1. Introduction
After decades of research and development, communication networks have become critical information infrastructures for economic growth and social progress in today’s world [
1,
2,
3]. In recent years, along with the rapid advancement of artificial intelligence (AI) technology in new communication networks, intelligent applications of the Internet of Everything have been integrated into our lives and continue to drive and deepen a series of application scenarios, such as intelligent vehicle networking, smart industrial networking, smart cities, and smart healthcare [
4,
5,
6,
7]. The development of intelligent applications brings a great demand for network connection, computing, sharing data, and AI capability, and intelligence permeates every corner of the network, from the end user to the network edge and the remote cloud. However, computing, business data, and AI model resources in 5G are usually in mobile edge computing and cloud computing infrastructure [
8,
9,
10]. It is difficult for the network to perceive and control the resources of the cloud AI platform in real-time to provide high-quality AI services with strict delay limitations according to changes in the wireless environment and user attributes. Therefore, the 6G network must consider deep integration with AI in the architecture design stage to natively provide AI capabilities.
The native AI design of 6G needs to consider two aspects of requirements: (1) AI can support high-level autonomy of the network. AI can improve the efficiency of data measurements and decision optimization in the network, then realize fast automated operation, maintenance, detection, and network self-healing [
11]. (2) AI can support intelligent applications in vertical industries. The 6G network should directly provide vertical industry users with quality-guaranteed AI services to create new market value. According to the above requirements, the 6G native AI wireless network is a unified architecture that deeply integrates communication and AI. It should have the ability to process the AI service logic, manage the full life cycle of the AI service, and provide AI services to the network itself as well as vertical industries [
12]. In addition, native AI wireless networks should orchestrate and control the communication, computing, data, and AI model resources in the network, including the core network, radio access network (RAN), and terminals. In collaboration with edge and remote clouds, the native AI wireless networks can quickly adapt to the customization needs of diverse scenarios [
13]. Hence, the 6G network will become the fundamental infrastructure for realizing ubiquitous intelligence to support various AI applications, such as real-time AI inference, distributed learning, and intelligent group collaboration.
One essential advantage of natively providing AI services in 6G networks is that resources can be controlled flexibly and on demand to ensure the quality of AI services (QoAISs) [
14]. Current networks can already guarantee the quality of service (QoS) for communications. Moreover, 3GPP defines QoS-related standards and sets the communication index dimensions corresponding to the QoS, such as bandwidth, delay, jitter, and bit error rate. RAN protocols (such as service data adaptation protocol) will provide users with differentiated network quality assurance services according to preset QoS parameters. However, the 6G native AI wireless network introduces intelligent capabilities, so in addition to the communication performance, the AI service delay, model performance, data redundancy, overhead, privacy, and other aspects need to be considered [
11].
Various studies have investigated how native AI wireless networks can optimize the network itself or provide AI services to third parties [
15,
16]. For these AI services, the accuracy of AI model training is a critical indicator of the QoAIS. Using high-quality data for training can significantly improve the accuracy of the AI model [
11,
17]. However, wireless and computing resources are limited, and more data will lead to more transmission and computing delays. Therefore, the QoAIS needs to include at least two indicators: the accuracy of the AI model and the delay of the AI service. To provide better QoAIS services, a reasonable task scheduling and resource allocation scheme should be designed to optimize the QoAIS. One way is to weigh the above two indicators and propose a single-objective optimization problem. However, when the network protocol configures the QoAIS, each of its indicators may have a threshold value. However, the weights in the single-objective optimization problem are fixed in advance, so it is challenging to select the optimization scheme precisely according to the QoAIS.
On the other hand, the AI models required by AI services are specific. For example, target recognition services for autonomous driving requires models such as the region-based convolutional neural network (R-CNN) and you only look once (YOLO). The operation of these models is based on the corresponding AI development framework (e.g., PyTorch, TensorFlow) and will be equipped with related dedicated AI acceleration hardware [
18]. Before the AI service is provided, the corresponding environment and hardware need to be pre-configured and installed in the network. Limited by space and cost, it is difficult for a single network node to be equipped with the AI models required by all AI services. Therefore, when designing the task scheduling and resource allocation scheme for AI service, it is necessary to consider the collaboration between network nodes.
To this end, this paper considers a task scheduling and resource allocation scheme for AI training services in 6G native AI wireless networks to optimize the QoAIS, including the accuracy of training AI models and the delay of AI services. According to the wireless channel conditions of the network, the computing resources, and the type of AI model stored by each node, an effective mechanism is needed to select the appropriate data quality, bandwidth allocation, and node to complete the task of the AI service. Because of the conflict between the two indicators of the QoAIS, a single-objective integer programming problem is proposed to optimize the QoAIS. Further, considering the QoAIS configuration of network protocols, we transform this problem into a multi-objective optimization problem. Considering the computational complexity, we use the genetic task scheduling and resource allocation (G-TSRA) algorithm and the non-dominated sorting genetic task scheduling and resource allocation (NSG-TSRA) algorithm to solve the proposed problems. The main contributions of this paper are as follows.
