

Optimal Camera Placement to Generate 3D Reconstruction of a Mixed-Reality Human in Real Environments



Abstract
:1. Introduction
2. Related Work
2.1. Mixed Reality
2.2. Reconstruction
2.3. Optimal Camera Placement
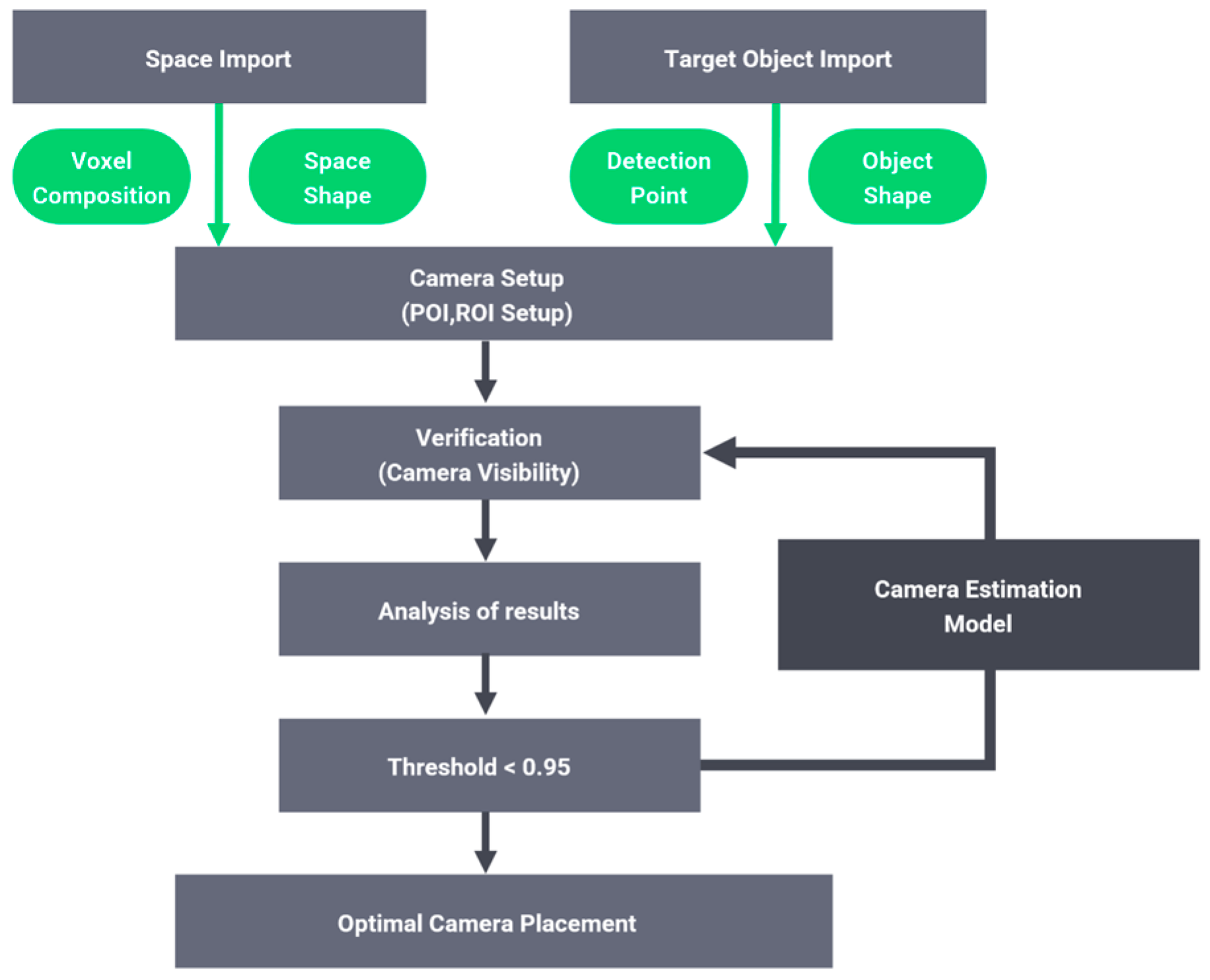
3. System Overview
4. Implementation
| Algorithm 1: Optimal Camera Placement Algorithm. Optimal camera placement procedure to evaluate visibility of the target object to find the minimum number of multiple cameras required. |
| Input: Space, Target Object Position(T), Camera POI(P)&ROI(R) setup |
| Output: Optimal Camera Placement (C) |
| Function OCP(C, P, R, T) |
| While not_empty(C) |
| c_random = random_choice(C) |
| // Randomly select a camera from the set of multiple cameras. |
| V_c = {} // Visibility set for c_random |
| //Check detection pointin the field of view of camera |
| For each point p in P |
| If detect(c_random, p) <= R |
| Add p to V_c |
| End For |
| V_c_prime = V_c |
| // Define as the set of Detection Points newly detected |
| // by , excluding those already detected by other cameras. |
| For each camera c_i in C − {c_random} |
| V_c_i = {} // Visibility set for c_i |
| For each point p in P |
| If distance(c_i, p) <= R |
| Add p to V_c_i |
| End For |
| V_c_prime = V_c_prime − V_c_i |
| End For |
| // Calculate V′(c) by removing overlapping points from other cameras |
| // Calculate DR_before and DR_after |
| DR_before = union_of_all_visibility_sets(C) |
| // Represent the Detection Rate excluding as |
| DR_after = union_of_all_visibility_sets(C − {c_random}) |
| // Represent the Detection Rate after removing as |
| // Check the conditions and possibly remove c_random |
| // is greater than or equal to the threshold (e.g., 0.95) |
| If DR_after >= T and is_empty(V_c_prime) |
