
An Innovative Electromechanical Joint Approach for Contact Pair Fault Diagnosis of Oil-Immersed On-Load Tap Changer


Abstract
:1. Introduction
- (1)
- The combination of mechanical vibration signals and high-frequency current signals for OLTC contact fault diagnosis.
- (2)
- The establishment of an experimental platform to collect comprehensive signal data.
- (3)
- The application of WPT for denoising and correlation analysis to explore the relationships between signals.
- (4)
- The utilization of EEMD and HHT for feature extraction and analysis, and the use of SVM for joint analysis and classification of signals, enabling accurate fault diagnosis.
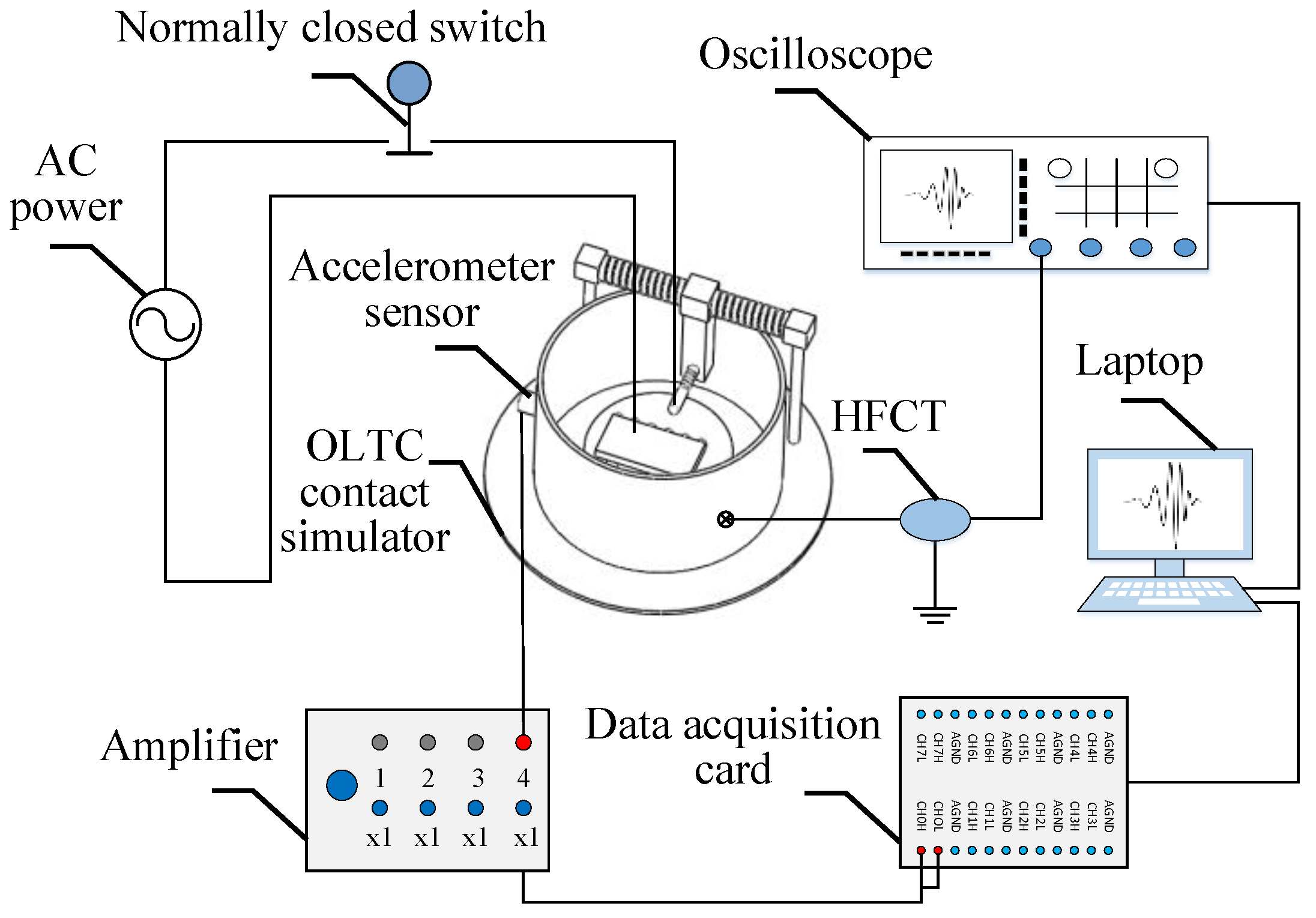
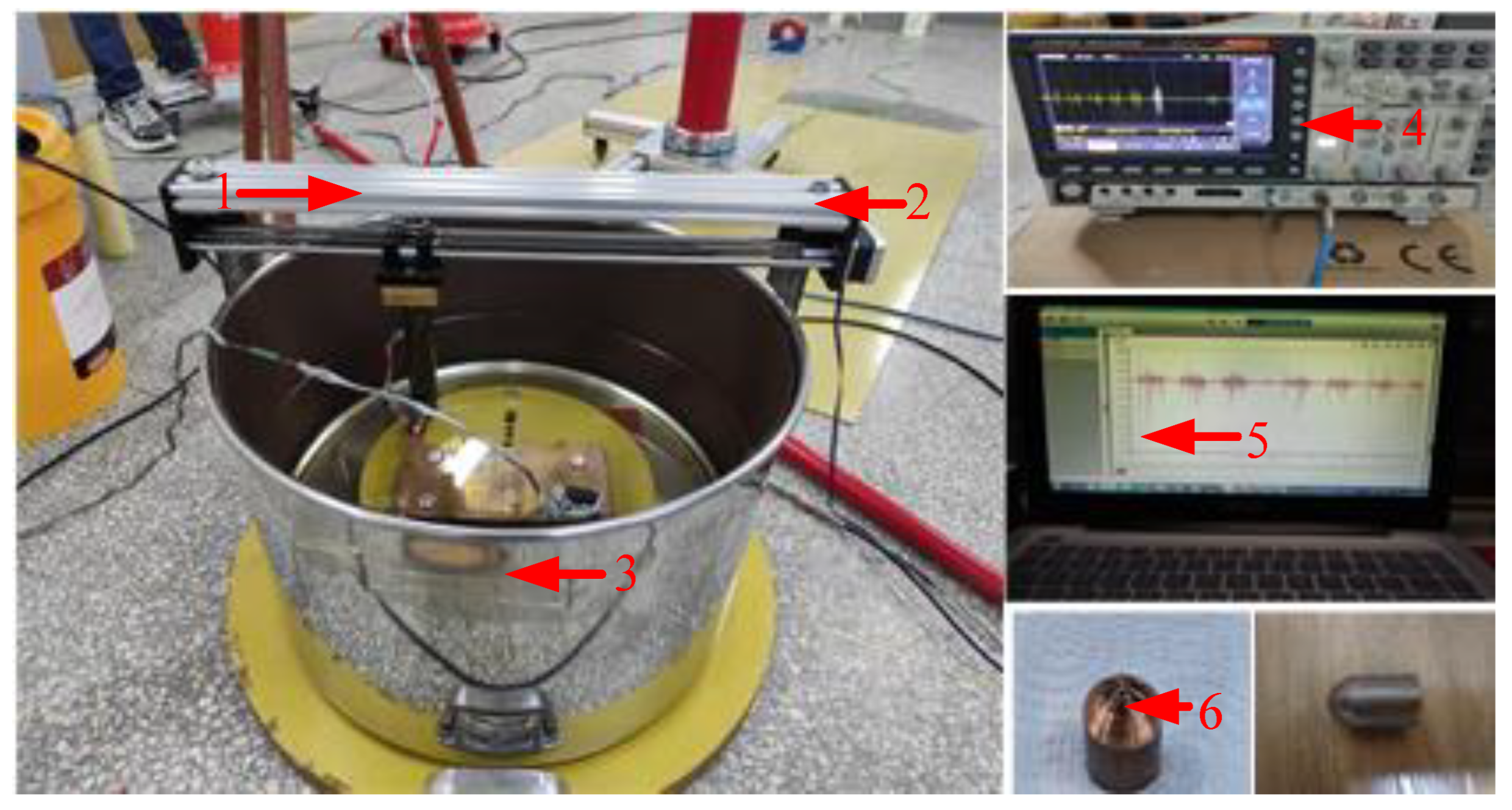
2. Experimental Setup
- (1)
- A contact switching device.
- (2)
- A data acquisition system.
