
Information Fusion for 5G IoT: An Improved 3D Localisation Approach Using K-DNN and Multi-Layered Hybrid Radiomap

 ,
, 
Abstract
:1. Introduction
- A realistic information fusion scenario for 5G IoT networks was planned and deployed utilizing a 5G IoT gateway, a Bluetooth Low Energy (BLE) network, and a set of wireless IoT access points without requiring any extra information such as a magnetic-inductive sensor, acoustics, visible light, or a powerline.
- Our implementation used a novel data-augmentation concept for a received signal strength (RSS)-based fingerprint technique to produce a 3D fused hybrid fingerprint. This concept was supported by the interquartile range (IQR) method for the detection and elimination of outliers.
- To improve 3D positioning accuracy, a K-DNN cooperative algorithm was implemented on the constructed hybrid multi-layered radiomap.
2. State of the Art
2.1. Received Signal Strength
2.2. RSS Fingerprint-Based 2D and 3D Indoor Positioning
2.3. Information Fusion for 5G IoT
BLE Technology
2.4. Machine Learning
2.4.1. Probabilistic Approach
2.4.2. Deterministic Approach
2.4.3. Deep Learning
3. The Proposed Approach
3.1. K-DNN Architecture and Hybrid 3D Localisation for 5G IoT
3.2. K-DNN Model Architecture
3.2.1. KNN
3.2.2. DNN
3.3. K-DNN Psuedocode
| Algorithm 1: K-DNN Algorithm for 3D Localisation |
 |
4. 5G IoT Physical Network Environment
4.1. 5G Core Network
4.2. eNodeB (4G)/gNodeB (5G)
4.3. 5G IoT Modem
4.4. Wireless Local Area Networks
4.5. Bluetooth Low Energy
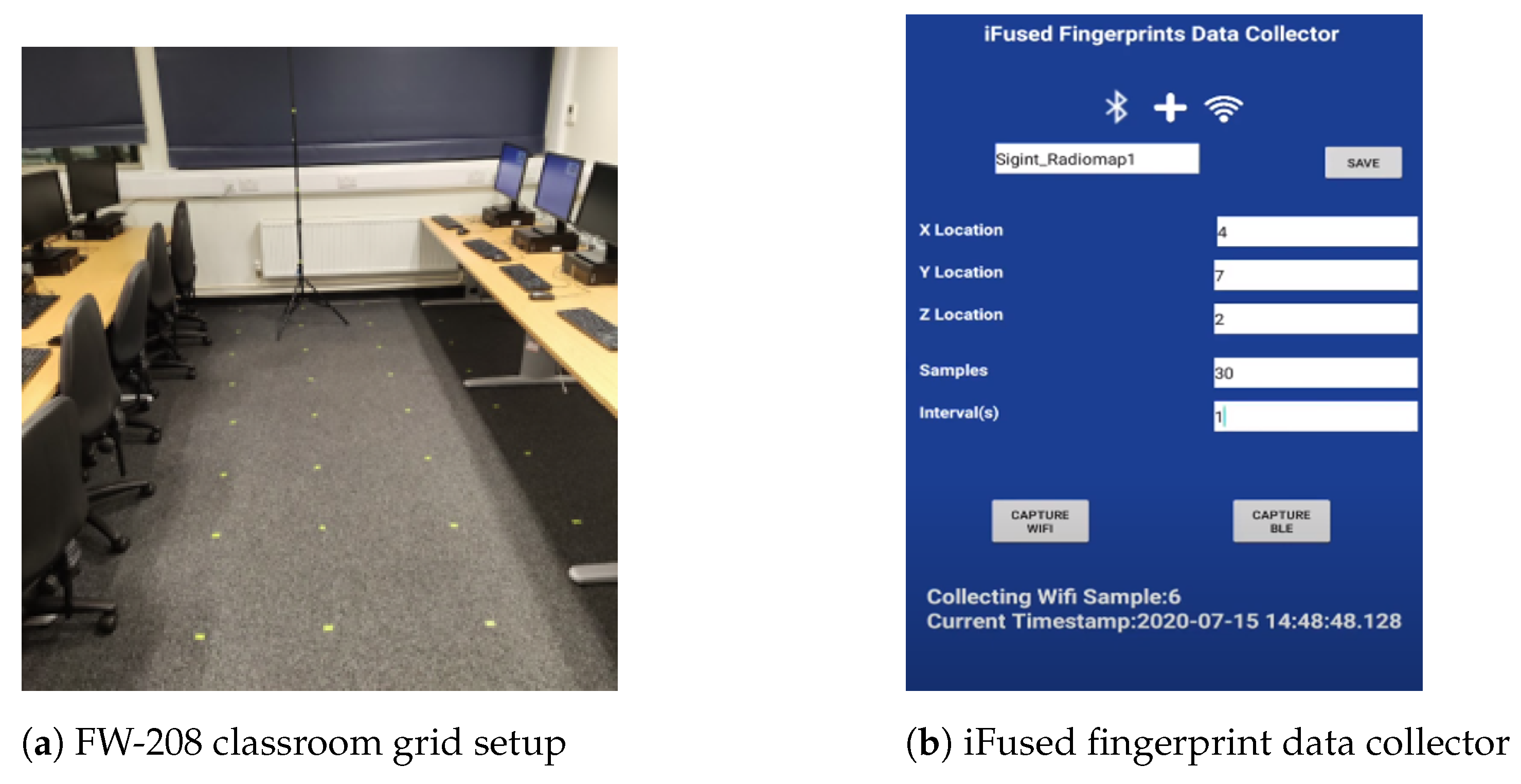
5. Test Environment
5.1. Radiomap from Actual 5G IoT Measurements
5.2. 5G IoT Simulated Radiomap
5.2.1. TruNet Tool
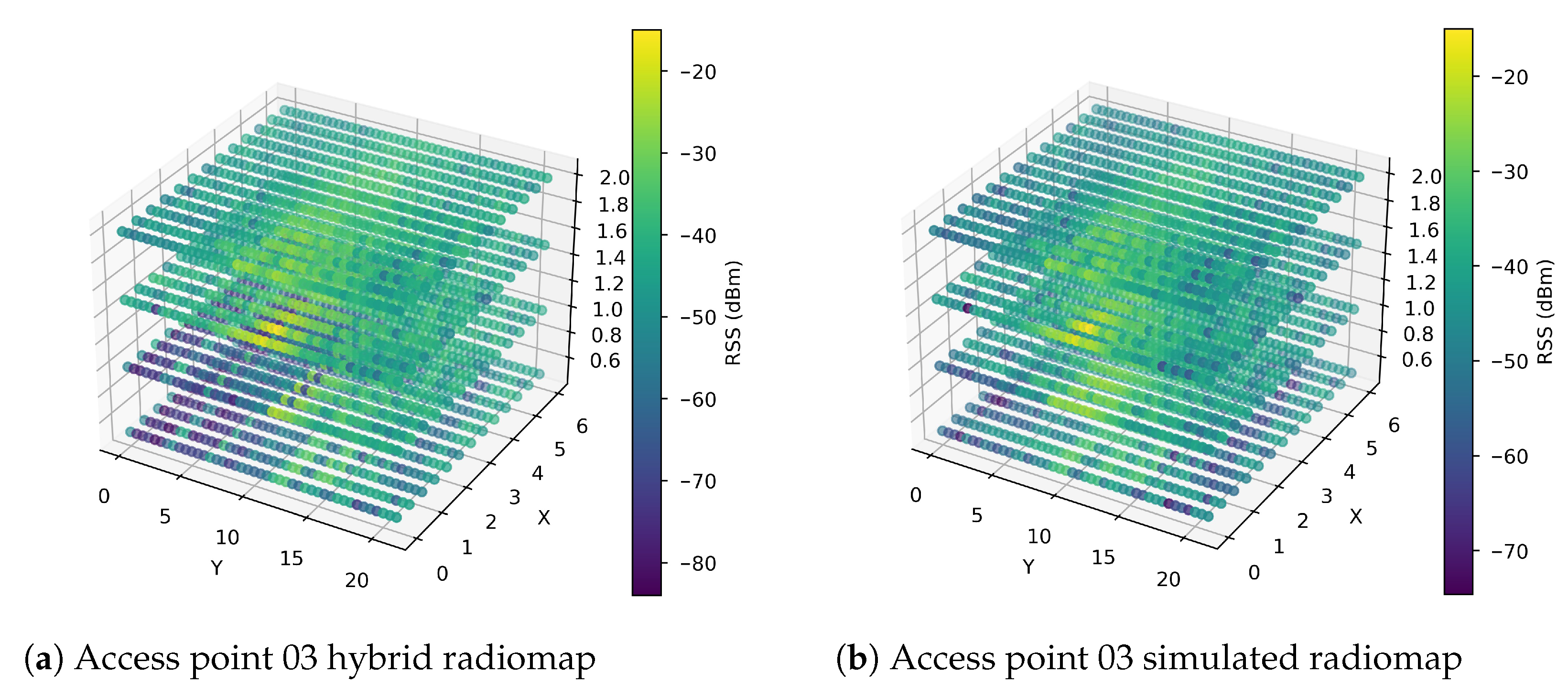
5.2.2. Simulated Radiomap
5.2.3. The physical Network Behaviour
5.3. Preprocessing
5.3.1. Multi-Layered Radiomap Hybridisation
5.3.2. Feature Selection
5.3.3. Outlier Elimination
5.3.4. Data Normalisation
5.3.5. One-Hot Encoding
| Algorithm 2: One-Hot Encoding |
 |
6. Performance Evaluation
7. Results Analysis
7.1. DNN Scoring
- Model 1: hybrid radiomap (proposed approach).