| Remove c_random from C |
| End If |
| End While |
| End Function |
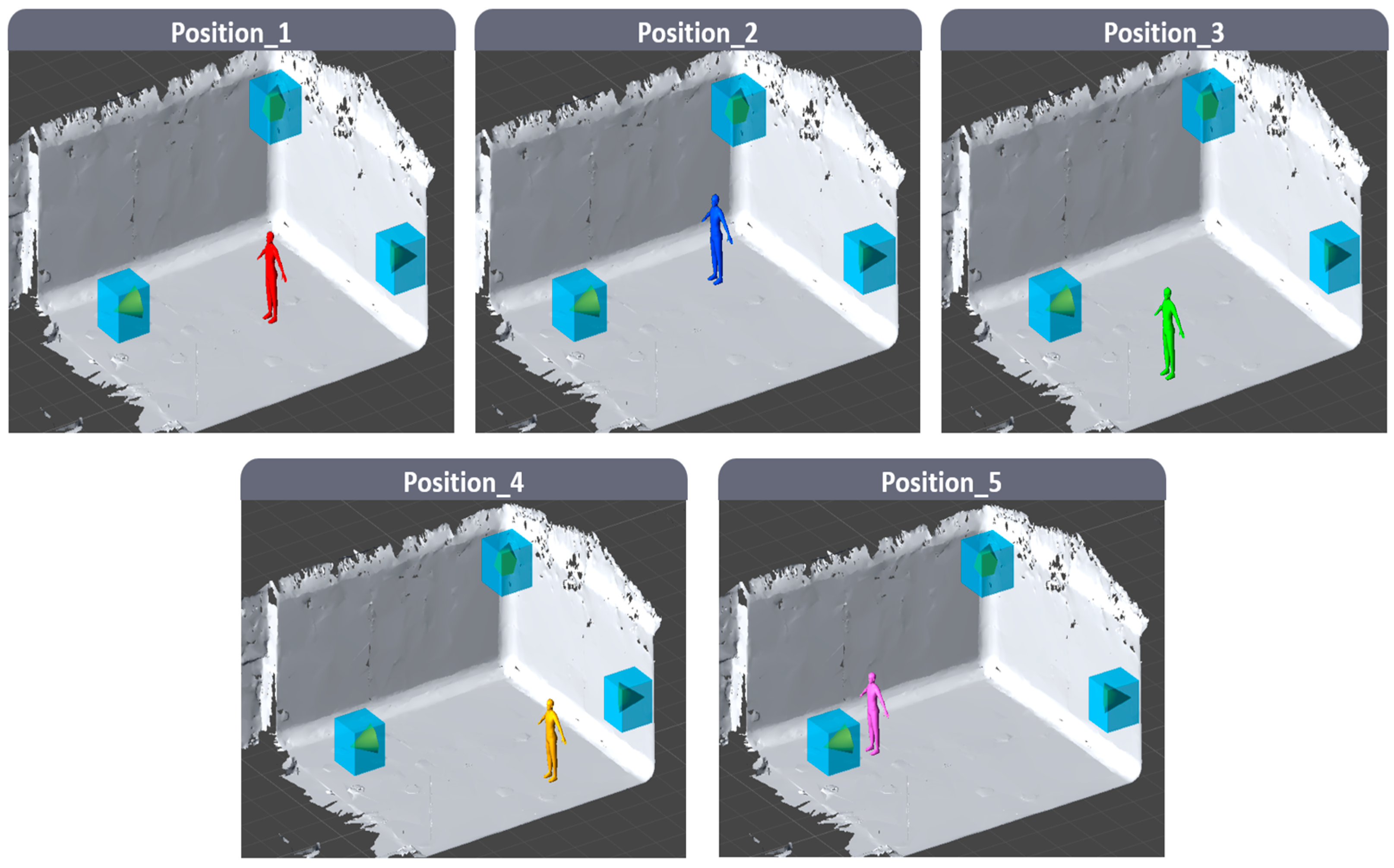
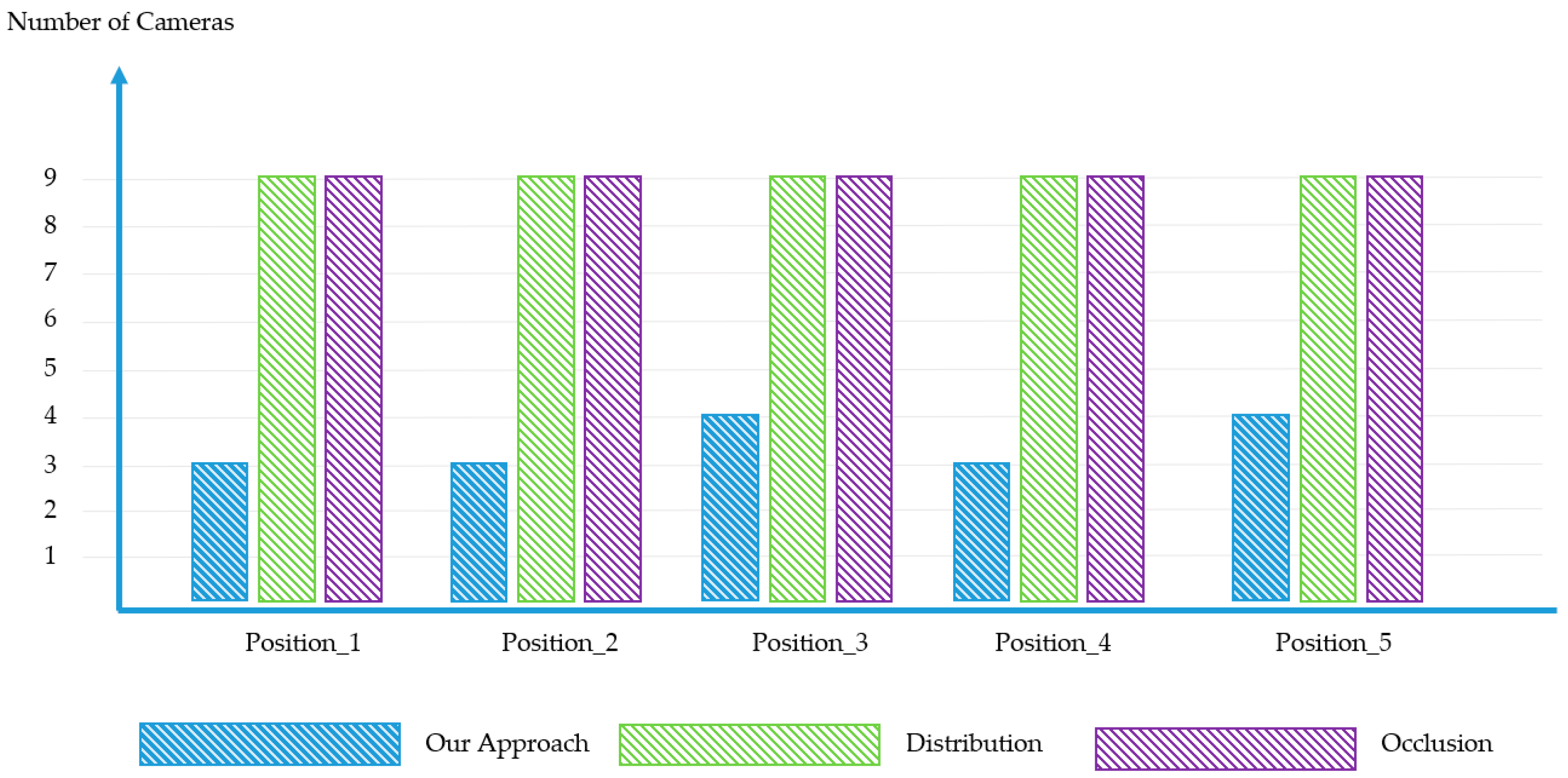
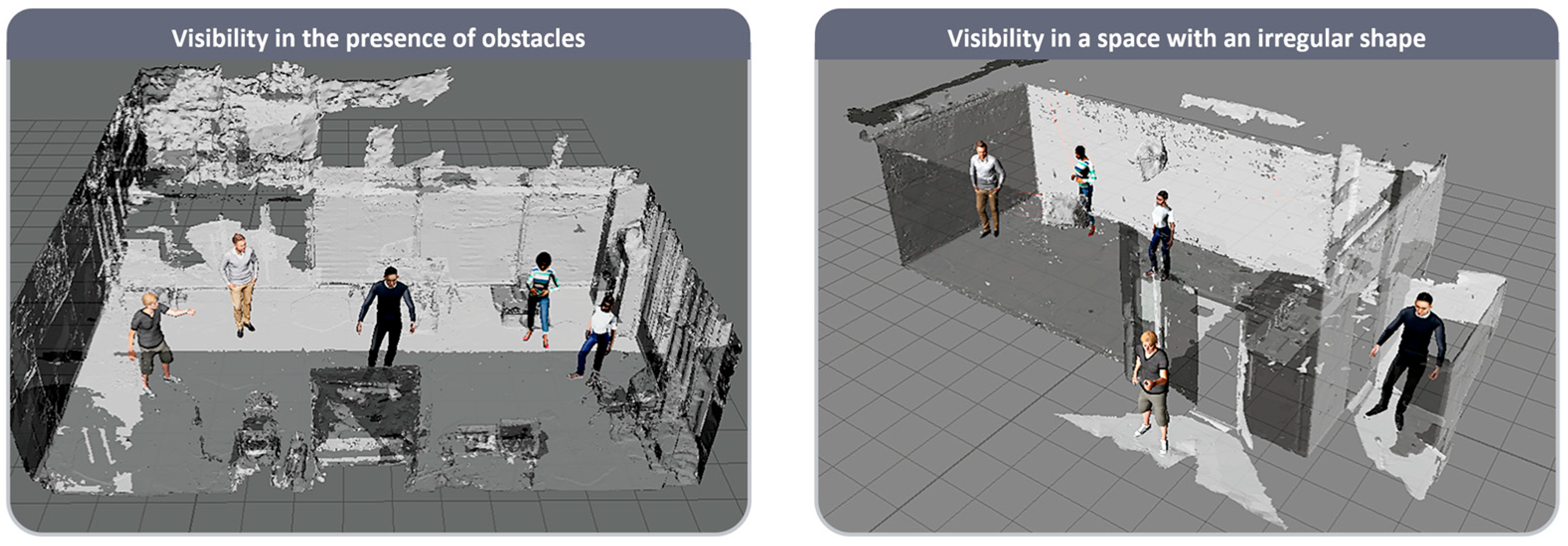
5. Experiment and Discussion
6. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Boschert, S.; Rosen, R. Digital twin—The simulation aspect. Mechatron. Futures Chall. Solut. Mechatron. Syst. Des. 2016, 59–74. [Google Scholar] [CrossRef]
- Tao, F.; Zhang, H.; Liu, A.; Nee, A.Y.C. Digital twin in industry: State-of-the-art. IEEE Trans. Ind. Inform. 2018, 15, 2405–2415. [Google Scholar] [CrossRef]
- Jo, D.; Kim, K.H.; Kim, G.J. SpaceTime: Adaptive control of the teleported avatar for improved AR tele-conference experience. Comput. Anim. Virtual Worlds 2015, 26, 259–269. [Google Scholar] [CrossRef]
- Xue, H.; Sharma, P.; Wild, F. User satisfaction in augmented reality-based training using Microsoft HoloLens. Computers 2019, 8, 9. [Google Scholar] [CrossRef]
- Zhao, Q. A survey on virtual reality. Sci. China F 2009, 52, 348–400. [Google Scholar] [CrossRef]
- Steinitz, A.A. Optimal Camera Placement. Doctoral Dissertation, University of California Berkeley, Berkeley, CA, USA, 2012. [Google Scholar]
- Azuma, R.T. A survey of augmented reality. Presence Teleoperators Virtual Environ. 1997, 6, 355–385. [Google Scholar] [CrossRef]
- An, Q.; Shen, Y. Camera configuration design in cooperative active visual 3-d reconstruction: A statistical approach. In Proceedings of the ICASSP 2020–2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020; IEEE: New York, NY, USA, 2020; pp. 2473–2477. [Google Scholar] [CrossRef]
- Yang, J.; Li, H.; Campbell, D.; Jia, Y. Go-ICP: A globally optimal solution to 3D ICP point-set registration. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 2241–2254. [Google Scholar] [CrossRef]