3. Signal Acquisition and Preprocessing
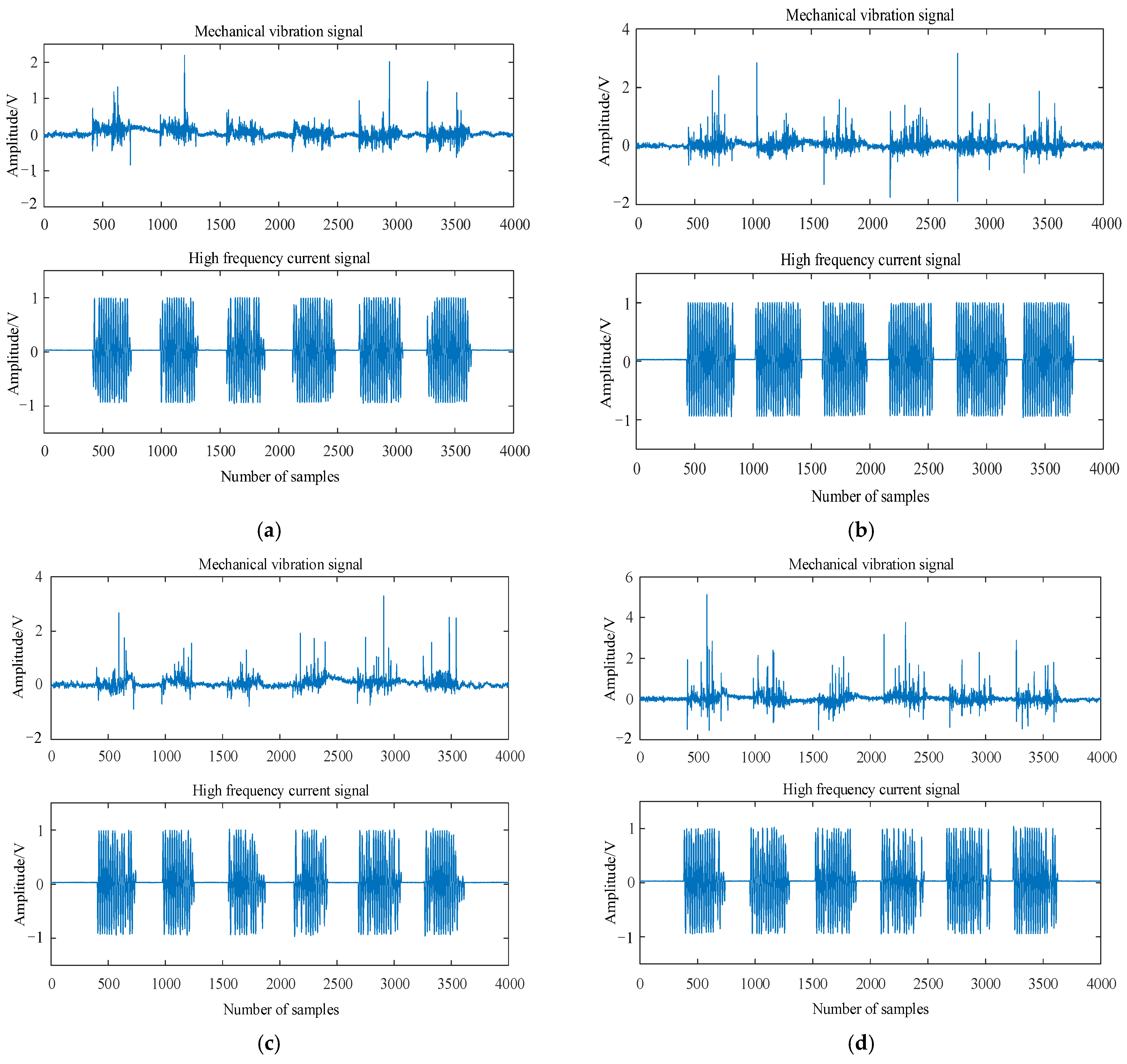
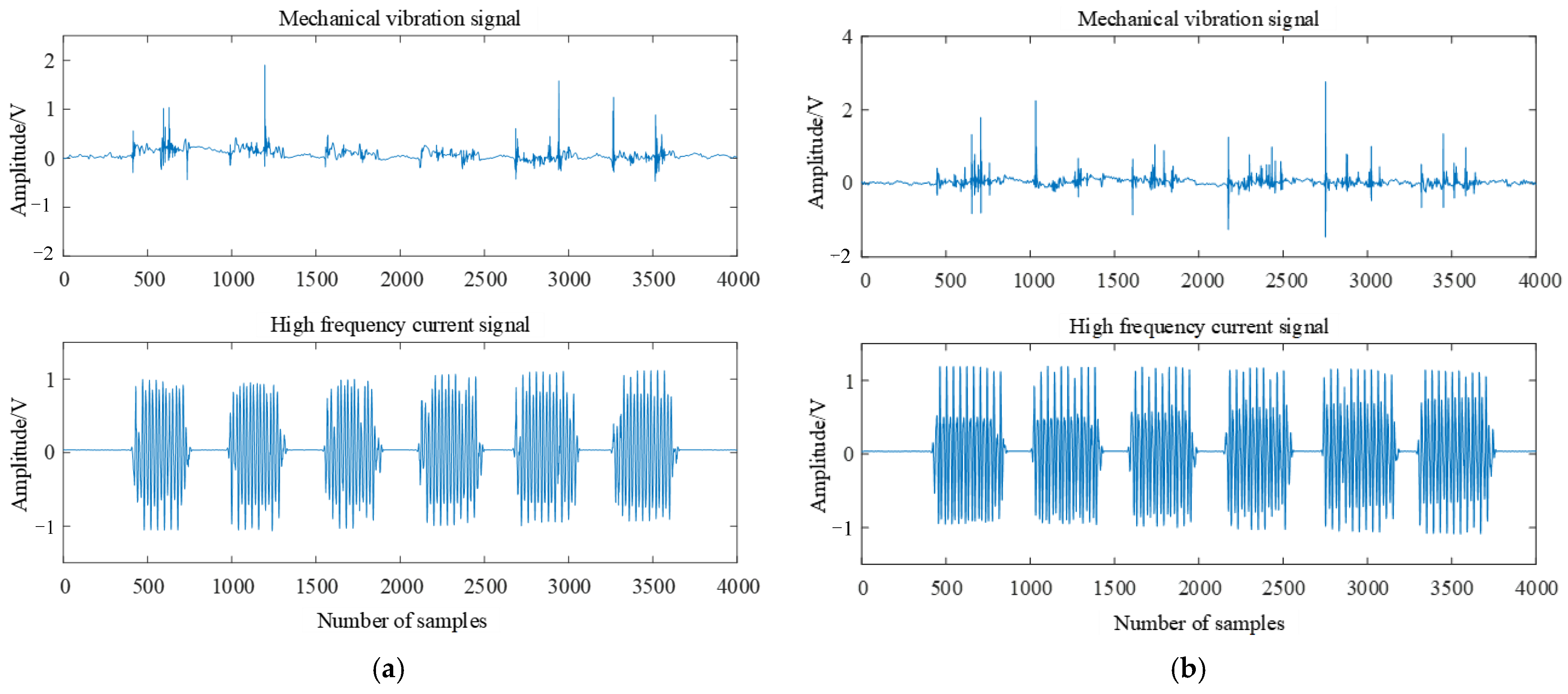
3.1. Signal Acquisition
3.2. Signal Preprocessing
3.3. Relevance Analysis
4. Signal Feature Exaction
4.1. EEMD-Based Signal Decomposition
4.2. HT-Based Signal Feature Extraction
5. Result Analysis and Discussion
5.1. Analysis of Generation and Propagation Process of Electromechanical Signal
