1. Introduction
The remarkable shortage in the deposits of fossil fuels around the world inspired scientists to look for alternative sources. Renewable energy can be found in different forms according to its origin, like wind, solar, geothermal, wave, and nuclear energy [
1]. However, in order to realize the maximum exploitation of those types, a precise plan should be followed in which the system emulation is fulfilled through the modeling and control of each system component. The renewable energy system also has different configurations according to the number of generation units used and the point of common coupling. For example, there are systems that consist of only one generating unit [
2]. The main challenge when connecting these systems is ensuring power synchronization with the grid and delivering power with high quality. In such systems, attention must be paid to ensure appropriate dynamic performance for the generation unit and grid as well. Accordingly, the choice of adopted control with machine and grid sides must be precisely accomplished [
3].
Alternatively, renewable energy systems can come in another form in which they are disconnected from the grid but feed remote, isolated loads [
4]. These types can consist of only one generation unit. However, these types are not so favored due to their reduced reliability and limited generation of power [
5]. Consequently, the orientation towards hybrid renewable systems is given higher attention. Higher dependability and increased load ratings are provided by hybrid systems [
6,
7]. In general, these systems comprise multiple generation units [
8]. Additionally, due to natural weather conditions, hybrid systems are usually linked with storage devices such as batteries, fuel cells, and flywheels [
9]. Accordingly, a proper power management system should be present to ensure smooth power exchange between all system components.
Present studies show the viability of combining many energy sources, and they also highlight the consequences of variations in weather conditions on hybrid systems [
10]. The majority of research; however, concentrated on the scale and operational conditions of hybrid energy systems with straightforward structures. For example, various optimizers were employed in [
11,
12] to scale the hybrid system components. The investigation that was published in [
