
An Indoor Tags Position Perception Method Based on GWO–MLP Algorithm for RFID Robot

 ,
,
Abstract
:1. Introduction
2. Related Work
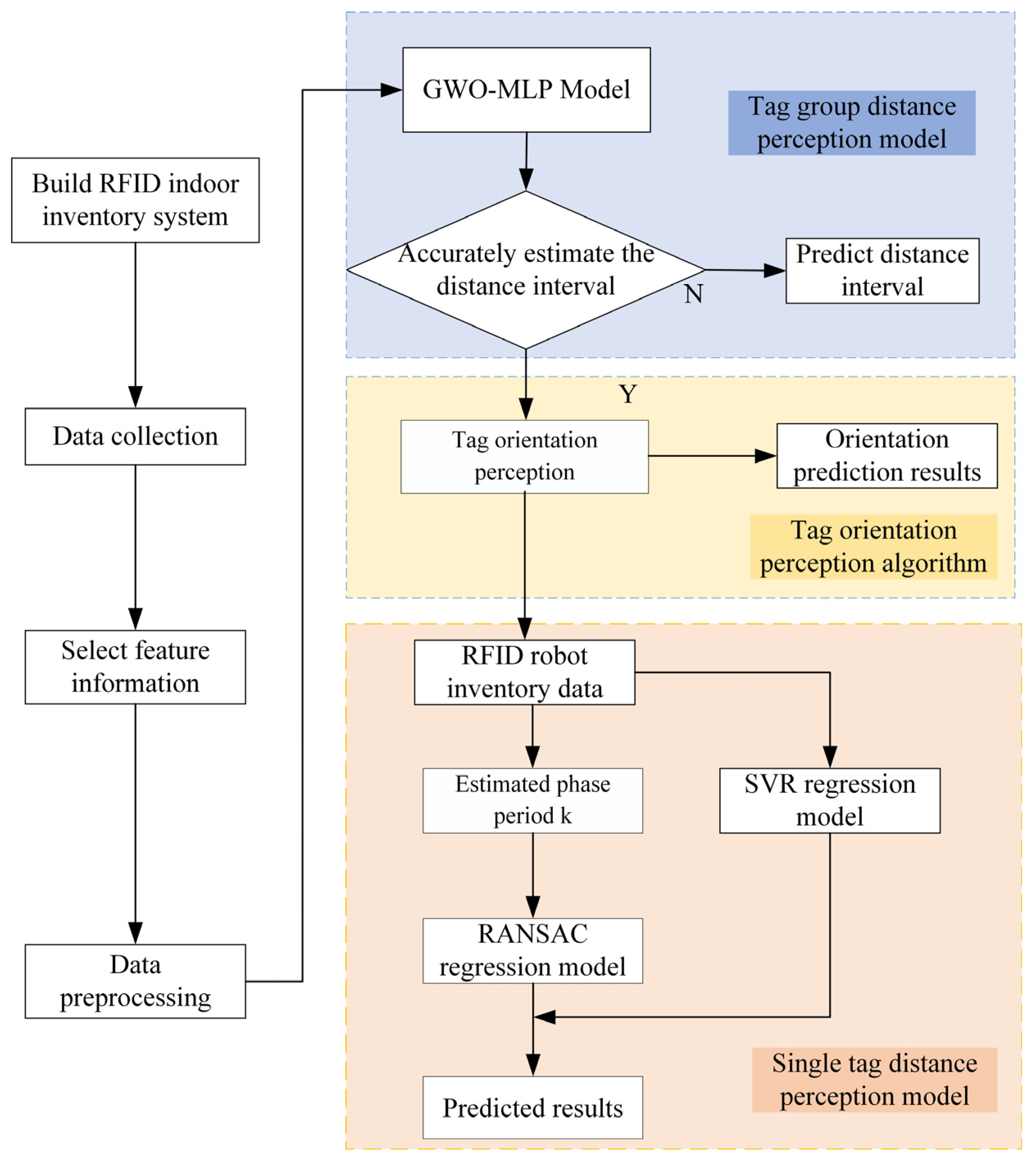
3. RFID Tag Position Perception Method and Theoretical Algorithm
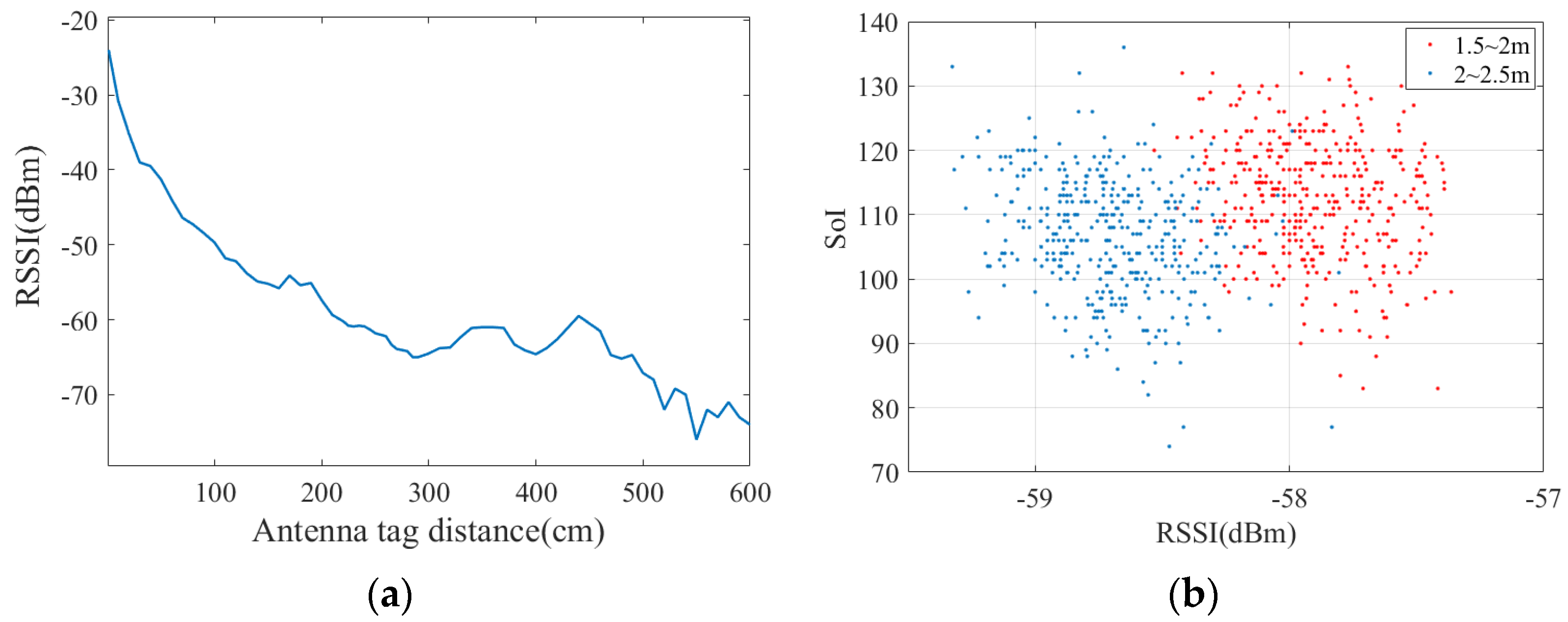
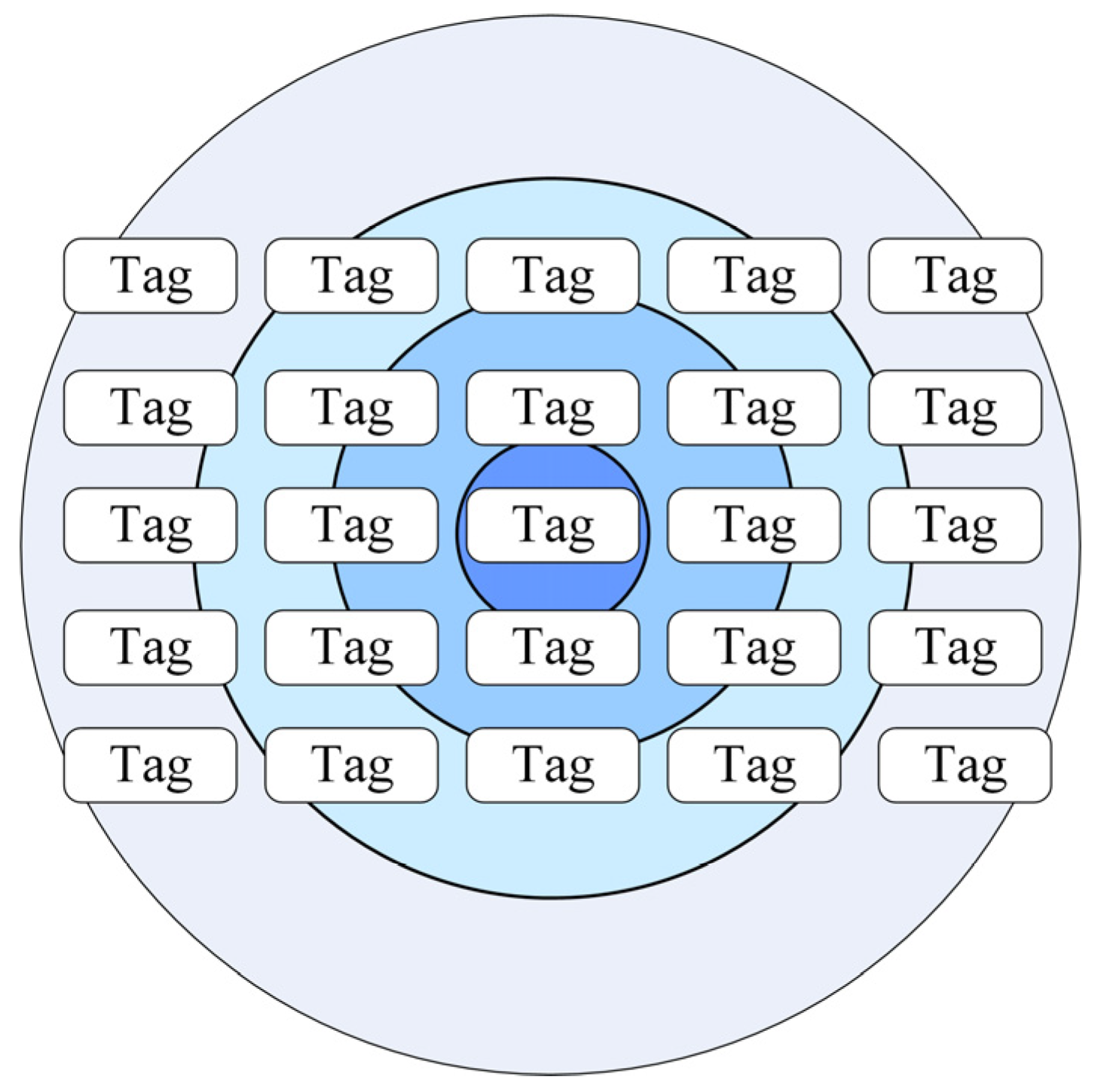
3.1. Basic Theory of Distance Perception for RFID Tag Groups
3.1.1. Combining RSSI and SoI for Distance Prediction
3.1.2. GWO–MLP Algorithm
- 1.
- Grey Wolf Optimizer Algorithm
- 2.