5.2. OLTC Contact Fault Classification Based on SVM
6. Conclusions and Future Work
- (1)
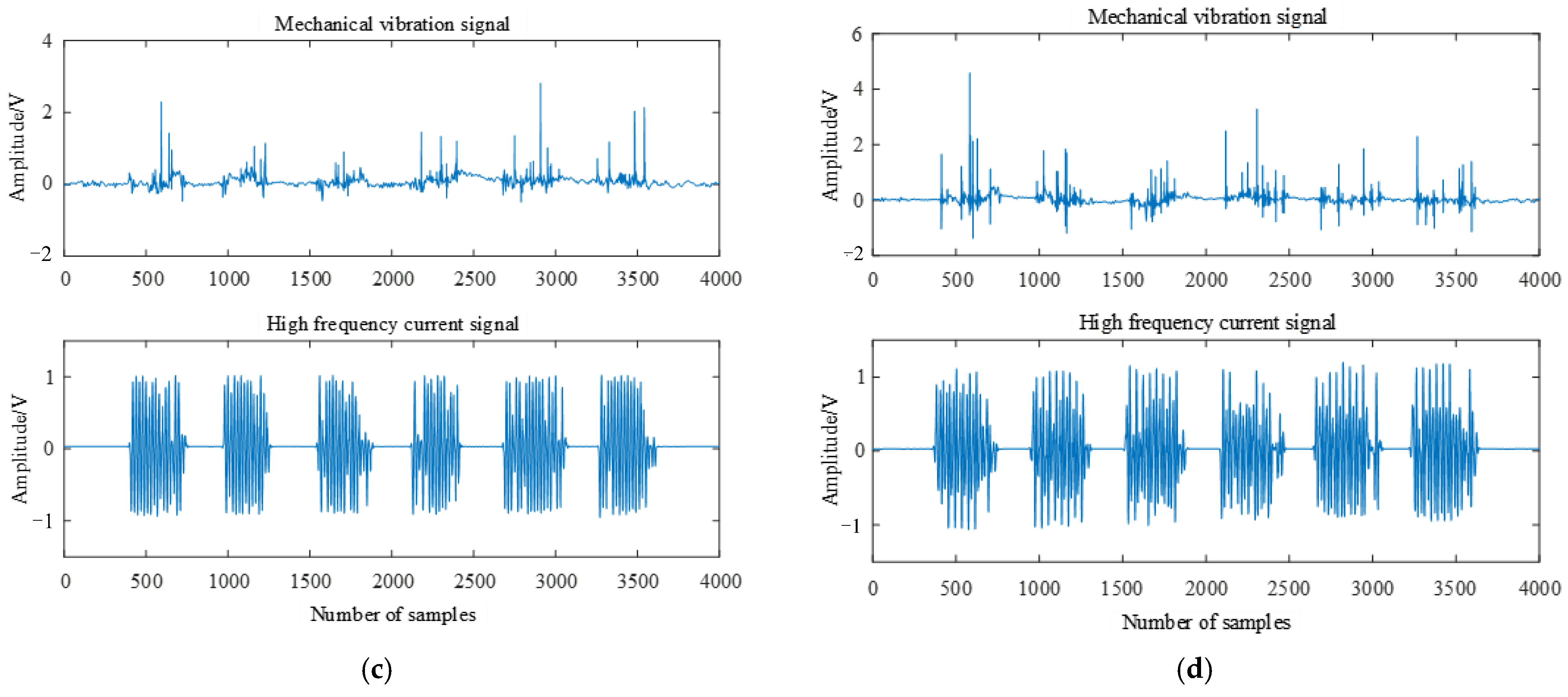
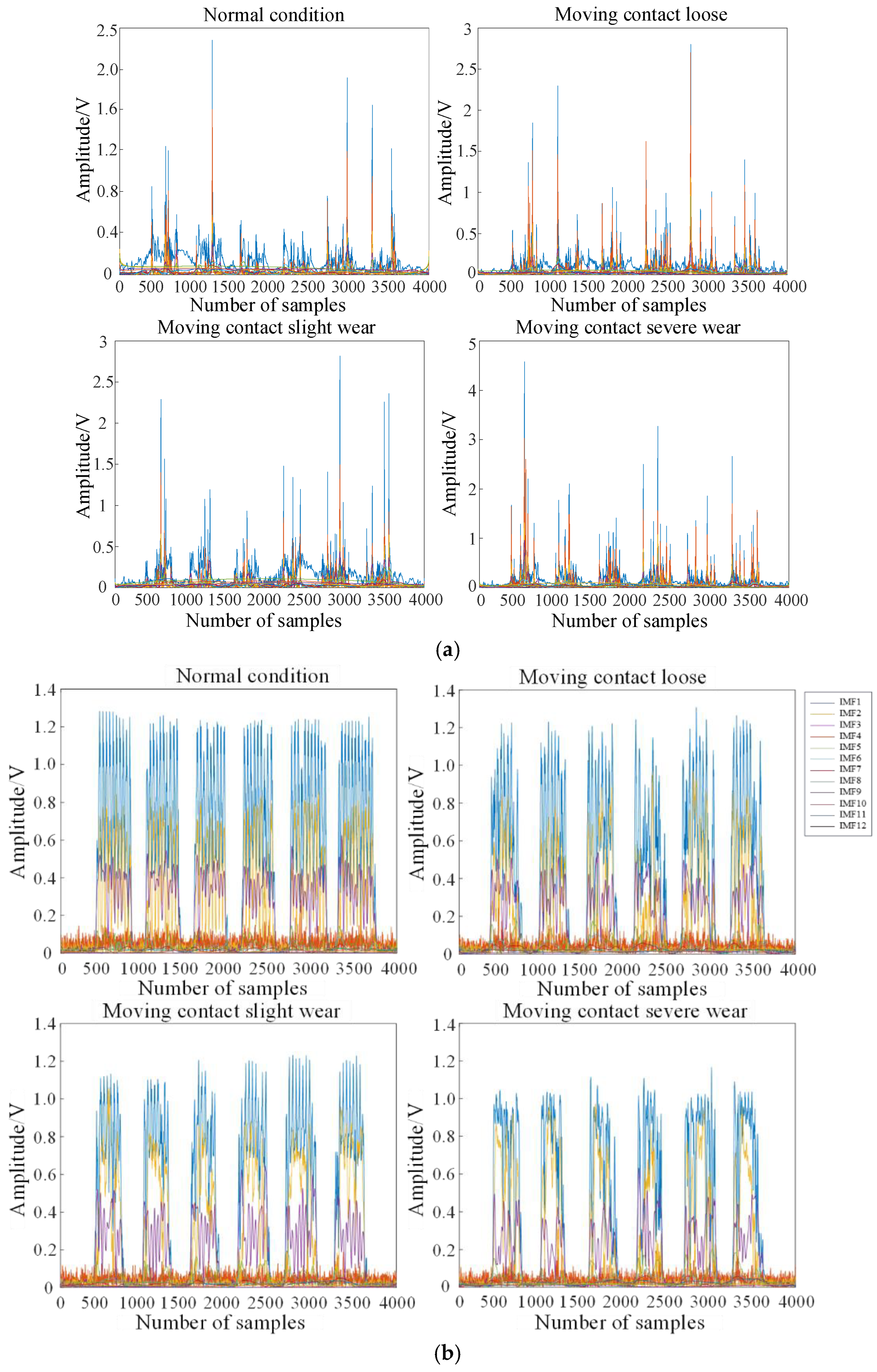
- As the OLTC contact transitioned from a normal state to a fault state, the amplitude of the mechanical vibration signal gradually increased, while the characteristic components of the high-frequency current signal gradually diminished.