- Model 2: hybrid radiomap without information fusion.
- Model 3: simulated radiomap.
- Model 4: simulated radiomap without information fusion.
7.2. KNN Scoring
- KNN 1: hybrid radiomap with information fusion.
- KNN 2: hybrid radiomap without information fusion.
- KNN 3: simulated radiomap with information fusion.
- KNN 4: simulated radiomap without information fusion.
8. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ge, Y.; Wen, F.; Kim, H.; Zhu, M.; Jiang, F.; Kim, S.; Svensson, L.; Wymeersch, H. 5G SLAM using the clustering and assignment approach with diffuse multipath. Sensors 2020, 20, 4656. [Google Scholar] [CrossRef]
- Walia, J.S.; Hämmäinen, H.; Kilkki, K.; Yrjölä, S. 5G network slicing strategies for a smart factory. Comput. Ind. 2019, 111, 108–120. [Google Scholar] [CrossRef]
- Li, G.; Lian, W.; Qu, H.; Li, Z.; Zhou, Q.; Tian, J. Improving patient care through the development of a 5G-powered smart hospital. Nat. Med. 2021, 27, 936–937. [Google Scholar] [CrossRef] [PubMed]
- Khan, S.K.; Naseem, U.; Siraj, H.; Razzak, I.; Imran, M. The role of unmanned aerial vehicles and mmWave in 5G: Recent advances and challenges. Trans. Emerg. Telecommun. Technol. 2021, 32, e4241. [Google Scholar] [CrossRef]
- Cisco. Cisco Annual Internet Report-Cisco Annual Internet Report (2018–2023) White Paper—Cisco. Available online: https://www.cisco.com/c/en/us/solutions/collateral/executive-perspectives/annual-internet-report/white-paper-c11-741490.html. (accessed on 10 February 2022).
- Norris, P. Satellite Programs in the USA 59. In Handbook of Space Security; Springer: Berlin/Heidelberg, Germany, 2020; p. 1133. [Google Scholar]
- 3GPP. TR-2 2.872: Study on Positioning Use Cases; Tech. Report 16; ETSI: Sophia Antipolis, France, 2018. [Google Scholar]
- Wymeersch, H.; Seco-Granados, G.; Destino, G.; Dardari, D.; Tufvesson, F. 5G mmWave positioning for vehicular networks. IEEE Wirel. Commun. 2017, 24, 80–86. [Google Scholar] [CrossRef]
- Leonardo, L.; Yuhei, N.; Kurosaki, M.; Ochi, H. High Precision Localization Protocol with Diversity for 802.11 az. IEICE Tech. Rep. IEICE Tech. Rep. 2017, 117, 69–74. [Google Scholar]
- Alsinglawi, B.; Elkhodr, M.; Nguyen, Q.V.; Gunawardana, U.; Maeder, A.; Simoff, S. RFID localisation for Internet of Things smart homes: A survey. arXiv 2017, arXiv:1702.02311. [Google Scholar] [CrossRef]
- Deak, G.; Curran, K.; Condell, J. A survey of active and passive indoor localisation systems. Comput. Commun. 2012, 35, 1939–1954. [Google Scholar] [CrossRef]
- Yassin, A.; Nasser, Y.; Awad, M.; Al-Dubai, A.; Liu, R.; Yuen, C.; Raulefs, R.; Aboutanios, E. Recent advances in indoor localization: A survey on theoretical approaches and applications. IEEE Commun. Surv. Tutor. 2016, 19, 1327–1346. [Google Scholar] [CrossRef]
- El Boudani, B.; Kanaris, L.; Kokkinis, A.; Kyriacou, M.; Chrysoulas, C.; Stavrou, S.; Dagiuklas, T. Implementing deep learning techniques in 5G IoT networks for 3D indoor positioning: DELTA (DeEp Learning-Based Co-operaTive Architecture). Sensors 2020, 20, 5495. [Google Scholar] [CrossRef]
- Kanaris, L.; Kokkinis, A.; Liotta, A.; Stavrou, S. Fusing bluetooth beacon data with Wi-Fi radiomaps for improved indoor localization. Sensors 2017, 17, 812. [Google Scholar] [CrossRef] [PubMed]
- Guerra, A.; Guidi, F.; Dardari, D. Single-anchor localization and orientation performance limits using massive arrays: MIMO vs. beamforming. IEEE Trans. Wirel. Commun. 2018, 17, 5241–5255. [Google Scholar] [CrossRef]