13] examined how a hybrid system fed DC average loads while the AC category loads were considered in [
14]. Although the studies in [
15,
16] investigated how hybrid power systems operate independently, they didn’t outline the examination of energy management approaches.
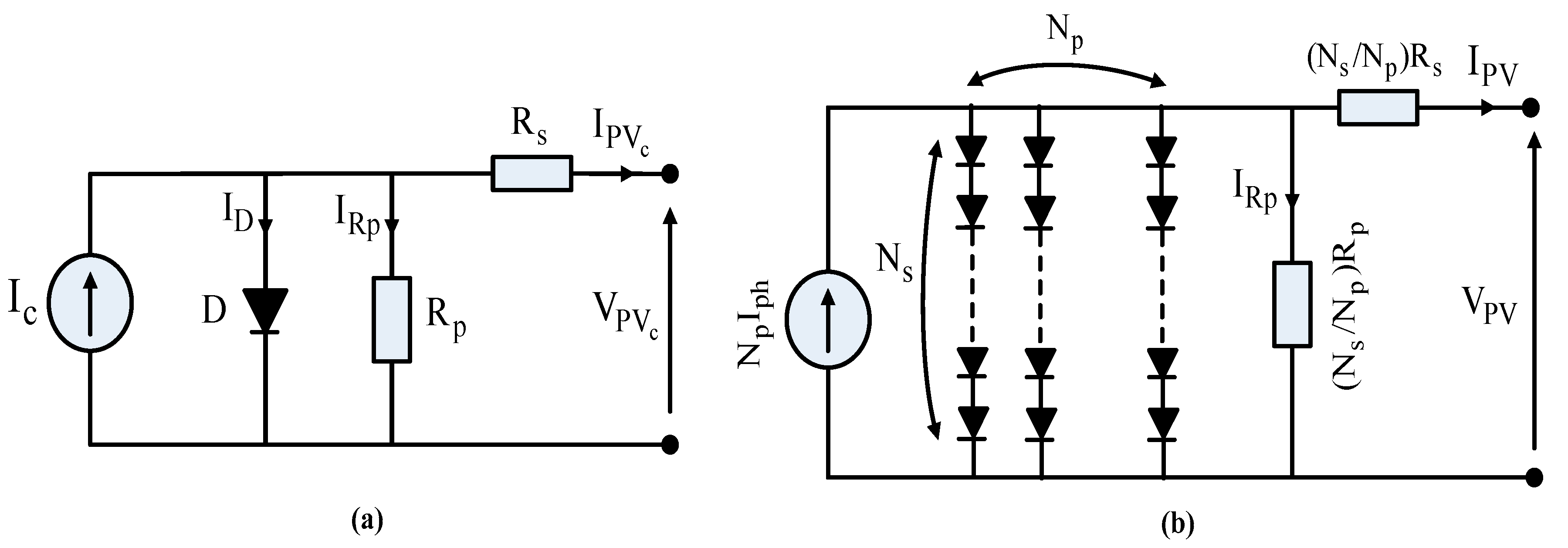
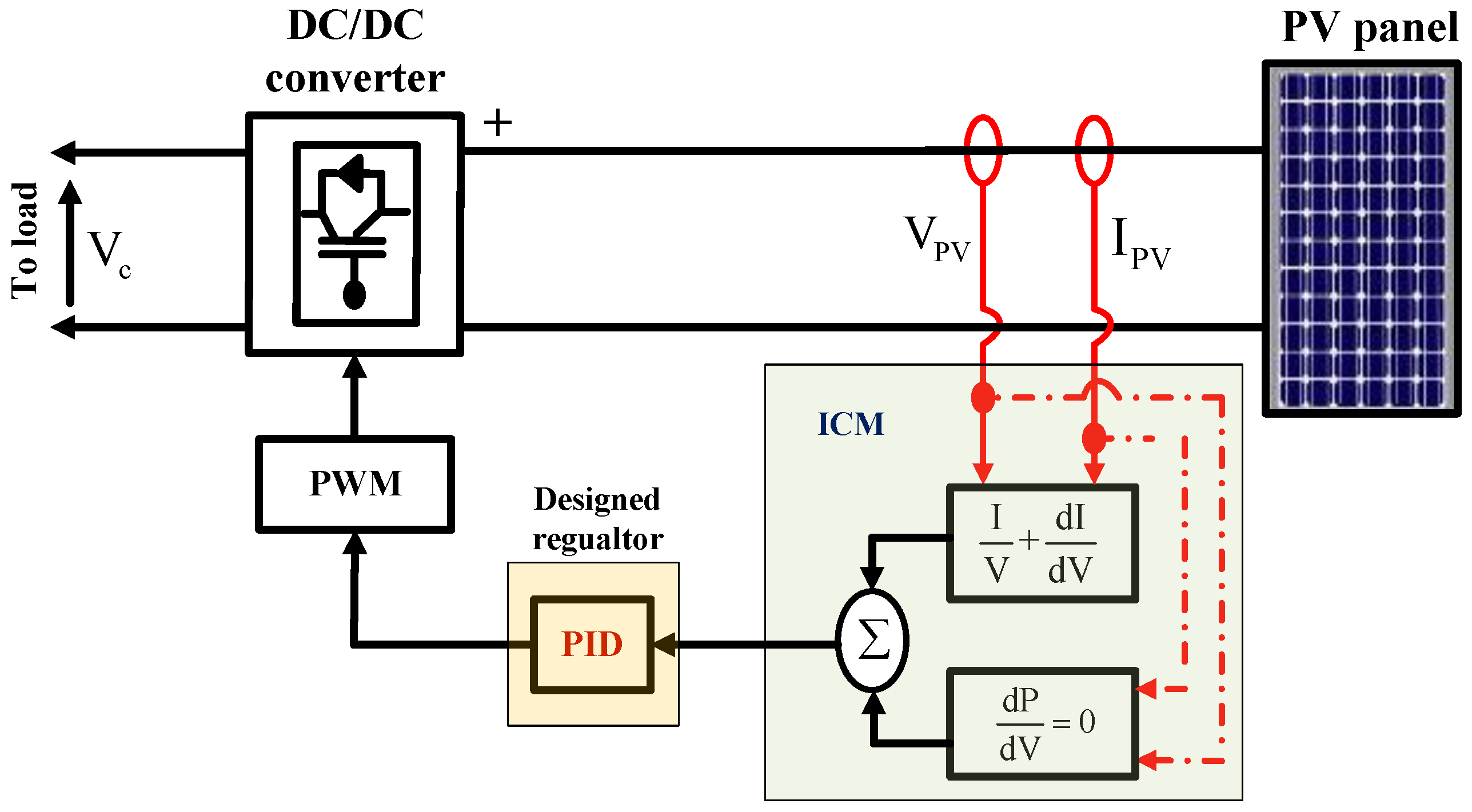
Further research on hybrid power systems can be conducted by incorporating effective power regulation and storage technologies. The target of power management (PM) is to keep a balance among the generated, consumed, and stored powers. The investigation may also take the form of developing new controllers. For example, the efficiency of the PV modules has been improved through extensive research. To highlight this issue, several techniques for monitoring the maximum power point (MPP) of a PV module have been put forth [
17,
18]. PV systems must incorporate an MPPT technique for the solar array because PV modules still have low conversion efficiency. The operating voltage of the array determines how much power a PV system will produce. The MPP of a PV changes with temperature and solar insulation [
19]. Accordingly, the switching signals for the PV power converter should be handled to ensure the achievement of this purpose.
In wind systems, a variety of generator topologies were utilized, starting with the asynchronous generators with their different categories, such as squirrel cage or wound rotor types [
20,
21], and then moving forward to the synchronous generators with permanent magnets [
22]. However, there is still an obvious gap in studying the performance of wind generation systems using multi-phase machines as an alternative to the traditional, previously mentioned three-phase machine types. Multi-phase machines have recently attracted new interest [
23,
24]. Furthermore, having a lot of phases enables power segmentation, which distributes loads across a variety of components [
25]. This makes it possible to use power components with high switching frequencies, which reduces the current harmonics and the torque ripples [
26,
27]. These benefits shouldn’t, however, obscure how intricate their control is in both normal and impaired modes [
28]. Due to the advantages of multi-phase machines, several studies have been presented to achieve the optimal performance of such machines.
