
Adaptive Satellite Navigation Anti-Interference Algorithm Based on Inverse Cosine Function
Abstract
:1. Introduction
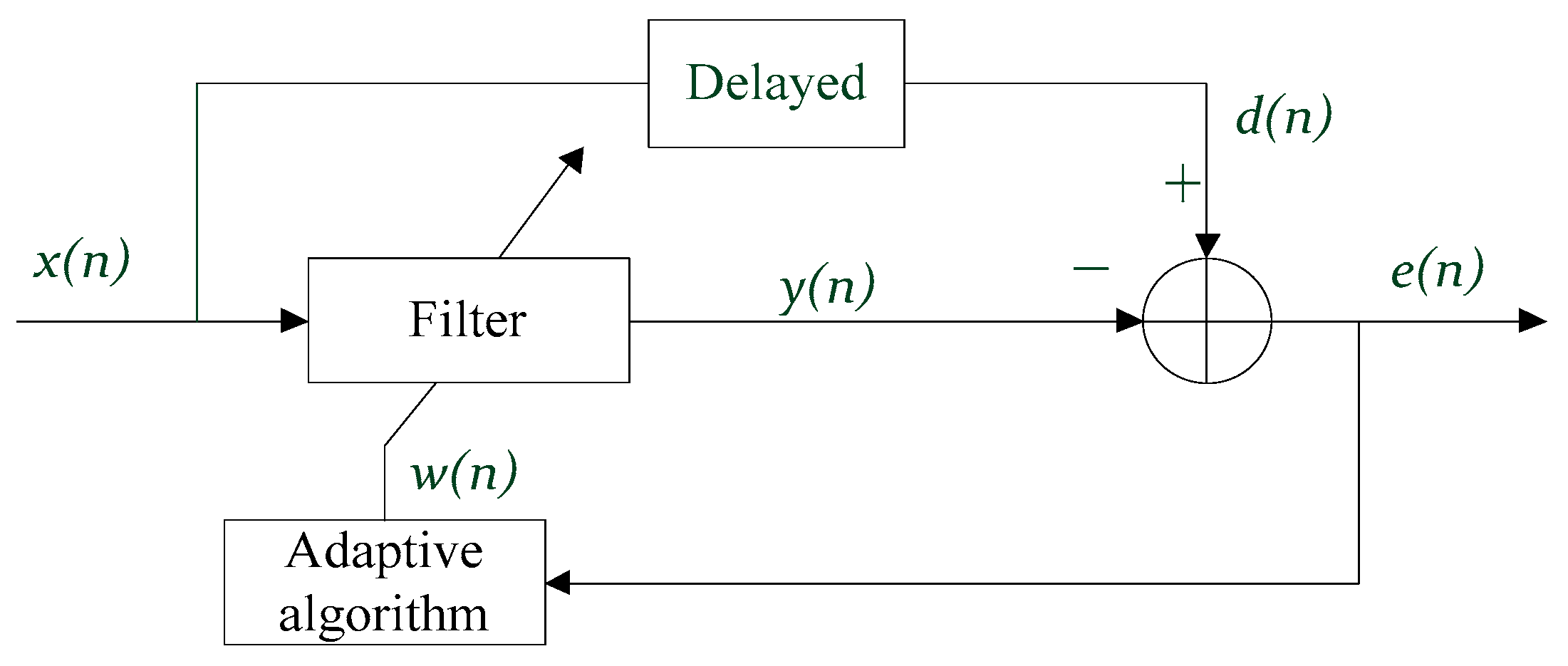
2. LMS Algorithm Interference Suppression Principle
3. Improved Variable Step Size LMS Algorithm
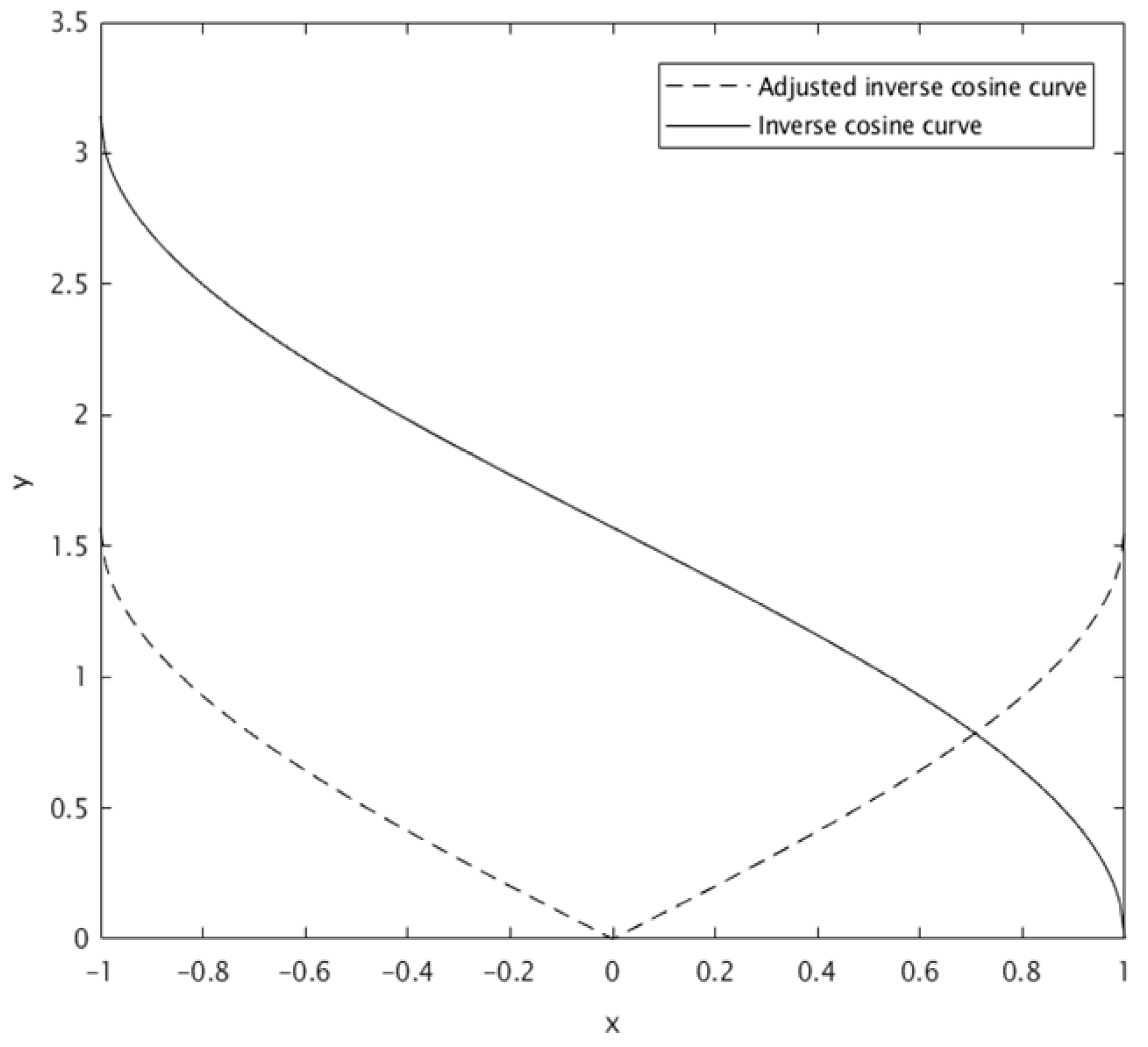
3.1. Improved Inverse Cosine Variable Step Size LMS Algorithm
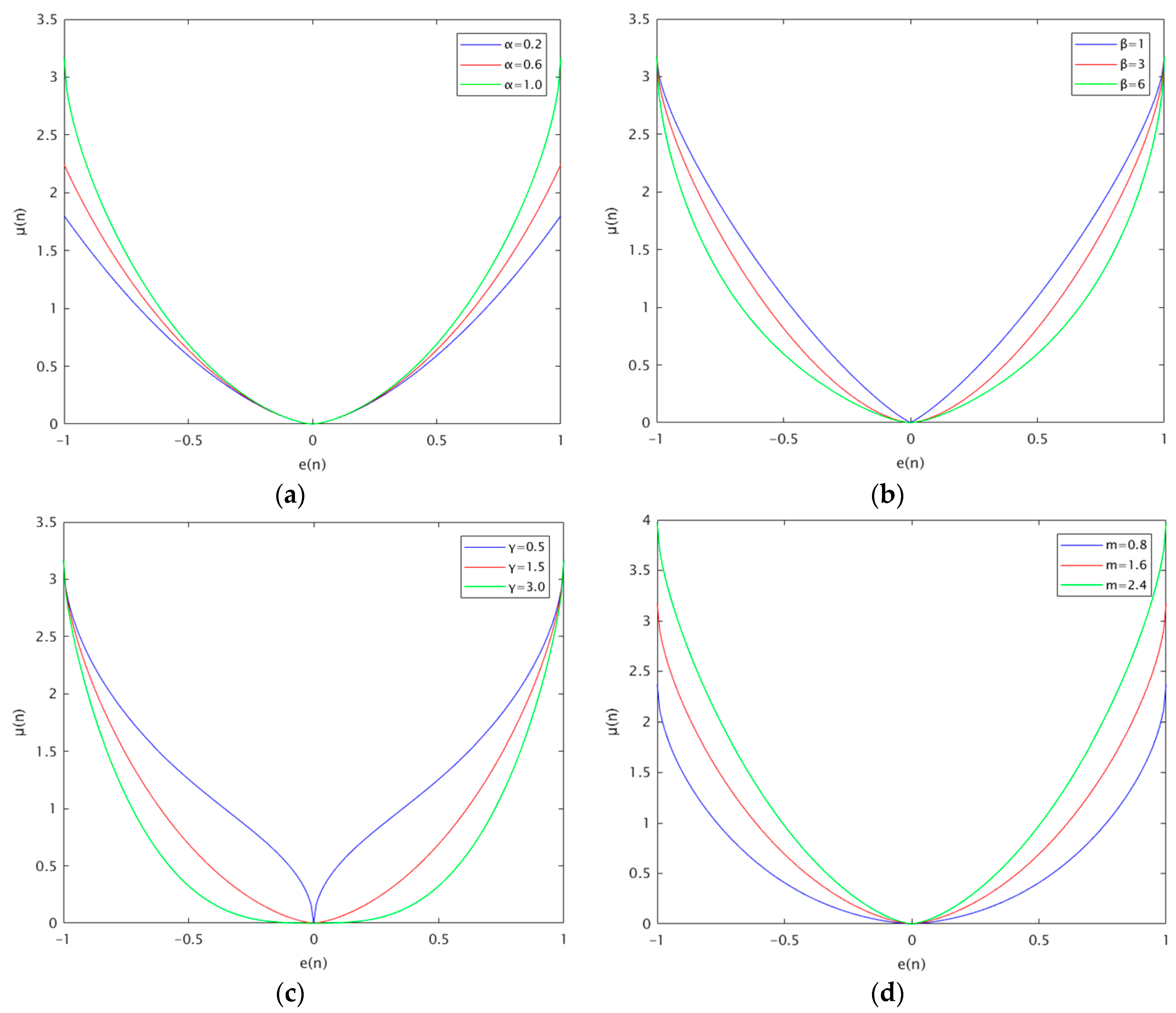
3.2. Influence of Parameters on The ICVS-LMS Algorithm
4. Simulation Analysis
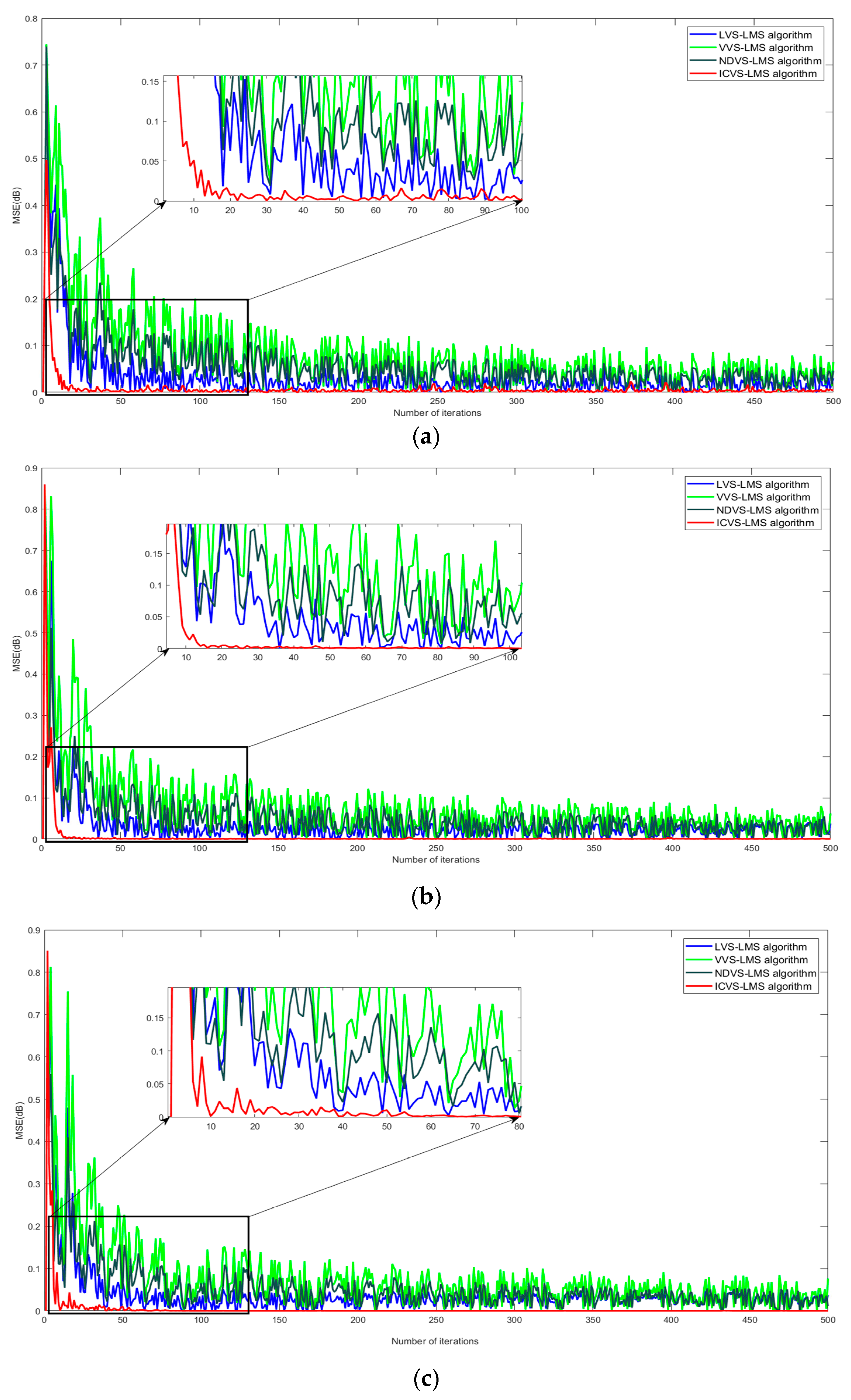
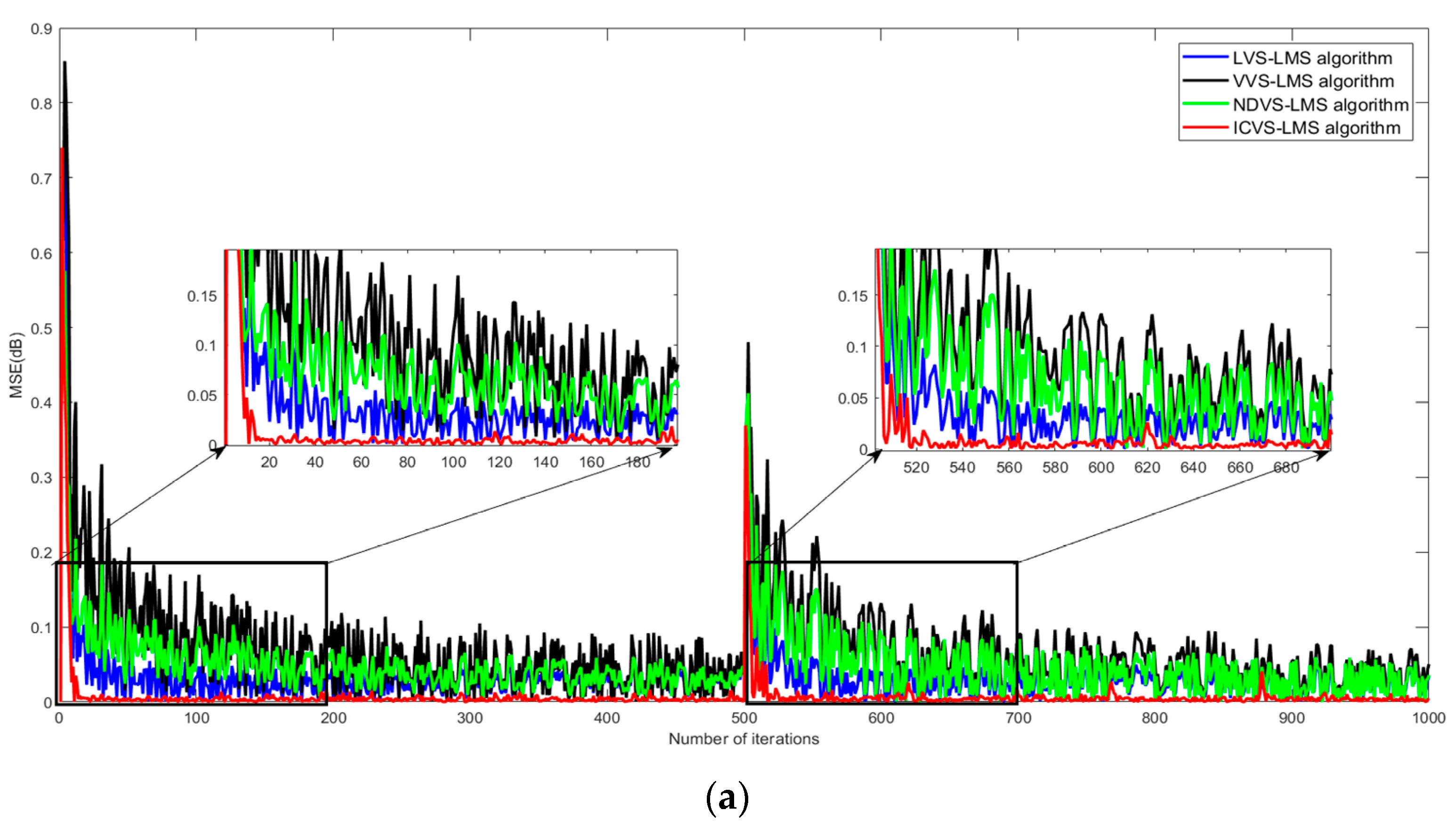
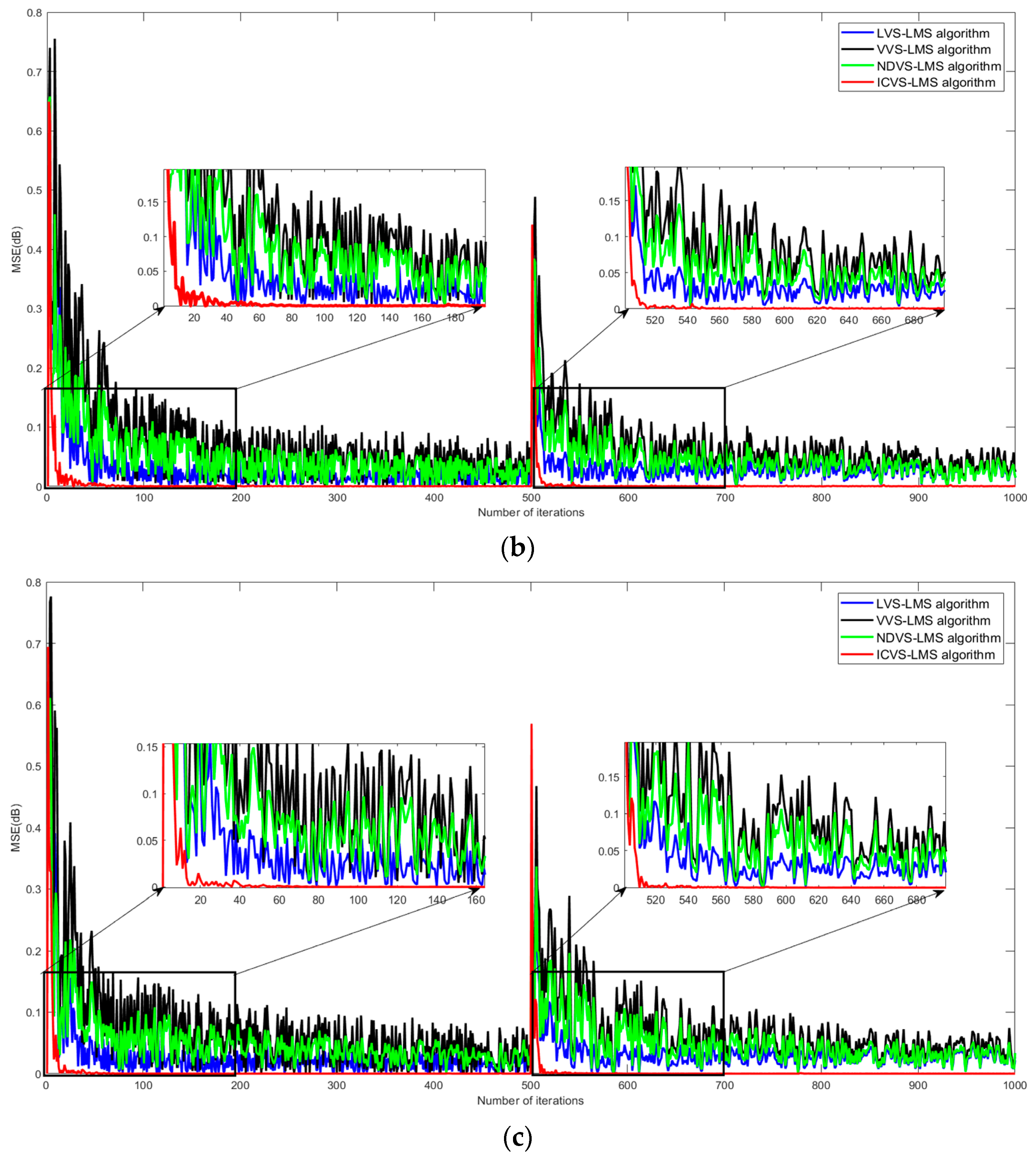
4.1. Performance Verification of The Improved Variable Step Size Algorithm
4.2. Navigation Interference Suppression Effect Analysis
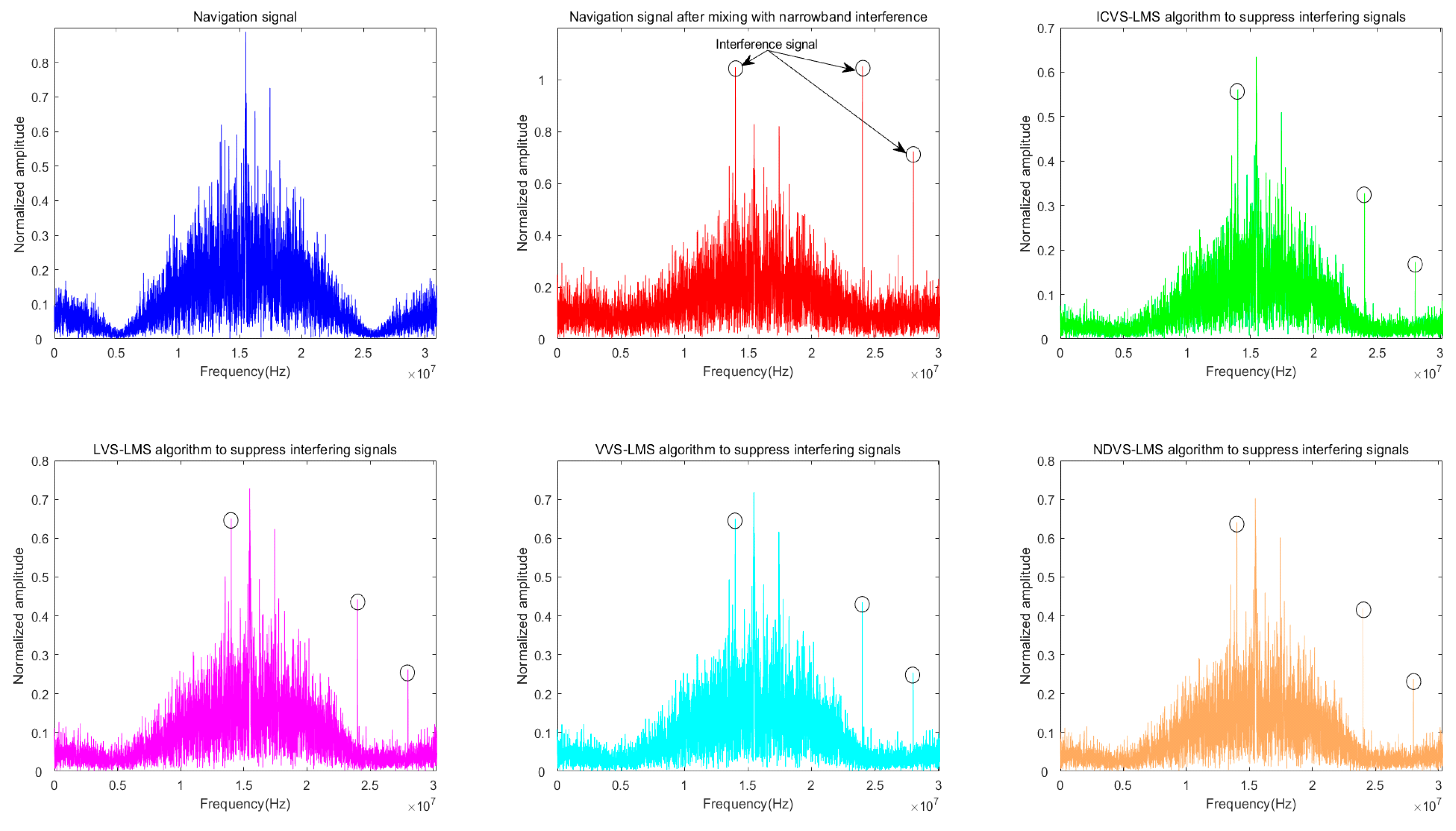
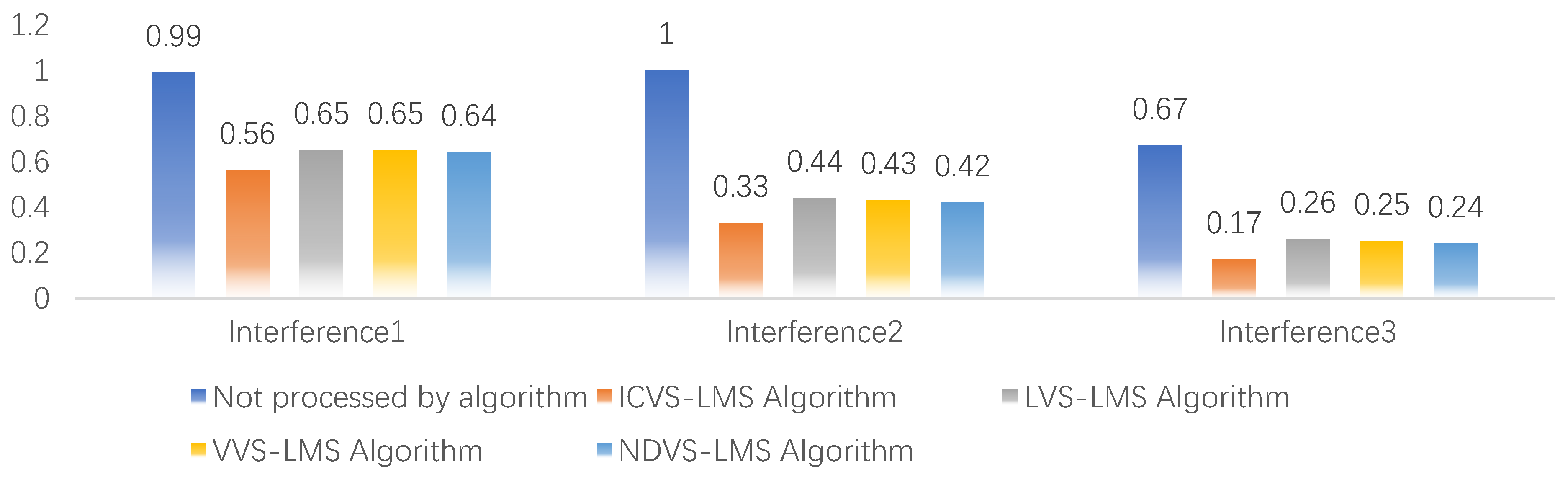
4.2.1. Simulation Verification of Interference Suppression Performance
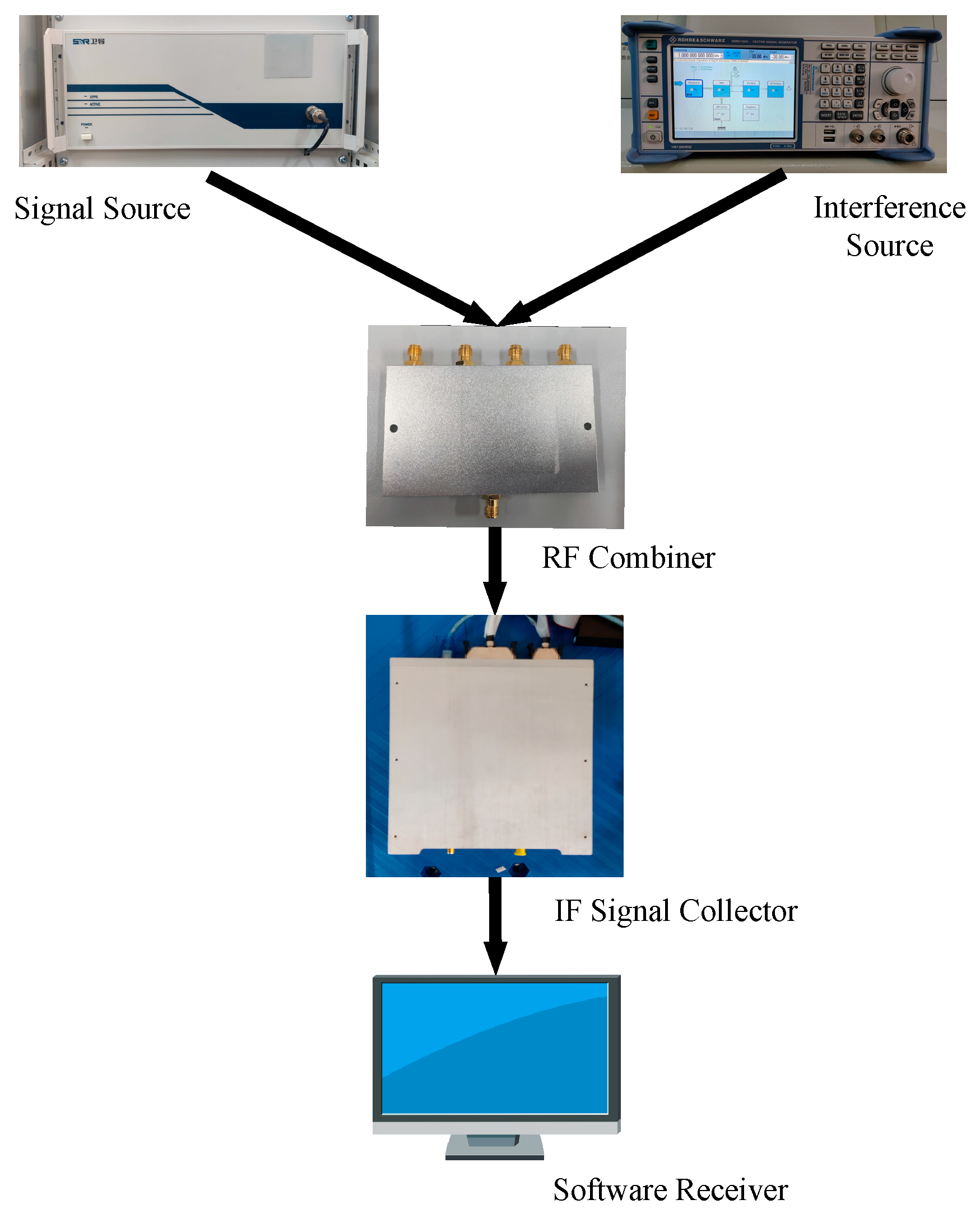
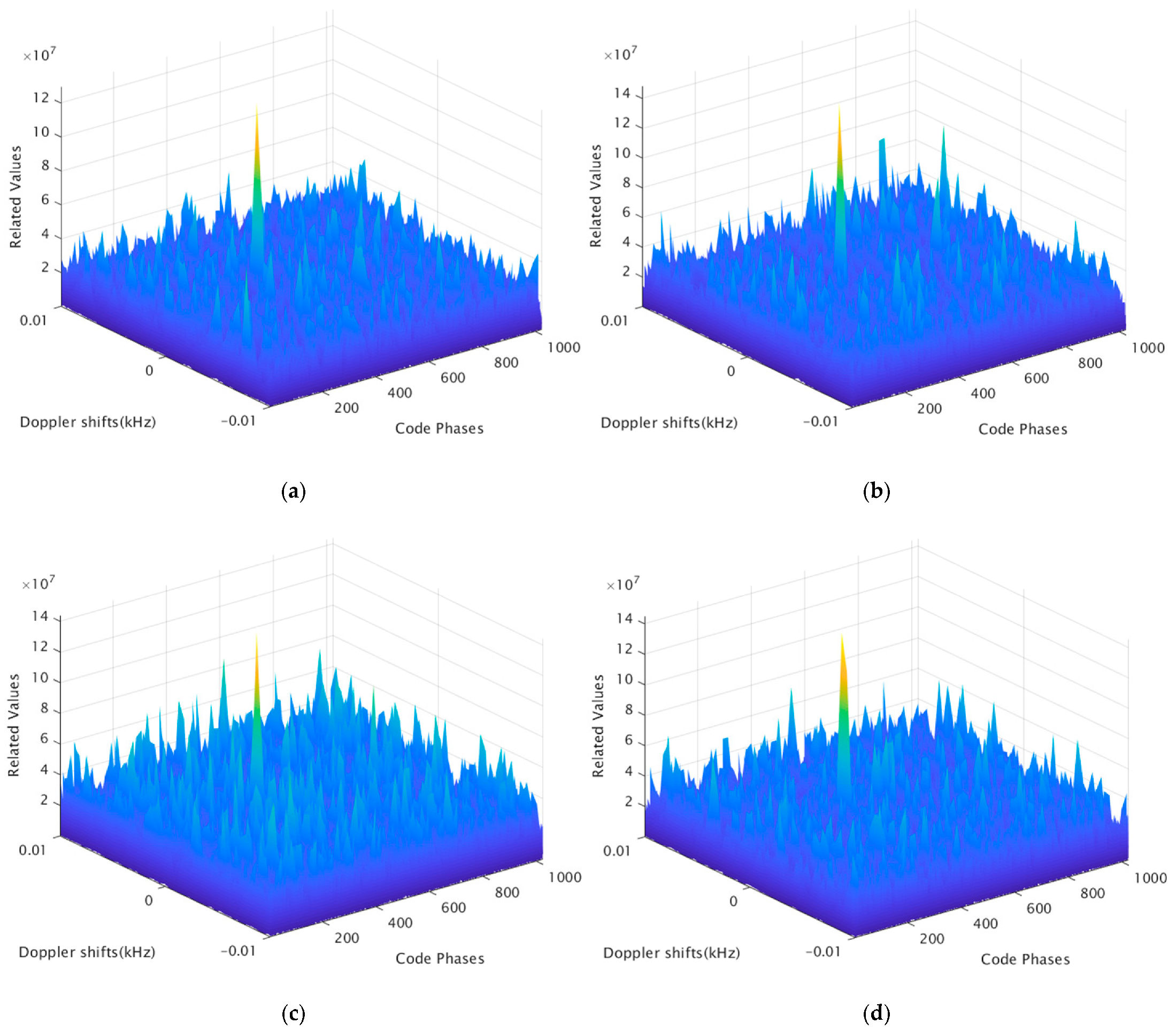
4.2.2. Experimental Verification of Interference Suppression Performance
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wei, Q.; Gao, Y.; Chen, X.; Huang, Z.; Kuang, L. Spatial Filtering for Interference Mitigation in High-Altitude Spaceborne GNSS Receivers. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 274–291. [Google Scholar] [CrossRef]
- Huang, L.; Lu, Z.; Xiao, Z.; Ren, C.; Song, J.; Li, B. Suppression of Jammer Multipath in GNSS Antenna Array Receiver. Remote Sens. 2022, 14, 350. [Google Scholar] [CrossRef]
