
Research on Pattern Recognition Method for φ-OTDR System Based on Dendrite Net
Abstract
:1. Introduction
- (1)
- In this study, we proposed a novel algorithm for updating the weight matrix in the DD network using the VTTCG algorithm. We conducted experiments to verify the high feasibility and accuracy of the proposed model.
- (2)
- The proposed algorithm has been demonstrated to outperform other classical pattern recognition methods in terms of recognition accuracy for vibration events in the φ-OTDR system.
2. Related Work
2.1. Introduction of DD
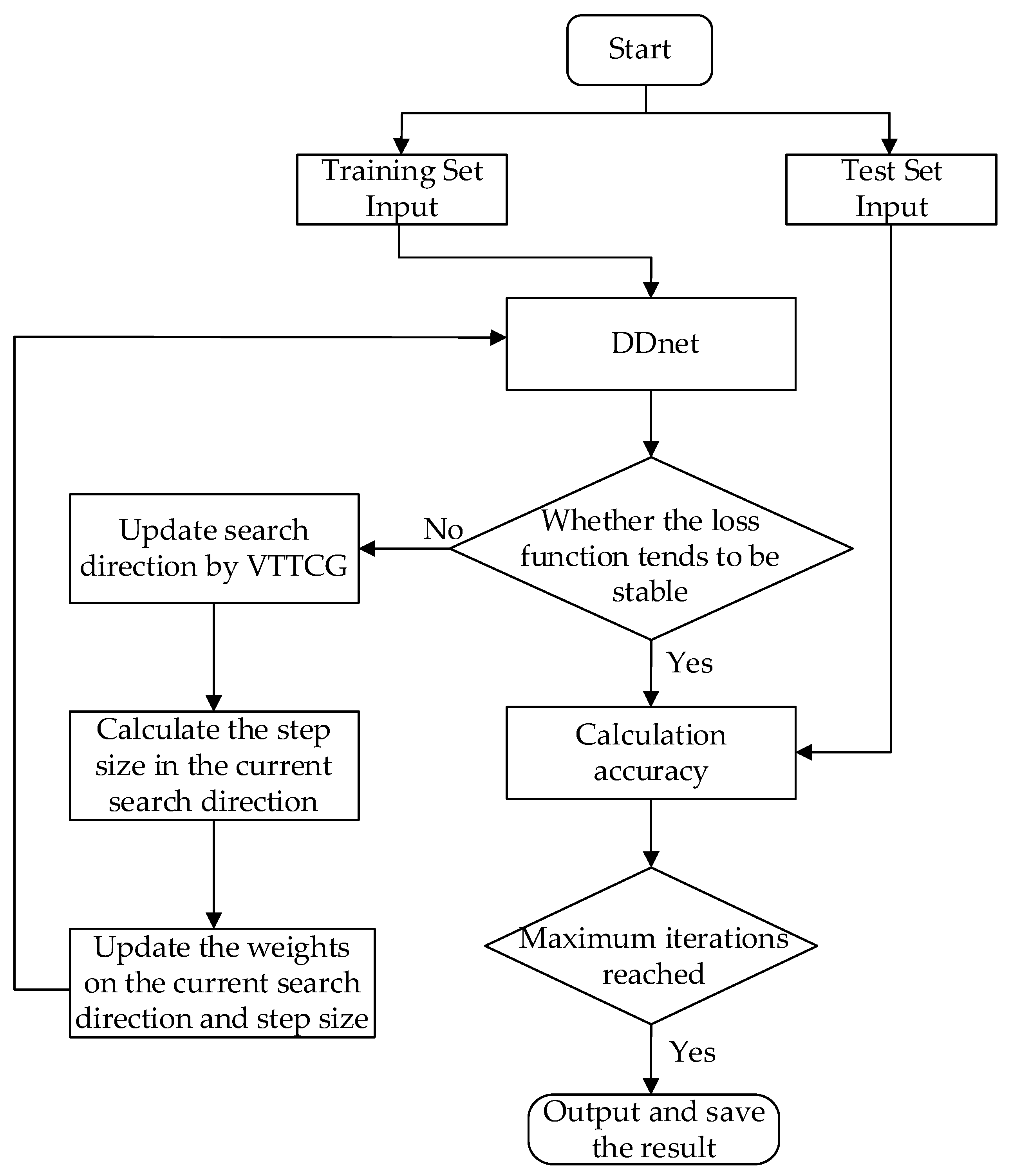
2.2. Variable Three-Term Conjugate Gradient Method for Optimizing DD
3. Experiment
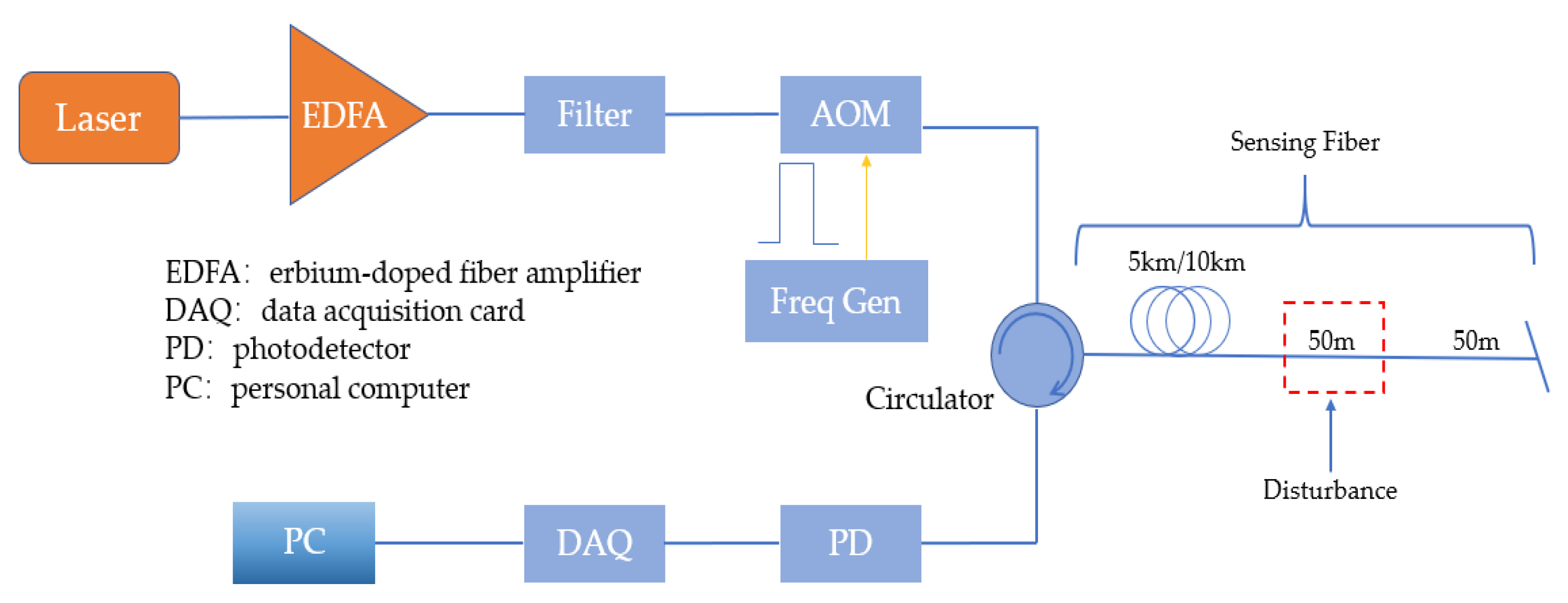
3.1. The Structure of φ-OTDR
3.2. Data Preprocessing
3.3. Experiment System
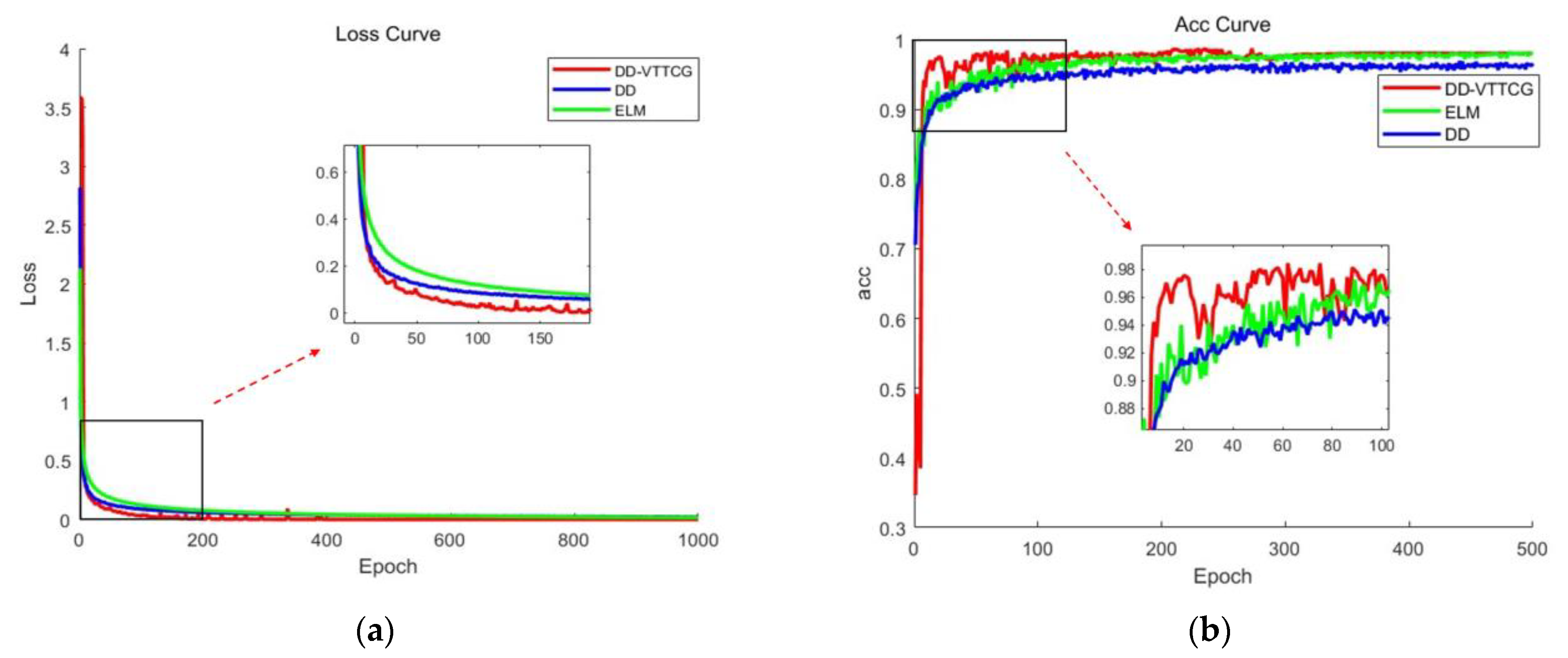
3.4. Experimental Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tu, G.; Yu, B.; Zhen, S.; Qian, K.; Zhang, X. Enhancement of signal identification and extraction in a Φ-OTDR vibration sensor. IEEE Photonics J. 2017, 9, 1–10. [Google Scholar] [CrossRef]
- Zhu, F.; Zhang, Y.; Xia, L.; Wu, X.; Zhang, X. Improved Φ-OTDR sensing system for high-precision dynamic strain measurement based on ultra-weak fiber Bragg grating array. J. Light. Technol. 2015, 33, 4775–4780. [Google Scholar]
- Mei, X.; Pang, F.; Liu, H.; Yu, G.; Shao, Y.; Qian, T.; Mou, C.; Lv, L.; Wang, T. Fast coarse-fine locating method for φ-OTDR. Opt. Express 2018, 26, 2659–2667. [Google Scholar] [CrossRef] [PubMed]
- Wu, H.; Liu, X.; Xiao, Y.; Rao, Y. A dynamic time sequence recognition and knowledge mining method based on the hidden Markov models (HMMs) for pipeline safety monitoring with Φ-OTDR. J. Light. Technol. 2019, 37, 4991–5000. [Google Scholar] [CrossRef]
- Hu, Y.; Meng, Z.; Ai, X.; Li, H.; Hu, Y.; Zhao, H. Hybrid Feature extraction of pipeline microstates based on Φ-OTDR sensing system. J. Control Sci. Eng. 2019, 2019, 6087582. [Google Scholar] [CrossRef]
