

Fault Diagnosis Strategy for a Standalone Photovoltaic System: A Residual Formation Approach
 , , , , and
, , , , and
Abstract
:1. Introduction
2. Mathematical Description of PV System
2.1. PV Cell Modeling
2.2. PV System Modeling
3. Problem Formulation
4. Design of the Fault Diagnosis Scheme
4.1. Nonlinear SMO Design
4.2. Residual Construction
4.3. Threshold Design
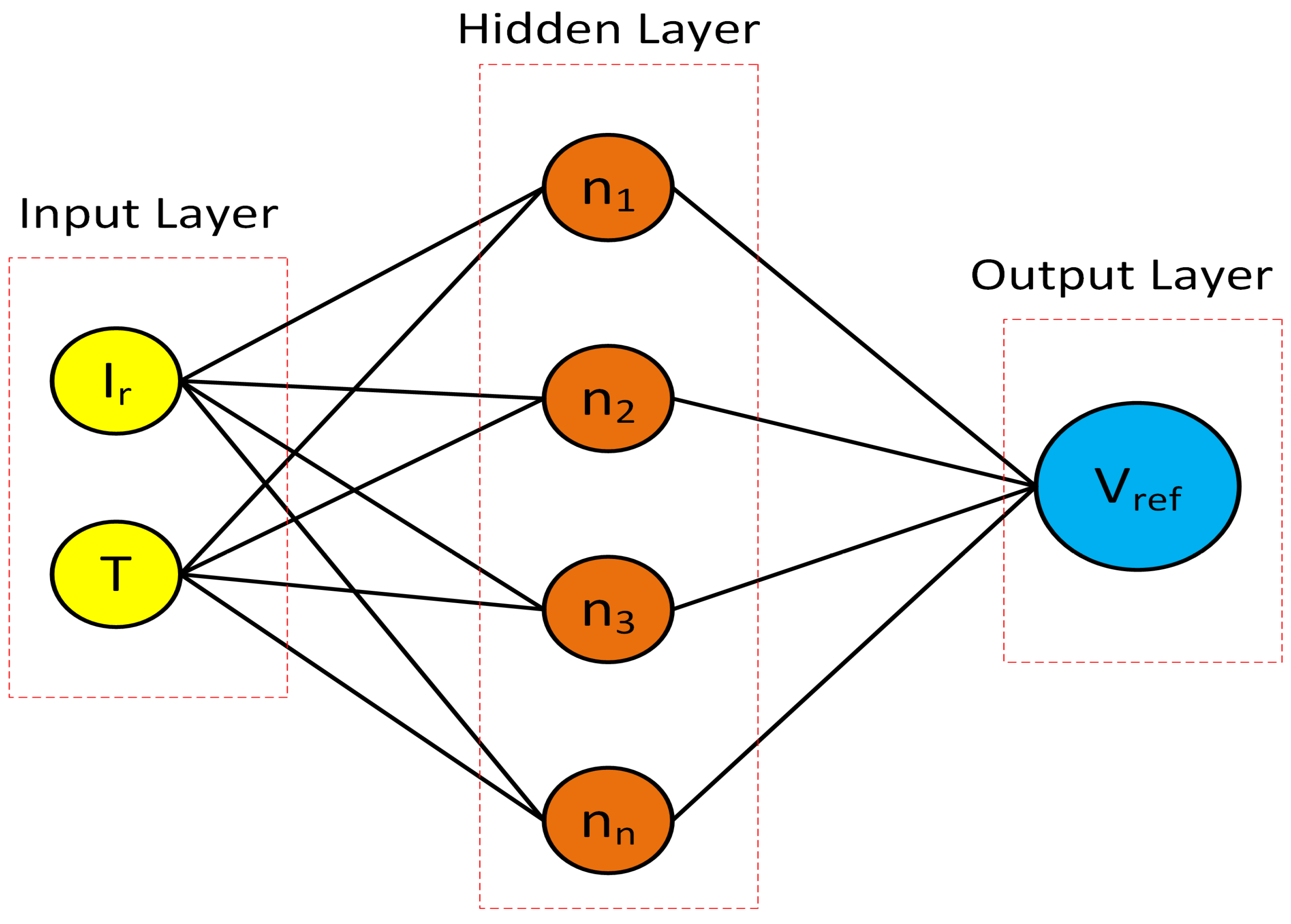
5. Formation of Reference Voltage
6. Simulation Results
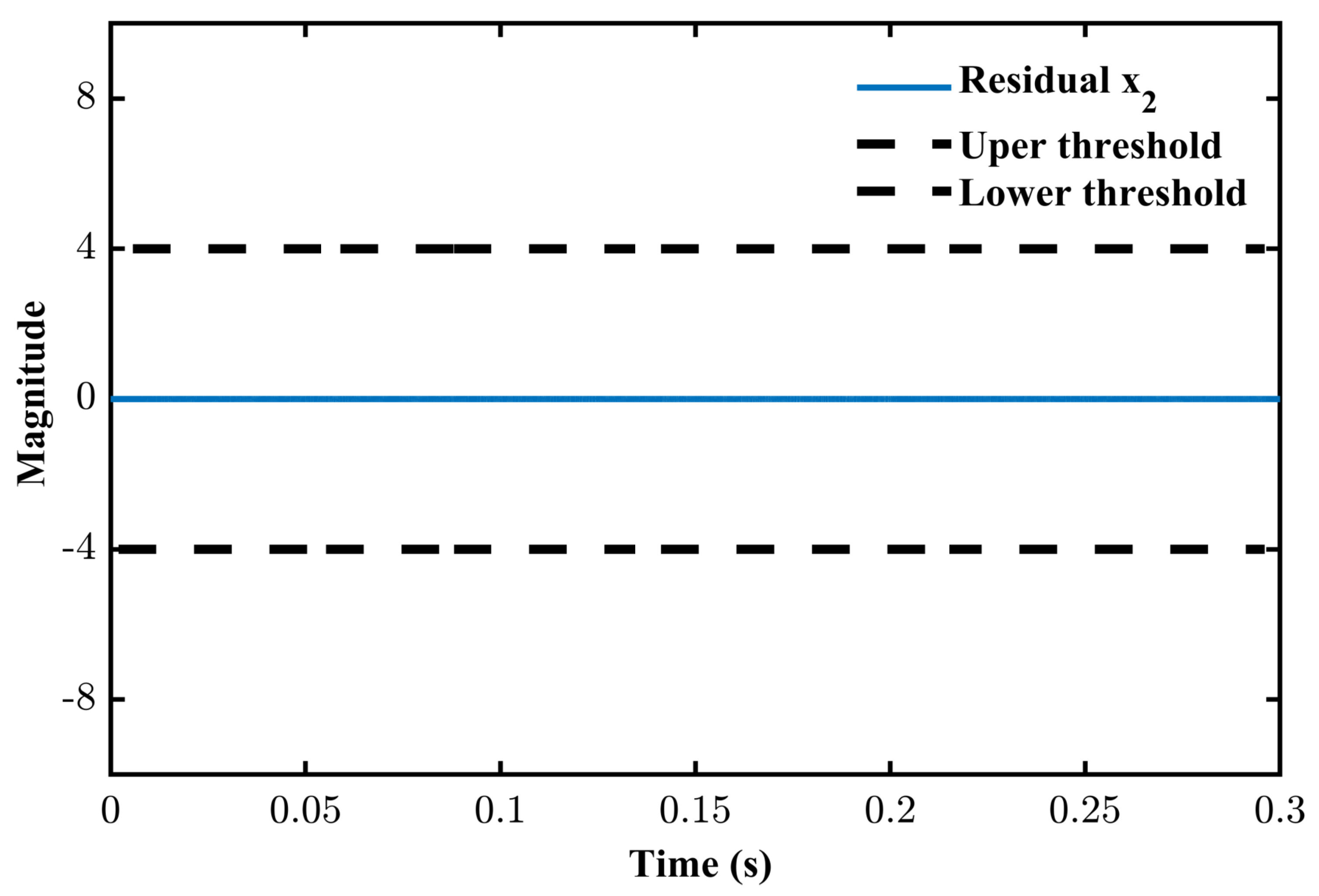
6.1. Performance under Varying Conditions in the Presence of Sensor Fault
6.2. Sensorless PV System
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| PV | Photovoltaic |
| SMO | Sliding mode observer |
| MPT | Maximum power transfer |
| SDGs | Strategic Development Goals |
| AR | Analytical redundancy |
| STA | Super-twisting algorithm |
| MPPT | Maximum power point tracking |
| FD | Fault diagnosis |
| FTC | Fault-tolerant control |
| BSC | Back-stepping controller |
| MR | Material redundancy |
| HOSM | Higher-order sliding mode |
| BBC | Buck–boost converter |
References
- Panwar, N.; Kaushik, S.; Kothari, S. Role of renewable energy sources in environmental protection: A review. Renew. Sustain. Energy Rev. 2011, 15, 1513–1524. [Google Scholar] [CrossRef]
- Khan, M.A.; Khan, Q.; Khan, L.; Khan, I.; Alahmadi, A.A.; Ullah, N. Robust Differentiator-Based NeuroFuzzy Sliding Mode Control Strategies for PMSG-WECS. Energies 2022, 15, 7039. [Google Scholar] [CrossRef]
- Zhao, Y.; Ball, R.; Mosesian, J.; de Palma, J.F.; Lehman, B. Graph-based semi-supervised learning for fault detection and classification in solar photovoltaic arrays. IEEE Trans. Power Electron. 2014, 30, 2848–2858. [Google Scholar] [CrossRef]
