
A Hierarchical Energy Control Strategy for Hybrid Electric Vehicle with Fuel Cell/Battery/Ultracapacitor Combining Fuzzy Controller and Status Regulator

Abstract
:1. Introduction
1.1. Energy Management Strategies for Fuel Cell Hybrid Electric Vehicles
1.2. Energy Management Strategy Based on Fuzzy Control
- (1)
- An energy allocation method combining fuzzy controller with the state regulator strategy is proposed to optimize the vehicle economy as well as overall vehicle energy utilization.
- (2)
- In order to minimize the depletion of the fuel cell, a state regulator is designed in combination with a fuzzy controller to distribute power to the fuel cell.
- (3)
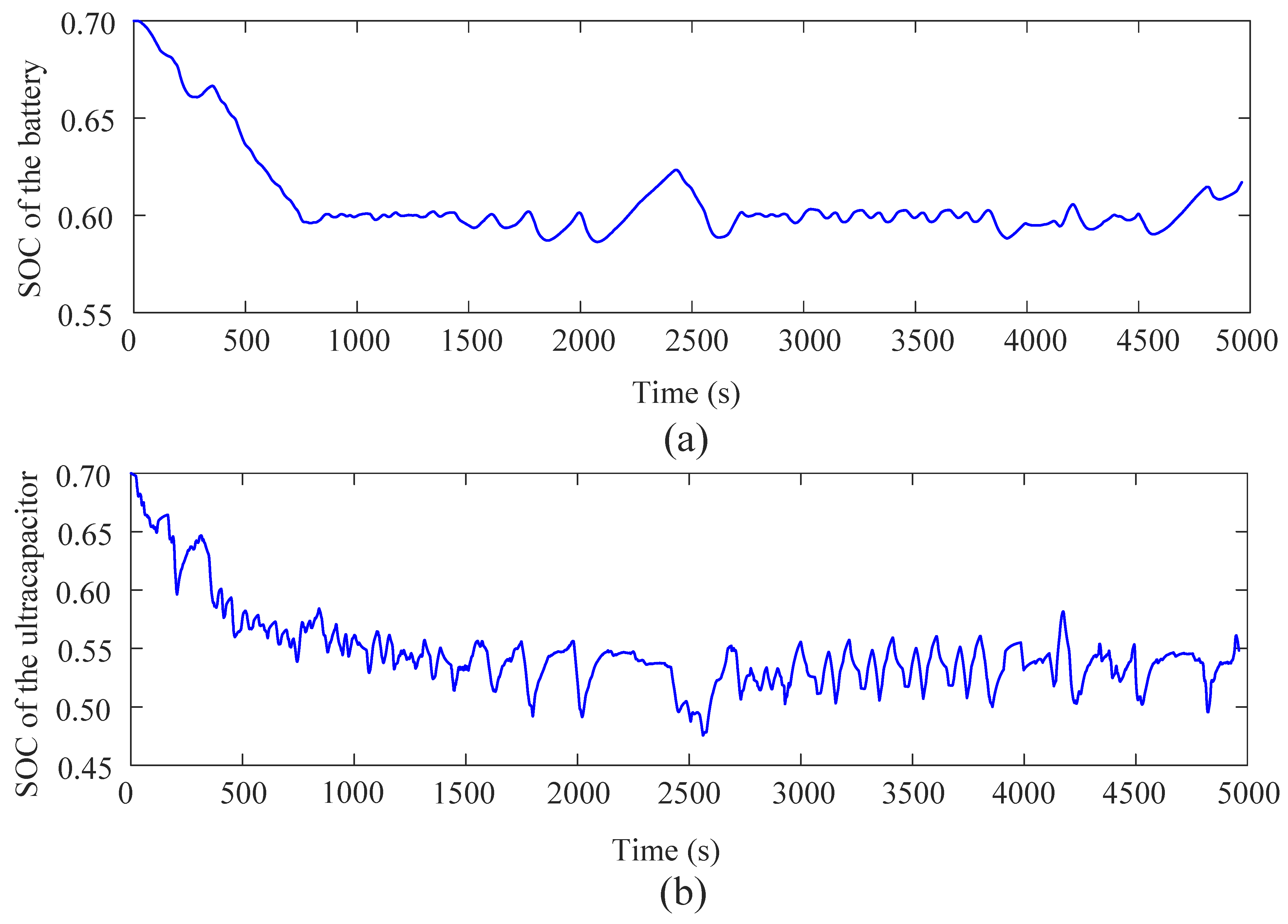
- Based on the characteristics of the energy storage system, an adaptive low-pass filter is incorporated into a lower energy management strategy to fully utilize the advantages of the ultracapacitor and maintain the SOC of the battery and ultracapacitor.