- Ding, Z.-W.; Zhang, X.-P.; Zou, N.-M.; Xiong, F.; Song, J.-Y.; Fang, X.; Wang, F.; Zhang, Y.-X. Phi-OTDR based on-line monitoring of overhead power transmission line. J. Light. Technol. 2021, 39, 5163–5169. [Google Scholar] [CrossRef]
- Juarez, J.C.; Taylor, H.F. Field test of a distributed fiber-optic intrusion sensor system for long perimeters. Appl. Opt. 2007, 46, 1968–1971. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Sun, Z.; Shan, Y.; Li, Y.; Wang, F.; Zeng, J.; Zhang, Y. A high performance distributed optical fiber sensor based on Φ-OTDR for dynamic strain measurement. IEEE Photonics J. 2017, 9, 1–12. [Google Scholar] [CrossRef]
- Martins, H.F.; Martin-Lopez, S.; Corredera, P.; Ania-Castañon, J.D.; Frazão, O.; Gonzalez-Herraez, M. Distributed vibration sensing over 125 km with enhanced SNR using phi-OTDR over a URFL cavity. J. Light. Technol. 2015, 33, 2628–2632. [Google Scholar] [CrossRef]
- Marcon, L.; Soto, M.A.; Soriano-Amat, M.; Costa, L.; Martins, H.F.; Palmieri, L.; Gonzalez-Herraez, M. Boosting the spatial resolution in chirped pulse ϕ-OTDR using sub-band processing. In Proceedings of the Seventh European Workshop on Optical Fibre Sensors, Limassol, Cyprus, 1–4 October 2019; pp. 295–298. [Google Scholar]
- Yan, Q.; Tian, M.; Li, X.; Yang, Q.; Xu, Y. Coherent φ-OTDR based on polarization-diversity integrated coherent receiver and heterodyne detection. In Proceedings of the 2017 25th Optical Fiber Sensors Conference (OFS), Jeju, Republic of Korea, 24–28 April 2017; pp. 1–4. [Google Scholar]
- Juarez, J.C.; Maier, E.W.; Choi, K.N.; Taylor, H.F. Distributed fiber-optic intrusion sensor system. J. Light. Technol. 2005, 23, 2081–2087. [Google Scholar] [CrossRef]
- Liang, S.; Sheng, X.; Lou, S.; Feng, Y.; Zhang, K. Combination of phase-sensitive OTDR and michelson interferometer for nuisance alarm rate reducing and event identification. IEEE Photonics J. 2016, 8, 1–12. [Google Scholar] [CrossRef]