- Liu, Y.; Shi, X.; He, S.; Shi, Z. Prospective positioning architecture and technologies in 5G networks. IEEE Netw. 2017, 31, 115–121. [Google Scholar] [CrossRef]
- Horsmanheimo, S.; Lembo, S.; Tuomimaki, L.; Huilla, S.; Honkamaa, P.; Laukkanen, M.; Kemppi, P. Indoor positioning platform to support 5G location based services. In Proceedings of the 2019 IEEE International Conference on Communications Workshops (ICC Workshops), Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar]
- Wang, G.; Chen, H.; Li, Y.; Jin, M. On received-signal-strength based localization with unknown transmit power and path loss exponent. IEEE Wirel. Commun. Lett. 2012, 1, 536–539. [Google Scholar] [CrossRef]
- Huang, J.; Liu, P.; Lin, W.; Gui, G. RSS-based method for sensor localization with unknown transmit power and uncertainty in path loss exponent. Sensors 2016, 16, 1452. [Google Scholar] [CrossRef] [PubMed]
- Coluccia, A.; Ricciato, F. On ML estimation for automatic RSS-based indoor localization. In Proceedings of the IEEE 5th International Symposium on Wireless Pervasive Computing 2010, Modena, Italy, 5–7 May 2010; pp. 495–502. [Google Scholar]
- Zhang, Y.; Xing, S.; Zhu, Y.; Yan, F.; Shen, L. RSS-based localization in WSNs using Gaussian mixture model via semidefinite relaxation. IEEE Commun. Lett. 2017, 21, 1329–1332. [Google Scholar] [CrossRef]
- Tsui, A.W.T.; Lin, W.C.; Chen, W.J.; Huang, P.; Chu, H.H. Accuracy performance analysis between war driving and war walking in metropolitan Wi-Fi localization. IEEE Trans. Mob. Comput. 2010, 9, 1551–1562. [Google Scholar] [CrossRef]
- Huang, S.; Zhao, K.; Zheng, Z.; Ji, W.; Li, T.; Liao, X. An optimized fingerprinting-based indoor positioning with Kalman filter and universal kriging for 5G internet of things. Wirel. Commun. Mob. Comput. 2021, 2021, 9936706. [Google Scholar] [CrossRef]
- Gong, Y.; Zhang, L. Improved K-nearest neighbor algorithm for indoor positioning using 5G channel state information. In Proceedings of the 2021 IEEE 5th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Xi’an, China, 15–17 October 2021; Volume 5, pp. 333–337. [Google Scholar]
- Mogyorósi, F.; Revisnyei, P.; Pašić, A.; Papp, Z.; Törös, I.; Varga, P.; Pašić, A. Positioning in 5G and 6G Networks & mdash—A Survey. Sensors 2022, 22, 4757. [Google Scholar] [CrossRef]
- Farahsari, P.S.; Farahzadi, A.; Rezazadeh, J.; Bagheri, A. A Survey on Indoor Positioning Systems for IoT-Based Applications. IEEE Internet Things J. 2022, 9, 7680–7699. [Google Scholar] [CrossRef]
- He, S.; Shin, H.S.; Xu, S.; Tsourdos, A. Distributed estimation over a low-cost sensor network: A review of state-of-the-art. Inf. Fusion 2020, 54, 21–43. [Google Scholar] [CrossRef]
- Aoughlis, S.; Saddaoui, R.; Achour, B.; Laghrouche, M. Dairy cows’ localisation and feeding behaviour monitoring using a combination of IMU and RFID network. Int. J. Sens. Netw. 2021, 37, 23–35. [Google Scholar] [CrossRef]
- Aikawa, S.; Yamamoto, S.; Morimoto, M. WLAN finger print localization using deep learning. In Proceedings of the 2018 IEEE Asia-Pacific Conference on Antennas and Propagation (APCAP), Auckland, New Zealand, 5–8 August 2018; pp. 541–542. [Google Scholar]
- Hilsenbeck, S.; Bobkov, D.; Schroth, G.; Huitl, R.; Steinbach, E. Graph-based data fusion of pedometer and WiFi measurements for mobile indoor positioning. In Proceedings of the 2014 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Seattle, WA, USA, 13–17 September 2014; pp. 147–158. [Google Scholar]