2. Vehicle Models and Parameter Calculation
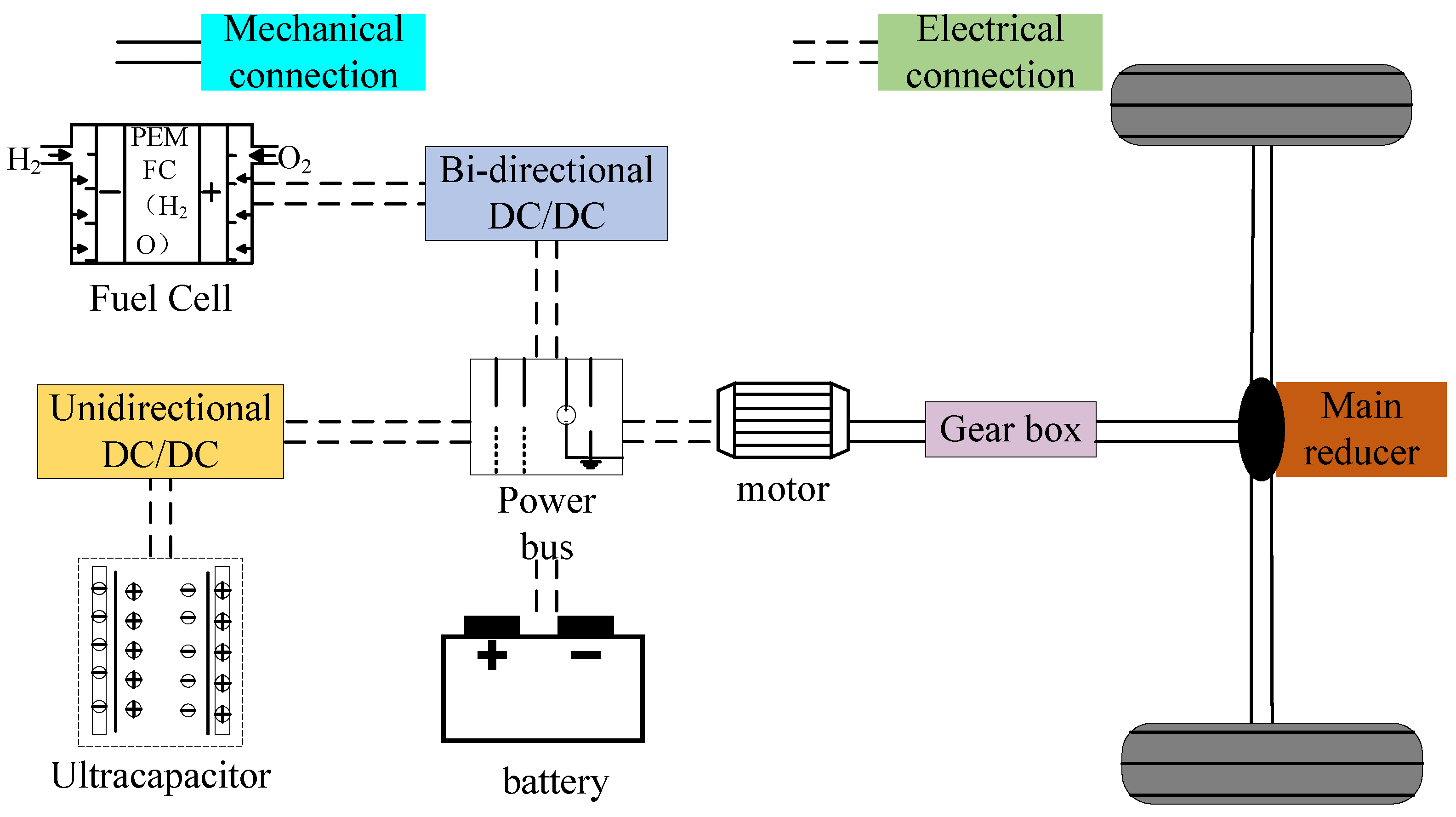
2.1. Vehicle Power System Structure
2.2. Dynamic Model and Parameters of Locomotive
2.3. Fuel Cell Model
2.4. Battery Model
2.5. Ultracapacitor Model
3. Design of Energy Management Strategy
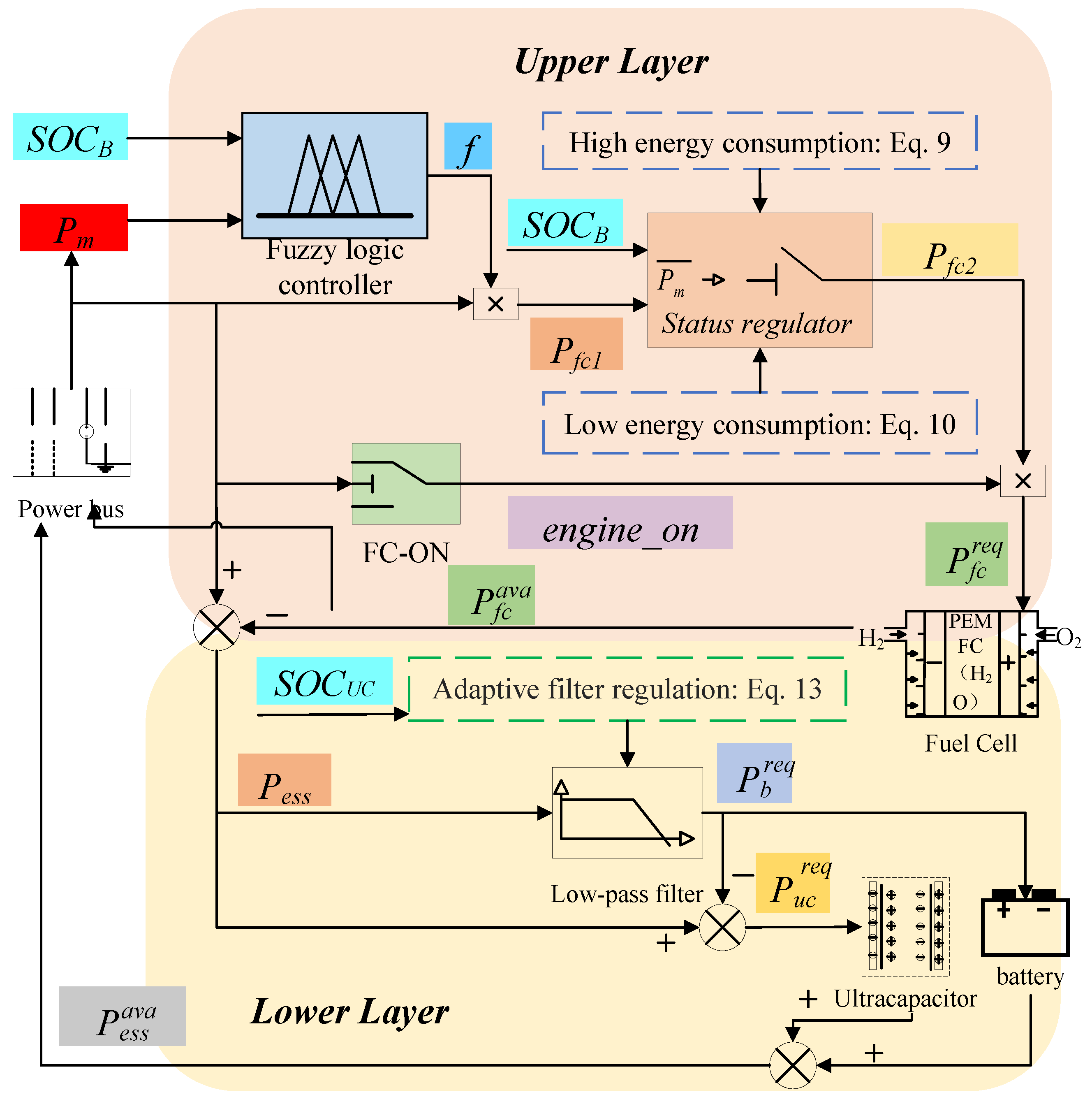