- (2)
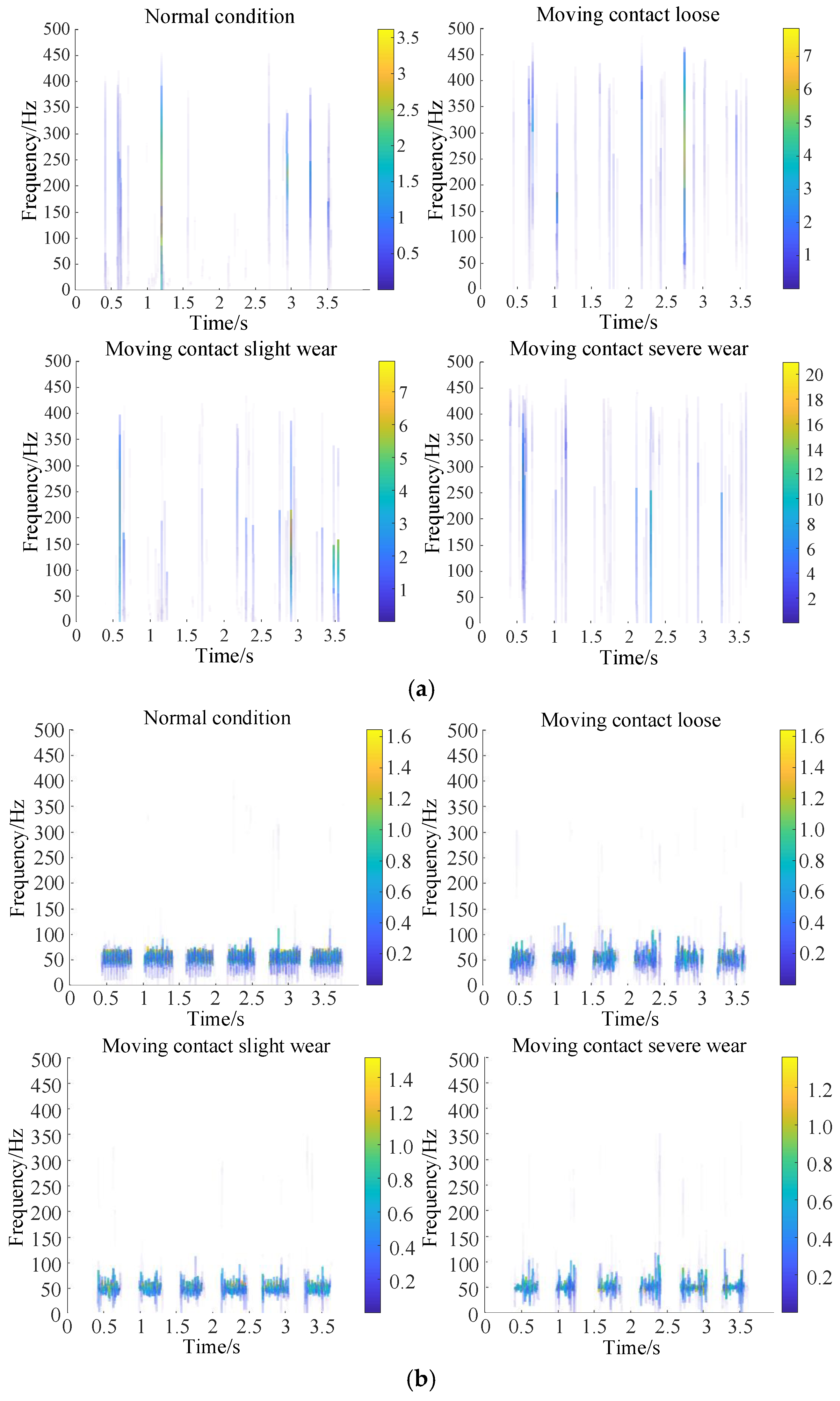
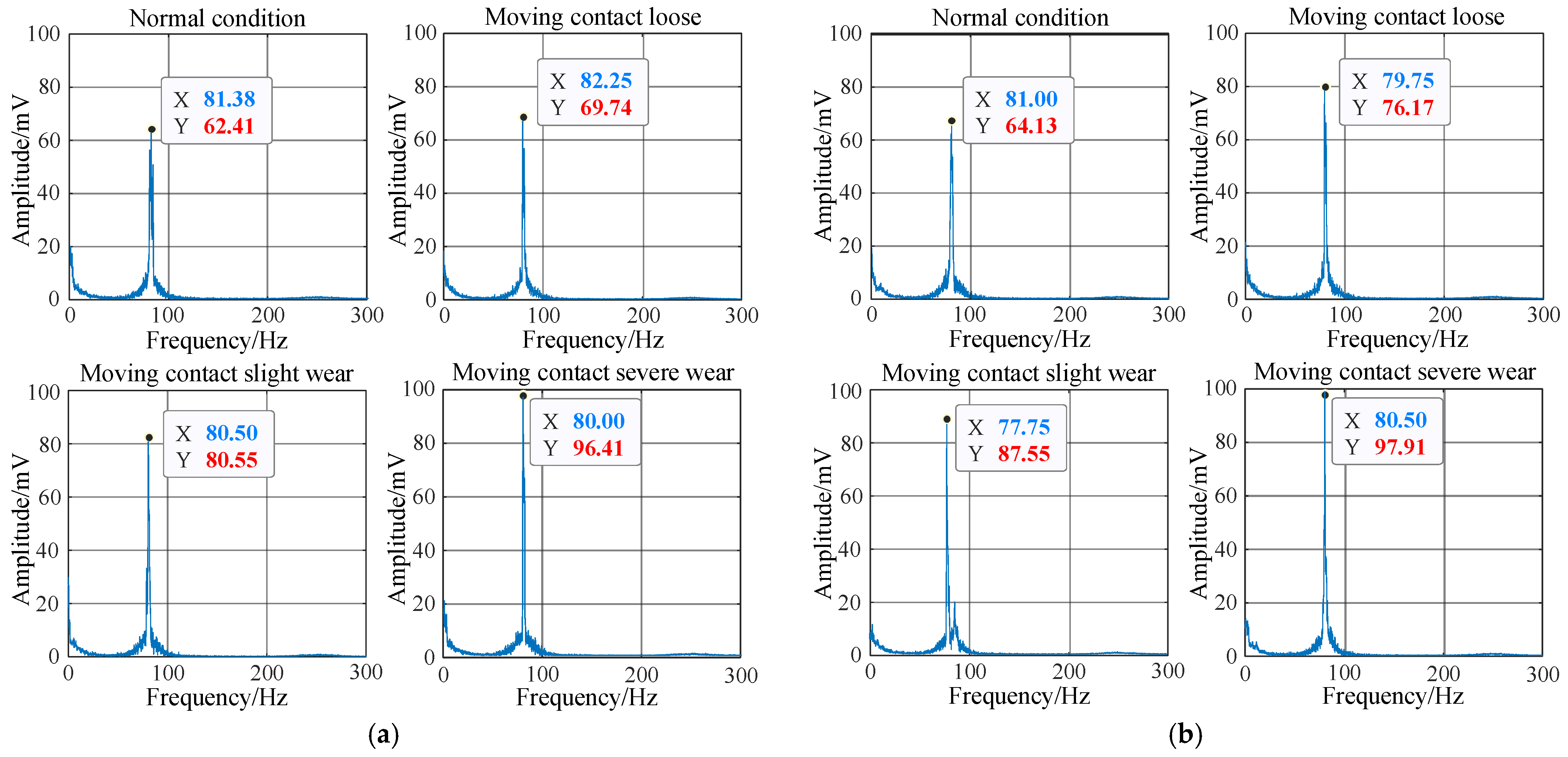
- Analysis of the Hilbert time–frequency spectrum and Hilbert marginal spectrum demonstrated that the frequency range of the mechanical vibration signal was mainly concentrated between 0 and 450 Hz when the OLTC contact progressed from a normal state to a fault state. Additionally, the energy corresponding to the frequency of the mechanical vibration signal gradually increased. Similarly, the frequency range of the high-frequency current signal was primarily between 0 and 100 Hz, exhibiting an increase in energy amplitude as well.
- (3)
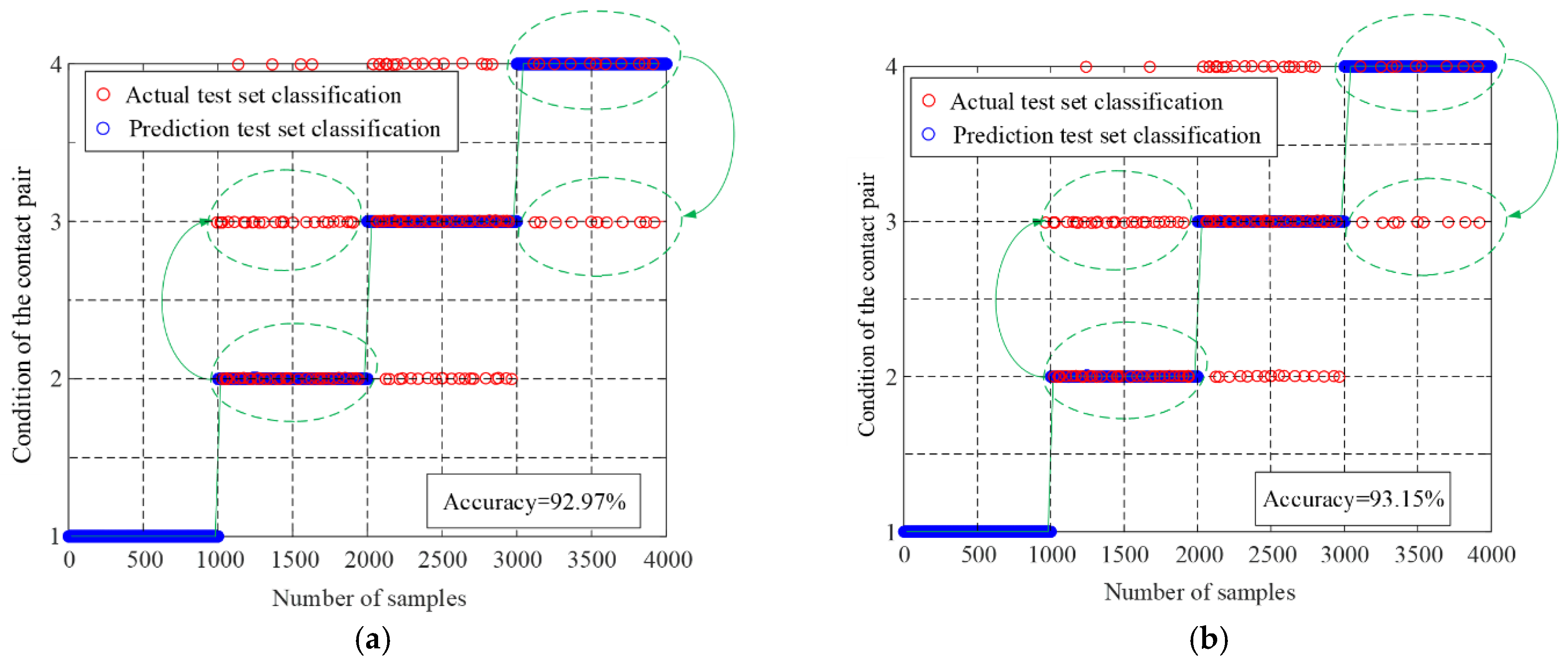
- The results obtained from classifying OLTC contact faults indicate that electromechanical joint diagnosis enables a more comprehensive analysis of the contact’s condition. Furthermore, when utilizing the SVM algorithm, the classification outcomes exhibited high accuracy with error rates below 10%. These findings provide substantial evidence supporting the feasibility and effectiveness of the electromechanical joint diagnosis method.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, C.; Zhao, T.; Sun, Y.; Wang, X.; Cao, S. Dynamic behaviour of a suspended bubble and its influence on the distribution of electric fields in insulating oil of an on-load tap-changer within power transformers. Int. J. Electr. Power Energy Syst. 2023, 145, 108680. [Google Scholar] [CrossRef]
- Liu, J.; Yu, S.; Chen, P.; Wang, F.; Ma, X.; Hu, X.; Qian, Y. Fault identification of energy storage spring of on-load tap-changer of transformer based on cluster analysis. High Volt. Appar. 2020, 56, 159–165+172. [Google Scholar]
- Mostafa, E.S.; Gholamhassan, N.; Barat, G.; Shiva, G.; Rizalman, M.; Mohd, F.G. Multi-microgrid optimization and energy management under boost voltage converter with Markov prediction chain and dynamic decision algorithm. Renew Energy 2022, 201, 179–189. [Google Scholar]
- Wang, F.; Zeng, Q.; Zheng, Y.; Qian, Y. Mechanical fault diagnosis of on-load tap-changer based on Bayes estimation phase space fusion and CM-SVDD. Proc. CSEE 2020, 40, 58–368+402. [Google Scholar]
- Li, L.; Fu, X.; Cui, J.; Zhang, C.; Zhu, D.; Wu, K. Ground-penetrating radar soil layer information recognition based on envelope detection and STFT spectrum analysis. J. Geo-Inf. Sci. 2020, 22, 316–327. [Google Scholar]
- Li, K.; Li, X.; Su, L.; Su, W. Bearing fault diagnosis based on DTCWT and GA improved sparse decomposition. J. Huazhong Univ. Sci. Technol. (Nat. Sci. Ed.) 2021, 49, 56–61. [Google Scholar]