- Kanaris, L.; Kokkinis, A.; Liotta, A.; Stavrou, S. Combining smart lighting and radio fingerprinting for improved indoor localization. In Proceedings of the 2017 IEEE 14th International Conference on Networking, Sensing and Control (ICNSC), Calabria, Italy, 16–18 May 2017; pp. 447–452. [Google Scholar]
- Klus, R.; Talvitie, J.; Valkama, M. Neural network fingerprinting and GNSS data fusion for improved localization in 5G. In Proceedings of the 2021 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 1–3 June 2021; pp. 1–6. [Google Scholar]
- Álvarez-Merino, C.S.; Luo-Chen, H.Q.; Khatib, E.J.; Barco, R. WiFi FTM, UWB and cellular-based radio fusion for indoor positioning. Sensors 2021, 21, 7020. [Google Scholar] [CrossRef] [PubMed]
- Abu-Mahfouz, A.M.; Hancke, G.P. Localised information fusion techniques for location discovery in wireless sensor networks. Int. J. Sens. Netw. 2018, 26, 12–25. [Google Scholar] [CrossRef]
- Zhang, Y.; Jiang, C.; Yue, B.; Wan, J.; Guizani, M. Information fusion for edge intelligence: A survey. Inf. Fusion 2022, 81, 171–186. [Google Scholar] [CrossRef]
- Zhuang, Y.; Sun, X.; Li, Y.; Huai, J.; Hua, L.; Yang, X.; Cao, X.; Zhang, P.; Cao, Y.; Qi, L.; et al. Multi-sensor integrated navigation/positioning systems using data fusion: From analytics-based to learning-based approaches. Inf. Fusion 2023, 95, 62–90. [Google Scholar] [CrossRef]
- Ji, T.; Li, W.; Zhu, X.; Liu, M. Survey on indoor fingerprint localization for BLE. In Proceedings of the 2022 IEEE 6th Information Technology and Mechatronics Engineering Conference (ITOEC), Chongqing, China, 4–6 March 2022; Volume 6, pp. 129–134. [Google Scholar]
- Shan, G.; Choi, G.; Roh, B.H.; Kang, J. An Improved Neighbor Discovery Process in BLE 5.0. In Proceedings of the 2019 IEEE 10th Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 17–19 October 2019; pp. 0809–0812. [Google Scholar]
- Core Specification 5.0–Bluetooth® Technology Website. Available online: https://www.bluetooth.com/specifications/specs/core-specification-5/ (accessed on 10 May 2022).
- Kanakaraja, P.; Kotamraju, S.K.; Nadipalli, L.S.P.S.; Aswin Kume, S.W. IoT enabled BLE and LoRa based indoor localization without GPS. Turk. J. Comput. Math. Educ. (TURCOMAT) 2021, 12, 1637–1651. [Google Scholar]
- Kolakowski, J.; Djaja-Josko, V.; Kolakowski, M.; Broczek, K. UWB/BLE tracking system for elderly people monitoring. Sensors 2020, 20, 1574. [Google Scholar] [CrossRef]
- Cheong, P.; Rabbachin, A.; Montillet, J.P.; Yu, K.; Oppermann, I. Synchronization, TOA and position estimation for low-complexity LDR UWB devices. In Proceedings of the 2005 IEEE International Conference on Ultra-Wideband, Zurich, Switzerland, 5–8 September 2005; pp. 480–484. [Google Scholar]
- Hu, Q.; Yang, J.; Qin, P.; Fong, S.; Guo, J. Could or could not of Grid-Loc: Grid BLE structure for indoor localisation system using machine learning. Serv. Oriented Comput. Appl. 2020, 14, 161–174. [Google Scholar] [CrossRef]
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the Proceedings IEEE INFOCOM 2000. Conference on Computer Communications. NINETEENTH Annual Joint Conference of the IEEE Computer and Communications Societies (Cat. No. 00CH37064), Tel Aviv, Israel, 26–30 March 2000; Volume 2, pp. 775–784. [Google Scholar]