- Merwe, J.; Cortés, I.; Garzia, F.; Rügamer, A.; Felber, W. Exotic FMCW Waveform Mitigation with an Advanced Multi-Parameter Adaptive Notch Filter (MPANF). In Proceedings of the 35th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2022), Denver, Colorado, 19–23 September 2022; pp. 3783–3819. [Google Scholar]
- Chen, X.; He, D.; Yan, X.; Yu, W.; Truong, T.-K. GNSS Interference Type Recognition with Fingerprint Spectrum DNN Method. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 4745–4760. [Google Scholar] [CrossRef]
- Lu, Z.; Chen, F.; Xie, Y.; Sun, Y.; Cai, H. High Precision Pseudo-Range Measurement in GNSS Anti-Jamming Antenna Array Processing. Electronics 2020, 9, 412. [Google Scholar] [CrossRef]
- Cao, Y.; Bai, H.; Jin, K.; Zou, G. An GNSS/INS Integrated Navigation Algorithm Based on PSO-LSTM in Satellite Rejection. Electronics 2023, 12, 2905. [Google Scholar] [CrossRef]
- Kim, H.; Lee, J.; Oh, S.H.; So, H.; Hwang, D.-H. Multi-Radio Integrated Navigation System M&S Software Design for GNSS Backup under Navigation Warfare. Electronics 2019, 8, 188. [Google Scholar]
- Chien, Y.R.; Chen, P.Y.; Fang, S.H. Novel Anti-Jamming Algorithm for GNSS Receivers Using Wavelet-Packet-Transform-Based Adaptive Predictors. IEICE Trans. Fundam. Electron. Commun. Comput. Sci. 2017, E100-A, 602–610. [Google Scholar] [CrossRef]