- Kim, J.H.; Jo, D.S. Optimal camera placement leaning of multiple cameras for 3D environment reconstruction. Korean Inst. Smart Media 2022, 11, 75–80. [Google Scholar] [CrossRef]
- Kim, D.; Jo, D. Effects on co-presence of a virtual human: A comparison of display and interaction types. Electronics 2022, 11, 367. [Google Scholar] [CrossRef]
- Rahimian, P.; Kearney, J.K. Optimal camera placement for motion capture systems. IEEE Trans. Vis. Comput. Graph. 2017, 23, 1209–1221. [Google Scholar] [CrossRef]
- Han, X.F.; Laga, H.; Bennamoun, M. Image-based 3D object reconstruction: State-of-the-art and trends in the deep learning era. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 43, 1578–1604. [Google Scholar] [CrossRef]
- Junyi, H.; Lei, Y.; Shumin, F. A high-quality voxel 3D reconstruction system for large scenes based on the branch and bound method. Expert Syst. Appl. 2022, 194, 116549. [Google Scholar] [CrossRef]
- Slater, M.; Lotto, B.; Arnold, M.M.; Sanchez-Vives, M.V. How we experience immersive virtual environments: The concept of presence and its measurement. Anu. Depsicol. 2009, 40, 193–210. [Google Scholar]
- Shin, D. Empathy and embodied experience in virtual environment: To what extent can virtual reality stimulate empathy and embodied experience? Comput. Hum. Behav. 2018, 78, 64–73. [Google Scholar] [CrossRef]
- Witmer, B.G.; Singer, M.J. Measuring presence in virtual environments: A presence questionnaire. Presence 1998, 7, 225–240. [Google Scholar] [CrossRef]
- Orts-Escolano, S.; Rhemann, C.; Fanello, S.; Chang, W.; Kowdle, A.; Degtyarev, Y.; Kim, D.; Davidson, P.L.; Khamis, S.; Dou, M.; et al. Holoportation: Virtual 3d teleportation in real-time. In Proceedings of the 29th Annual Symposium on User Interface Software and Technology, Tokyo, Japan, 16–19 October 2016; pp. 741–754. [Google Scholar] [CrossRef]