- Yeung, W.M.; Zhou, J.; Ng, J.K. Enhanced fingerprint-based location estimation system in wireless LAN environment. In Emerging Directions in Embedded and Ubiquitous Computing, Proceedings of the EUC 2007 Workshops: TRUST, WSOC, NCUS, UUWSN, USN, ESO, and SECUBIQ, Taipei, Taiwan, 17–20 December 2007; Springer: Berlin/Heidelberg, Germany, 2007; pp. 273–284. [Google Scholar]
- Li, B. Indoor positioning techniques based on wireless LAN. In Proceedings of the 1st IEEE International Conference on Wireless Broadband & Ultra Wideband Communications, Budapest, Hungary, 10–15 July 2005. [Google Scholar]
- Saha, S.; Chaudhuri, K.; Sanghi, D.; Bhagwat, P. Location determination of a mobile device using IEEE 802.11 b access point signals. In Proceedings of the 2003 IEEE Wireless Communications and Networking, 2003. WCNC 2003, New Orleans, LA, USA, 16-20 March 2003; Volume 3, pp. 1987–1992. [Google Scholar]
- Honkavirta, V.; Perala, T.; Ali-Loytty, S.; Piche, R. A comparative survey of WLAN location fingerprinting methods. In Proceedings of the 2009 6th Workshop on Positioning, Navigation and Communication, Hannover, Germany, 19 March 2009; pp. 243–251. [Google Scholar] [CrossRef]
- Yousaf, J.; Zia, H.; Alhalabi, M.; Yaghi, M.; Basmaji, T.; Shehhi, E.A.; Gad, A.; Alkhedher, M.; Ghazal, M. Drone and Controller Detection and Localization: Trends and Challenges. Appl. Sci. 2022, 12, 12612. [Google Scholar] [CrossRef]
- Xu, L.; Yao, S.; Rao, S.; Hu, Q.; Liu, C.; Zhu, H. Indoor Positioning Based on Enhanced 5G Fingerprint Positioning Algorithm. In Signal and Information Processing, Networking and Computers, Proceedings of the International Conference on Signal and Information Processing, Networking and Computers; Springer: Berlin/Heidelberg, Germany, 2022; pp. 1179–1184. [Google Scholar]
- Ruan, Y.; Chen, L.; Zhou, X.; Liu, Z.; Liu, X.; Guo, G.; Chen, R. iPos-5G: Indoor positioning via commercial 5G NR CSI. IEEE Internet Things J. 2022, 10, 8718–8733. [Google Scholar] [CrossRef]
- Gao, X.; He, D.; Wang, P.; Zhou, Z.; Xiao, Z.; Arai, S. One-Reflection Path Assisted Fingerprint Localization Method with Single Base Station under 6G Indoor Environment. In Proceedings of the 2023 IEEE International Symposium on Circuits and Systems (ISCAS), Monterey, CA, USA, 21–25 May 2023; pp. 1–5. [Google Scholar]
- Rathnayake, R.; Maduranga, M.W.P.; Tilwari, V.; Dissanayake, M.B. RSSI and Machine Learning-Based Indoor Localization Systems for Smart Cities. Eng 2023, 4, 1468–1494. [Google Scholar] [CrossRef]
- Liu, W.; Chen, J. UAV-aided Radio Map Construction Exploiting Environment Semantics. IEEE Trans. Wirel. Commun. 2023, 22, 6341–6355. [Google Scholar] [CrossRef]
- Yang, L.; Chen, H.; Cui, Q.; Fu, X.; Zhang, Y. Probabilistic-KNN: A novel algorithm for passive indoor-localization scenario. In Proceedings of the 2015 IEEE 81st Vehicular Technology Conference (VTC Spring), Glasgow, UK, 11–14 May 2015; pp. 1–5. [Google Scholar]
- Kemppi, P.; Nousiainen, S. Database correlation method for multi-system positioning. In Proceedings of the 2006 IEEE 63rd Vehicular Technology Conference, Melbourne, VIC, Australia, 7–10 May 2006; Volume 2, pp. 866–870. [Google Scholar]
- Nuno-Barrau, G.; Páez-Borrallo, J.M. A new location estimation system for wireless networks based on linear discriminant functions and hidden Markov models. EURASIP J. Adv. Signal Process. 2006, 2006, 1–17. [Google Scholar] [CrossRef]