- Wang, P.; Cetin, E.; Dempster, A.G.; Wang, Y.; Wu, S. GNSS Interference Detection Using Statistical Analysis in the Time-Frequency Domain. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 416–428. [Google Scholar] [CrossRef]
- Hwang, S.S. Adaptive Algorithms for a GPS Interference Suppression Receiver and a Sparse Reconfigurable Adaptive Filter. Ph.D. Thesis, University of California, Santa Barbara, CA, USA, 2006. [Google Scholar]
- Džunda, M.; Melníková, L. The Influence of Narrowband Interference on DME System Operation. Aerospace 2023, 10, 663. [Google Scholar] [CrossRef]
- Li, X.; Chen, F.; Lu, Z.; Liu, Z.; Ou, G. Overview of Anti-Jamming Technology Based on GNSS Single-Antenna Receiver. In Proceedings of the ICGDA 2020: Proceedings of the 2020 3rd International Conference on Geoinformatics and Data Analysis, New York, NY, USA, 15–17 April 2020; pp. 96–104.
- Mosavi, M.R.; Shafiee, F. Narrowband Interference Suppression for GPS Navigation Using Neural Networks. GPS Solut. 2016, 20, 341–351. [Google Scholar] [CrossRef]
- Zou, M.; Chen, J.; Luo, J.; Hu, Z.; Chen, S. Equilibrium Approximating and Online Learning for Anti-Jamming Game of Satellite Communication Power Allocation. Electronics 2022, 11, 3526. [Google Scholar] [CrossRef]
- Wang, P.; Wang, Y.; Cetin, E.; Dempster, A.G.; Wu, S. GNSS Jamming Mitigation Using Adaptive-Partitioned Subspace Projection Technique. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 343–355. [Google Scholar] [CrossRef]