- Speicher, M.; Hall, B.D.; Nebeling, M. What is mixed reality? In Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems, Glasgow, Scotland, UK, 4–9 May 2019; pp. 1–15. [Google Scholar] [CrossRef]
- Shin, K.S.; Kim, H.; Lee, J.G.; Jo, D. Exploring the effects of scale and color differences on users’ perception for everyday mixed reality (MR) experience: Toward comparative analysis using MR devices. Electronics 2020, 9, 1623. [Google Scholar] [CrossRef]
- Simeone, A.L.; Velloso, E.; Gellersen, H. Substitutional reality: Using the physical environment to design virtual reality experiences. In Proceedings of the 33rd Annual ACM Conference on Human Factors in Computing Systems, Seoul, Republic of Korea, 18–23 April 2015; pp. 3307–3316. [Google Scholar] [CrossRef]
- Geiger, A.; Ziegler, J.; Stiller, C. Stereoscan: Dense 3-d reconstruction in real-time. In Proceedings of the IEEE Intelligent Vehicles Symposium, Baden-Baden, Germany, 5–9 June 2011; IEEE: New York, NY, USA, 2011; Volume 2011, pp. 963–968. [Google Scholar] [CrossRef]
- Hoiem, D.; Efros, A.A.; Hebert, M. Geometric context from a single image. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Beijing, China, 17–21 October 2005; IEEE: New York, NY, USA, 2005; Volume 1. [Google Scholar] [CrossRef]
- Davison, A.J.; Reid, I.D.; Molton, N.D.; Stasse, O. MonoSLAM: Real-time single camera SLAM. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 1052–1067. [Google Scholar] [CrossRef]
- Mouragnon, E.; Lhuillier, M.; Dhome, M.; Dekeyser, F.; Sayd, P. Real time localization and 3-d reconstruction. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR), New York, NY, USA, 17–22 June 2006; IEEE: New York, NY, USA, 2006; Volume 1. [Google Scholar] [CrossRef]