- Alam, Z.; Khan, L.; Khan, Q.; Ullah, S.; Ahmed, S.; Khan, M.A. Integrated Fault-Diagnoses and Fault-Tolerant MPPT Control Scheme for a Photovoltaic System. In Proceedings of the 2019 15th International Conference on Emerging Technologies (ICET), Peshawar, Pakistan, 2–3 December 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Garoudja, E.; Harrou, F.; Sun, Y.; Kara, K.; Chouder, A.; Silvestre, S. Statistical fault detection in photovoltaic systems. Sol. Energy 2017, 150, 485–499. [Google Scholar] [CrossRef]
- Davarifar, M.; Rabhi, A.; El Hajjaji, A. Comprehensive modulation and classification of faults and analysis their effect in DC side of photovoltaic system. Energy Power Eng. 2013, 5, 230. [Google Scholar] [CrossRef]
- Balfour, J.R.; Shaw, M. Introduction to Photovoltaic System Design; Jones & Bartlett Publishers: Sudbury, MA, USA, 2011; ISBN 9781449624682. [Google Scholar]
- Jamil, M.; Rizwan, M.; Kothari, D.P. Grid Integration of Solar Photovoltaic Systems; CRC Press: Boca Raton, FL, USA, 2017; ISBN 9781315156347. [Google Scholar] [CrossRef]
- Pillai, D.S.; Rajasekar, N. A comprehensive review on protection challenges and fault diagnosis in PV systems. Renew. Sustain. Energy Rev. 2018, 91, 18–40. [Google Scholar] [CrossRef]
- Mellit, A.; Tina, G.M.; Kalogirou, S.A. Fault detection and diagnosis methods for photovoltaic systems: A review. Renew. Sustain. Energy Rev. 2018, 91, 1–17. [Google Scholar] [CrossRef]
- Madeti, S.R.; Singh, S. A comprehensive study on different types of faults and detection techniques for solar photovoltaic system. Sol. Energy 2017, 158, 161–185. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, J.; Cheng, M.; Zheng, Y. Fault-tolerant control of paralleled-voltage-source-inverter-fed PMSM drives. IEEE Trans. Ind. Electron. 2015, 62, 4749–4760. [Google Scholar] [CrossRef]
- Salehifar, M.; Arashloo, R.S.; Moreno-Equilaz, J.M.; Sala, V.; Romeral, L. Fault detection and fault tolerant operation of a five phase PM motor drive using adaptive model identification approach. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 2, 212–223. [Google Scholar] [CrossRef]
