2.1.1. Ionospheric Scintillation Environment Simulation
The occurrence of ionospheric anomalies is intricately linked to the solar activity intensity and the solar activity cycle’s peak. Consequently, irregular electron density variations manifest within the ionosphere, giving rise to irregular plasma structures. When satellite signals traverse the ionospheric region, characterized by irregular plasma structures, the likelihood of encountering ionospheric scintillation phenomena increases [
15].
In an ionospheric scintillation environment, the phase and amplitude of GNSS signals undergo random variations, causing disruptions to the pseudo-range and carrier-to-noise ratio of the satellites. Accurately modeling the ionospheric scintillation environment, therefore, necessitates obtaining precise information regarding the variations in the phase and amplitude of these signals. However, owing to the sudden and unpredictable nature of ionospheric scintillation, acquiring reliable real-world data poses significant challenges.
To address this issue, the present study employs the Cornell model to simulate ionospheric amplitude and phase scintillation sequences under different levels of ionospheric scintillation intensity [
16]. By utilizing this modeling approach, this paper effectively replicates variations in the pseudo-range and carrier-to-noise ratio of satellites within the simulated ionospheric environment.
To quantitatively evaluate the intensity of ionospheric scintillation, it is common practice to utilize both an amplitude scintillation index and a phase scintillation index. The amplitude scintillation is typically assessed by utilizing the
[
17], which measures the standard deviation of the normalized received signal power.
In Equation (
1),
is the power of the received signal. The higher the ionospheric scintillation intensity, the more severe the attenuation of the signal and the higher the value of
. The magnitude of the phase scintillation is indicated by the phase scintillation index
, which mainly describes the jump in the phase of the electromagnetic wave and represents the standard deviation of the received signal phase.
indicates the carrier phase of the received signal. The Cornell model assumes that the ionospheric scintillation amplitude sequence follows a Nakagami-n distribution and the phase sequence follows a Gaussian distribution [
18].
In Equation (
3),
is the amplitude variation of the satellite signal under the influence of ionospheric scintillation and
K is the Rician distribution parameter, which is related to
in Equation (
4). As the
changes, it affects the parameter
K, which in turn leads to different probability density functions for various magnitude flicker sizes.
is the mean value of the signal strength, and
is the Bessel function. In Equation (
5),
is the carrier phase variation of the satellite signal under the influence of ionospheric scintillation, and
represents the magnitude of the phase scintillation index. As
varies, it results in different phase probability densities.
The model represents the ionospheric scintillation signal as a combination of a deterministic or direct component and a stochastic or random multi-path component.
In Equation (
6),
indicates the direct component, and
denotes the random multi-path component. The random multi-path component is generated using a second-order Butterworth filter. The choice of the second-order Butterworth filter is based on the observation that its amplitude–frequency characteristics closely resemble the amplitude–frequency characteristics of the flicker present in actual data. The autocorrelation function of this second-order Butterworth filter can be expressed as
In Equation (
7), the amplitude–frequency characteristics of the scintillation signal and the second-order Butterworth are close to those of the scintillation in order to simulate the scintillation signal, where the parameter
ensures that
.
indicates the decorrelation time. By manipulating the autocorrelation function of the second-order Butterworth filter, the flicker frequency is determined by the magnitude of
, with smaller
resulting in larger flicker frequencies. The second-order Butterworth’s magnitude response function can be expressed as
where
is the second order Butterworth cut-off frequency,
. The direct component of the model can be obtained from the parameter
K of the Rician distribution, which is related to the direct component by
where
, and
is the second-order Butterworth’s autocorrelation function taken at 0.
Figure 2 shows that the Cornell model utilizes the decorrelation time
and the amplitude flicker index
as its input parameters. The size of
determines the characteristics of the Rician distribution, while the direct component of the Cornell model is determined by the parameter
K. To obtain the desired random component, the cut-off frequency of the second-order Butterworth filter is controlled by the decorrelation time
. The direct and random components are then summed and normalized, resulting in the generation of the amplitude and phase sequences for the simulation of ionospheric scintillation.
2.1.2. Simulation of RINEX Files Based on Flight Data
The RINEX file [
19] is a widely adopted, standardized format for the exchange of data between GNSS receivers. It offers several advantages over other formats, such as its cross-platform compatibility, simple and efficient structure, and ease of readability. Within the RINEX file, the receiver stores information on the satellite signals that it receives in the form of raw observation data. This includes crucial data such as the pseudo-range, carrier-to-noise ratio, and other relevant information necessary for the simulation of the ionospheric scintillation environment.