- Koutsoudis, A.; Vidmar, B.; Ioannakis, G.; Arnaoutoglou, F.; Pavlidis, G.; Chamzas, C. Multi-image 3D reconstruction data evaluation. J. Cult. Herit. 2014, 15, 73–79. [Google Scholar] [CrossRef]
- Kolmogorov, V.; Zabih, R. Multi-camera scene reconstruction via graph cuts. In Proceedings of the Computer Vision—ECCV 2002, Part III 7: 7th European Conference on Computer Vision, Copenhagen, Denmark, 28–31 May 2002; Springer: Berlin/Heidelberg, Germany, 2002; pp. 82–96. [Google Scholar]
- Chen, M.; Tang, Y.; Zou, X.; Huang, K.; Li, L.; He, Y. High-accuracy multi-camera reconstruction enhanced by adaptive point cloud correction algorithm. Opt. Lasers Eng. 2019, 122, 170–183. [Google Scholar] [CrossRef]
- Olague, G.; Mohr, R. Optimal camera placement for accurate reconstruction. Pattern Recognit. 2002, 35, 927–944. [Google Scholar] [CrossRef]
- Rahimian, P.; Kearney, J.K. Optimal camera placement for motion capture systems in the presence of dynamic occlusion. In Proceedings of the 21st ACM Symposium on Virtual Reality Software and Technology, Beijing, China, 13–15 November 2015; pp. 129–138. [Google Scholar] [CrossRef]
- Erdem, U.M.; Sclaroff, S. Optimal placement of cameras in floorplans to satisfy task requirements and cost constraints. In Proceedings of the Fifth Workshop on Omnidirectional Vision, Camera Networks and Non-Classical Cameras, Prague, Czech Republic, 16 May 2004. [Google Scholar]
- Zhao, J.; Yoshida, R.; Cheung, S.S.; Haws, D. Approximate techniques in solving optimal camera placement problems. Int. J. Distrib. Sens. Netw. 2013, 9, 241913. [Google Scholar] [CrossRef]