- Berriri, H.; Naouar, M.W.; Slama-Belkhodja, I. Easy and fast sensor fault detection and isolation algorithm for electrical drives. IEEE Trans. Power Electron. 2011, 27, 490–499. [Google Scholar] [CrossRef]
- Varrier, S.; Koenig, D.; Martinez, J.J. A parity space-based fault detection on lpv systems: Approach for vehicle lateral dynamics control system. IFAC Proc. Vol. 2012, 45, 1191–1196. [Google Scholar] [CrossRef]
- Frank, P.M.; Ding, X. Survey of robust residual generation and evaluation methods in observer-based fault detection systems. J. Process. Control 1997, 7, 403–424. [Google Scholar] [CrossRef]
- Kinnaert, M. Robust fault detection based on observers for bilinear systems. Automatica 1999, 35, 1829–1842. [Google Scholar] [CrossRef]
- Shields, D. Observer-based residual generation for fault diagnosis for non-affine non-linear polynomial systems. Int. J. Control 2005, 78, 363–384. [Google Scholar] [CrossRef]
- Campos-Delgado, D.U.; Espinoza-Trejo, D.R. An observer-based diagnosis scheme for single and simultaneous open-switch faults in induction motor drives. IEEE Trans. Ind. Electron. 2010, 58, 671–679. [Google Scholar] [CrossRef]
- Jiang, W.; Dong, C.; Niu, E.; Wang, Q. Observer-based robust fault detection filter design and optimization for networked control systems. Math. Probl. Eng. 2015, 2015, 231749. [Google Scholar] [CrossRef] [Green Version]
- Poon, J.; Jain, P.; Konstantakopoulos, I.C.; Spanos, C.; Panda, S.K.; Sanders, S.R. Model-based fault detection and identification for switching power converters. IEEE Trans. Power Electron. 2016, 32, 1419–1430. [Google Scholar] [CrossRef]
- Rehman, A.U.; Khan, L.; Ali, N.; Alam, Z.; Khan, Z.A.; Khan, M.A. Soft Computing Technique based Nonlinear Sliding Mode Control for Stand-Alone Photovoltaic System. In Proceedings of the 2020 International Conference on Emerging Trends in Smart Technologies (ICETST), Karachi, Pakistan, 26–27 March 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Zorgani, Y.A.; Koubaa, Y.; Boussak, M. MRAS state estimator for speed sensorless ISFOC induction motor drives with Luenberger load torque estimation. ISA Trans. 2016, 61, 308–317. [Google Scholar] [CrossRef]