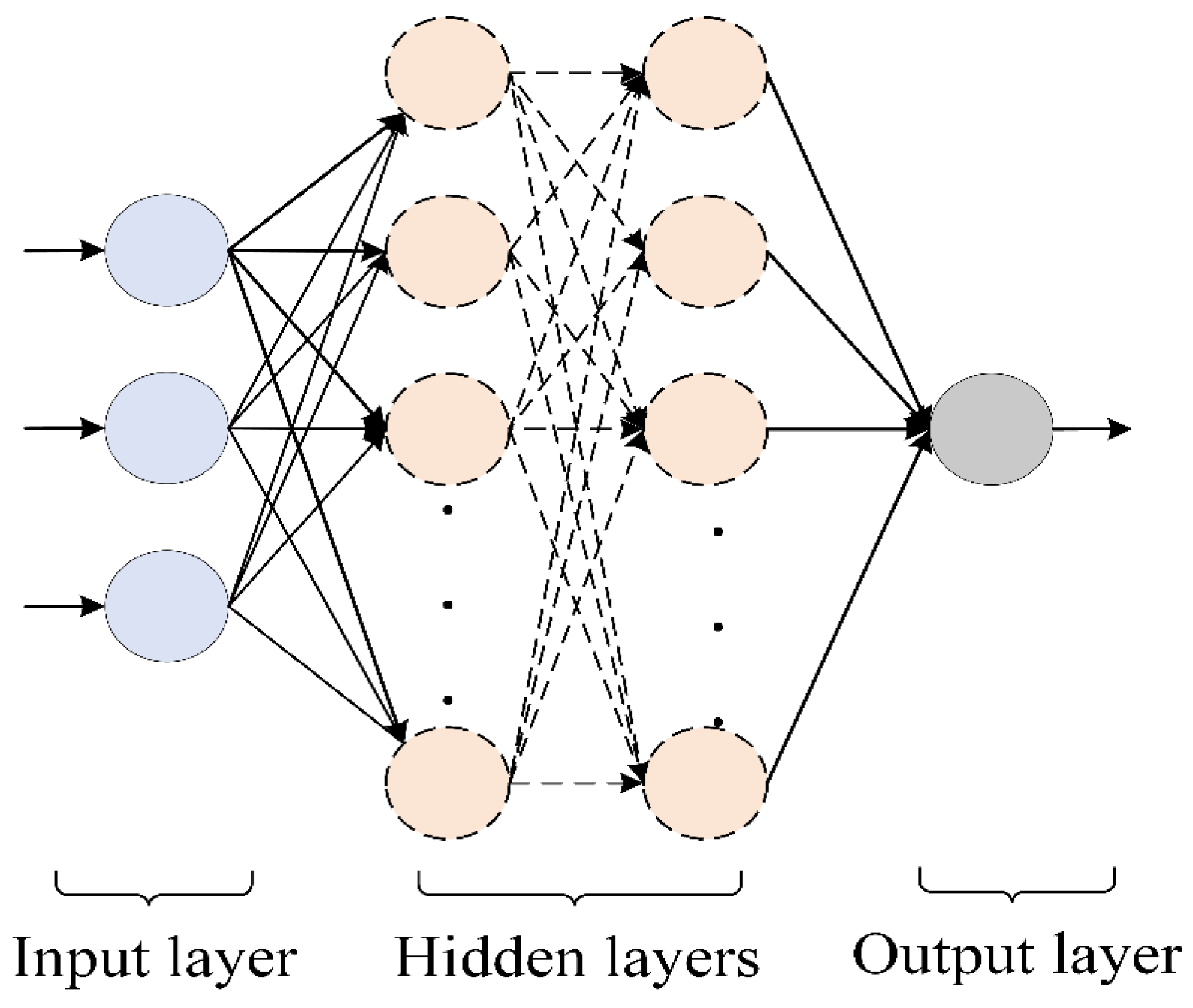
- Multilayer Perception Machine Neural Network Model
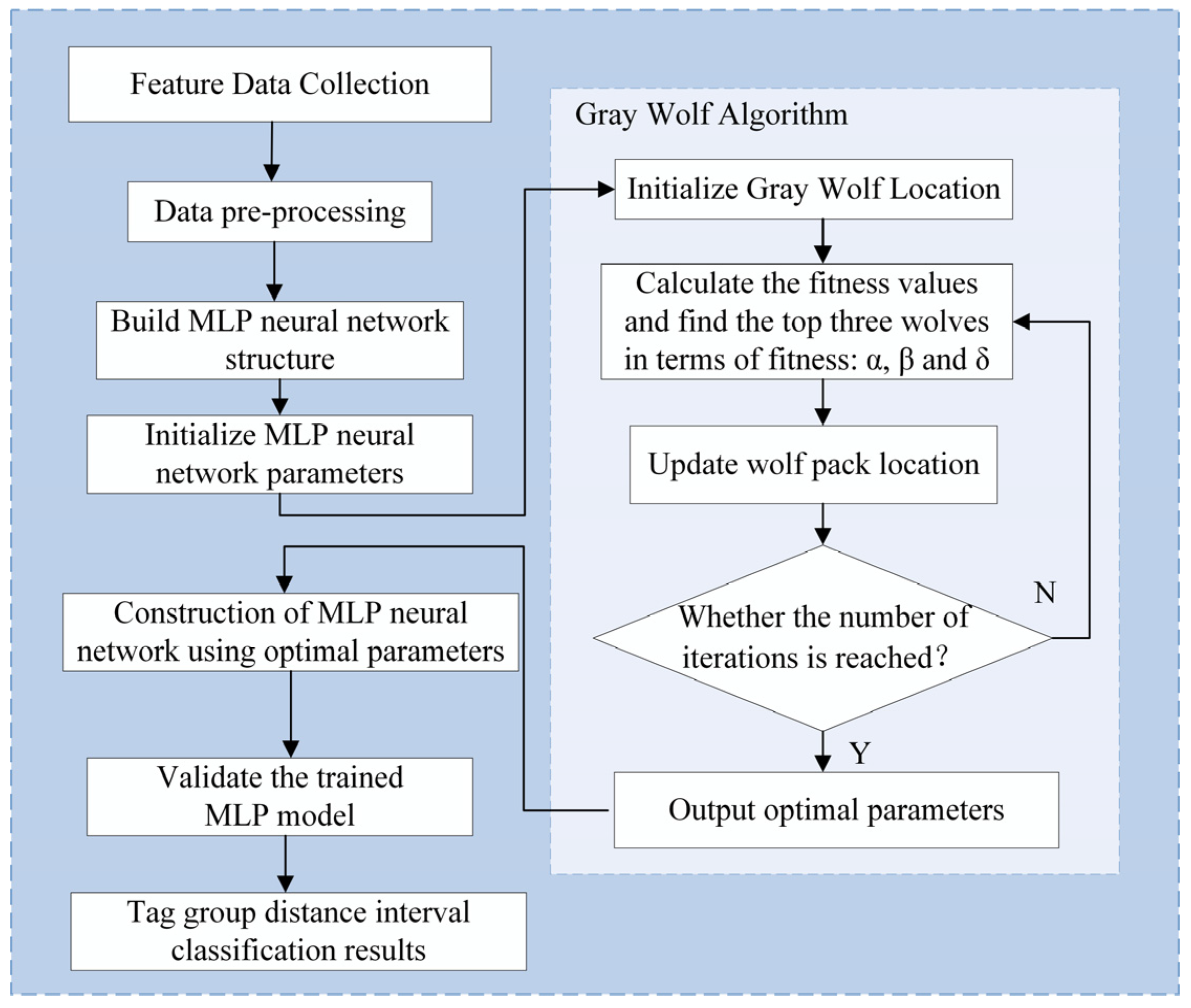
3.1.3. Grey Wolf Optimization–Based MLP Multi–Classification Model
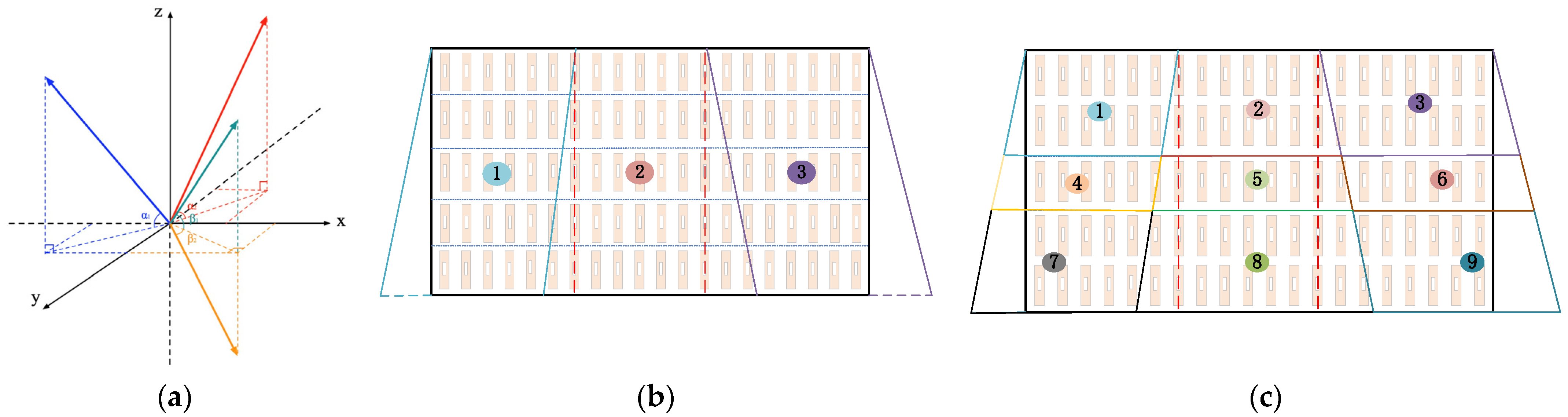
3.2. RFID Tag Orientation Perception Base Theory
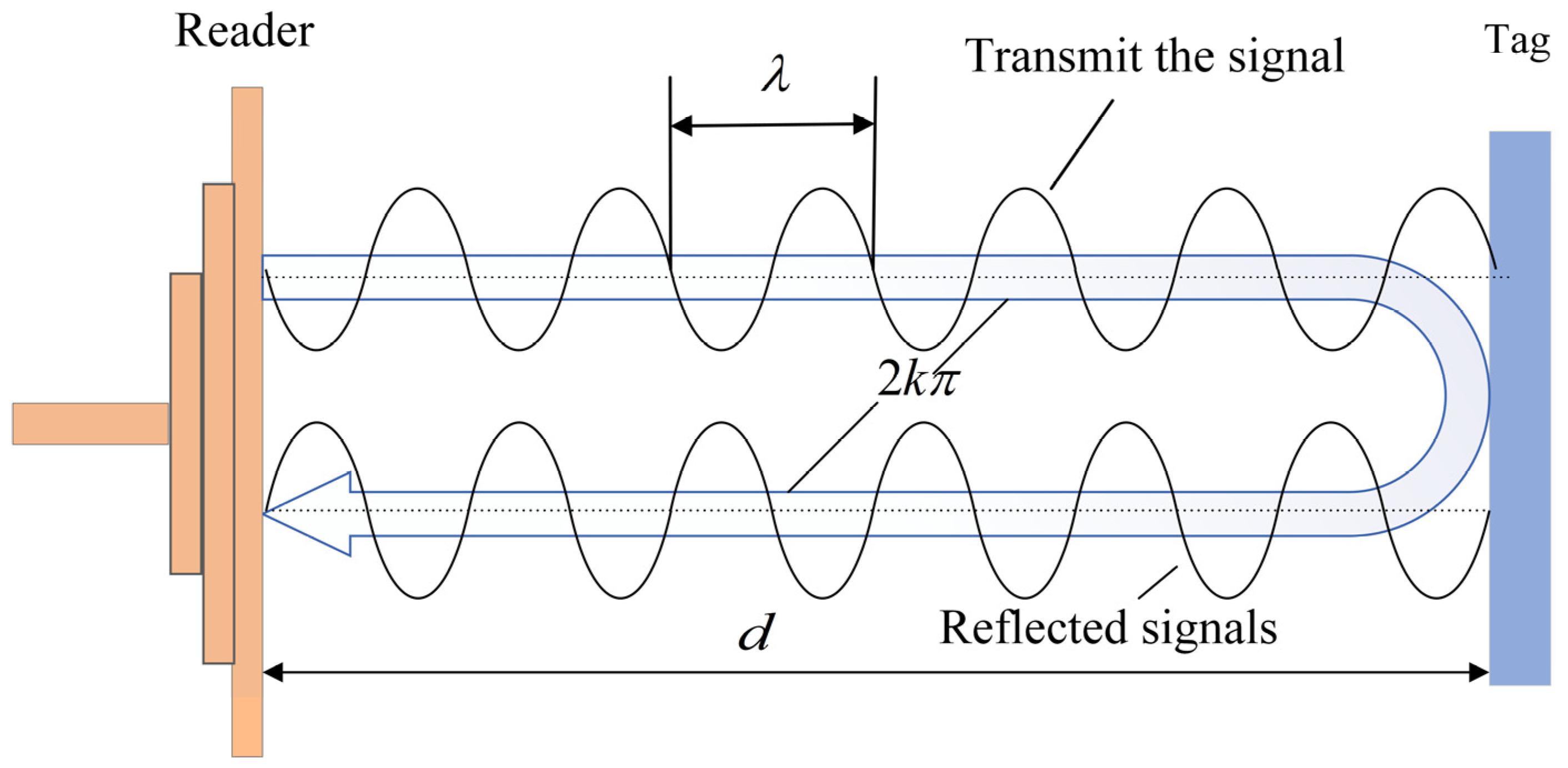
3.3. RFID Single Tag Precise Distance Perception Base Theory
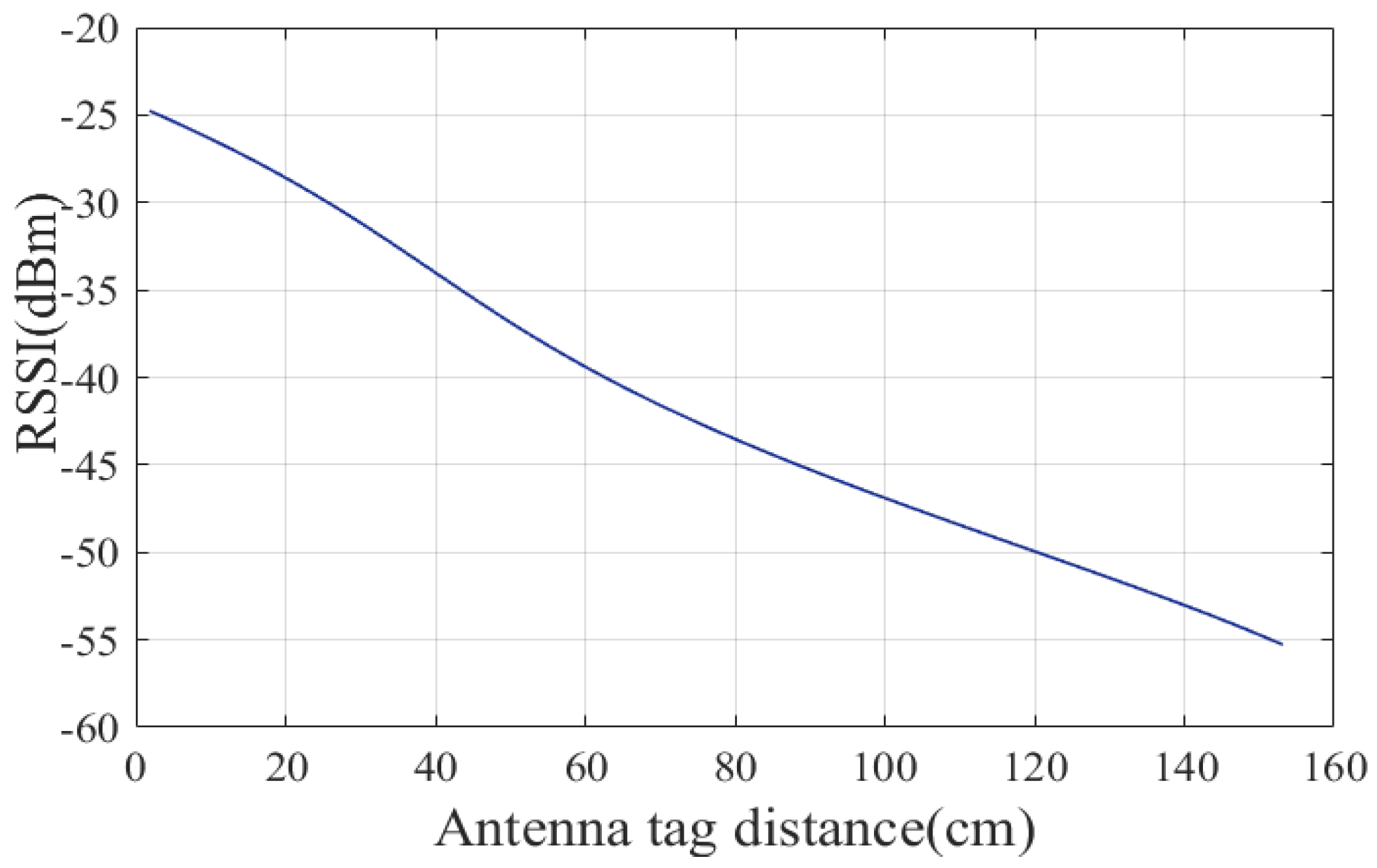
3.3.1. RSSI Distance Perception Based on SVR Algorithm
3.3.2. Phase Distance Perception Based on the RANSAC Algorithm