- Chebi, H. Proposed and application of the Dragonfly algorithm for the camera placement problem. In Proceedings of the 9th International Conference on Sciences of Electronics, Technologies of Information and Telecommunications (SETIT), Hammamet, Tunisia, 28–30 May 2022; IEEE: New York, NY, USA, 2022; Volume 2022, pp. 503–509. [Google Scholar] [CrossRef]
- Fatlawi, A.; Vahedian, A.; Bachache, N.K. Optimal camera placement using sine-cosine algorithm. In Proceedings of the 8th International Conference on Computer and Knowledge Engineering (ICCKE), Mashhad, Iran, 25–26 October 2018; IEEE: New York, NY, USA, 2018; Volume 2018, pp. 115–119. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Candidates | Camera 1 | Camera 2 | Camera 3 | Total | |
|---|---|---|---|---|---|
| Camera | |||||
| Position_1 (Initial target position) | 72/132 (55%) | 44/132 (33%) | 16/132 (12%) | 132/132 (100%) | |
| Position_2 | 50/112 (45%) | 7/112 (6%) | 46/112 (41%) | 103/112 (92%) | |
| Position_3 | 47/105 (45%) | 12/105 (11%) | 22/105 (21%) | 81/105 (77%) | |
| Position_4 | 6/110 (5%) | 33/110 (30%) | 25/110 (23%) | 64/110 (58%) | |
| Position_5 | 7/100 (7%) | 59/100 (59%) | 0/100 (0%) | 66/100 (66%) | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, J.; Jo, D. Optimal Camera Placement to Generate 3D Reconstruction of a Mixed-Reality Human in Real Environments. Electronics 2023, 12, 4244. https://doi.org/10.3390/electronics12204244
Kim J, Jo D. Optimal Camera Placement to Generate 3D Reconstruction of a Mixed-Reality Human in Real Environments. Electronics. 2023; 12(20):4244. https://doi.org/10.3390/electronics12204244
Chicago/Turabian StyleKim, Juhwan, and Dongsik Jo. 2023. "Optimal Camera Placement to Generate 3D Reconstruction of a Mixed-Reality Human in Real Environments" Electronics 12, no. 20: 4244. https://doi.org/10.3390/electronics12204244