- Tabbache, B.; Benbouzid, M.E.H.; Kheloui, A.; Bourgeot, J.M. Virtual-sensor-based maximum-likelihood voting approach for fault-tolerant control of electric vehicle powertrains. IEEE Trans. Veh. Technol. 2012, 62, 1075–1083. [Google Scholar] [CrossRef] [Green Version]
- Khan, M.A.; Ullah, S.; Khan, L.; Khan, Q.; Khan, Z.A.; Zaman, H.; Ahmad, S. Observer Based Higher Order Sliding Mode Control Scheme for PMSG-WECS. In Proceedings of the 2019 15th International Conference on Emerging Technologies (ICET), Peshawar, Pakistan, 2–3 December 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Khan, R.; Khan, L.; Ullah, S.; Sami, I.; Ro, J.S. Backstepping based super-twisting sliding mode MPPT control with differential flatness oriented observer design for photovoltaic system. Electronics 2020, 9, 1543. [Google Scholar] [CrossRef]
- Luenberger, D. An introduction to observers. IEEE Trans. Autom. Control 1971, 16, 596–602. [Google Scholar] [CrossRef]
- Afri, C.; Andrieu, V.; Bako, L.; Dufour, P. State and parameter estimation: A nonlinear Luenberger observer approach. IEEE Trans. Autom. Control 2016, 62, 973–980. [Google Scholar] [CrossRef] [Green Version]
- Apaza-Perez, W.A.; Moreno, J.A.; Fridman, L.M. Dissipative approach to sliding mode observers design for uncertain mechanical systems. Automatica 2018, 87, 330–336. [Google Scholar] [CrossRef]
- Iqbal, M.; Bhatti, A.I.; Ayubi, S.I.; Khan, Q. Robust parameter estimation of nonlinear systems using sliding-mode differentiator observer. IEEE Trans. Ind. Electron. 2010, 58, 680–689. [Google Scholar] [CrossRef]
- Park, H.; Kim, H. PV cell modeling on single-diode equivalent circuit. In Proceedings of the IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 1845–1849. [Google Scholar] [CrossRef]
- Yaqoob, S.J.; Motahhir, S.; Agyekum, E.B. A new model for a photovoltaic panel using Proteus software tool under arbitrary environmental conditions. J. Clean. Prod. 2022, 333, 130074. [Google Scholar] [CrossRef]