- Shi, K.; Jia, Y.; Fu, S.; Cao, Z.; Chen, P. Adaptive Narrowband Antijam Method for Satellite Navigation. In Proceedings of the 2018 International Conference on Electromagnetics in Advanced Applications (ICEAA), Cartagena, Colombia, 10–14 September 2018; pp. 687–690. [Google Scholar]
- Li, X.H. Research on Time Domain Adaptive Anti-Jamming Technology for Satellite Navigation. Master’s Thesis, National University of Defense Technology, Changsha, China, 2020. [Google Scholar]
- Liu, W.; Lu, Z.; Wang, Z.; Li, X.; Li, Z.; Xiao, W.; Ye, Z.; Wang, Z.; Song, J.; Qiao, J.; et al. Sidelobes Suppression for Time Domain Anti-Jamming of Satellite Navigation Receivers. Remote Sens. 2022, 14, 5609. [Google Scholar] [CrossRef]
- Wang, S.; Wang, S.; Sun, X. A Multi-Scale Anti-Multipath Algorithm for GNSS-RTK Monitoring Application. Sensors 2023, 23, 8396. [Google Scholar] [CrossRef]
- Chien, Y.-R. Wavelet Packet Transform-Based Anti-Jamming Scheme with New Threshold Selection Algorithm for GPS Receivers. J. Chin. Inst. Eng. 2018, 41, 181–185. [Google Scholar] [CrossRef]
- Song, J.; Lu, Z.; Liu, Z.; Xiao, Z.; Dang, C. A Review of Time Domain Adaptive Anti-Jamming Techniques for Satellite Navigation. Syst. Eng. Electron. Technol. 2023, 45, 1164–1176. [Google Scholar]
- Kwong, R.H.; Johnston, E.W. A Variable Step Size LMS Algorithm. IEEE Trans. Signal Process. 1992, 40, 1633–1642. [Google Scholar] [CrossRef]