- He, H.; Shao, L.-Y.; Luo, B.; Li, Z.; Zou, X.; Zhang, Z.; Pan, W.; Yan, L. Multiple vibrations measurement using phase-sensitive OTDR merged with Mach-Zehnder interferometer based on frequency division multiplexing. Opt. Express 2016, 24, 4842–4855. [Google Scholar] [CrossRef]
- Kandamali, D.F.; Cao, X.; Tian, M.; Jin, Z.; Dong, H.; Yu, K. Machine learning methods for identification and classification of events in ϕ-OTDR systems: A review. Appl. Opt. 2022, 61, 2975–2997. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Wu, H.; Liu, X.; Xiao, Y.; Wang, M.; Yang, M.; Rao, Y. A real-time distributed deep learning approach for intelligent event recognition in long distance pipeline monitoring with DOFS. In Proceedings of the 2018 International Conference on Cyber-Enabled Distributed Computing and Knowledge Discovery (CyberC), Zhengzhou, China, 18–20 October 2018; pp. 290–2906. [Google Scholar]
- Xu, C.; Guan, J.; Bao, M.; Lu, J.; Ye, W. Pattern recognition based on time-frequency analysis and convolutional neural networks for vibrational events in φ-OTDR. Opt. Eng. 2018, 57, 016103. [Google Scholar] [CrossRef]
- Wang, X.; Liu, Y.; Liang, S.; Zhang, W.; Lou, S. Event identification based on random forest classifier for Φ-OTDR fiber-optic distributed disturbance sensor. Infrared Phys. Technol. 2019, 97, 319–325. [Google Scholar] [CrossRef]
- Chen, X.; Xu, C. Disturbance pattern recognition based on an ALSTM in a long-distance φ-OTDR sensing system. Microw. Opt. Technol. Lett. 2020, 62, 168–175. [Google Scholar] [CrossRef]
- Shi, Y.; Wang, Y.; Wang, L.; Zhao, L.; Fan, Z. Multi-event classification for Φ-OTDR distributed optical fiber sensing system using deep learning and support vector machine. Optik 2020, 221, 165373. [Google Scholar] [CrossRef]