- Yaqoob, S.J.; Saleh, A.L.; Motahhir, S.; Agyekum, E.B.; Nayyar, A.; Qureshi, B. Comparative study with practical validation of photovoltaic monocrystalline module for single and double diode models. Sci. Rep. 2021, 11, 19153. [Google Scholar] [CrossRef]
- Armghan, H.; Ahmad, I.; Armghan, A.; Khan, S.; Arsalan, M. Backstepping based non-linear control for maximum power point tracking in photovoltaic system. Sol. Energy 2018, 159, 134–141. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbol | Value |
|---|---|---|
| Total modules in PV array | 16 | |
| Number of modules connected in series | 4 | |
| Number of modules connected in parallel | 4 | |
| Number of cells per modules | 72 | |
| Voltage at open circuit | V | |
| Current at short circuit | A | |
| Voltage at maximum power | V | |
| Current at maximum power | A | |
| Maximum power | W | |
| Input capacitor | F | |
| Inductor | L | H |
| S.NO. | Symbol | Value |
|---|---|---|
| 1 | 100 | |
| 2 | 9000 | |
| 3 | 10 | |
| 4 | 10 | |
| 5 | 10 | |
| 6 | 10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alam, Z.; Khan, M.A.; Khan, Z.A.; Ahmad, W.; Khan, I.; Khan, Q.; Irfan, M.; Nowakowski, G. Fault Diagnosis Strategy for a Standalone Photovoltaic System: A Residual Formation Approach. Electronics 2023, 12, 282. https://doi.org/10.3390/electronics12020282
Alam Z, Khan MA, Khan ZA, Ahmad W, Khan I, Khan Q, Irfan M, Nowakowski G. Fault Diagnosis Strategy for a Standalone Photovoltaic System: A Residual Formation Approach. Electronics. 2023; 12(2):282. https://doi.org/10.3390/electronics12020282
Chicago/Turabian StyleAlam, Zaheer, Malak Adnan Khan, Zain Ahmad Khan, Waleed Ahmad, Imran Khan, Qudrat Khan, Muhammad Irfan, and Grzegorz Nowakowski. 2023. "Fault Diagnosis Strategy for a Standalone Photovoltaic System: A Residual Formation Approach" Electronics 12, no. 2: 282. https://doi.org/10.3390/electronics12020282