- Jiang, T.; Liu, J.; Peng, C.; Wang, S. Laboratory Test of a Vehicle Active Noise-Control System Based on an Adaptive Step Size Algorithm. Appl. Sci. 2023, 13, 225. [Google Scholar] [CrossRef]
- Qin, J.; Ouyang, J. A New Variable Step Length LMS Adaptive Filtering Algorithm. J. Data Acquis. Process. 1997, 3, 171–194. [Google Scholar]
- Zhang, H.; Han, W. A New Variable-Step LMS Adaptive Filtering Algorithm Research and Its Application. Chin. J. Sci. Instrum. 2015, 36, 1822–1830. [Google Scholar]
- Karthik, M.; Panda, A.K. Hyperbolic Secant LMS Algorithm to Enhance Performance of a Three-Phase Single-Stage Grid Connected PV System. In Proceedings of the 2023 IEEE IAS Global Conference on Renewable Energy and Hydrogen Technologies (GlobConHT), Male, Maldives, 11–12 March 2023; pp. 1–6. [Google Scholar]
- Li, D.; Liu, J.; Zhao, J.; Wu, G.; Zhao, X. An Improved Space-Time Joint Anti-Jamming Algorithm Based on Variable Step LMS. Tsinghua Sci. Technol. 2017, 22, 520–528. [Google Scholar] [CrossRef]
- Jalal, B.; Yang, X.; Liu, Q.; Long, T.; Sarkar, T.K. Fast and Robust Variable-Step-Size LMS Algorithm for Adaptive Beamforming. IEEE Antennas Wireless Propag. Lett. 2020, 19, 1206–1210. [Google Scholar] [CrossRef]
- Huo, Y.; An, Y.; Gong, Q.; Lian, P. Variable Step Size LMS Algorithm Based on Inverse Hyperbolic Tangent Function. Trans. Beijing Inst. Technol. 2022, 42, 1051–1058. [Google Scholar]