4. Indoor RFID Tag Position Perception Model Construction
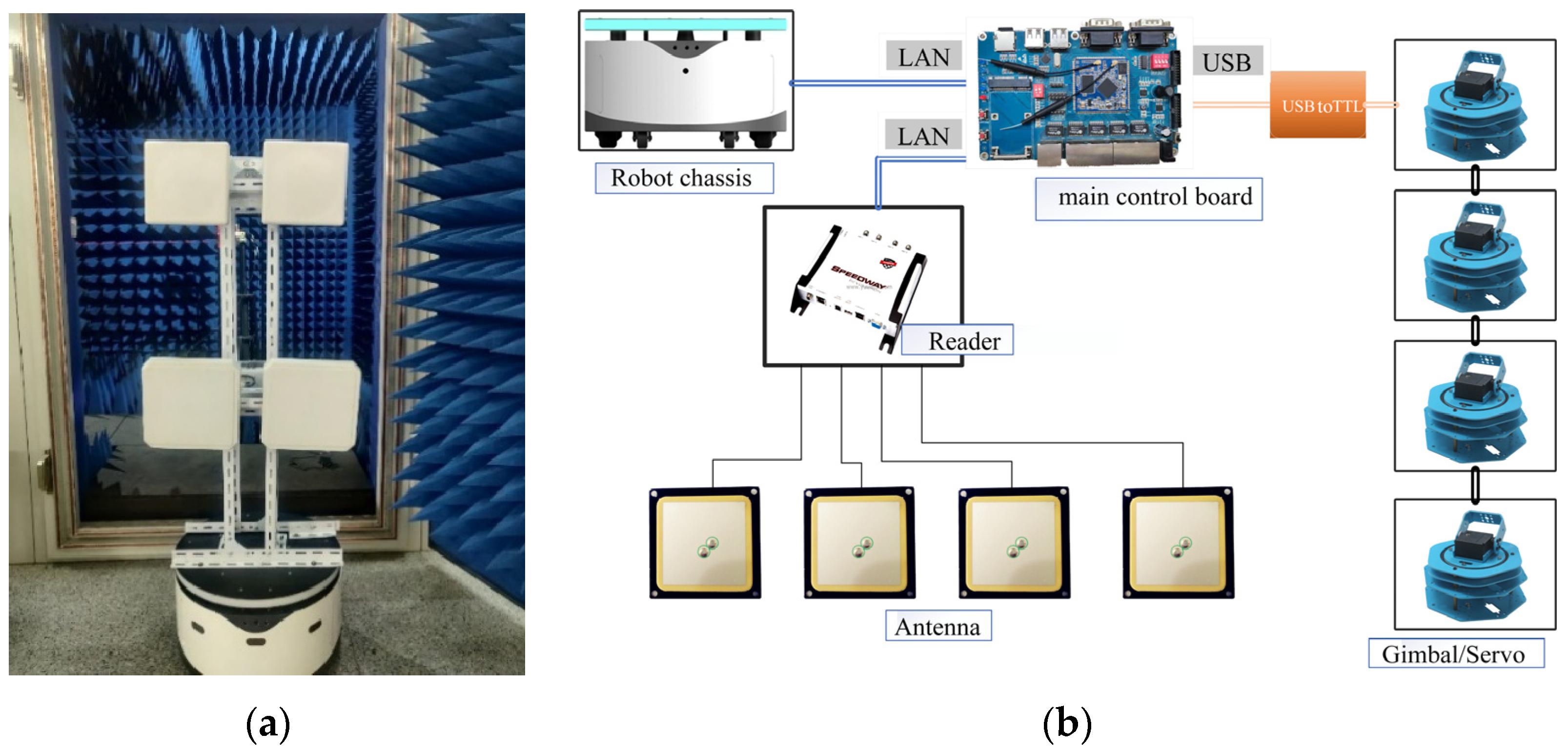
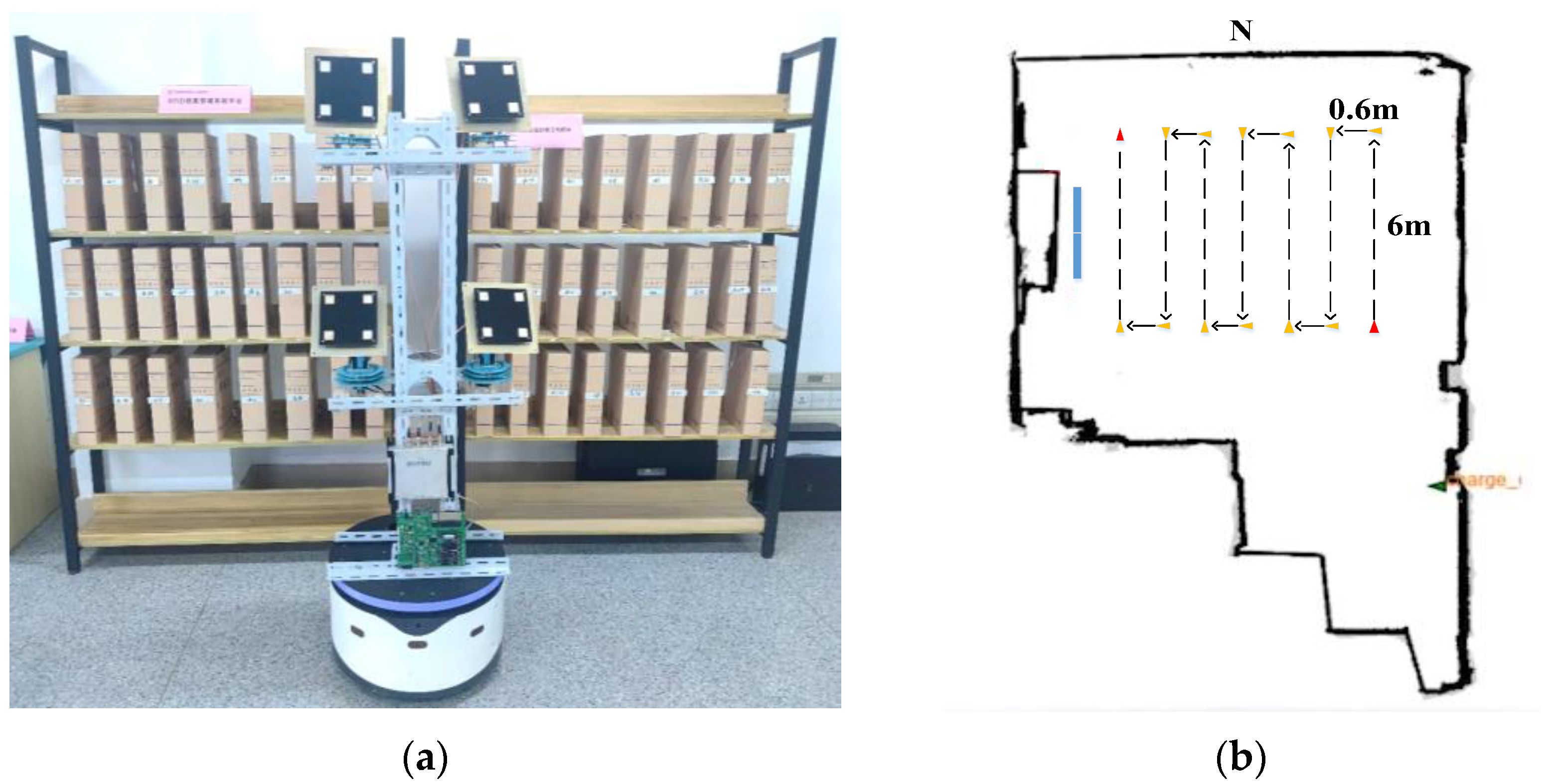
4.1. Testing Equipment
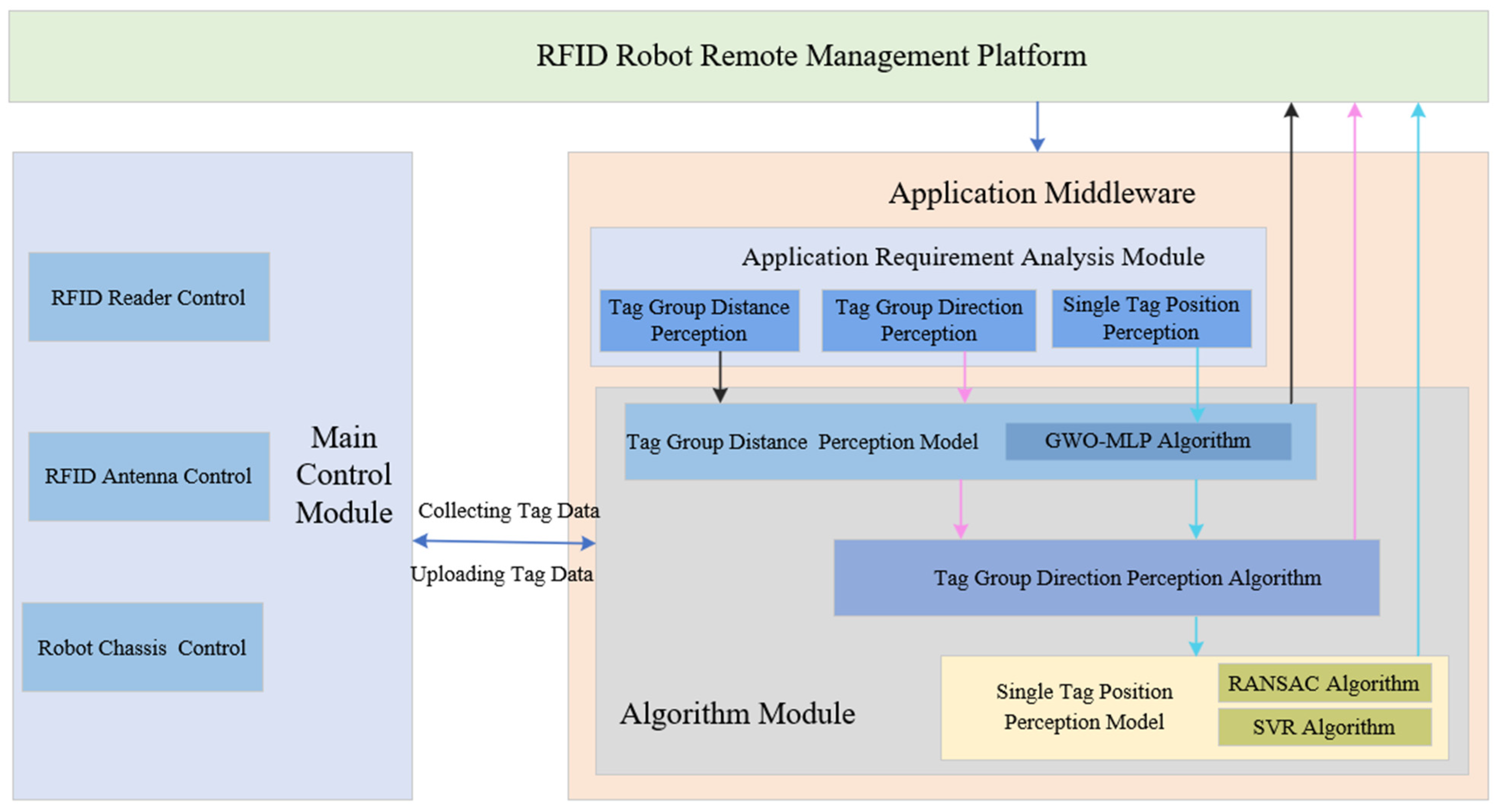
4.2. Software Architecture of RFID Robot Indoor Inventory System
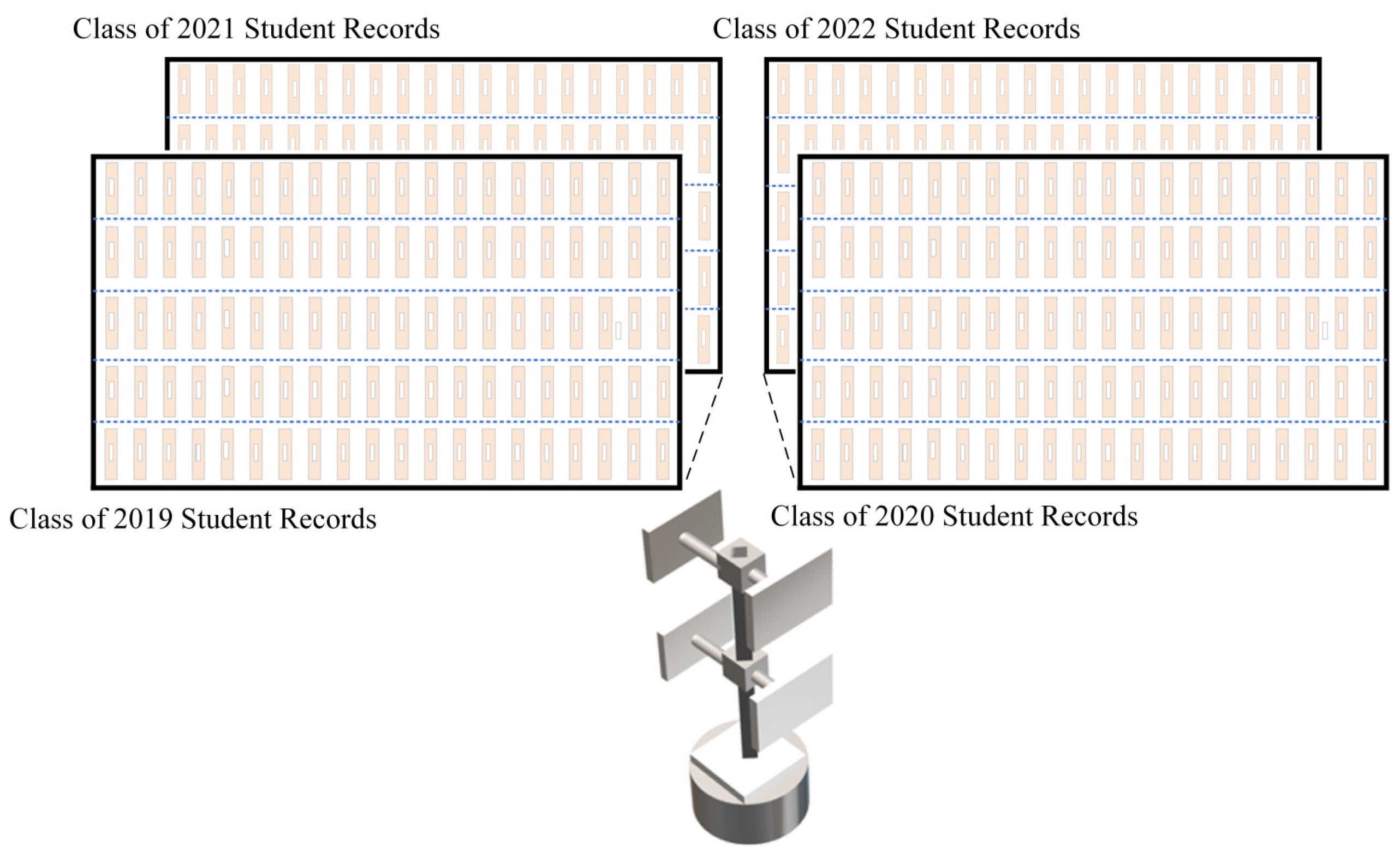
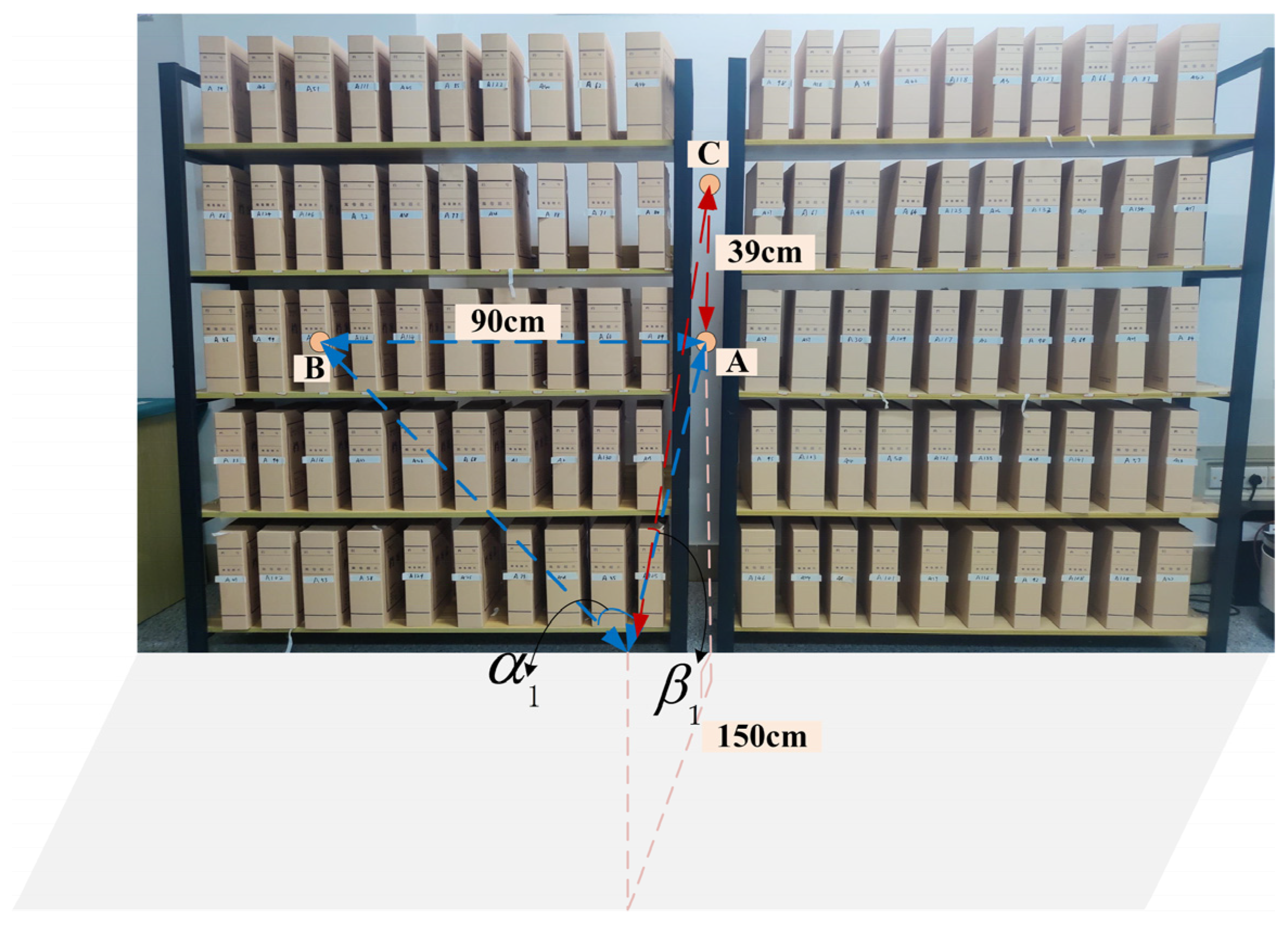
4.3. Testing Scenarios
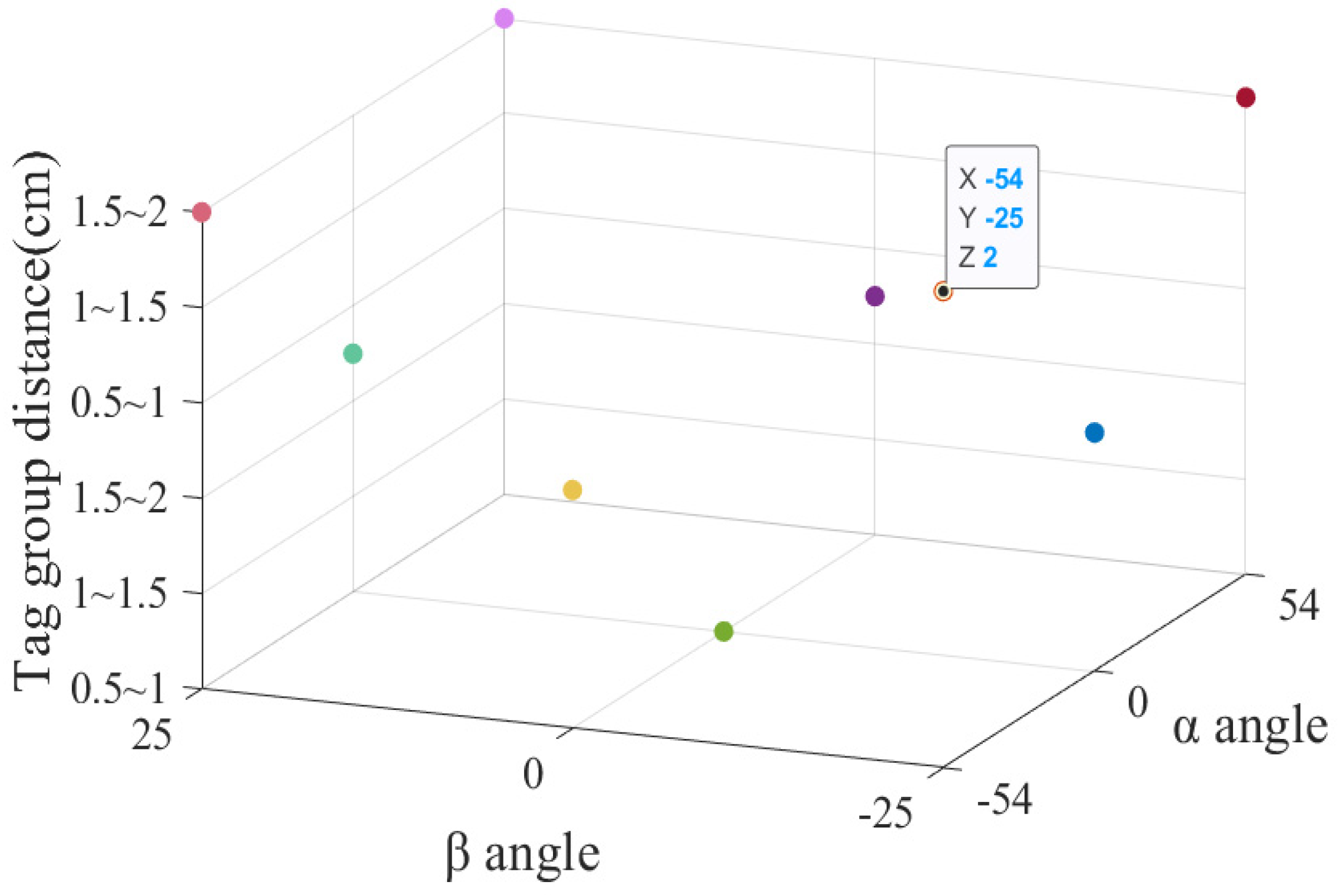
4.4. Tag Group Classification
4.5. Tag Group Distance Perception Model Building
4.5.1. Tag Group Distance Perception Data Collection