3.1. Upper-Layer Energy Management Strategy
- (1)
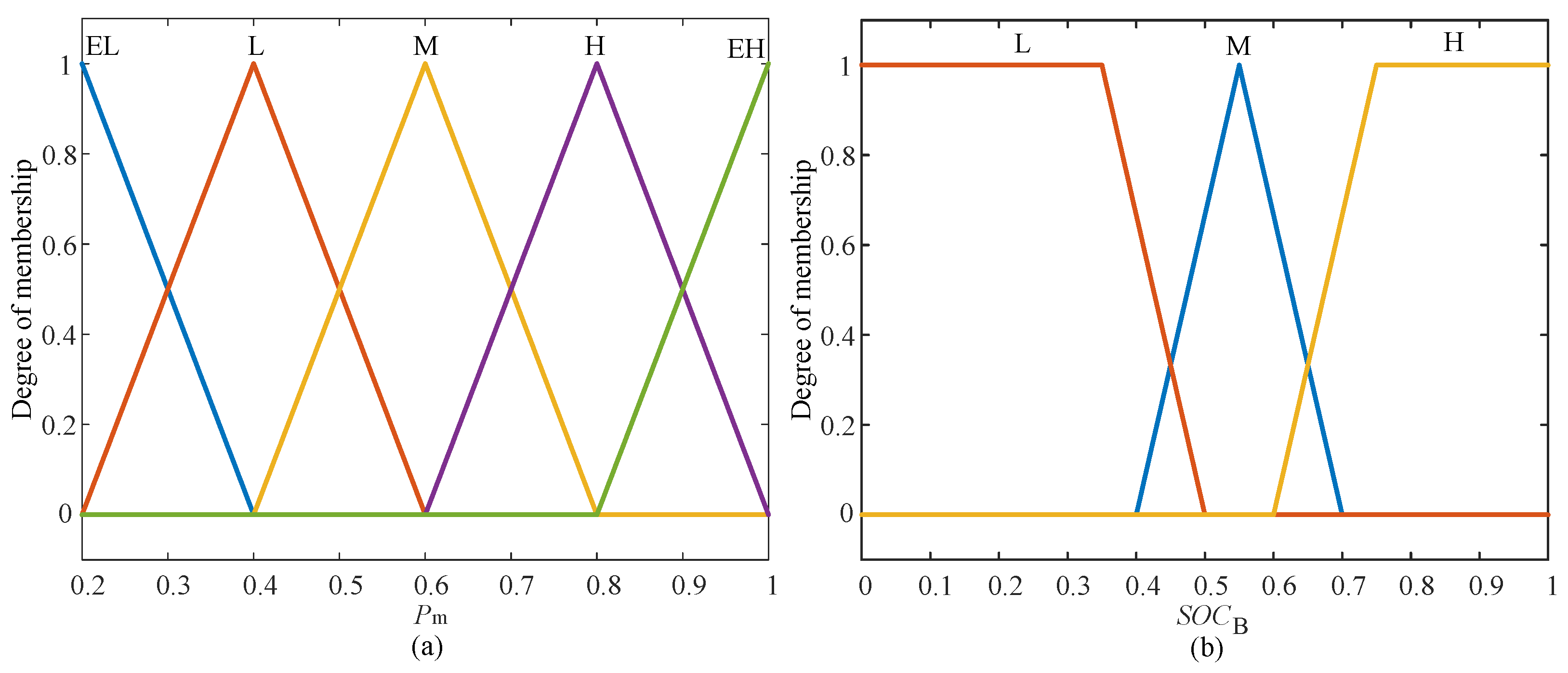
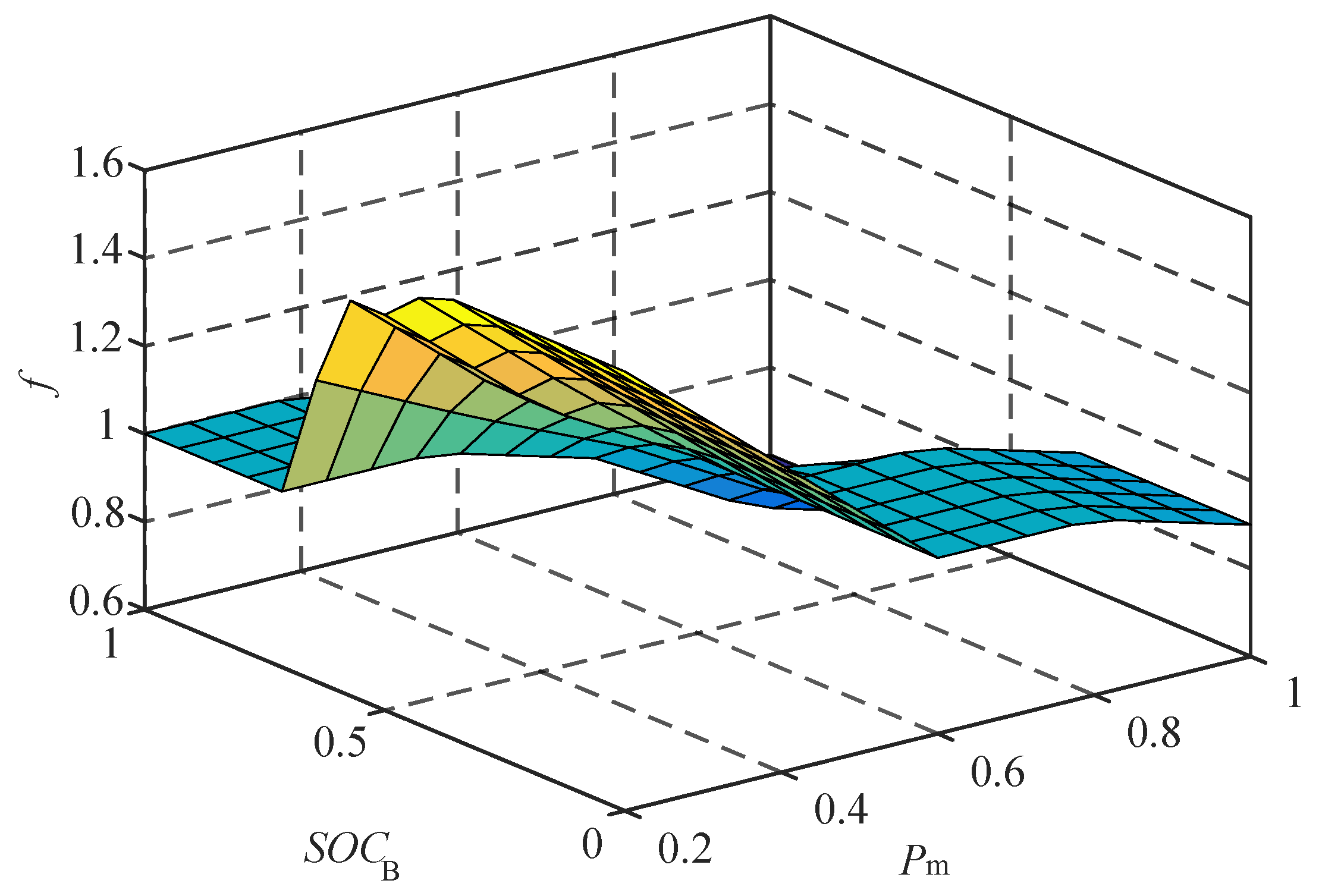
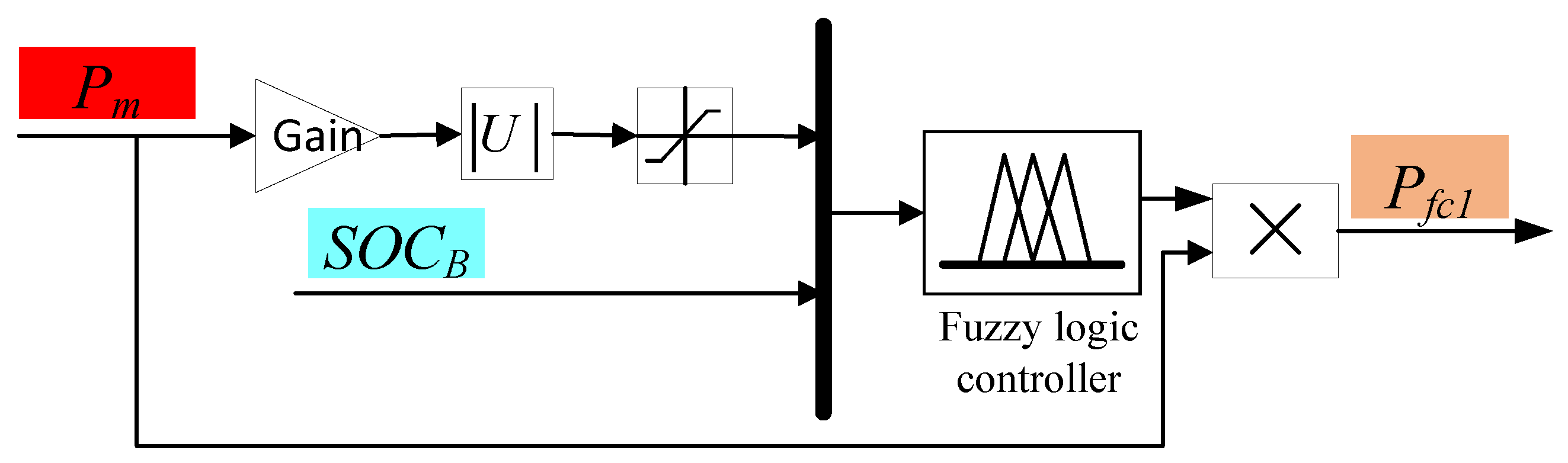
- Design of fuzzy controller
- (1)
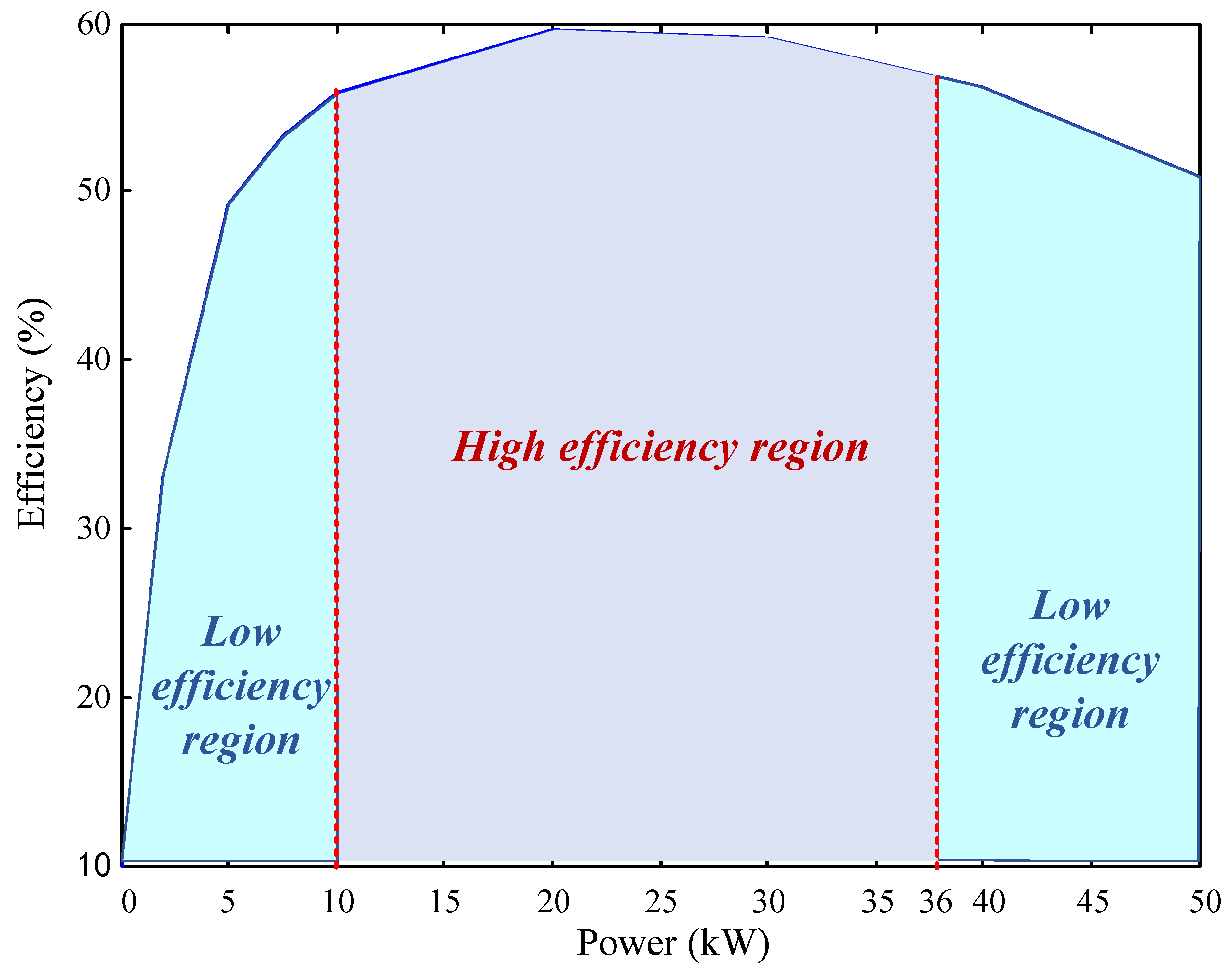
- In order to increase overall vehicle efficiency, the fuel cell needs to work in the high-efficiency region, and according to Figure 2, the power range of the fuel cell is [10 kW, 36 kW].
- (2)
- The energy of the battery is supplied by a fuel cell, which means that it is necessary to ensure that the operates in the range [0.4, 0.8].