- Wang, S.; Xiang, J.; Peng, F.; Xiao, B. A New Fastest Descent Algorithm for Adaptive Noise Pair Elimination. J. Beijing Univ. Aeronaut. Astronaut. 2021, 47, 1462–1469. [Google Scholar]
- Wang, J.; Peng, J.; Xu, X.; You, X.; Liu, S. A Single-input Narrow-band Interference Suppression and Smoothing Algorithm Based on LMS Filter. In Proceedings of the 2019 IEEE 2nd International Conference on Electronic Information and Communication Technology (ICEICT), Harbin, China, 20–22 January 2019; pp. 192–198. [Google Scholar]
- Mohaddes, F.; da Silva, R.L.; Akbulut, F.P.; Zhou, Y.; Tanneeru, A.; Lobaton, E.; Lee, B.; Misra, V. A Pipeline for Adaptive Filtering and Transformation of Noisy Left-Arm ECG to Its Surrogate Chest Signal. Electronics 2020, 9, 866. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, N.; Chambers, J.A.; Sayed, A.H. Steady-State Performance Analysis of a Variable Tap-Length LMS Algorithm. IEEE Trans. Signal Process. 2008, 56, 839–845. [Google Scholar] [CrossRef]
- Yang, F. Research on Anti-Narrowband Interference Technology for BeiDou Satellite Navigation Receivers. Master’s Thesis, Beijing Jiaotong University, Beijing, China, 2019. [Google Scholar]
- Lu, Y.; Qiao, G.; Yang, C.; Zhao, Y.; Yang, G.; Li, H. A Real-Time Digital Self Interference Cancellation Method for In-Band Full-Duplex Underwater Acoustic Communication Based on Improved VSS-LMS Algorithm. Remote Sens. 2022, 14, 2924. [Google Scholar] [CrossRef]