4.5.2. Establishment of GWO–MLP Model
4.5.3. GWO–MLP Neural Network Model Parameter Setting
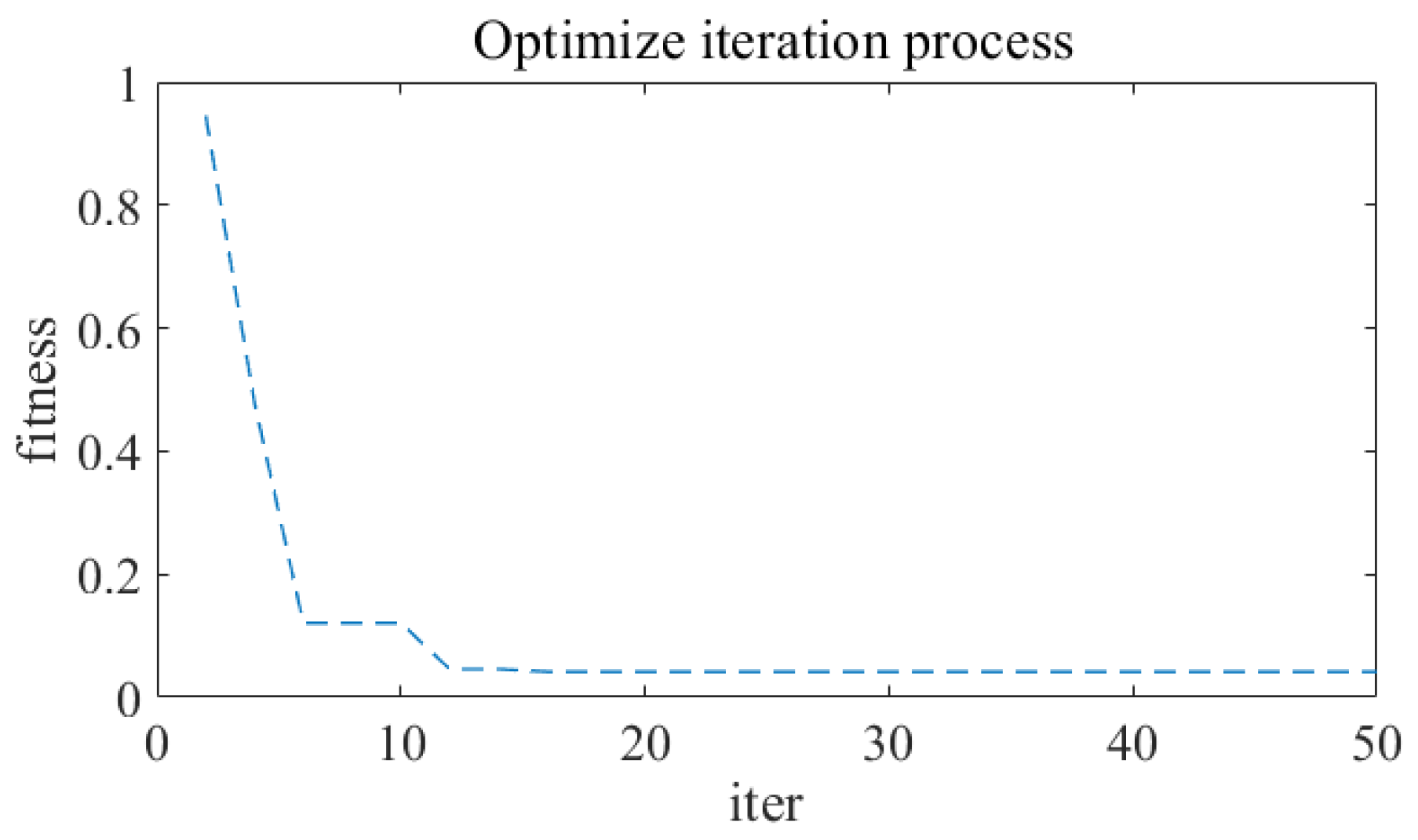
4.5.4. GWO–MLP Model Parameter Search Optimization
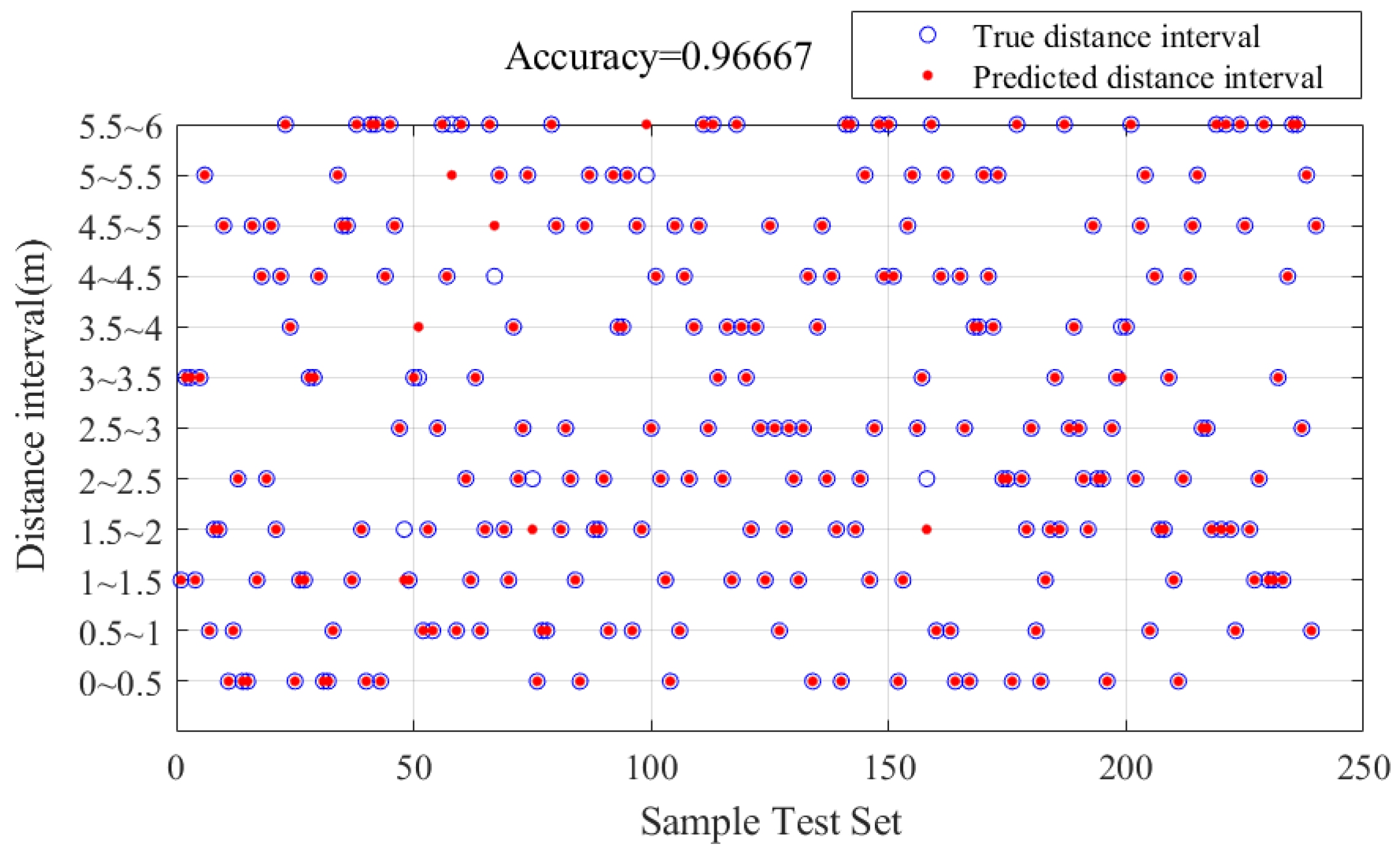
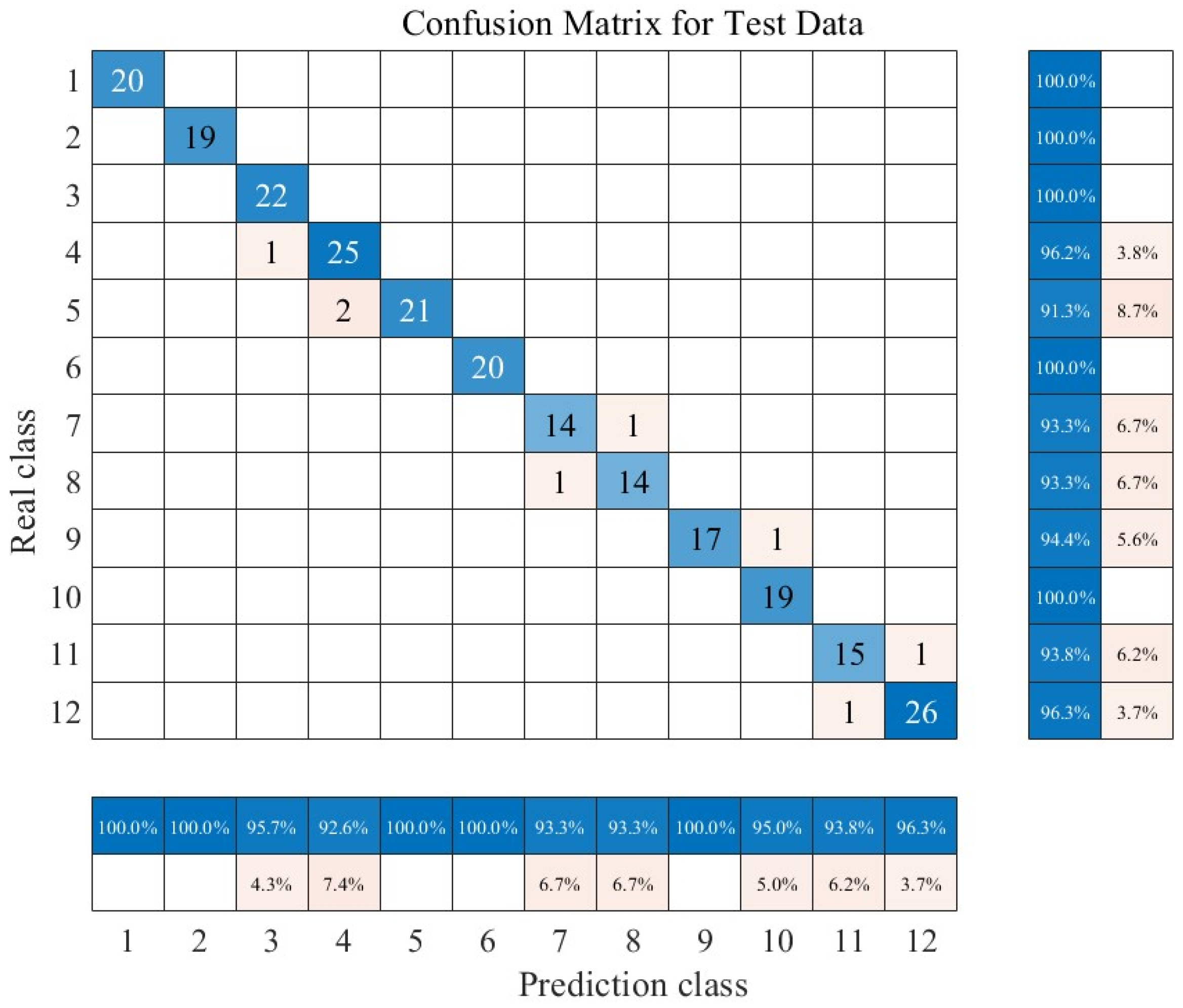
4.5.5. GWO–MLP Model Classification Results
4.6. Tag Group Orientation Prediction Algorithm
| Algorithm 1. Tag group division sub–tag group algorithm |
| Input: , , (: α1, α2, β1, β2) Output: |
for to do if ; if ; else for to do if ; ; else if ; else return |
| Algorithm 2. Tag group orientation perception algorithm |