The five-phase PMSG has proven itself as a superior multi-phase generator type in comparison with the multi-phase induction machines. Different control algorithms are considered for managing the performance of the five-phase PMSG. In [
29], the authors adopted the vector control principle to achieve decoupled regulation of the d-q components of the generated current. A good steady-state performance was achieved; however, a delay in the response was present. Alternatively, the DTC control was used in [
30], which replaced the PI current regulators with two hysteresis comparators and a unique voltage look-up table. Faster dynamics and reduced complexity were obtained with the DTC in comparison with vector control. However, the ripples of generated quantities and current harmonics were very noticeable in DTC. After that, recent control theories such as sliding mode control (SMC) [
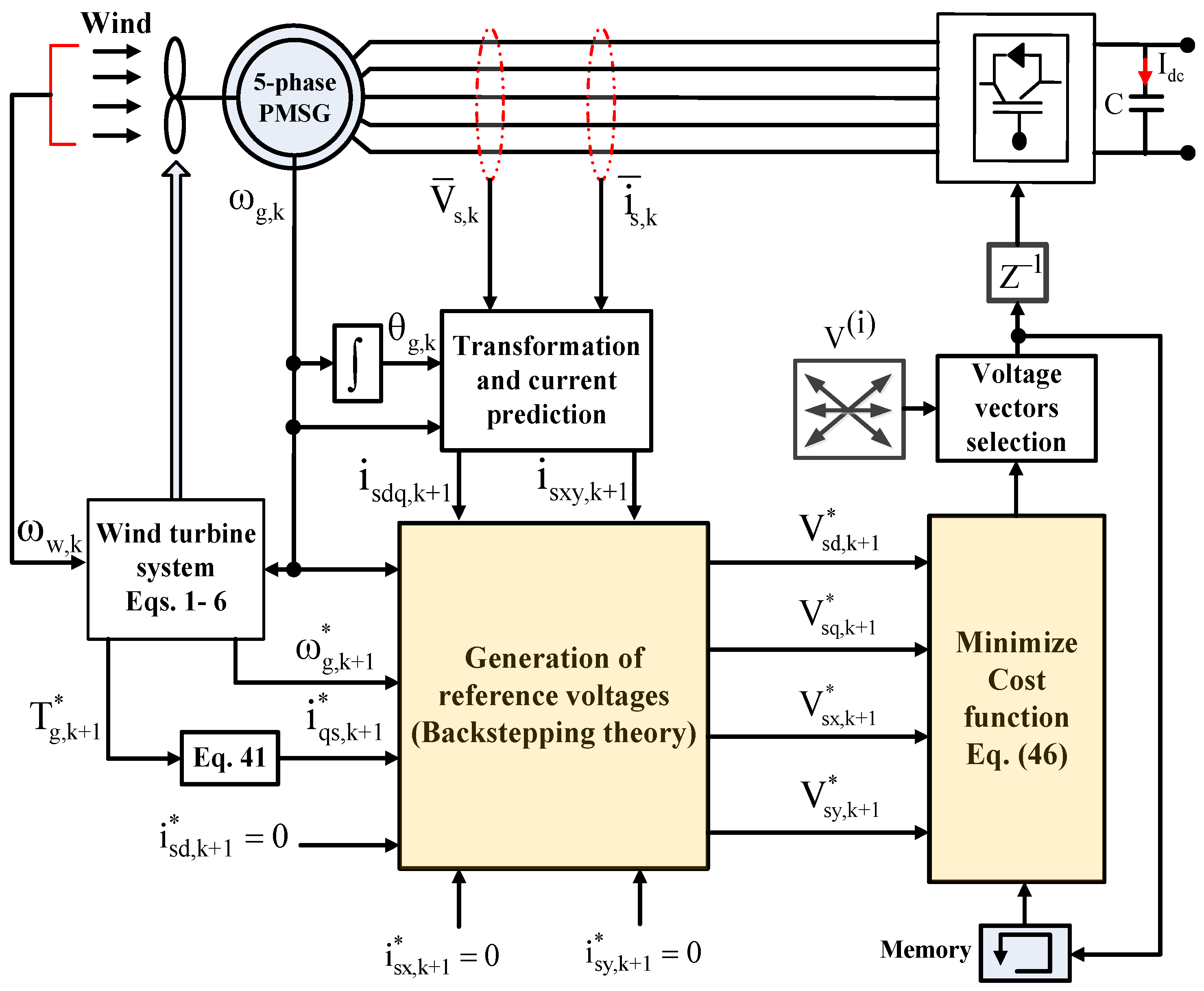
31] were adopted for controlling the operation of the five-phase PMSG. Better performance was obtained compared with the vector control and DTC techniques. However, the use of PWM modulators with these control approaches increased the overall system complexity. This is in addition to some internal control issues, such as the chattering effect in the SMC approach. Accordingly, an effective control theory appeared and was used as an alternative to the mentioned control topologies, which is the predictive control (PC) theory [
32]. This controller has the capacity to implement multiple control goals at once. It also can perform its task without utilizing a modulation scheme such as PWM. All of these facts provided more simplicity and flexibility for such a controller. The PC depends on utilizing a unique convergence condition (CC) that must be achieved to fulfill the control requirements. Based upon this hypothesis, different convergence conditions are adopted according to which variables should be controlled. For example, in [
33], predictive torque control (PTC) is considered, in which the CC is expressed by a mathematical formula that incorporates the definite errors of the generator torque and flux. The control target is to minimize this CC when the actual variables deviate from their references. Better performance was achieved with the PTC compared with the classic DTC and vector control. However, the main challenge was determining the appropriate value of the weighting coefficient to be used in the CC. Any imprecise selection of this value results in deteriorating control performance due to inaccurate voltage selection. Accordingly, the need to use a CC that doesn’t use a WC and combine control variables from the same category became a requirement. The predictive current control (PCC) [
34] is then adopted to fulfill these requirements, and better performance is achieved. However, the high computation burdens for the PTC and PCC were common and where not enhanced anymore. As a solution, the current paper presents the design for an effective predictive controller that avoids the deficiencies in previous controllers. The modified structure of the proposed controller helped ensure better steady state and transient operations. Additionally, it succeeded in relieving the computation capacity in relevant with the classic predictive controllers. To ensure power balance, an effective power management (PM) procedure is adopted. Furthermore, the control designs of the used converters are systematically explained.