- Abufana, S.A.; Dalveren, Y.; Aghnaiya, A.; Kara, A. Variational mode decomposition-based threat classification for fiber optic distributed acoustic sensing. IEEE Access 2020, 8, 100152–100158. [Google Scholar] [CrossRef]
- Wang, Z.; Lou, S.; Liang, S.; Sheng, X. Multi-class disturbance events recognition based on EMD and XGBoost in φ-OTDR. IEEE Access 2020, 8, 63551–63558. [Google Scholar] [CrossRef]
- Wang, M.; Feng, H.; Qi, D.; Du, L.; Sha, Z. φ-OTDR pattern recognition based on CNN-LSTM. Optik 2023, 272, 170380. [Google Scholar] [CrossRef]
- Liu, G.; Wang, J. Dendrite net: A white-box module for classification, regression, and system identification. IEEE Trans. Cybern. 2021, 52, 13774–13787. [Google Scholar] [CrossRef] [PubMed]
- Kim, H.; Wang, C.; Byun, H.; Hu, W.; Kim, S.; Jiao, Q.; Lee, T.H. Variable three-term conjugate gradient method for training artificial neural networks. Neural Netw. 2023, 159, 125–136. [Google Scholar] [CrossRef] [PubMed]
- Cao, X.; Su, Y.; Jin, Z.; Yu, K. An open dataset of φ-OTDR events with two classification models as baselines. Results Opt. 2023, 10, 100372. [Google Scholar] [CrossRef]
- Zhang, M.; Li, Y.; Chen, J.; Song, Y.; Zhang, J.; Wang, M. Event detection method comparison for distributed acoustic sensors using φ-OTDR. Opt. Fiber Technol. 2019, 52, 101980. [Google Scholar] [CrossRef]
- Xu, C.; Guan, J.; Bao, M.; Lu, J.; Ye, W. Pattern recognition based on enhanced multifeature parameters for vibration events in φ-OTDR distributed optical fiber sensing system. Microw. Opt. Technol. Lett. 2017, 59, 3134–3141. [Google Scholar] [CrossRef]
- Liu, G. It may be time to improve the neuron of artificial neural network. TechRxiv Prepr. 2021, 7–21. [Google Scholar] [CrossRef]
- Mangasarian, O.L. A finite Newton method for classification. Optim. Methods Softw. 2002, 17, 913–929. [Google Scholar] [CrossRef]