| Input: , (: α1, α2, β1, β2), , Output: Coordinates of the sub–tag group |
| if return if return , , , , , , , , |
4.7. Single Tag Precise Distance Perception Model
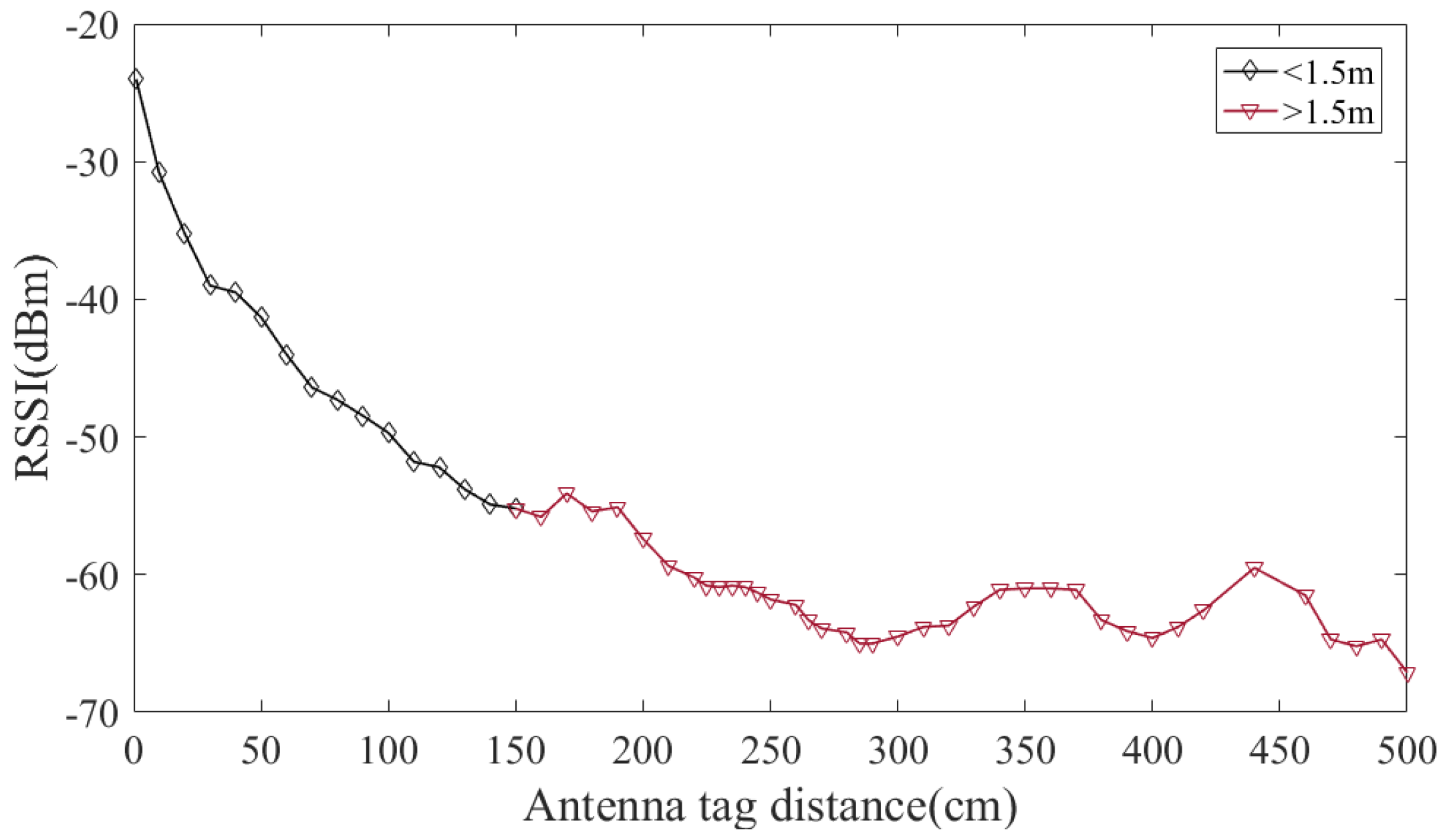
4.7.1. Data Collection and Pre–Processing
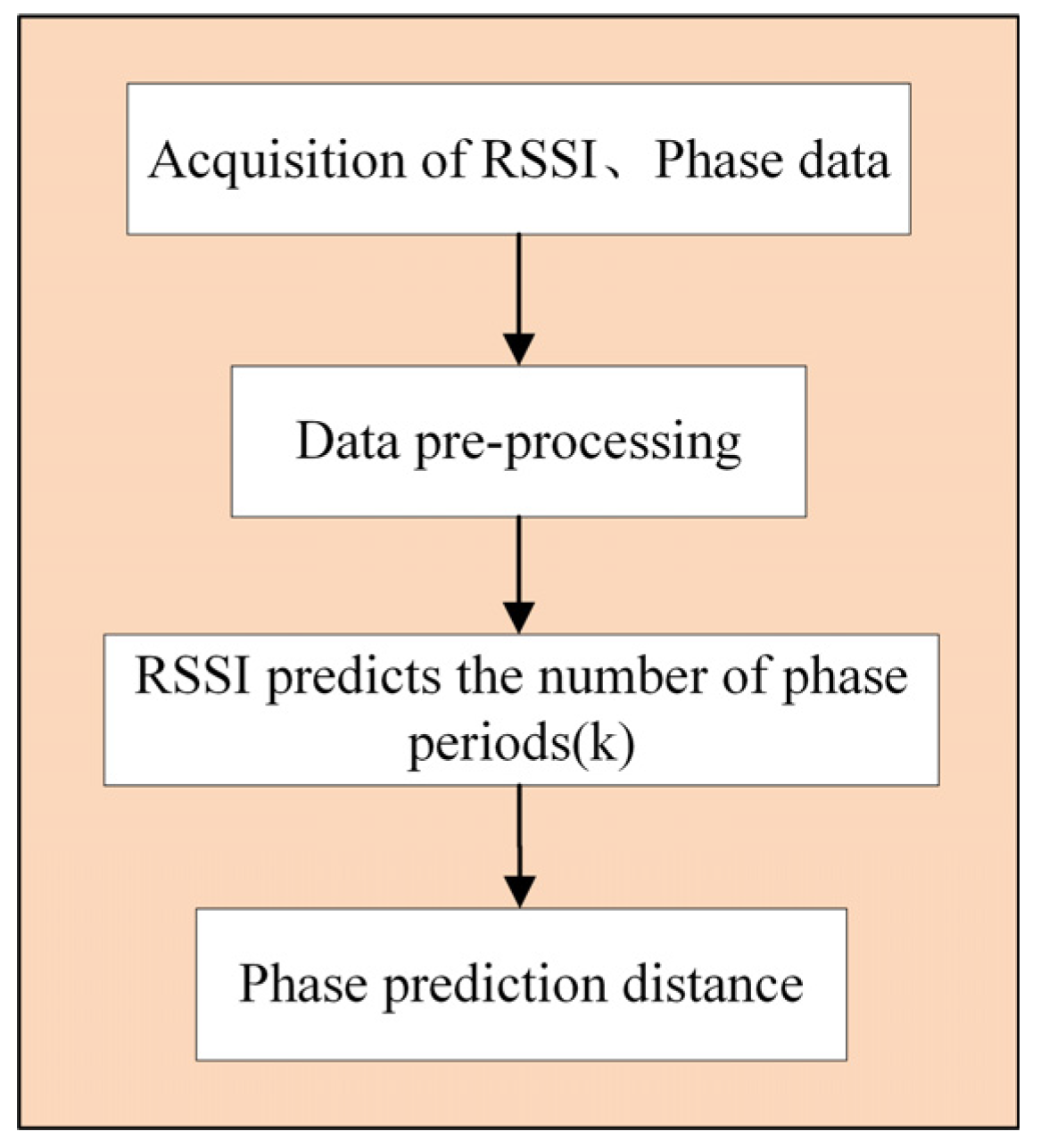
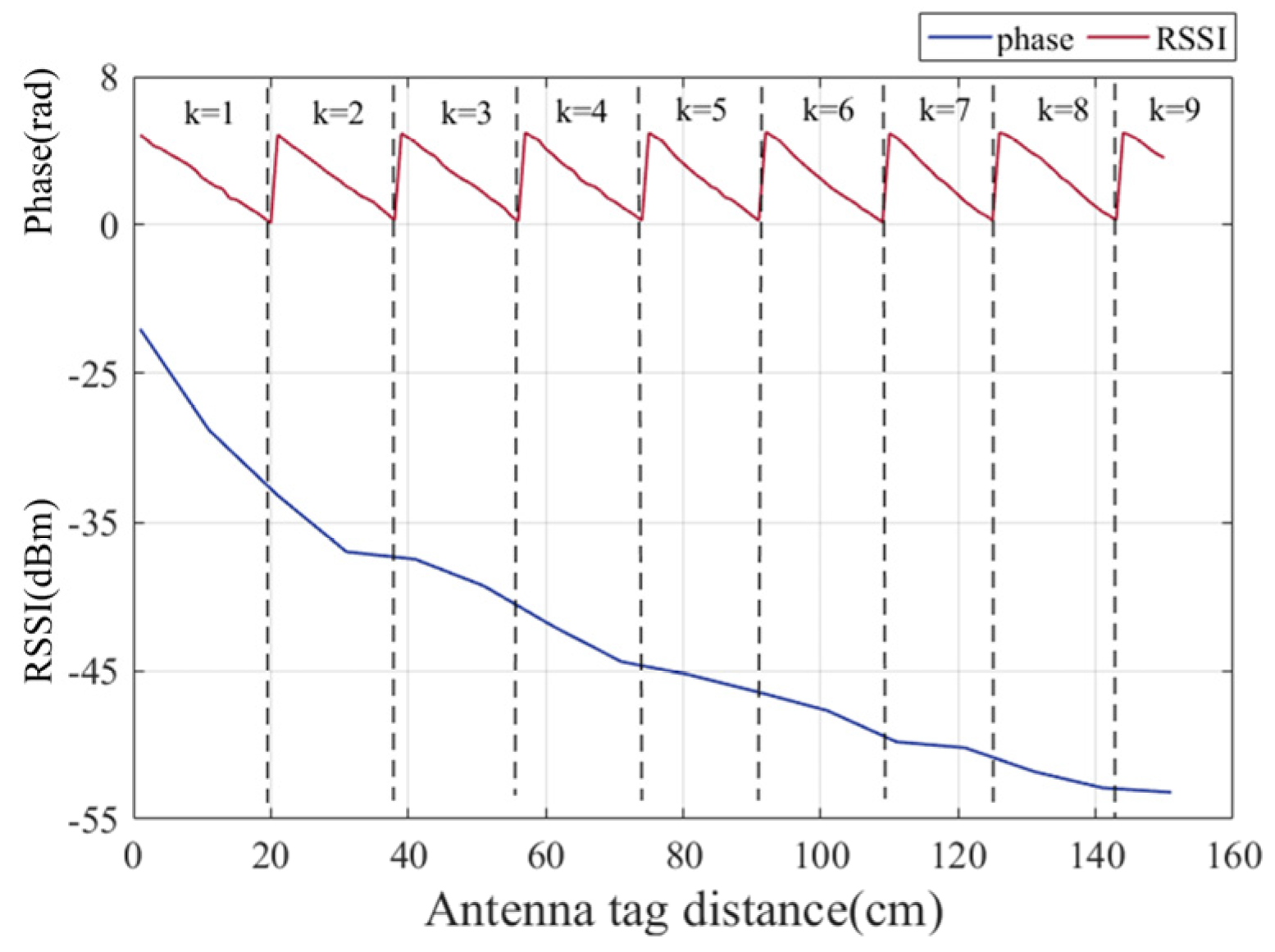
4.7.2. RSSI Estimates the Number of Cycles k Experienced by the Phase
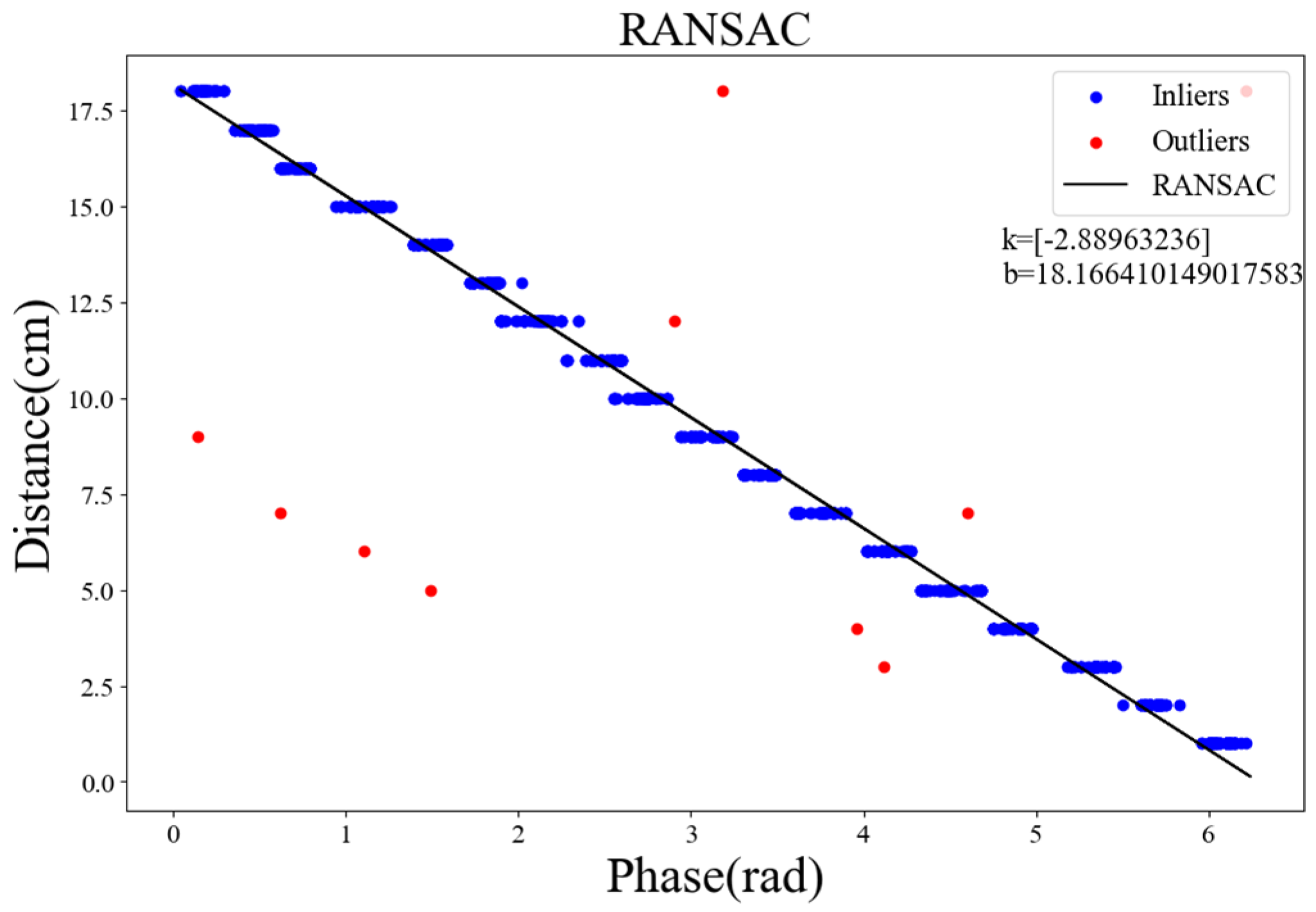
4.7.3. Phase Prediction Distance
4.7.4. Single Tag Close–Distance Perception Model Improvement Algorithm