Upon this detailed review, the paper contributions can then be outlined as follows:
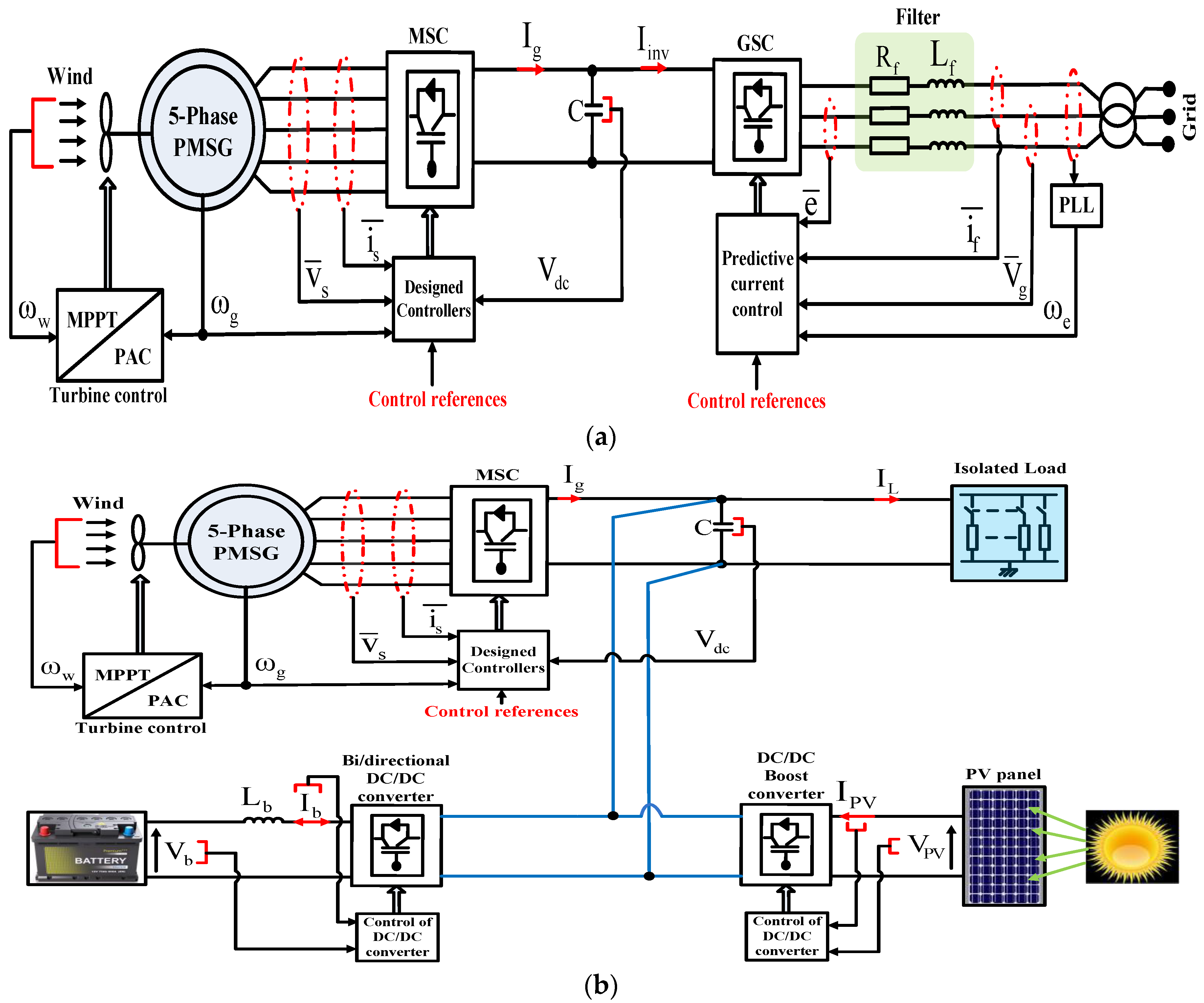
Introducing a detailed examination of a renewable energy system operated in two different modes: grid connected and standalone.
A detailed design for the control systems used for each system unit is discussed.
A novel predictive control topology is developed and applied to enhance the synchronous generator’s dynamics.
An effective MPPT strategy for the PV system is formulated and validated.