- Wu, C.; Weng, J. A New Variable Step Size LMS Algorithm Based on Softsign Function. In Proceedings of the ICMLCA 2021, 2nd International Conference on Machine Learning and Computer Application, Shenyang, China, 17–19 December 2021; pp. 1–4. [Google Scholar]
- Yang, S.; Li, N.; Zhang, X. Improved Variable Step Size LMS Algorithm Based on Arctangent Function. In Proceedings of the 2021 China Automation Congress (CAC), Beijing, China, 22–24 October 2021; pp. 4666–4669. [Google Scholar]
- Ru, B.; Huang, Y.; Guo, Y.; Gan, L. A New Variable-Step LMS Algorithm Based on Logarithmic Functions. J. Wuhan Univ. (Nat. Sci. Ed.) 2015, 61, 295–298. [Google Scholar]
- Yu, Y.; Zhao, H. An Improved Variable Step-Size NLMS Algorithm Based on a Versiera Function. In Proceedings of the 2013 IEEE International Conference on Signal Processing, Communication and Computing (ICSPCC 2013), Kunming, China, 5–8 August 2013; pp. 1–4. [Google Scholar]
- Ma, K.; Wang, P.; Wu, C. A Variable-Step LMS Algorithm Based on a Normal Distribution Curve. Comput. Simul. 2019, 36, 295–299. [Google Scholar]
- Rusu, A.-G.; Ciochină, S.; Paleologu, C. On the Step-Size Optimization of the LMS Algorithm. In Proceedings of the 2019 42nd International Conference on Telecommunications and Signal Processing (TSP), Budapest, Hungary, 1–3 July 2019; pp. 168–173. [Google Scholar]