| Algorithm 3. Single tag close–distance perception based on the k–value adjustment algorithm | |
| Input: Output: | |
| RSSI classification model: Input: Output: | SVR regression model: Input: Output: |
| RANSAC regression model: Input: Output: | |
| If then return: else If then return: else return: | |
5. Indoor RFID Tag Position Perception Model Validation
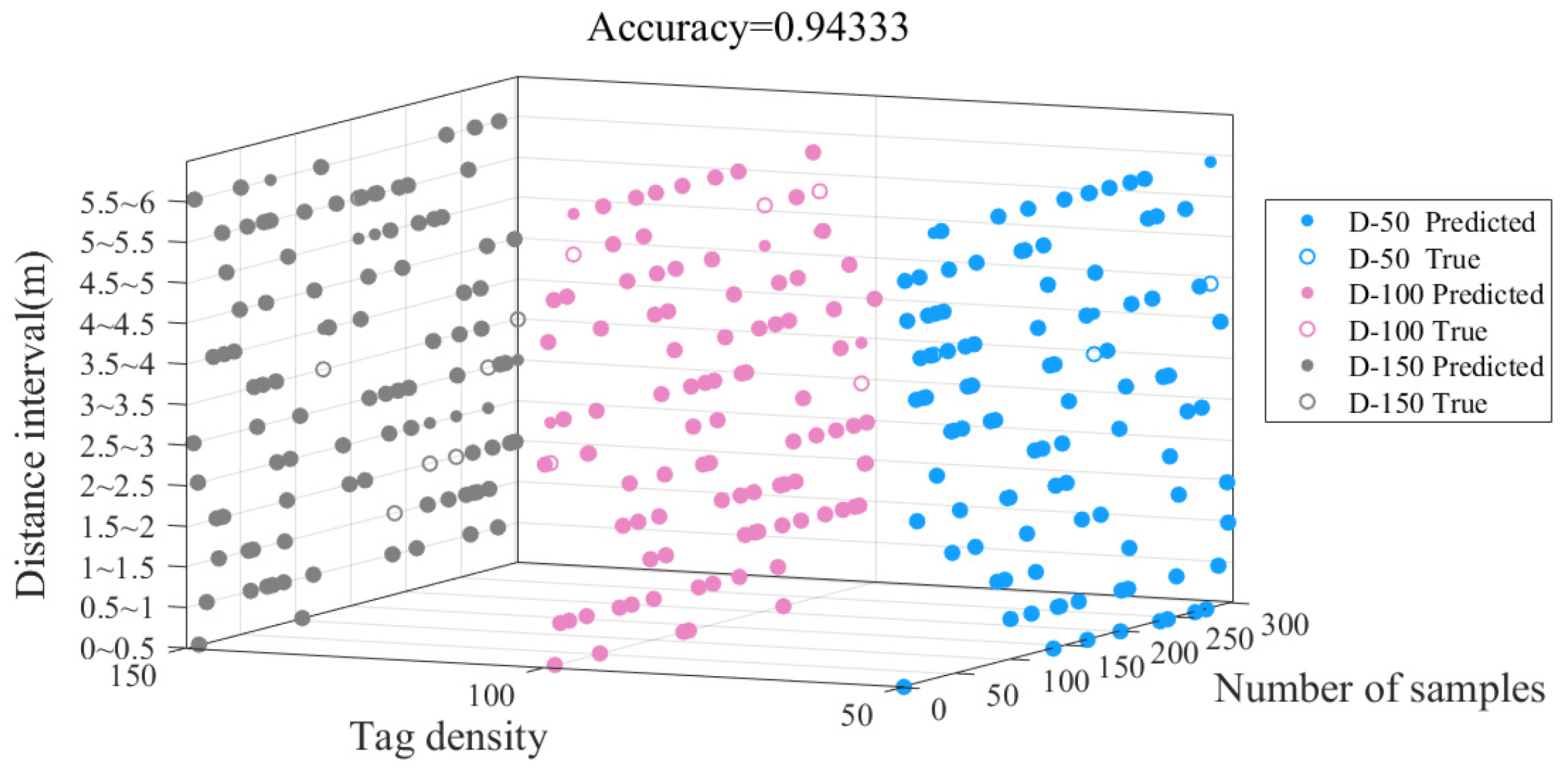
5.1. Tag Group Distance Perception Model Validation
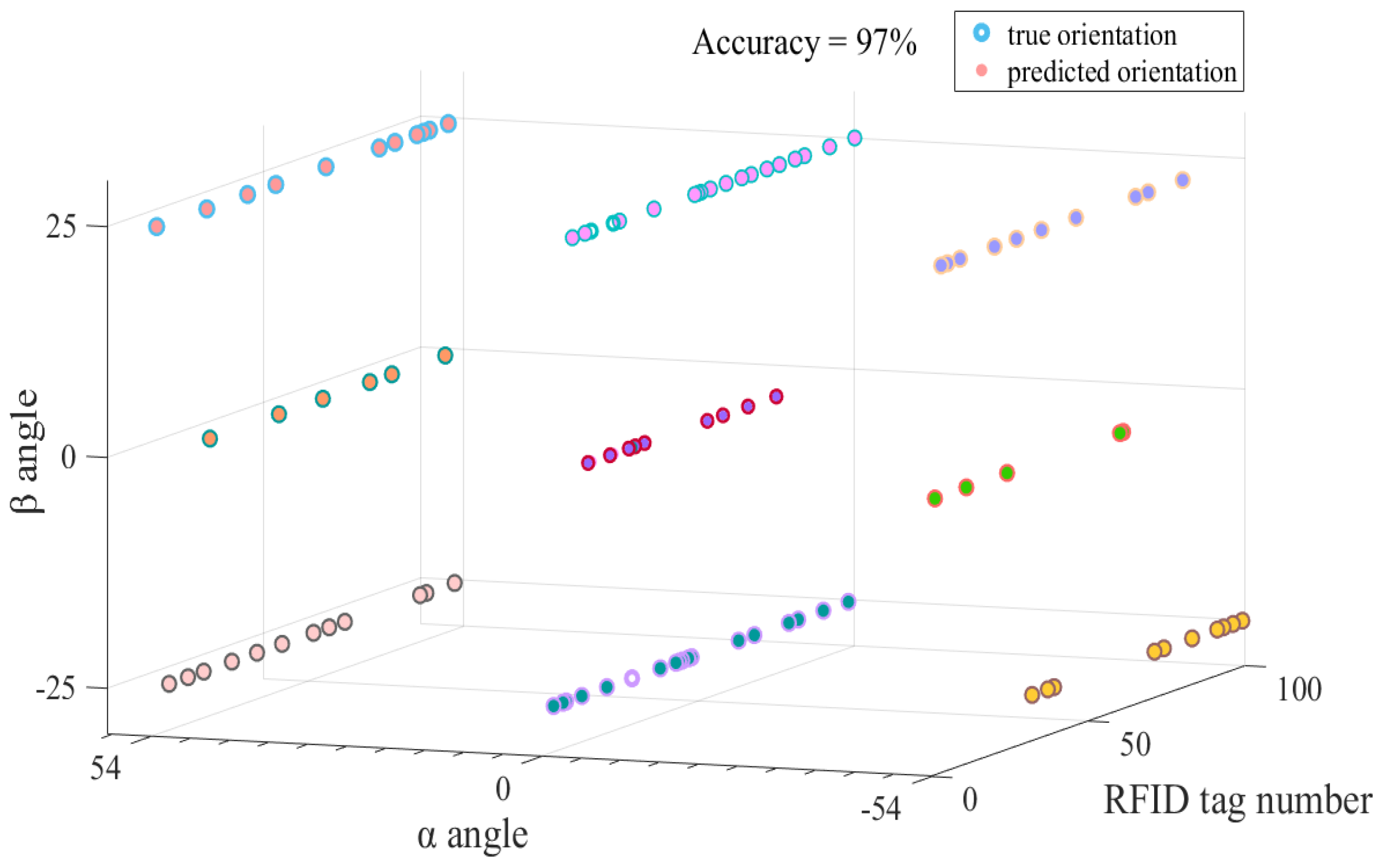
5.2. Tag Group Orientation Prediction Algorithm Verification
- 1.