- Zhang, X.; Li, L.; Liu, S.; Lei, J. Empirical wavelet transform based on energy peak location and its application in weak bearing fault diagnosis. J. Xi’an Jiaotong Univ. 2021, 55, 1–8. [Google Scholar]
- Duan, R.; Wang, F.; Zhou, L.; Yao, G. Detection of mechanical state of on load tap changer for converter transformer using narrowband noise assisted multiple empirical mode decomposition algorithm. J. Electrotech. 2017, 32, 182–189. [Google Scholar]
- Geng, C.; Wang, F.; Zhang, J. Modal parameters identification of power transformer winding based on improved Empirical Mode Decomposition method. Electr. Power Syst. Res. 2014, 108, 331–339. [Google Scholar] [CrossRef]
- Shi, Y.; Zhuang, Z.; Lin, J. Bearing fault diagnosis based on convolution sparse representation and isometric mapping. Vib. Test Diagn. 2019, 39, 1081–1088+1138. [Google Scholar]
- Wu, C.; Zhang, D.; He, J. Protection scheme for VSC-MTDC based on low-frequency reactive power. Electr. Power Syst. Res. 2022, 204, 107703. [Google Scholar] [CrossRef]
- Zamani, R.; Mohammad, E.; Hamedani, G.; Hassan, H. A novel synchronous DGs islanding detection method based on online dynamic features extraction. Electr. Power Syst. Res. 2021, 195, 107180. [Google Scholar] [CrossRef]
- Zhou, X.; Wang, F.; Fu, J.; Lin, J.; Jin, Z. Mechanical condition monitoring of on load tap changer based on Chaos Theory and K-means clustering. Proc. CSEE 2015, 35, 1541–1548. [Google Scholar]
- Mehdi, B.; Ahmed, A. Clustering of transformer condition using frequency response analysis based on k-means and GOA. Electr. Power Syst. Res. 2022, 202, 107619. [Google Scholar]
- Zhang, J.; Tian, J.; Li, M.; Leon, J.I.; Franquelo, L.G.; Luo, H.; Yin, S. A parallel hybrid neural network with integration of spatial and temporal features for remaining useful life prediction in prognostics. IEEE Trans. Instrum. Meas. 2023, 72, 3501112. [Google Scholar] [CrossRef]
- Zhang, J.; Li, X.; Tian, J.; Luo, J.; Yin, S. An integrated multi-head dual sparse self-attention network for remaining useful life prediction. Reliab. Eng. Syst. Saf. 2023, 233, 109096. [Google Scholar] [CrossRef]
- Shangguan, X.; He, Y.; Zhang, C.; Jin, L.; Yao, W.; Jiang, L.; Wu, M. Control performance standards-oriented event-triggered load frequency control for power systems under limited communication bandwidth. IEEE Trans. Control Syst. Technol. 2022, 30, 860–868. [Google Scholar] [CrossRef]
- Liu, J.; Li, Q.; Chen, W.; Yan, Y. Fault diagnosis method for tram fuel cell system based on multi class correlation vector machine and fuzzy C-means clustering. Proc. CSEE 2018, 38, 6045–6052. [Google Scholar]
