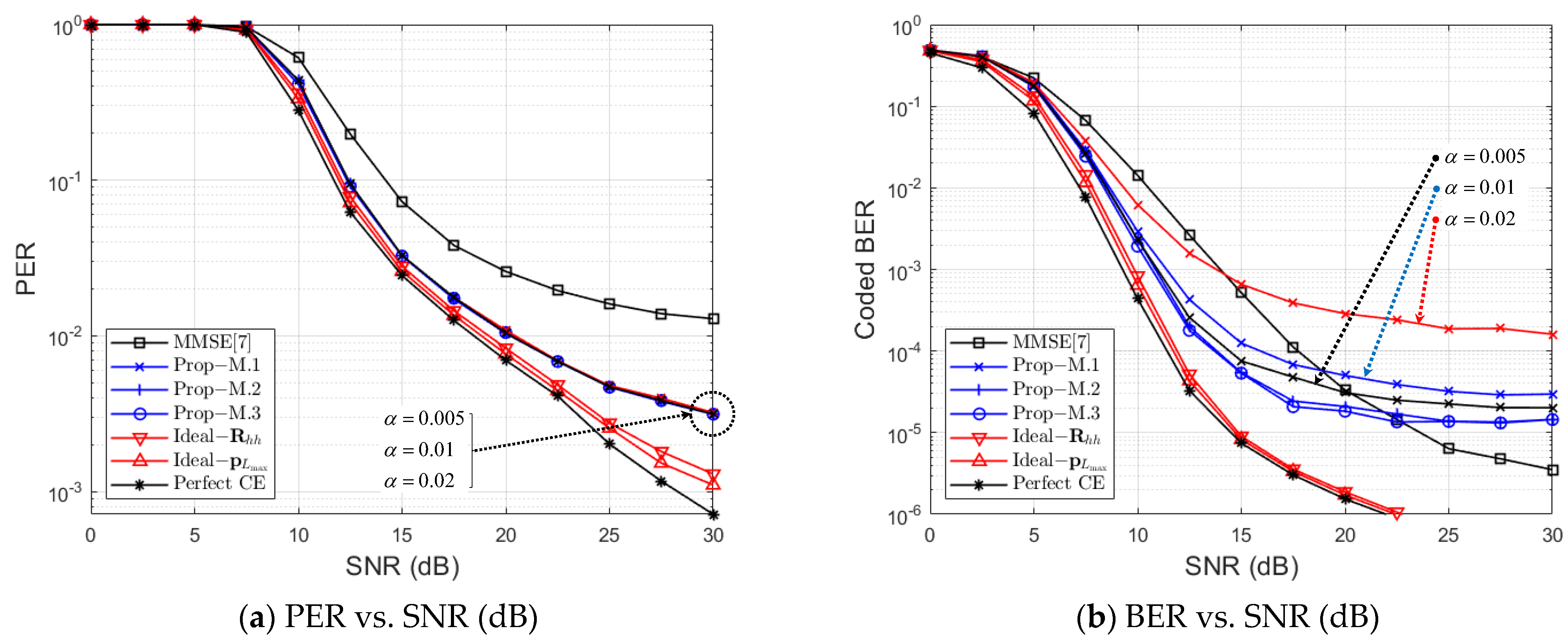
Figure 12 and
Figure 13 show a PER and BER performance comparison with respect to channel estimation schemes under ‘Street Crossing NLOS with 126 km/h’ for QPSK, with
, and
, respectively.