- Berahas, A.S.; Nocedal, J.; Takác, M. A multi-batch L-BFGS method for machine learning. Adv. Neural Inf. Process. Syst. 2016, 29. [Google Scholar] [CrossRef]
- Tran, P.T. On the convergence proof of amsgrad and a new version. IEEE Access 2019, 7, 61706–61716. [Google Scholar] [CrossRef]
- Bock, S.; Goppold, J.; Weiß, M. An improvement of the convergence proof of the ADAM-Optimizer. arXiv 2018, arXiv:1804.10587. [Google Scholar]
- Bhattacharya, S.; Maddikunta, P.K.R.; Kaluri, R.; Singh, S.; Gadekallu, T.R.; Alazab, M.; Tariq, U. A novel PCA-firefly based XGBoost classification model for intrusion detection in networks using GPU. Electronics 2020, 9, 219. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Even Type | Sample Size | Event Label |
|---|---|---|
| Background | 3094 | 0 |
| Digging | 2512 | 1 |
| Knocking | 2530 | 2 |
| Watering | 2298 | 3 |
| Shaking | 2728 | 4 |
| Walking | 2450 | 5 |
| Label | Precison | Recall | F1-Score | Test Set | Misclassified Samples |
|---|---|---|---|---|---|
| 0 | 0.99 | 0.88 | 0.93 | 619 | 1 |
| 1 | 0.80 | 0.80 | 0.80 | 502 | 98 |
| 2 | 0.90 | 0.95 | 0.92 | 506 | 49 |
| 3 | 0.80 | 0.98 | 0.88 | 471 | 93 |
| 4 | 0.99 | 0.93 | 0.96 | 546 | 6 |
| 5 | 0.87 | 0.88 | 0.87 | 490 | 66 |
| Optimized DD | Original DD | ELM | SVM |
|---|---|---|---|
| 98.6% | 91.2% | 97.5% | 90.0% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Yang, C.; Yu, H.; Hou, G. Research on Pattern Recognition Method for φ-OTDR System Based on Dendrite Net. Electronics 2023, 12, 3757. https://doi.org/10.3390/electronics12183757
Chen X, Yang C, Yu H, Hou G. Research on Pattern Recognition Method for φ-OTDR System Based on Dendrite Net. Electronics. 2023; 12(18):3757. https://doi.org/10.3390/electronics12183757
Chicago/Turabian StyleChen, Xiaojuan, Cheng Yang, Haoyu Yu, and Guangwei Hou. 2023. "Research on Pattern Recognition Method for φ-OTDR System Based on Dendrite Net" Electronics 12, no. 18: 3757. https://doi.org/10.3390/electronics12183757