- Lu, Z.; Nie, J.; Chen, F.; Chen, F.; Ou, G. Adaptive Time Taps of STAP Under Channel Mismatch for GNSS Antenna Arrays. IEEE Trans. Instrum. Meas. 2017, 66, 2813–2824. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SNR (dB) | LVS-LMS Algorithm | VVS-LMS Algorithm | NDVS-LMS Algorithm | ICVS-LMS Algorithm |
|---|---|---|---|---|
| 20 | 170 | 380 | 360 | 30 |
| 30 | 200 | 400 | 380 | 60 |
| 40 | 260 | 430 | 450 | 100 |
| Interference Signals | LVS-LMS Algorithm | VVS-LMS Algorithm | NDVS-LMS Algorithm | ICVS-LMS Algorithm |
|---|---|---|---|---|
| Interference1 | 38.86% | 37.99% | 38.77% | 46.40% |
| Interference2 | 57.98% | 58.71% | 60.19% | 69.13% |
| Interference3 | 63.88% | 65.09% | 67.15% | 76.10% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qu, P.; Yuan, Z.; Wang, E.; Xu, S.; Liu, T. Adaptive Satellite Navigation Anti-Interference Algorithm Based on Inverse Cosine Function. Electronics 2023, 12, 4437. https://doi.org/10.3390/electronics12214437
Qu P, Yuan Z, Wang E, Xu S, Liu T. Adaptive Satellite Navigation Anti-Interference Algorithm Based on Inverse Cosine Function. Electronics. 2023; 12(21):4437. https://doi.org/10.3390/electronics12214437
Chicago/Turabian StyleQu, Pingping, Zibo Yuan, Ershen Wang, Song Xu, and Tianfeng Liu. 2023. "Adaptive Satellite Navigation Anti-Interference Algorithm Based on Inverse Cosine Function" Electronics 12, no. 21: 4437. https://doi.org/10.3390/electronics12214437