In
Section 2.1.1, the ionospheric scintillation sequence is utilized to generate the pseudo-range and carrier-to-noise ratio values that are affected by the ionosphere. These values are then combined with the flight data, which are written in a file following a format similar to a RINEX file. This process enables the simulation of the GNSS system under various ionospheric scintillation intensities and during different flight phases.
This paper employs the flight altitude as a criterion to categorize different flight phases, which helps to simulate the RINEX file based on flight data. The following classifications are used.
Takeoff Phase: This phase is defined when the aircraft’s altitude is between 0 and 8000 m.
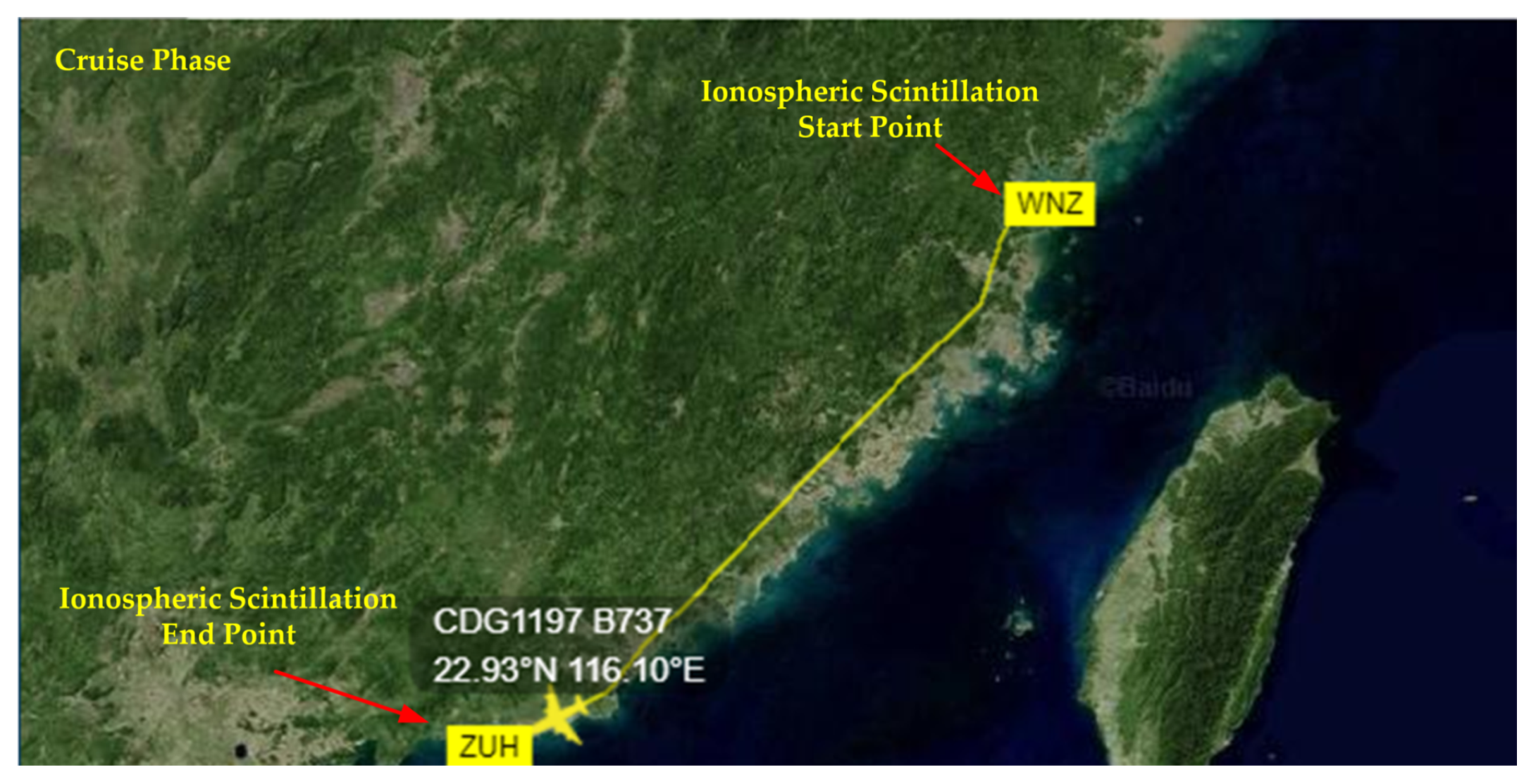
Cruise Phase: The cruise phase is associated with altitudes of 8000 m and above.