- (3)
- The fuel cell does not operate when the vehicle is in a low-energy state, which reduces hydrogen consumption and extends the lifespan of the fuel cell by reducing the switching frequency.
- (2)
- Design of the status regulator
- (1)
- When ≥, the vehicle is in a high energy consumption state. The energy distribution in this state is described in Equation (9).
- (2)
- When >, the vehicle is in a low energy consumption state. The energy distribution in this state is indicated in Equation (10).can be calculated by Equation (11)
3.2. Lower-Layer Energy Management Strategy
4. Simulation Verification and Analysis
4.1. Introduction to the Working Mode of the PFS
- (1)
- Startup mode.
- (2)
- Fuel cell working alone and charging mode to ESS.
- (3)
- Fuel cell and the ESS common drive mode.
- (4)
- Deceleration or regenerative braking mode.
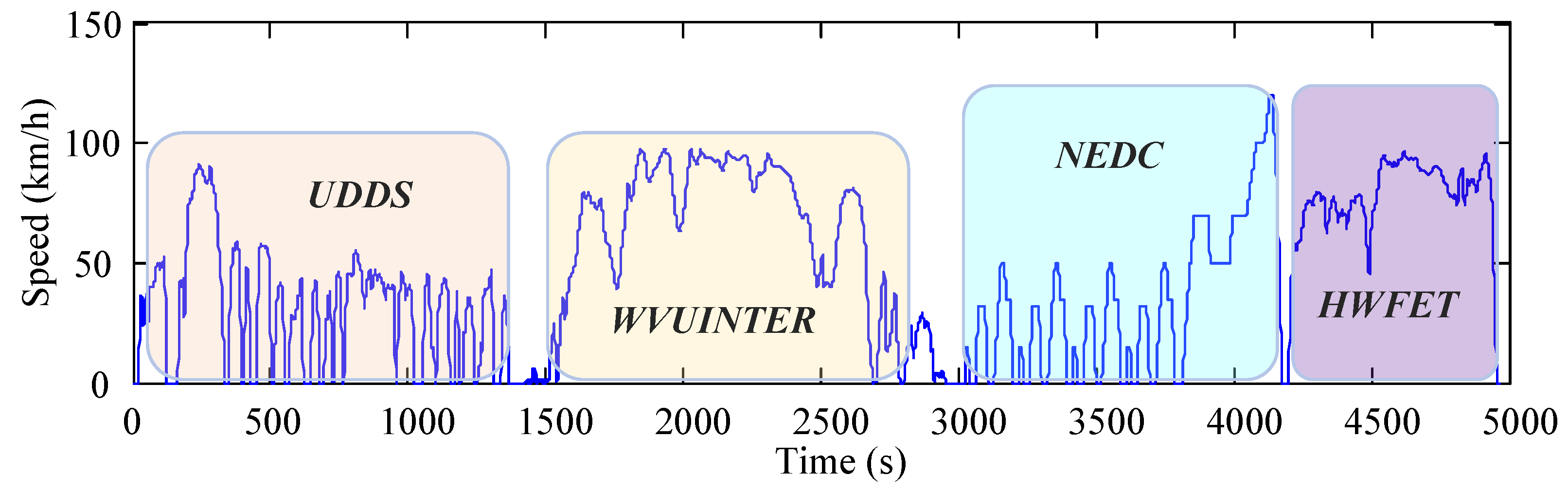
4.2. Simulation Conditions and Model Parameters
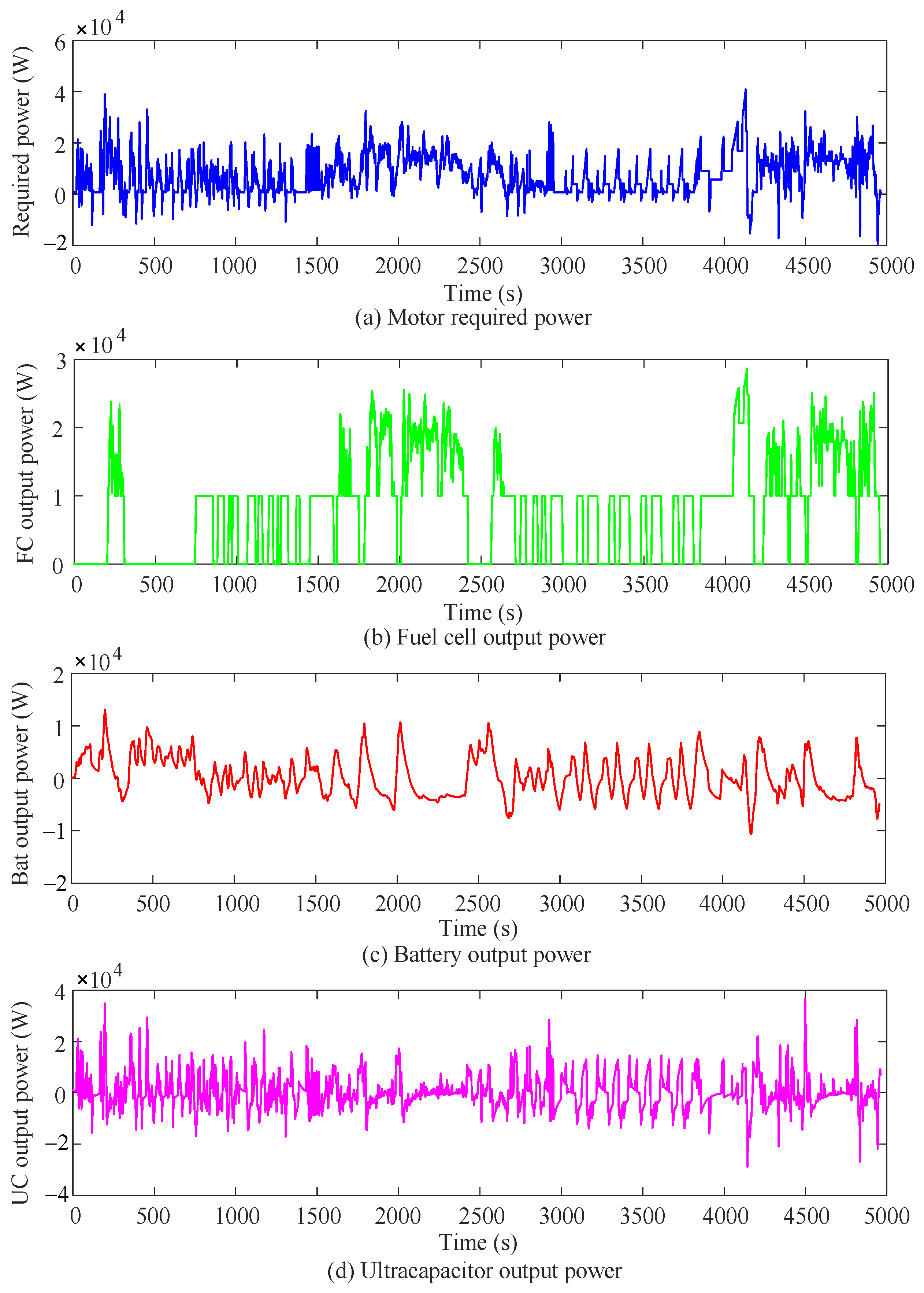
4.3. Results and Performance Analysis
5. Conclusions
- (1)
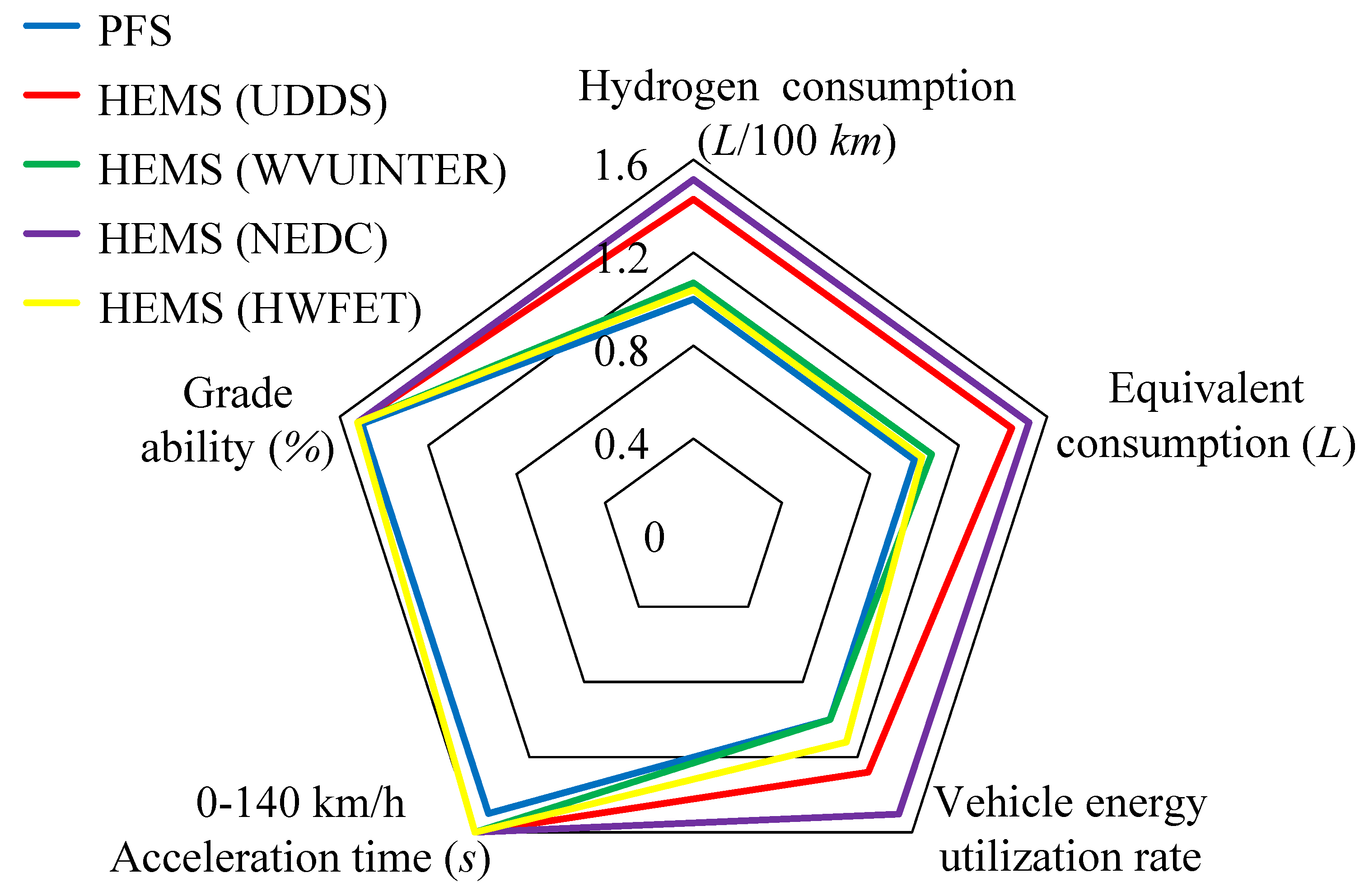
- The proposed HEMS saves 9.4% of hydrogen and increases the energy utilization by 4.3% compared to the PFS under the COMBINE condition, which indicates better vehicle fuel economy of the HEMS.