- Wu, J.; Wu, Z.; Mao, X. Risk early warning method for distribution system with sources-networks-loads-vehicles based on fuzzy C-mean clustering. Electr. Power Syst. Res. 2020, 180, 106059. [Google Scholar]
- Ding, Y.; He, Y.; Li, B.; Cui, J. Inverter fault diagnosis based on wavelet packet and quantum neural network. J. Chongqing Univ. Technol. (Nat. Sci.) 2021, 35, 152–158. [Google Scholar]
- Deng, M. Research on mechanical fault diagnosis of on load tap changer based on vibration signal. Transformer 2018, 55, 26–29. [Google Scholar]
- Liu, B.; Yu, Y.; Bai, X.; Ke, Z.; Wang, J. Research on transformer fault detection system based on vibration signal analysis. Electr. Autom. 2020, 42, 80–82+86. [Google Scholar]
- Gao, G.; Han, T.; Wu, B.; Fu, J.; Xia, Z. A hue preservation lossless contrast enhancement method with RDH for color images. Digit. Signal Process. 2023, 136, 103965. [Google Scholar] [CrossRef]
- Zhou, H.; Yan, P.; Huang, Q.; Yuan, Y.; Pei, J.; Yang, Y. Hob vibration signal denoising and effective features enhancing using improved complete ensemble empirical mode decomposition with adaptive noise and fuzzy rough sets. Expert Syst. Appl. 2023, 233, 120989. [Google Scholar] [CrossRef]
- Shao, Z.; Zheng, Q.; Liu, C. A feature extraction and ranking-based framework for electricity spot price forecasting using a hybrid deep neural network. Electr. Power Syst. Res. 2021, 200, 107453. [Google Scholar] [CrossRef]
- Ozgonenel, O.; Yalcin, T.; Guney, I. A new classification for power quality events in distribution systems. Electr. Power Syst. Res. 2013, 95, 192–199. [Google Scholar] [CrossRef]
- Huang, N.; Long, S.; Zheng, S. A new view of nonlinear water waves: The Hilbert spectrum. Annu. Rev. Fluid Mech. 1999, 31, 457–471. [Google Scholar] [CrossRef]
- Gao, A.; Zhu, Y.; Zhang, Y.; Cai, W. Partial discharge pattern recognition of transformers based on marginal spectrum image and deep residual network. Power Syst. Technol. 2021, 45, 2433–2442. [Google Scholar]
- Yan, J.; Ma, H.; Zhu, H.; Zhang, Y.; Li, Y.; Xu, H. Transformer winding looseness diagnosis based on LMD marginal spectral energy entropy and FWA-SVM. Electr. Meas. Instrum. 2021, 58, 74–80. [Google Scholar]
- Yu, M.; Zhao, W.; Wu, L.; Li, Y. Research on electric vehicle driving conditions based on K-means clustering and support vector machine. J. Chongqing Jiaotong Univ. (Nat. Sci. Ed.) 2021, 40, 129–139. [Google Scholar]
- Abdelhalim, M.; Boubakeur, Z.; Mohammed, B. Fixed least squares support vector machines for flashover modelling of outdoor insulators. Electr. Power Syst. Res. 2019, 173, 29–37. [Google Scholar]