Approach Phase: When the aircraft’s altitude ranges between 1000 and 8000 m, it is considered the approach phase.
Landing Phase: The landing phase refers to altitudes below 1000 m.
These divisions align with the ICAO categorization of flight segments into route, terminal, and approach phases [
20]. By utilizing this classification, we can effectively simulate the RINEX file based on flight data, allowing for the comprehensive analysis and evaluation of GNSS performance in various flight phases.
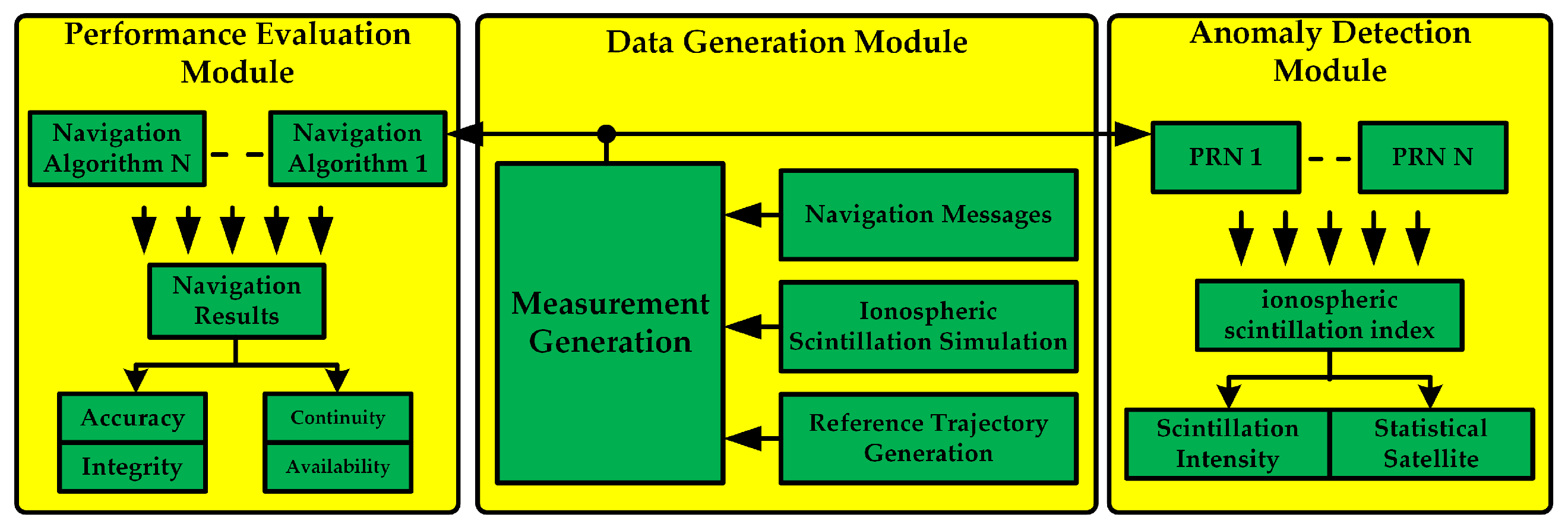
The flow of the software data generation module is shown in
Figure 3. The software first calculates the position of the current visible satellite by using ephemeris data. It then combines the flight track data to obtain the distance between the satellite and the vehicle. After correcting for the Earth’s rotation, the software determines the actual distance between the satellite and the vehicle. Using the ionospheric scintillation simulation module, the software generates the amplitude scintillation sequence and converts it into a delay to obtain the pseudo-distance information affected by the ionospheric scintillation. The simulated carrier-to-noise ratio is determined by the free loss, atmospheric loss, and receiver antenna gain. In the ideal condition, the free loss represents the maximum loss in satellite signal propagation. To calculate the residual amount of the free loss, the actual distance of the satellite is subtracted from the farthest distance of the satellite. By adding the minimum receiving strength to the residual amount of the free loss, the ideal receiver receiving strength is obtained. The ionospheric scintillation simulation module is used to obtain the phase scintillation sequences. Finally, the software combines the phase scintillation sequence and the ionospheric scintillation simulation module to determine the carrier-to-noise ratio of the satellite under ionospheric scintillation.



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}