- (2)
- This HEMS has shorter acceleration time and stronger climbing ability, which indicates that the vehicle dynamic performance is improved. Therefore, the EMS proposed will be a novelty approach to the EMS of hybrid vehicles.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| FCHEV | Fuel cell hybrid electric vehicles |
| EMS | Energy management strategy |
| ADVISOR | Advanced Vehicle Simulator |
| UDDS | Urban dynamometer driving schedule |
| WVUINTER | West Virginia Interstate Driving Schedule |
| NEDC | New european drive cycle |
| HWFET | Highway fuel economy certification test |
| COMBINE | Combined cycle conditions for UDDS, WVUINTER, NEDC and HWFET |
| SOC | State of charge |
| ESS | Energy storage system |
| FCS | Fuel cell system |
| PFS | Power following management strategy |
| HEMS | Hierarchical energy management strategy |
| SOC of battery | |
| Target SOC value for battery | |
| SOC of ultracapacitor | |
| Target SOC value for ultracapacitor | |
| Required power for energy storage system | |
| Motor demand power | |
| Fuel cell output power | |
| The output power of the fuel cell after one correction | |
| The output power of the fuel cell after two corrections | |
| Upper limit of fuel cell power | |
| Lower limit of fuel cell power | |
| Upper limit of battery SOC | |
| Lower limit of battery SOC | |
| f | Fuzzy controller output scale coefficient |
| Fuel cell required power | |
| Battery required power | |
| CSB_charge_pwr | The adjustment power of the battery |
| CSuc_charge_pwr | The adjustment power of the ultracapacitor |
| Supercapacitor required power | |
| The power available from the fuel cell | |
| The power available from the energy storage system | |
| Upper limit of ultracapacitor SOC | |
| Lower limit of battery SOC | |
| engine_on | Fuel cell switch |
| Average power demand per minute |
References
- Emadi, A.; Williamson, S. Fuel cell vehicles: Opportunities and challenges. In Proceedings of the IEEE Power Engineering Society General Meeting, Arlington, TX, USA, 9–12 September 2004; Volume 2, pp. 1640–1645. [Google Scholar] [CrossRef]
- Barbir, F.; Yazici, S. Status and development of PEM fuel cell technology. Int. J. Energy Res. 2008, 32, 369–378. [Google Scholar] [CrossRef]
- Fu, Z.; Li, Z.; Si, P.; Tao, F. A hierarchical energy management strategy for fuel cell/battery/supercapacitor hybrid electric vehicles. Int. J. Hydrogen Energy 2019, 44, 22146–22159. [Google Scholar] [CrossRef]
- Manoharan, Y.; Hosseini, S.E.; Butler, B.; Alzhahrani, H.; Krohn, J. Hydrogen Fuel Cell Vehicles; Current Status and Future Prospect. Appl. Sci. 2019, 9, 2296. [Google Scholar] [CrossRef] [Green Version]
- Ahmadi, S.; Bathaee, S.M.T.; Hosseinpour, A.H. Improving fuel economy and performance of a fuel-cell hybrid electric vehicle (fuel-cell, battery, and ultra-capacitor) using optimized energy management strategy. Energy Convers. Manag. 2018, 160, 74–84. [Google Scholar] [CrossRef]
- Anbarasu, A.; Dinh, T.Q.; Sengupta, S. Novel enhancement of energy management in fuel cell hybrid electric vehicle by an advanced dynamic model predictive control. Energy Convers. Manag. 2022, 267, 115883. [Google Scholar] [CrossRef]
- Li, X.; Wang, Y.; Yang, D.; Chen, Z. Adaptive Energy Management Strategy for Fuel Cell/Battery Hybrid Vehicles using Pontryagin’s Minimal Principle. J. Power Sources 2019, 440, 227105. [Google Scholar] [CrossRef]
- Desantes, J.; Novella, R.; Pla, B.; Lopez-Juarez, M. Effect of dynamic and operational restrictions in the energy management strategy on fuel cell range extender electric vehicle performance and durability in driving conditions. Energy Convers. Manag. 2022, 266, 115821. [Google Scholar] [CrossRef]
- Tao, F.; Zhu, L.; Ji, B.; Si, P.; Fu, Z. Energy Management Strategy Using Equivalent Consumption Minimization Strategy for Hybrid Electric Vehicles. Secur. Commun. Netw. 2020, 2020, 6642304. [Google Scholar] [CrossRef]
- Lu, H.; Tao, F.; Fu, Z.; Sun, H. Battery-degradation-involved energy management strategy based on deep reinforcement learning for fuel cell/battery/ultracapacitor hybrid electric vehicle. Electr. Power Syst. Res. 2023, 220, 109235. [Google Scholar] [CrossRef]
- Yang, H.-F.; Zhang, C.; Gong, X.; Hu, Y.-F.; Chen, H. Energy Management Strategy of Fuel Cell Hybrid Electric Vehicle Based on Dynamic Programming. In Proceedings of the 2020 Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020. [Google Scholar]
- Kandidayeni, M.; Macias, A.; Boulon, L.; Kelouwani, S. Investigating the impact of ageing and thermal management of a fuel cell system on energy management strategies. Appl. Energy 2020, 274, 115293. [Google Scholar] [CrossRef]
- Pereira, D.F.; Lopes, F.d.C.; Watanabe, E.H. Nonlinear Model Predictive Control for the Energy Management of Fuel Cell Hybrid Electric Vehicles in Real Time. IEEE Trans. Ind. Electron. 2021, 68, 3213–3223. [Google Scholar] [CrossRef]
- Jia, C.; Qiao, W.; Cui, J.; Qu, L. Adaptive Model-Predictive-Control-Based Real-Time Energy Management of Fuel Cell Hybrid Electric Vehicles. IEEE Trans. Power Electron. 2023, 38, 2681–2694. [Google Scholar] [CrossRef]
- Liu, Y.; Zhu, L.; Tao, F.; Fu, Z. Energy Management Strategy of FCHEV Based on ECMS Method. In Proceedings of the 2019 8th International Conference on Networks, Communication and Computing, Luoyang, China, 13–15 December 2020; pp. 197–201. [Google Scholar] [CrossRef]
- Huangfu, Y.; Li, P.; Pang, S.; Tian, C.; Quan, S.; Zhang, Y.; Wei, J. An Improved Energy Management Strategy for Fuel Cell Hybrid Vehicles Based on Pontryagin’s Minimum Principle. IEEE Trans. Ind. Appl. 2022, 58, 4086–4097. [Google Scholar] [CrossRef]
- Luca, R.; Whiteley, M.; Neville, T.; Shearing, P.R.; Brett, D.J. Comparative study of energy management systems for a hybrid fuel cell electric vehicle—A novel mutative fuzzy logic controller to prolong fuel cell lifetime. Int. J. Hydrogen Energy 2022, 47, 24042–24058. [Google Scholar] [CrossRef]