- Wu, Q.; Liu, H.; Zhang, C.; Fan, Q.; Li, Z.; Wang, K. Trajectory protection schemes based on a gravity mobility model in IoT. Electronics 2019, 8, 148. [Google Scholar] [CrossRef]
- Deng, L.; Yu, D. Deep learning: Methods and applications. Found. Trends® Signal Process. 2014, 7, 197–387. [Google Scholar] [CrossRef]
- Burghal, D.; Ravi, A.T.; Rao, V.; Alghafis, A.A.; Molisch, A.F. A comprehensive survey of machine learning based localization with wireless signals. arXiv 2020, arXiv:2012.11171. [Google Scholar]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436. [Google Scholar] [CrossRef]
- Teo, M.I.; Seow, C.K.; Wen, K. 5G Radar and Wi-Fi Based Machine Learning on Drone Detection and Localization. In Proceedings of the 2021 IEEE 6th International Conference on Computer and Communication Systems (ICCCS), Chengdu, China, 23–26 April 2021; pp. 875–880. [Google Scholar]
- Al-Tahmeesschi, A.; Talvitie, J.; López-Benítez, M.; Ruotsalainen, L. Deep Learning-based Fingerprinting for Outdoor UE Positioning Utilising Spatially Correlated RSSs of 5G Networks. In Proceedings of the 2022 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 7–9 June 2022; pp. 1–7. [Google Scholar]
- Njima, W.; Ahriz, I.; Zayani, R.; Terre, M.; Bouallegue, R. Deep CNN for Indoor Localization in IoT-Sensor Systems. Sensors 2019, 19, 3127. [Google Scholar] [CrossRef]
- Yang, S.; Sun, C.; Kim, Y. Indoor 3D localization scheme based on BLE signal fingerprinting and 1D convolutional neural network. Electronics 2021, 10, 1758. [Google Scholar] [CrossRef]
- Walfish, S. A review of statistical outlier methods. Pharm. Technol. 2006, 30, 82. [Google Scholar]
- Fix, E.; Hodges, J.L. Discriminatory analysis. Nonparametric Discrim. Small Sample Perform. Rep. A 1951, 193008, 238–247. [Google Scholar]
- Cover, T.; Hart, P. Nearest neighbor pattern classification. IEEE Trans. Inf. Theory 1967, 13, 21–27. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA; London, UK, 2016. [Google Scholar]
- 3GPP. Release 15. 2018. Available online: https://www.3gpp.org/release-15 (accessed on 10 August 2021).
- 3GPP. Release 16. 2020. Available online: https://www.3gpp.org/release-16 (accessed on 10 August 2021).
- Open5GS. Open5GS|Open Source Project of 5GC and EPC (Release-16). 2020. Available online: https://open5gs.org/ (accessed on 10 August 2021).
- Alliance, G.S. OpenAirInterface—5G Software Alliance for Democratising Wireless Innovation. 2020. Available online: https://openairinterface.org/ (accessed on 10 August 2021).
- free5GC. free5GC 5G Project. 2020. Available online: https://www.free5gc.org/ (accessed on 10 August 2021).
- Kim, M.; Park, K.; Park, J.; Kim, Y.; Lee, J.; Moon, D. Analysis of Current 5G Open-Source Projects. Electron. Telecommun. Trends 2021, 36, 83–92. [Google Scholar]
- Quectel. 5G RM500Q-GL|Quectel. 2020. Available online: https://www.tekmodul.de/wp-content/uploads/2020/05/Quectel_RM500Q-GL_5G_Specification_V1.0_Preliminary_20200313.pdf (accessed on 3 November 2022).
- Alliance, W. Wi-Fi CERTIFIED ac|Wi-Fi Alliance—wi-fi.org. Available online: https://www.wi-fi.org/discover-wi-fi/wi-fi-certified-ac (accessed on 7 August 2023).
- SIG, B. Bluetooth® Core Specification Version 5.0 Feature Enhancements|Bluetooth® Technology Website—bluetooth.com. Available online: https://www.bluetooth.com/bluetooth-resources/bluetooth-5-go-faster-go-further/ (accessed on 8 August 2023).
- Fractal Networx Limited. TruNET Wireless. 2017. Available online: www.fractalnetworx.com (accessed on 10 July 2023).