For standalone operation, an efficient procedure is adopted to maintain the power balance.
The feasibility of the considered generation system is confirmed for different operating conditions.
The current paper is organized as follows: in
Section 2, the modeling of all system components is provided in detail.
Section 3 describes the control design for all system components.
Section 4 introduces and defines the procedure utilized to ensure power balance. The testing results are provided and analyzed in
Section 5. Finally,
Section 6 gives the study’s conclusion.
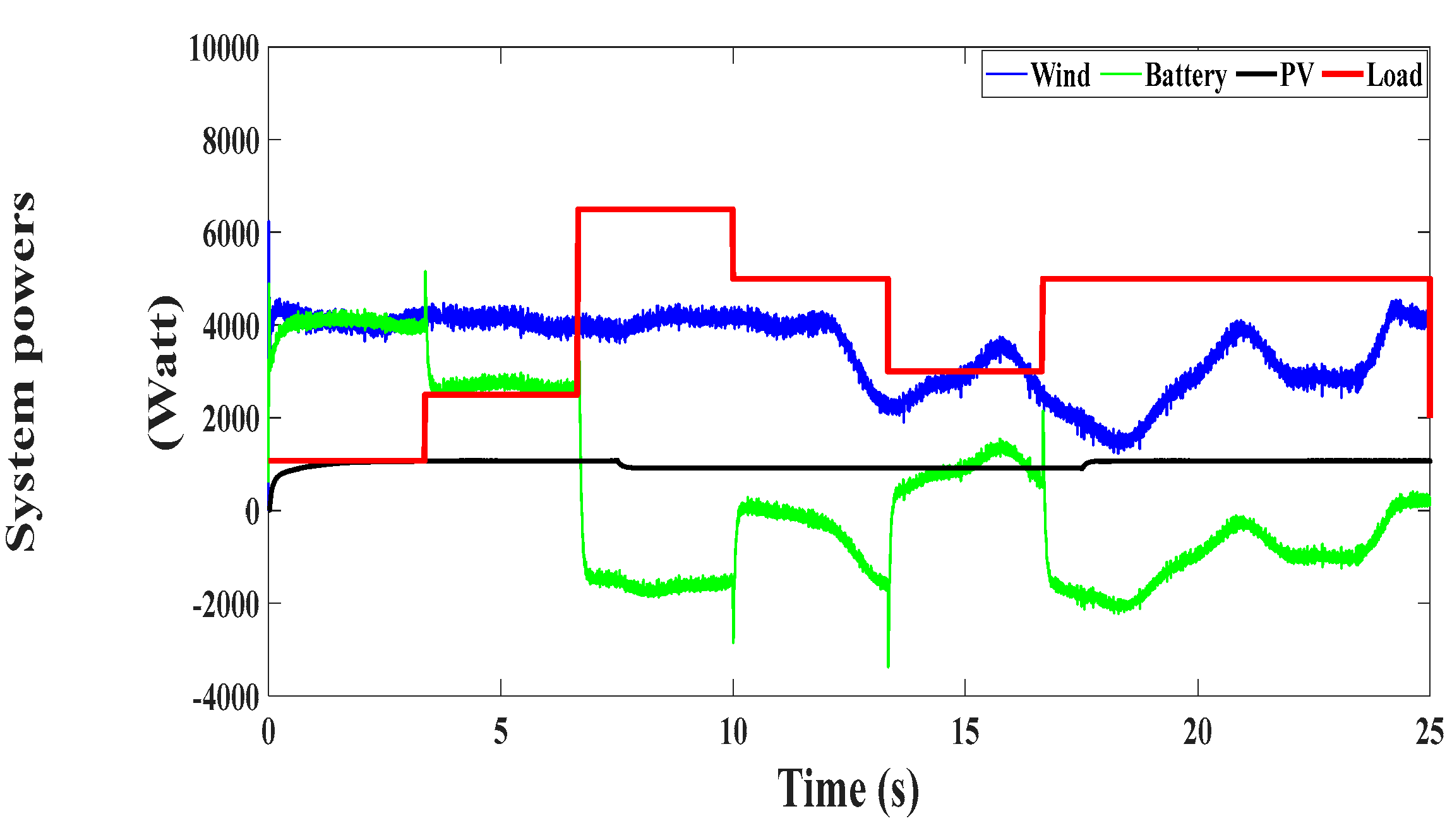
4. Power Management (PM) Topology for Standalone Operation
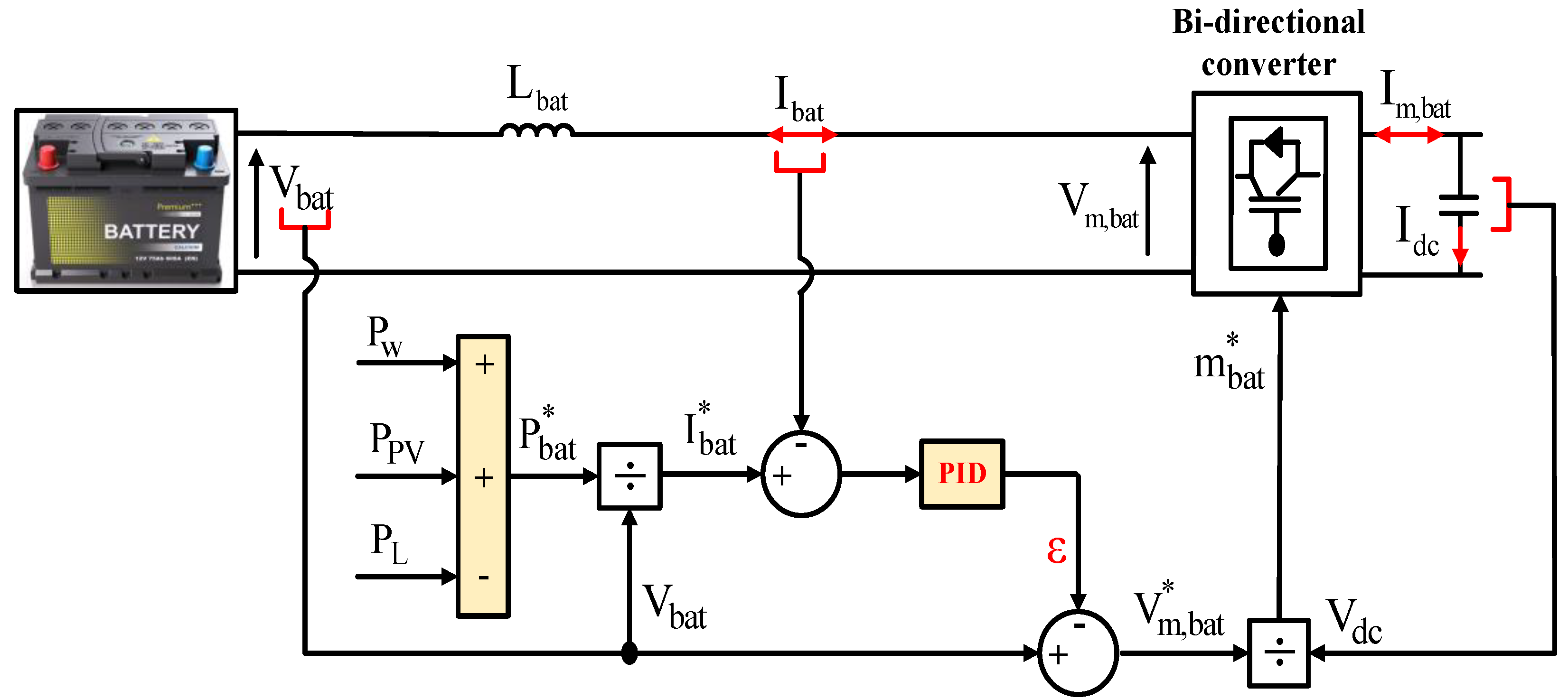
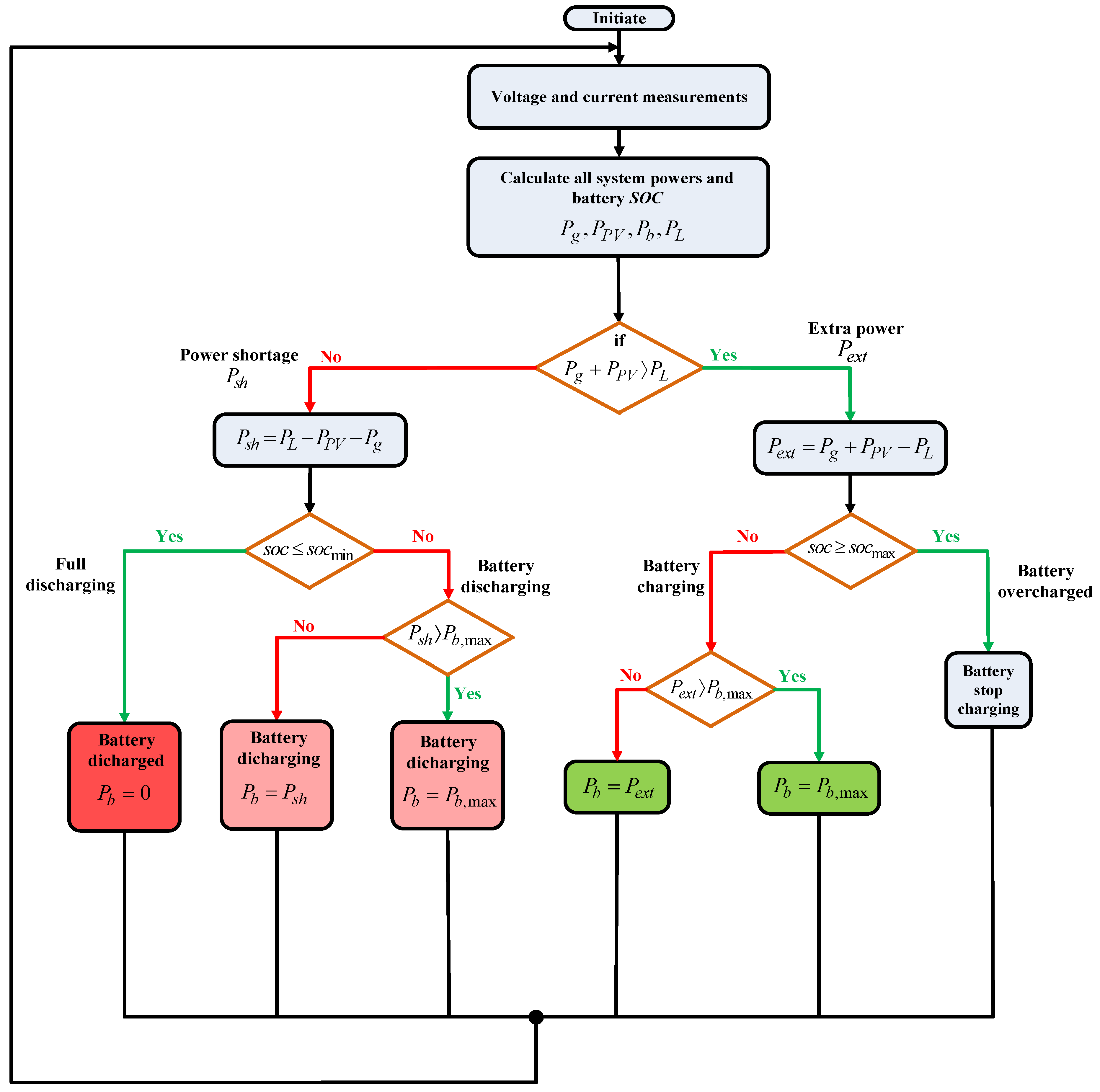
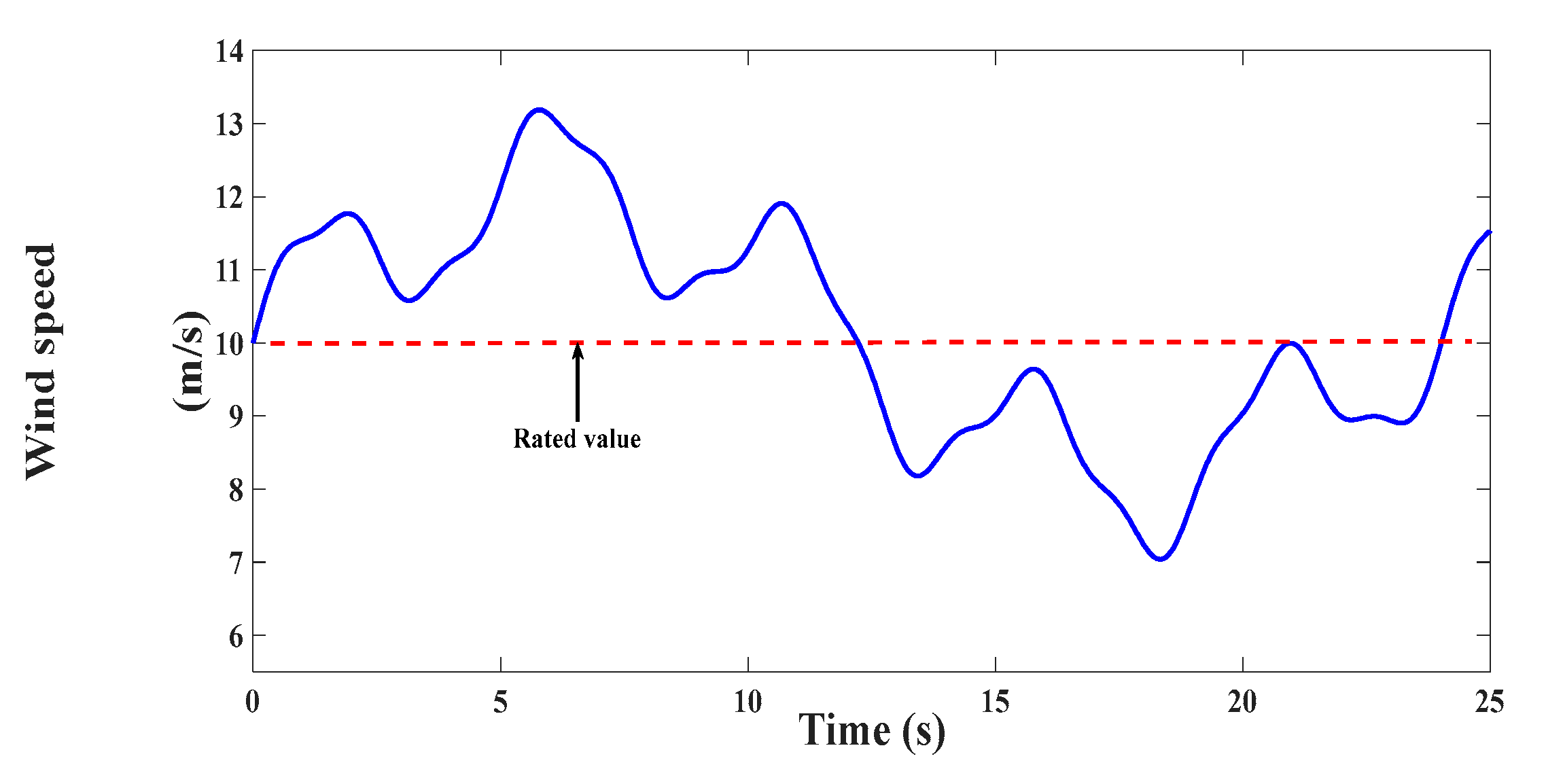
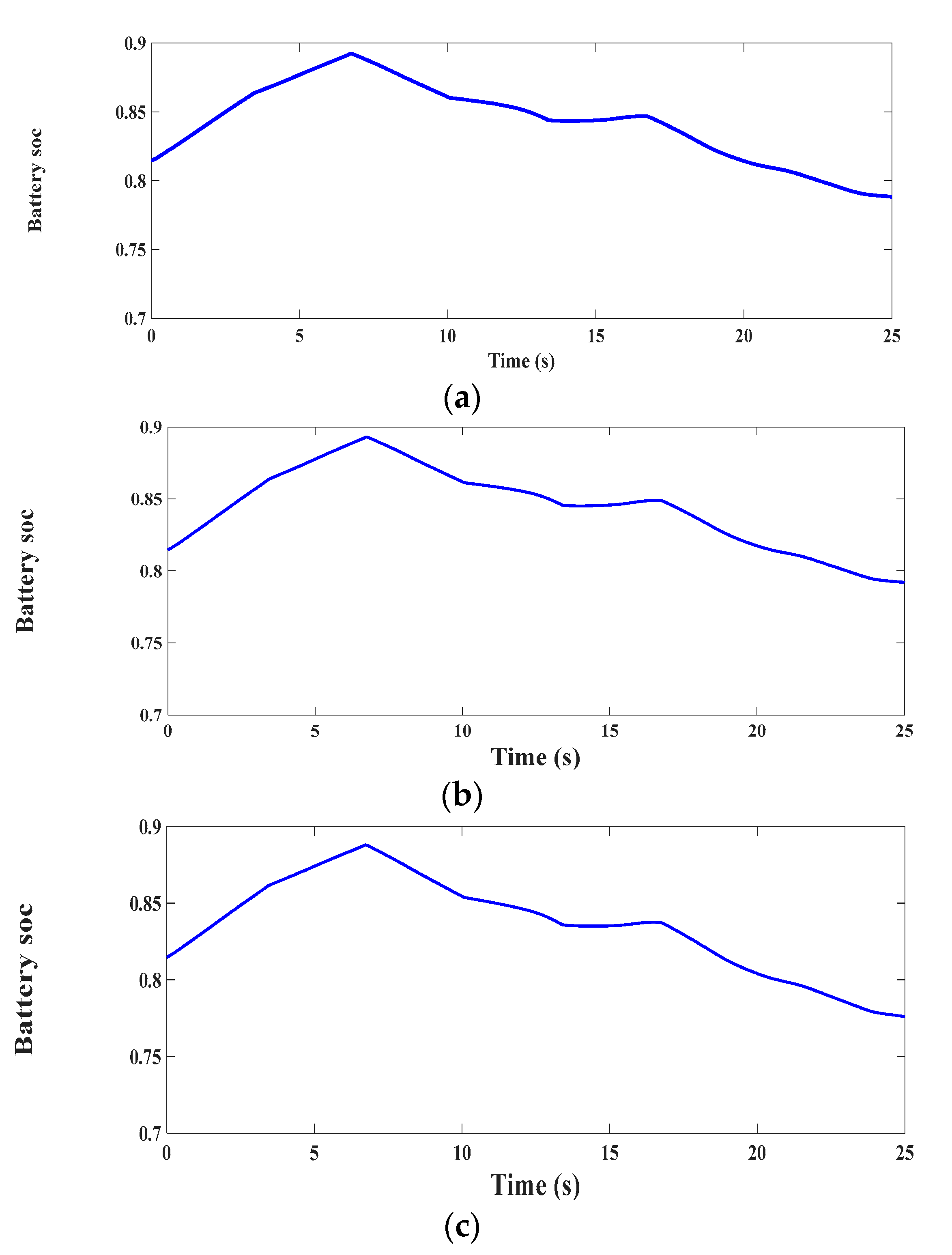
For the standalone operating mode, a particular PM topology is designed to process the solar and wind power systems at full capacity under a variety of environmental situations (i.e., weak wind speed and low irradiation levels). As a result, the PM plan is to balance the power exchange between wind and PV generation systems, battery storage systems, and loads. The PM also regulates the battery’s state of charge (SOC) to prolong battery life.
According to the power flow through the DC connection bus, the power may have various signs. As a result, the PM’s objective is to divide the electricity among these units fairly. The configured PM topology is viewed in
Figure 7, and it is observed that when the extra power
is reached, the extra power
will enter the battery when the net power (
) exceeds the load power
and the condition
is achieved. When the battery is fully charged or
, the extra power cannot be stored and should be restricted. If the produced power
is less than the load, there would be a power shortfall evaluated by
. To counteract the shortage of electricity, the battery will discharge. Due to the finite capacitance, this condition can only be present for a limited period. Calculating the capacity should take into account periods when no energy is provided or when the amount of energy produced is reduced.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






