- Antenna rotation angles values
- 2.
- Threshold values for and
- 3.
- Algorithm validation
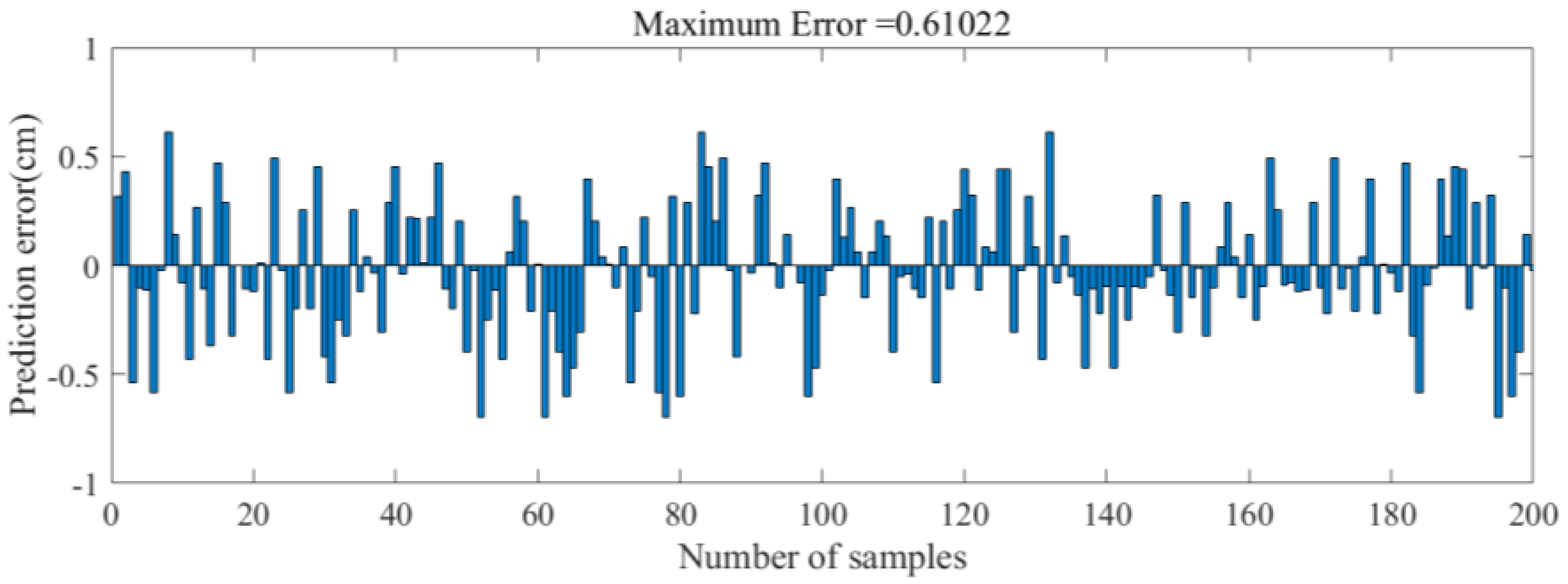
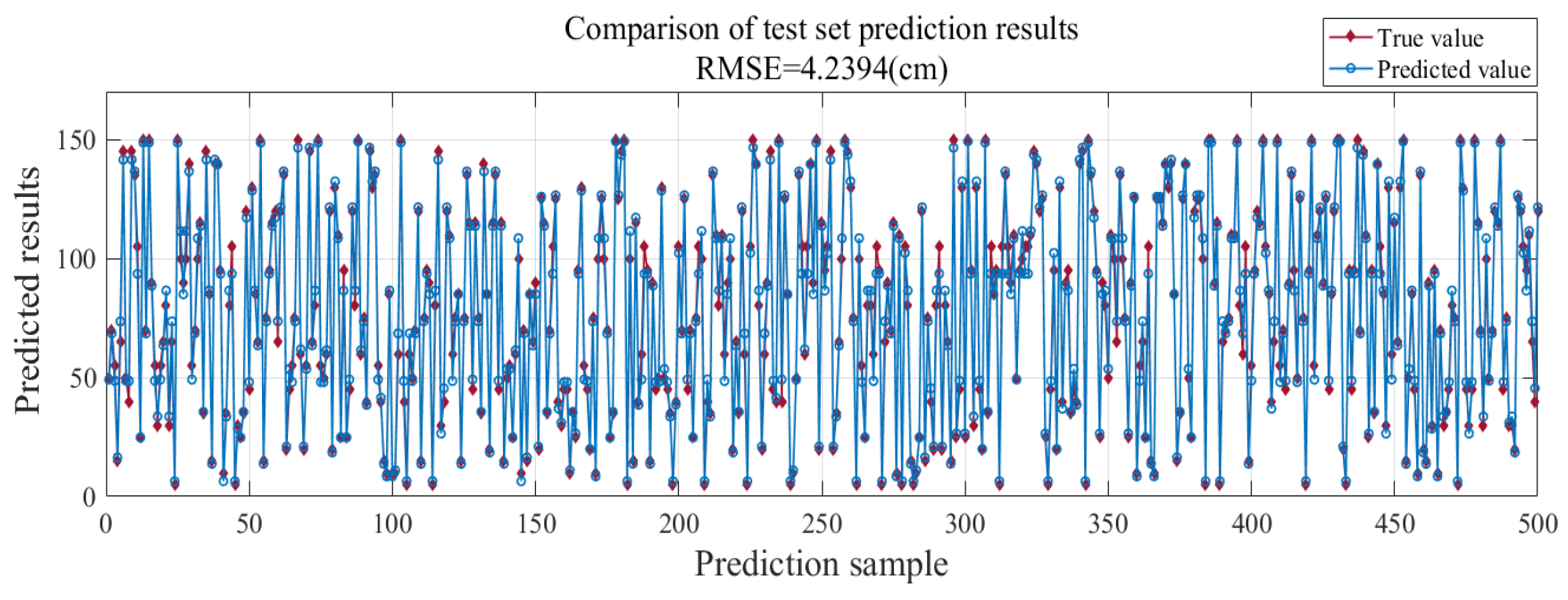
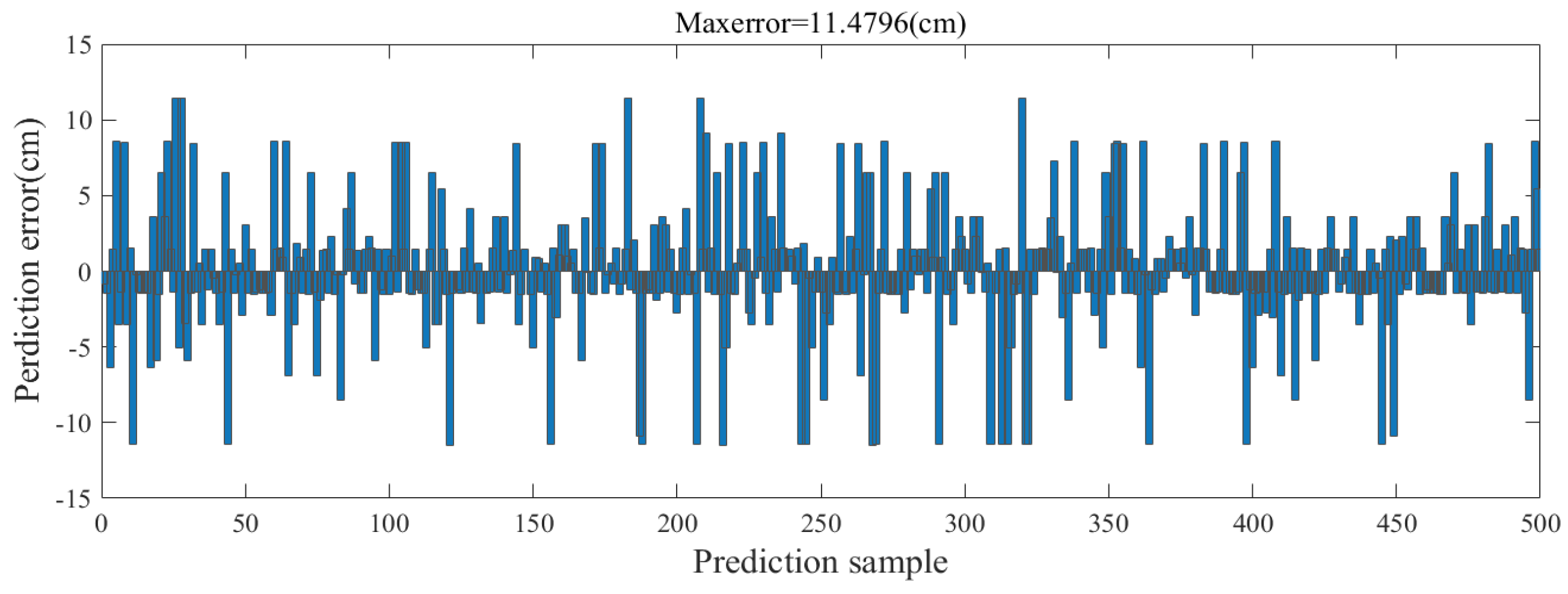
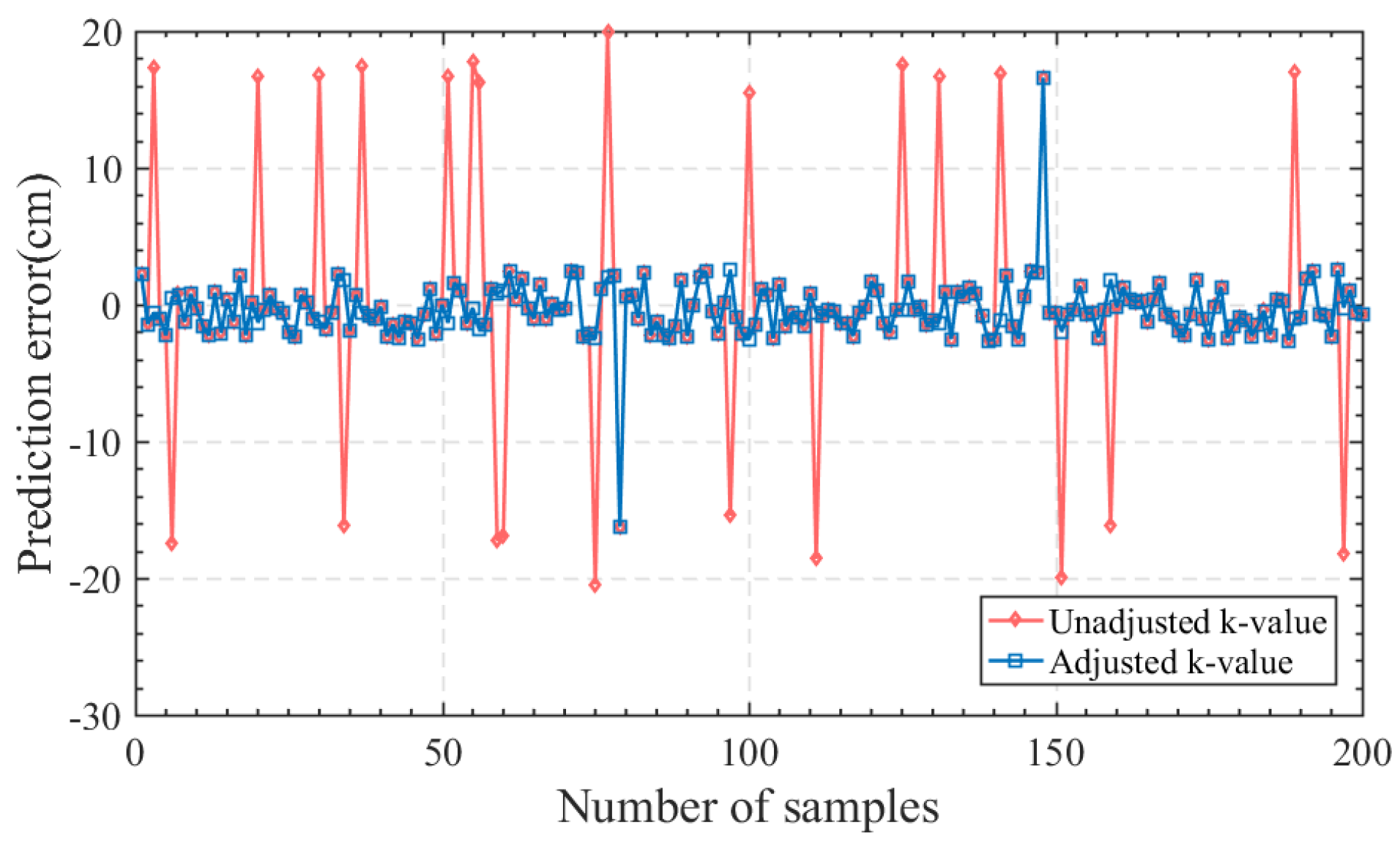
5.3. Single Tag Close–Distance Perception Model Improvement Algorithm
5.4. Comparison with Different Positioning Methods
6. Conclusions
- The propagation model of the UHF RFID system will be deeply studied to identify the reading blind area caused by antenna polarization mismatch and multipath fading, to improve the granularity of the tag direction perception model;
- Research on phased array antennas, which enable beamforming control by manipulating the high and low levels of the antenna elements, to achieve more precise and efficient tag position perception.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhao, A.; Sunny, A.I.; Li, L.; Wang, T. Machine Learning-Based Structural Health Monitoring Using RFID for Harsh Environmental Conditions. Electronics 2022, 11, 1740. [Google Scholar] [CrossRef]
- Liu, B.; Xu, H.; Zhou, X. Resource Allocation in Wireless-Powered Mobile Edge Computing Systems for Internet of Things Applications. Electronics 2019, 8, 206. [Google Scholar] [CrossRef]
- Wu, H.; Tao, B.; Gong, Z.; Yin, Z.; Ding, H. A Standalone RFID-Based Mobile Robot Navigation Method Using Single Passive Tag. IEEE Trans. Autom. Sci. Eng. 2020, 18, 1529–1537. [Google Scholar] [CrossRef]
- Khan, Z.; Chen, X.; He, H.; Xu, J.; Wang, T.; Cheng, L.; Ukkonen, L.; Virkki, J. Glove-Integrated Passive UHF RFID Tags—Fabrication, Testing and Applications. IEEE J. Radio Freq. Identif. 2019, 3, 127–132. [Google Scholar] [CrossRef]
- Zhao, N.; Zhang, L.; Lei, L.; Cai, S. Dynamic Query Tree Anti-Collision Protocol for RFID Systems. In Proceedings of the 2019 IEEE 25th International Conference on Parallel and Distributed Systems (ICPADS), Tianjin, China, 4–6 December 2019. [Google Scholar]
- Montanaro, T.; Sergi, I.; Motroni, A.; Buffi, A.; Nepa, P.; Pirozzi, M.; Catarinucci, L.; Colella, R.; Chietera, F.P.; Patrono, L. An IoT-Aware Smart System Exploiting the Electromagnetic Behavior of UHF-RFID Tags to Improve Worker Safety in Outdoor Environments. Electronics 2022, 11, 717. [Google Scholar] [CrossRef]
- Li, C.; Mo, L.; Zhang, D. Review on UHF RFID Localization methods. IEEE J. Radio Freq. Identif. 2019, 3, 205–215. [Google Scholar] [CrossRef]
- Dobrev, Y.; Vossiek, M.; Christmann, M.; Bilous, I.; Gulden, P. Steady Delivery: Wireless Local Positioning Systems for Tracking and Autonomous Navigation of Transport Vehicles and Mobile Robots. IEEE Microw. Mag. 2017, 18, 26–37. [Google Scholar] [CrossRef]
- Zhou, J.; Shi, J. RFID localization algorithms and applications—A review. J. Intell. Manuf. 2009, 20, 695–707. [Google Scholar] [CrossRef]
- Ni, L.M.; Liu, Y.; Lau, Y.C.; Patil, A.P. LANDMARC: Indoor Location Sensing Using Active RFID. In Proceedings of the First IEEE International Conference on Pervasive Computing and Communications, Fort Worth, TX, USA, 23–26 March 2003. [Google Scholar]
- Zhao, Y.; Liu, Y.; Ni, L.M. VIRE: Active RFID-based Localization Using Virtual Reference Elimination. In Proceedings of the 2007 International Conference on Parallel Processing (ICPP 2007), Xi’an, China, 10–14 September 2007; p. 56. [Google Scholar]
- Ma, Y.; Wang, B.; Pei, S.; Zhang, Y.; Zhang, S.; Yu, J. An Indoor Localization Method Based on AOA and PDOA Using Virtual Stations in Multipath and NLOS Environments for Passive UHF RFID. IEEE Access 2018, 6, 31772–31782. [Google Scholar] [CrossRef]
- Ai, Z.; Liu, Y. Research on the TDOA measurement of active RFID real time location system. In Proceedings of the 2010 3rd International Conference on Computer Science and Information Technology, Chengdu, China, 9–11 July 2010; Volume 2, pp. 410–412. [Google Scholar]
- Qi, Y.; Luo, P.; XU, C.; Wan, J.; He, J. Target Localization in Industrial Environment based on TOA Ranging. In Proceedings of the 2019 28th Wireless and Optical Communications Conference (WOCC), Beijing, China, 9–10 May 2019; pp. 1–5. [Google Scholar]
- Xu, H.; Ding, Y.; Li, P.; Wang, R.; Li, Y. An RFID Indoor Positioning Algorithm Based on Bayesian Probability and K-Nearest Neighbor. Sensors 2017, 17, 1806. [Google Scholar] [CrossRef] [PubMed]
- Yang, L.; Liu, Q.; Xu, J.; Hu, J.; Song, T. An indoor RFID location algorithm based on support vector regression and particle swarm optimization. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 27–30 August 2018; pp. 1–6. [Google Scholar]
- Bernardini, F.; Buffi, A.; Fontanelli, D.; Macii, D.; Magnago, V.; Marracci, M.; Motroni, A.; Nepa, P.; Tellini, B. Robot-Based Indoor Positioning of UHF-RFID Tags:The SAR Method with Multiple Trajectories. IEEE Trans. Instrum. Meas. 2021, 70, 1–15. [Google Scholar] [CrossRef]
- Zeng, Y.; Chen, X.; Li, R.; Tan, H.Z. UHF RFID Indoor Positioning System with Phase Interference Model Based on Double Tag Array. IEEE Access 2019, 7, 76768–76778. [Google Scholar] [CrossRef]