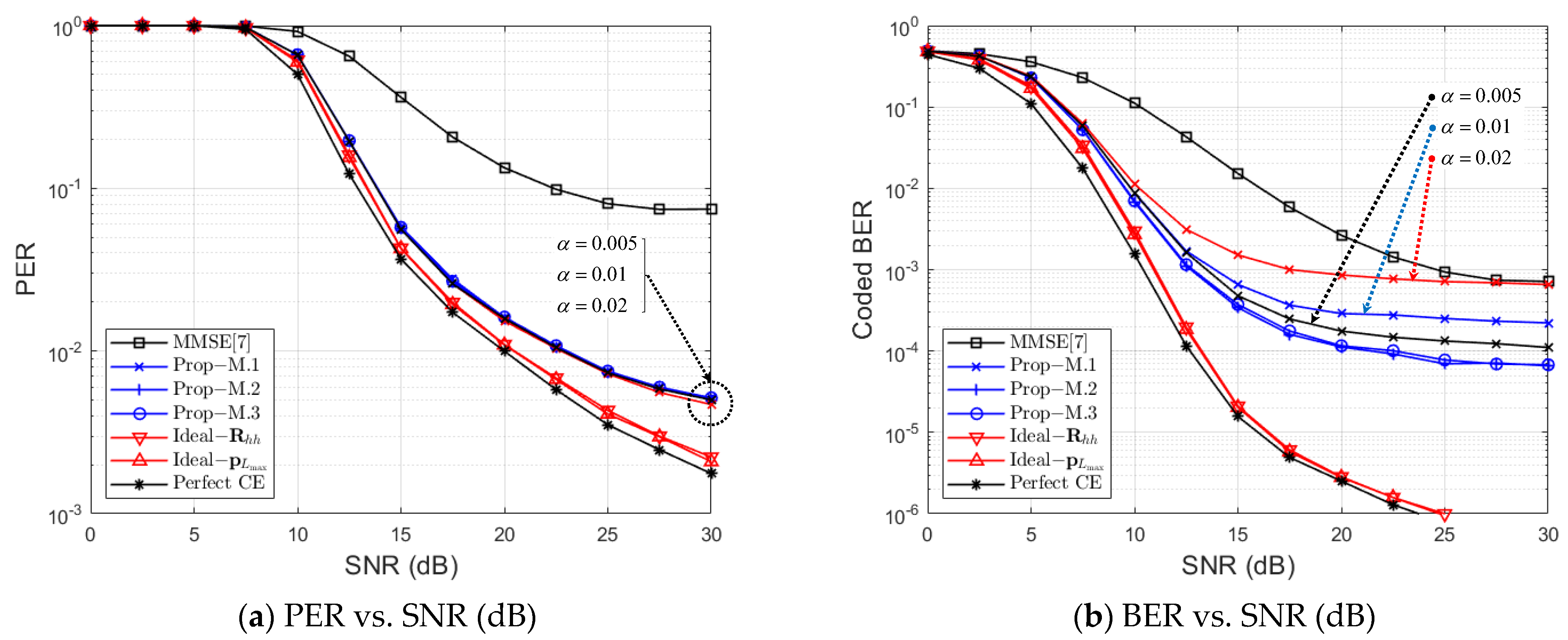
Figure 14 and
Figure 15 show a PER and BER performance comparison with respect to channel estimation schemes under ‘Highway NLOS with 252 km/h’ for QPSK, with
and
, respectively. Note that a threshold
is used for ‘Prop–M.1’ in
Figure 12 and
Figure 14, and
Figure 13 and
Figure 15 show the performance comparison for ‘Prop–M.1’ with respect to threshold α.
First, let us compare three performance bounds for PER and BER. From
Figure 12,
Figure 13,
Figure 14 and
Figure 15, ‘Perfect CE’ shows the lowest error rate bound, and ‘
’ and ‘
’ both show a similar performance to ‘Perfect CE’. Therefore, we can say that, even for the fractional
case, the achievable performance bound of the MMSE-CE method can be obtained by using the proposed PDP-based MMSE-CE methods. Furthermore, it can be confirmed that the proposed three methods can approach the PER performance bound of ‘
’ as
M increases.
In four figures, ‘MMSE [
7]’ indicates the MMSE-CE scheme of [
7], in which an inverse matrix operation is performed for every OFDM symbol. From
Figure 12,
Figure 13,
Figure 14 and
Figure 15, it is verified that the proposed three schemes show better PER performance than ‘MMSE [
7]’ at all SNR regions and all
M. The proposed schemes show better BER performance than ‘MMSE [
7]’ in a specific SNR region in ‘Street Crossing NLOS’, as shown at both
Figure 12b and
Figure 13b, and in all SNR regions in ‘Highway NLOS’, as shown at both
Figure 14b and
Figure 15b. Even though ‘Prop–M.1’, ‘Prop–M.2’, and ‘Prop–M.3’ show similar PER performance, ‘Prop-M.1’ shows a higher BER than both ‘Prop–M.2’ and ‘Prop–M.3’ as shown from
Figure 12b,
Figure 13,
Figure 14 and
Figure 15b. Moreover, as shown in
Figure 13b and
Figure 15b, the BER performance of ‘Prop–M.1’ approaches both ‘Prop–M.2’ and ‘Prop–M.3’ as the threshold α decreases. This is because, when the threshold α is reduced in ’Method 1’, both the ED and GD performance are improved, as shown in
Figure 8b and
Figure 9b, and the noise variance estimation performance is improved, as shown in
Figure 10b and
Figure 11b. Furthermore, from
Figure 12 and
Figure 15, it is shown that the proposed methods can achieve
at a reasonable SNR.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}