- Yuan, H.B.; Zou, W.J.; Jung, S.; Kim, Y.B. A Real-Time Rule-Based Energy Management Strategy With Multi-Objective Optimization for a Fuel Cell Hybrid Electric Vehicle. IEEE Access 2022, 10, 102618–102628. [Google Scholar] [CrossRef]
- Zhai, D.; An, L.; Dong, J.; Zhang, Q. Switched Adaptive Fuzzy Tracking Control for a Class of Switched Nonlinear Systems Under Arbitrary Switching. IEEE Trans. Fuzzy Syst. 2018, 26, 585–597. [Google Scholar] [CrossRef]
- Li, Q.; Chen, W.; Li, Y.; Liu, S.; Huang, J. Energy management strategy for fuel cell/battery/ultracapacitor hybrid vehicle based on fuzzy logic. Int. J. Electr. Power Energy Syst. 2012, 43, 514–525. [Google Scholar] [CrossRef]
- Tao, F.; Zhu, L.; Fu, Z.; Si, P.; Sun, L. Frequency Decoupling-Based Energy Management Strategy for Fuel Cell/Battery/Ultracapacitor Hybrid Vehicle Using Fuzzy Control Method. IEEE Access 2020, 8, 166491–166502. [Google Scholar] [CrossRef]
- Farhadi Gharibeh, H.; Farrokhifar, M. Online Multi-Level Energy Management Strategy Based on Rule-Based and Optimization-Based Approaches for Fuel Cell Hybrid Electric Vehicles. Appl. Sci. 2021, 11, 3849. [Google Scholar] [CrossRef]
- Fu, Z.; Zhu, L.; Tao, F.; Si, P.; Sun, L. Optimization based energy management strategy for fuel cell/battery/ultracapacitor hybrid vehicle considering fuel economy and fuel cell lifespan. Int. J. Hydrogen Energy 2020, 45, 8875–8886. [Google Scholar] [CrossRef]
- Lü, X.; Wu, Y.; Lian, J.; Zhang, Y.; Chen, C.; Wang, P.; Meng, L. Energy management of hybrid electric vehicles: A review of energy optimization of fuel cell hybrid power system based on genetic algorithm. Energy Convers. Manag. 2020, 205, 112474. [Google Scholar] [CrossRef]
- Pielecha, I. Modeling of Fuel Cells Characteristics in Relation to Real Driving Conditions of FCHEV Vehicles. Energies 2022, 15, 6753. [Google Scholar] [CrossRef]
- Tao, F.; Gong, H.; Fu, Z.; Guo, Z.; Chen, Q.; Song, S. Terrain information-involved power allocation optimization for fuel cell/battery/ultracapacitor hybrid electric vehicles via an improved deep reinforcement learning. Eng. Appl. Artif. Intell. 2023, 125, 106685. [Google Scholar] [CrossRef]
- Tifour, B.; Moussa, B.; Ahmed, H.; Camel, T. Monitoring and control of energy management system for fuel cell hybrid in electrical vehicle using fuzzy approach. Diagnostyka 2020, 21, 15–29. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Parameters | Symbols | Values |
|---|---|---|
| Air density (kg/m3) | 1.2 | |
| Coefficient of aerodynamic drag | C | 0.335 |
| Frontal area (m2) | A | 2.0 |
| Rolling resistance coefficient | 0.6 | |
| Mass (kg) | m | 1380 |
| Wheelbase (m) | r | 2.6 |
| f | ||||||
|---|---|---|---|---|---|---|
| EL | L | M | H | EH | ||
| L | 1.6 | 1.3 | 1.0 | 1.0 | 0.9 | |
| M | 1.5 | 1.2 | 1.0 | 0.8 | 0.7 | |
| H | 1.0 | 1.0 | 0.9 | 0.7 | 0.6 | |
| Parameter | UDDS | WVUINTER | NEDC | HWFET | COMBINE |
|---|---|---|---|---|---|
| Time (s) | 1369 | 1640 | 1184 | 765 | 4961 |
| Distance (km) | 11.99 | 24.96 | 10.93 | 16.51 | 64.39 |
| Average speed (km/h) | 31.51 | 54.75 | 33.21 | 77.58 | 46.71 |
| Maximum speed (km/h) | 91.25 | 97.74 | 120 | 96.4 | 120 |
| Average acceleration (m/s2) | 0.51 | 1.42 | 0.54 | 0.19 | 0.34 |
| Average deceleration (m/s2) | −0.58 | −1.86 | −0.79 | −0.22 | −0.39 |
| Maximum acceleration (m/s) | 1.48 | 0.2 | 1.06 | 1.43 | 1.48 |
| Maximum deceleration (m/s2) | −1.48 | −0.21 | −1.39 | −1.48 | −1.86 |
| Idle time (s) | 259 | 153 | 298 | 6 | 716 |
| Number of stops | 17 | 9 | 13 | 1 | 40 |
| Grade (%) | 0 | 0 | 0 | 0 | 0 |
| Components | Type | Main Parameters | Values |
|---|---|---|---|
| Motor | AC75 | Maximum power () | 75 |
| Rated voltage () | 320 | ||
| Average efficiency (%) | 90 | ||
| Fuel cell system | PEMFC | Maximum net power () | 50 |
| Average efficiency (%) | 56 | ||
| Battery | PB25 | Capacity () | 25 |
| Rated voltage () | 12 | ||
| Number | 25 | ||
| Maximum discharging | 5C | ||
| Ultracapacitor | Maxwell | Number | 150 |
| Capacity () | 2500 |
| Driving Conditions | Contrast Parameters | PFS | HEMS | Rates |
|---|---|---|---|---|
| UDDS | Fuel consumption (L/100 km) | 84.5 | 41.7 | |
| Equivalent consumption (L) | 5.7 | 2.8 | ||
| Vehicle energy utilization rate | 0.125 | 0.193 | ||
| WVUINTER | Fuel consumption (L/100 km) | 57 | 43.9 | |
| Equivalent consumption (L) | 3.9 | 3.0 | ||
| Vehicle energy utilization rate | 0.263 | 0.311 | ||
| NEDC | Fuel consumption (L/100 km) | 82.6 | 37.6 | |
| Equivalent consumption (L) | 5.6 | 2.5 | ||
| Vehicle energy utilization rate | 0.163 | 0.263 | ||
| HWFET | Fuel consumption (L/100 km) | 43.3 | 40.0 | |
| Equivalent consumption (L) | 2.9 | 2.7 | ||
| Vehicle energy utilization rate | 0.335 | 0.357 | ||
| COMBINE | Fuel consumption (L/100 km) | 58.4 | 52.9 | |
| Equivalent consumption (L) | 4 | 3.6 | ||
| Vehicle energy utilization rate | 0.246 | 0.257 |
| Dynamic Properties | PFS | HEMS |
|---|---|---|
| 0–100 km/h acceleration time (s) | 8.4 | 6.6 |
| 60–100 km/h acceleration time (s) | 5 | 3.2 |
| 0–140 km/h acceleration time (s) | 20.2 | 13.5 |
| Maximum speed (km/h) | 157.1 | 157.2 |
| Maximum acceleration (m/s2) | 5 | 5 |
| Distance in 5 s (m) | 60.1 | 61.9 |
| 400 m acceleration time (s) | 16.3 | 15.0 |
| Grade ability (%) | 36.7 | 39.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, X.; Zhao, M. A Hierarchical Energy Control Strategy for Hybrid Electric Vehicle with Fuel Cell/Battery/Ultracapacitor Combining Fuzzy Controller and Status Regulator. Electronics 2023, 12, 3428. https://doi.org/10.3390/electronics12163428
Jia X, Zhao M. A Hierarchical Energy Control Strategy for Hybrid Electric Vehicle with Fuel Cell/Battery/Ultracapacitor Combining Fuzzy Controller and Status Regulator. Electronics. 2023; 12(16):3428. https://doi.org/10.3390/electronics12163428
Chicago/Turabian StyleJia, Xiaorui, and Mi Zhao. 2023. "A Hierarchical Energy Control Strategy for Hybrid Electric Vehicle with Fuel Cell/Battery/Ultracapacitor Combining Fuzzy Controller and Status Regulator" Electronics 12, no. 16: 3428. https://doi.org/10.3390/electronics12163428