- Chatzistefanou, A.R.; Dimitriou, A.G. Tag Localization by Handheld UHF RFID Reader and Optical Markers. In Proceedings of the 2022 IEEE 12th International Conference on RFID Technology and Applications (RFID-TA), Caligari, Italy, 12–14 September 2022; pp. 9–12. [Google Scholar] [CrossRef]
- Chu, Y.; Ma, Y.; Huang, K.; Fu, Y. A Fast Method for 3D Localization in SAR RFID System. In Proceedings of the 2022 IEEE 12th International Conference on RFID Technology and Applications (RFID-TA), Caligari, Italy, 12–14 September 2022; pp. 25–28. [Google Scholar]
- Friis, H.T. A Note on a Simple Transmission Formula. Proc. IRE 1946, 34, 254–256. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A.D. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Hoppensteadt, F.C.; Izhikevich, E.M. Synaptic organizations and dynamical properties of weakly connected neural oscillators. II. Learning phase information. Biol. Cybern. 1996, 75, 117–127. [Google Scholar] [CrossRef] [PubMed]
- Yumin, Z.; Xueshan, H.; Ming, Y.; Mingqiang, W.; Li, Z.; Pingfeng, Y.E.; Bo, X.U. Distributionally Robust Unit Commitment Based on Imprecise Dirichlet Model. In Proceedings of the CSEE 2019, Fredricton, NB, Canada, 18–21 August 2019. [Google Scholar]
- Statnikov, A.; Hardin, D.; Guyon, I.; Aliferis, C.F. A Gentle Introduction to Support Vector Machines in Biomedicine; World Scientific Publishing Co., Pte Ltd.: Singapore, 2011. [Google Scholar]
- Impinj. Speedway RAIN RFID Readers. 2020. Available online: https://www.impinj.com/products/readers/impinj-speedway (accessed on 7 June 2023).
- Liu, T.; Yang, L.; Lin, Q.; Guo, Y.; Liu, Y. Anchor-free backscatter positioning for RFID tags with high accuracy. In Proceedings of the Infocom 2014, Toronto, ON, Canada, 27 April–2 May 2014. [Google Scholar]
- Yang, L.; Chen, Y.; Li, X.Y.; Xiao, C.; Liu, Y. Tagoram: Real-time tracking of mobile RFID tags to high precision using COTS devices. In Proceedings of the 20th Annual International Conference on Mobile Computing and Networking, Maui, HI, USA, 7–11 September 2014. [Google Scholar]
- Di Giampaolo, E.; Martinelli, F. Mobile Robot Localization Using the Phase of Passive UHF RFID Signals. IEEE Trans. Ind. Electron. 2014, 61, 365–376. [Google Scholar] [CrossRef]
- Chum, O.; Matas, J. Optimal Randomized RANSAC. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 1472–1482. [Google Scholar] [CrossRef] [PubMed]






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Apparatus | Features |
|---|---|---|
| Reader | Impinj | Stable reading and writing performance |
| Antenna | 9 dBi circular polarization reader antenna | Uniform waveform range |
| RFID tags | UHF 915 Mhz electronic tag | Anti–pollution and durable |
| Parameters | Parameter Value |
|---|---|
| Reader Power | 27 dBm |
| Frequency | 902~928 MHz |
| Data acquisition interval | 10 s |
| Robot Speed | 0.5 m/s |
| Inventory method | Asynchronous Inventory |
| Algorithm Parameters | Parameter Description |
|---|---|
| time (The RSSI of tags that have not been read is uniformly set to −80.) | |
| times. | |
| The threshold for determining whether the mean of the RSSI values of tags has changed. | |
| The threshold for dividing tags from the main tag group | |
| Sub–tag group with a quantity of “a” divided from the main tag group | |
| The distance of tag group perception | |
| is further divided using the Algorithm |
| Tag Group Density | Model Prediction Accuracy |
|---|---|
| 50 | 97% |
| 100 | 95% |
| 150 | 91% |
| Average accuracy | 94.333% |
| Algorithm | Time (s) |
|---|---|
| Tag group distance perception | 0.651 s |
| Tag group orientation perception | 1.34 s |
| Single–Tag distance Perception | 5.34 s |
| Ref. | Localization Algorithm | Accuracy | Range | Scenario | Time Consumption |
|---|---|---|---|---|---|
| [15] | RSSI, BKNN | About 15 cm | 3.8 m × 4.8 m | Static | Normal |
| [16] | RSSI, PSO–SVR | About 12 cm | 8 m × 8 m | Simulation experiment | Low |
| [17] | Phase, SAR | Centimeter–level | 8 m × 6 m | Dynamic | High |
| [18] | Phase difference | 22 cm | 2.4 m × 2.4 m | Static | Normal |
| [19] | Phase, camera | 3D 25 cm | 1.4 m × 1.2 m | Dynamic | Normal |
| [20] | Phase difference, SAR | 3D 2.3 cm | 2 m × 2 m | Dynamic | Normal |
| The proposed method | RSSI, SoI, GWO–MLP | 50 cm | 6 m × 6 m | Dynamic | Low |
| RSSI, Phase, SVR–RANSAC | About 3 cm | 1.5 m × 1.5 m | Dynamic | High |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Zhang, Y.; Li, S.; Huang, Q.; Pan, R.; Pang, S.; Yang, J. An Indoor Tags Position Perception Method Based on GWO–MLP Algorithm for RFID Robot. Electronics 2023, 12, 4076. https://doi.org/10.3390/electronics12194076
Wang H, Zhang Y, Li S, Huang Q, Pan R, Pang S, Yang J. An Indoor Tags Position Perception Method Based on GWO–MLP Algorithm for RFID Robot. Electronics. 2023; 12(19):4076. https://doi.org/10.3390/electronics12194076
Chicago/Turabian StyleWang, Honggang, Yu Zhang, Sicheng Li, Qinyan Huang, Ruoyu Pan, Shengli Pang, and Jingfeng Yang. 2023. "An Indoor Tags Position Perception Method Based on GWO–MLP Algorithm for RFID Robot" Electronics 12, no. 19: 4076. https://doi.org/10.3390/electronics12194076