- Raspopoulos, M.; Laoudias, C.; Kanaris, L.; Kokkinis, A.; Panayiotou, C.G.; Stavrou, S. 3D Ray Tracing for device-independent fingerprint-based positioning in WLANs. In Proceedings of the 2012 9th Workshop on Positioning, Navigation and Communication, Dresden, Germany, 15–16 March 2012; pp. 109–113. [Google Scholar]
- Jemai, J.; Piesiewicz, R.; Kurner, T. Calibration of an indoor radio propagation prediction model at 2.4 GHz by measurements of the IEEE 802.11 b preamble. In Proceedings of the 2005 IEEE 61st Vehicular Technology Conference, Stockholm, Sweden, 30 May–1 June 2005; Volume 1, pp. 111–115. [Google Scholar]
- Upton, G.; Cook, I. Understanding Statistics; Oxford University Press: Oxford, UK, 1996. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Bholowalia, P.; Kumar, A. EBK-means: A clustering technique based on elbow method and k-means in WSN. Int. J. Comput. Appl. 2014, 105, 17–24. [Google Scholar] [CrossRef]
- Kanaris, L.; Kokkinis, A.; Fortino, G.; Liotta, A.; Stavrou, S. Sample Size Determination Algorithm for fingerprint-based indoor localization systems. Comput. Netw. 2016, 101, 169–177. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | X | Y | Z | Antenna Orientation |
|---|---|---|---|---|
| AP1 | 0 | 0 | 2 | Vertical |
| AP2 | 6 | 6.5 | 1.5 | Horizontal |
| AP3 | 0 | 11 | 1.5 | Vertical |
| AP4 | 0 | 13 | 1 | Horizontal |
| AP5 | 3 | 15 | 0.5 | Horizontal |
| BLE01 | 4 | 0 | 1 | N/A |
| BLE02 | 1 | 9 | 1.5 | N/A |
| BLE03 | 6 | 13 | 2 | N/A |
| BLE04 | 3 | 21 | 0.5 | N/A |
| Parameter | BLE | WLAN |
|---|---|---|
| Rx sensitivity (dBm) | −70 | −120 |
| Tx power (dBm) | 8 | 12 |
| Antenna type | Omnidirectional | Omnidirectional |
| Max refractions | 5 | 12 |
| Max reflections | 5 | 12 |
| Max diffractions | 1 | 1 |
| Variable | Min. Value | Max. Value | Type |
|---|---|---|---|
| X | 0 | 6 | Coordinates |
| Y | 0 | 21 | Coordinates |
| Z | 0.5 | 2 | Coordinates |
| AP1 | −84 dBm | −28 dBm | RSS value |
| AP2 | −86 dBm | −30 dBm | RSS value |
| AP3 | −84 dBm | −35 dBm | RSS value |
| AP4 | −87 dBm | −32 dBm | RSS value |
| AP5 | −109 dBm | −37 dBm | RSS value |
| BLE01 | −105 dBm | −32 dBm | RSS value |
| BLE02 | −86 dBm | −32 dBm | RSS value |
| BLE03 | −97 dBm | −35 dBm | RSS value |
| BLE04 | −120 dBm | −42 dBm | RSS value |
| Hyperparameter | Value |
|---|---|
| Learning algorithm | ADAM |
| Learning rate | 0.001 |
| 1 | 0.9 |
| 2 | 0.999 |
| Dropout | 0.35 |
| Momentum | 0.99 |
| Batch size | 64 |
| 1e-07 | |
| Number of hidden layers | 3 |
| Number of hidden layers in each neuron | 128 |
| Hybrid | Hybrid No Fusion | Simulated | Simulated No Fusion | |
|---|---|---|---|---|
| 0.5 m | 0 | 9 | 17 | 18 |
| 1 m | 8 | 8 | 14 | 17 |
| 1.5 m | 3 | 5 | 10 | 11 |
| 2 m | 5 | 6 | 7 | 10 |
| Total | 16 | 28 | 48 | 56 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
El Boudani, B.; Dagiuklas, T.; Kanaris, L.; Iqbal, M.; Chrysoulas, C. Information Fusion for 5G IoT: An Improved 3D Localisation Approach Using K-DNN and Multi-Layered Hybrid Radiomap. Electronics 2023, 12, 4150. https://doi.org/10.3390/electronics12194150
El Boudani B, Dagiuklas T, Kanaris L, Iqbal M, Chrysoulas C. Information Fusion for 5G IoT: An Improved 3D Localisation Approach Using K-DNN and Multi-Layered Hybrid Radiomap. Electronics. 2023; 12(19):4150. https://doi.org/10.3390/electronics12194150
Chicago/Turabian StyleEl Boudani, Brahim, Tasos Dagiuklas, Loizos Kanaris, Muddesar Iqbal, and Christos Chrysoulas. 2023. "Information Fusion for 5G IoT: An Improved 3D Localisation Approach Using K-DNN and Multi-Layered Hybrid Radiomap" Electronics 12, no. 19: 4150. https://doi.org/10.3390/electronics12194150