- Yang, H.; Zhang, W.; Chen, J.; Wang, L. PMU-based voltage stability prediction using least square support vector machine with online learning. Electr. Power Syst. Res. 2018, 160, 234–242. [Google Scholar] [CrossRef]
- Li, Z.; Wang, H.; Qian, Y.; Huang, R.; Cui, Q. Pattern recognition of noisy partial discharge based on SURF. J. Electrotech. 2021, 10, 100–110. [Google Scholar]
- Yang, S.; Chen, S.; Li, G.; Jiang, J. Mechanical fault diagnosis of transformer on-load tap-changer based on variational modal decomposition and feature selection. South. Power Syst. Technol. 2019, 13, 39–47+59. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| OLTC Moving Contact Status | Related Coefficient (r) | |
|---|---|---|
| Mechanical Vibration Signal | High-Frequency Current Signal | |
| Normal condition | 1 | 1 |
| Loose state | 0.565 | 0.634 |
| Slight wear | 0.470 | 0.553 |
| Severe wear | 0.261 | 0.319 |
| IMF Component | Normal Condition | Moving Contact Loose | Moving Contact Slight Wear | Moving Contact Severe Wear |
|---|---|---|---|---|
| IMF1 | 2.9213 | 2.5627 | 2.3901 | 1.8172 |
| IMF2 | 2.276 | 2.0142 | 1.9283 | 1.5116 |
| IMF3 | 1.984 | 1.745 | 1.617 | 1.624 |
| IMF4 | 1.7998 | 1.5637 | 1.3869 | 1.964 |
| IMF5 | 1.507 | 1.3064 | 1.118 | 0.5927 |
| IMF6 | 1.8617 | 1.014 | 0.9081 | 0.5677 |
| IMF7 | 1.819 | 0.6592 | 0.4185 | 0.1278 |
| IMF8 | 1.717 | 0.4237 | 0.605 | 0.0779 |
| IMF Component | Normal Condition | Moving Contact Loose | Moving Contact Slight Wear | Moving Contact Severe Wear |
|---|---|---|---|---|
| IMF1 | 0.6691 | 0.4375 | 0.3017 | 0.1699 |
| IMF2 | 0.4206 | 0.4062 | 0.2856 | 0.1428 |
| IMF3 | 0.5013 | 0.3608 | 0.2601 | 0.1641 |
| IMF4 | 0.3918 | 0.4120 | 0.3015 | 0.1329 |
| IMF5 | 0.3216 | 0.3306 | 0.2590 | 0.0918 |
| IMF6 | 0.2961 | 0.3014 | 0.2310 | 0.0764 |
| IMF7 | 0.2654 | 0.2938 | 0.2045 | 0.1028 |
| IMF8 | 0.3013 | 0.2237 | 0.2407 | 0.0839 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, S.; Dou, L.; Li, H.; Li, Z.; Kang, Y. An Innovative Electromechanical Joint Approach for Contact Pair Fault Diagnosis of Oil-Immersed On-Load Tap Changer. Electronics 2023, 12, 3573. https://doi.org/10.3390/electronics12173573
Li S, Dou L, Li H, Li Z, Kang Y. An Innovative Electromechanical Joint Approach for Contact Pair Fault Diagnosis of Oil-Immersed On-Load Tap Changer. Electronics. 2023; 12(17):3573. https://doi.org/10.3390/electronics12173573
Chicago/Turabian StyleLi, Shuaibing, Lilong Dou, Hongwei Li, Zongying Li, and Yongqiang Kang. 2023. "An Innovative Electromechanical Joint Approach for Contact Pair Fault Diagnosis of Oil-Immersed On-Load Tap Changer" Electronics 12, no. 17: 3573. https://doi.org/10.3390/electronics12173573