We propose a 6G native AI wireless network architecture for AI training services, which can reasonably utilize unevenly distributed wireless, computing, and AI model resources to provide AI services. Based on this architecture, the task scheduling and resource allocation schemes of AI training services are studied.
We formulate the QoAIS optimization problem as a single objective integer programming optimization problem to jointly optimize accuracy and delay. Then a heuristic G-TSRA algorithm is proposed to solve the problem.
We further propose a multi-objective QoAIS optimization problem to facilitate the QoAIS configuration of network protocols. The NSG-TSRA algorithm is designed to obtain the approximate Pareto-optimal set of AI task scheduling and resource allocation.
The performance of our proposed G-TSRA and NSG-TSRA is evaluated through extensive simulations. Numerical results validate the effectiveness and superiority of our proposal compared with the benchmark schemes in terms of AI model accuracy and AI service delay.
The remainder of this paper is organized as follows. We first present the related work in
Section 2. Then, we describe the model of the native AI wireless network for AI training services in
Section 3. The single objective QoAIS optimization problem and G-TSRA are proposed to solve it in
Section 4. Further, we present the multi-objective optimization problem and develop the NSG-TSRA in
Section 5. Finally, we demonstrate the numerical results in
Section 6 and conclude this paper in
Section 7.
2. Related Work
Building native AI capabilities in a 6G network can improve operation efficiency, reduce maintenance costs, and enhance user experience. On the other hand, 6G networks can utilize native AI to provide ubiquitous and easily accessible AI services for various industries and users. Driven by such benefits, native AI has recently attracted significant attention from the industry and academia. In [
15], Wu et al. proposed the AI-native network slicing architecture, through the synergy of artificial intelligence and network slicing, to promote intelligent network management and support AI services in 6G networks. In [
19], Hoydis et al. presented a 6G AI-native air interface designed in part by AI to enable optimized communication schemes for any hardware, radio environments, and applications. In [
20], Soldati et al. identified two critical factors for the effective integration and systematization of AI in the future RAN system: the design of AI algorithms must aim to promote the entire RAN environment, and the RAN system must be equipped with an advanced and scalable learning architecture. Due to the current network slicing architecture not being native AI, the heterogeneity of the slicing arrangement is difficult to adapt to the machine learning paradigm. Therefore, Moreira et al. in [
21] proposed and evaluated a distributed AI-native slice orchestration architecture that can provide machine learning capabilities in all life cycles of network slices. In [
12], the 6G Alliance of Network AI (6GANA) offers the essential technical features needed for the native AI architecture of the 6G network, including the self-generation of use cases, QoAIS, task-oriented scheme, etc. A unified architecture is expected to provide quality-guaranteed AI services for the network and third-party users.
Compared with cloud AI providers, AI services provided by 6G native AI wireless networks have the advantage of guaranteed service quality. In 5G networks, 5QI (5G QoS identifier) is a parameter used to identify different service quality requirements [
22]. The value range of 5QI is 1–255, and each value corresponds to a set of preset performance values, including default priority level, packet delay budget, packet error rate, etc. Network operators configure QoS according to user requirements and network resource conditions. According to the combination of different performance values represented by 5QI, the wireless network protocol provides communication services of different qualities, such as low-latency services, high-reliability services, and high-speed broadband services. For AI services provided by 6G networks, the service quality dimensions will be further expanded, such as the delay of AI services, the accuracy of AI models, communication overhead, computing overhead, data privacy, etc. Therefore, studying the available QoAIS optimization methods for wireless network protocols is necessary.
There have been some studies focusing on the training accuracy of AI models. In [
23], Liu et al. proposed an improved particle swarm optimization algorithm (LK-PSO), aimed at the scheduling problem of AI data-intensive computing tasks in the Internet of Things, to effectively improve the scheduling performance of AI data-intensive computing tasks in the edge environment From the perspective of edge intelligence systems, Wang et al. in [
24] proposed a deep neural network (DNN) layer-partitioning-based fine-grained cloud–edge collaborative dynamic task scheduling mechanism to greatly reduce the average task response time and deploy more complex DNN models in cloud–edge systems with limited resources.
Based on the above discussion, although there are currently some studies on AI task scheduling, most focus on optimizing model training in resource-constrained networks and only consider AI task delay. Therefore, this work, driven by native AI, proposes an efficient task scheduling and resource allocation scheme for AI training services. Considering the dynamic changes of wireless networks, heterogeneous resources, and data distribution, this work optimizes the accuracy and completion delay of AI training simultaneously and provides QoAIS multi-dimensional indicators that 6G wireless network protocols can use.
3. System Description
The architecture of native AI includes the import of user requirements, the analysis of requirements to QoAISs, the full life cycle management and scheduling of the multiple resources of AI tasks, and the final delivery results. In this paper, we focus on scheduling the multiple resources of AI. In this section, we describe the native AI wireless network model for AI training services, including the communication model, the computation model, and the AI training model.
3.1. System Model
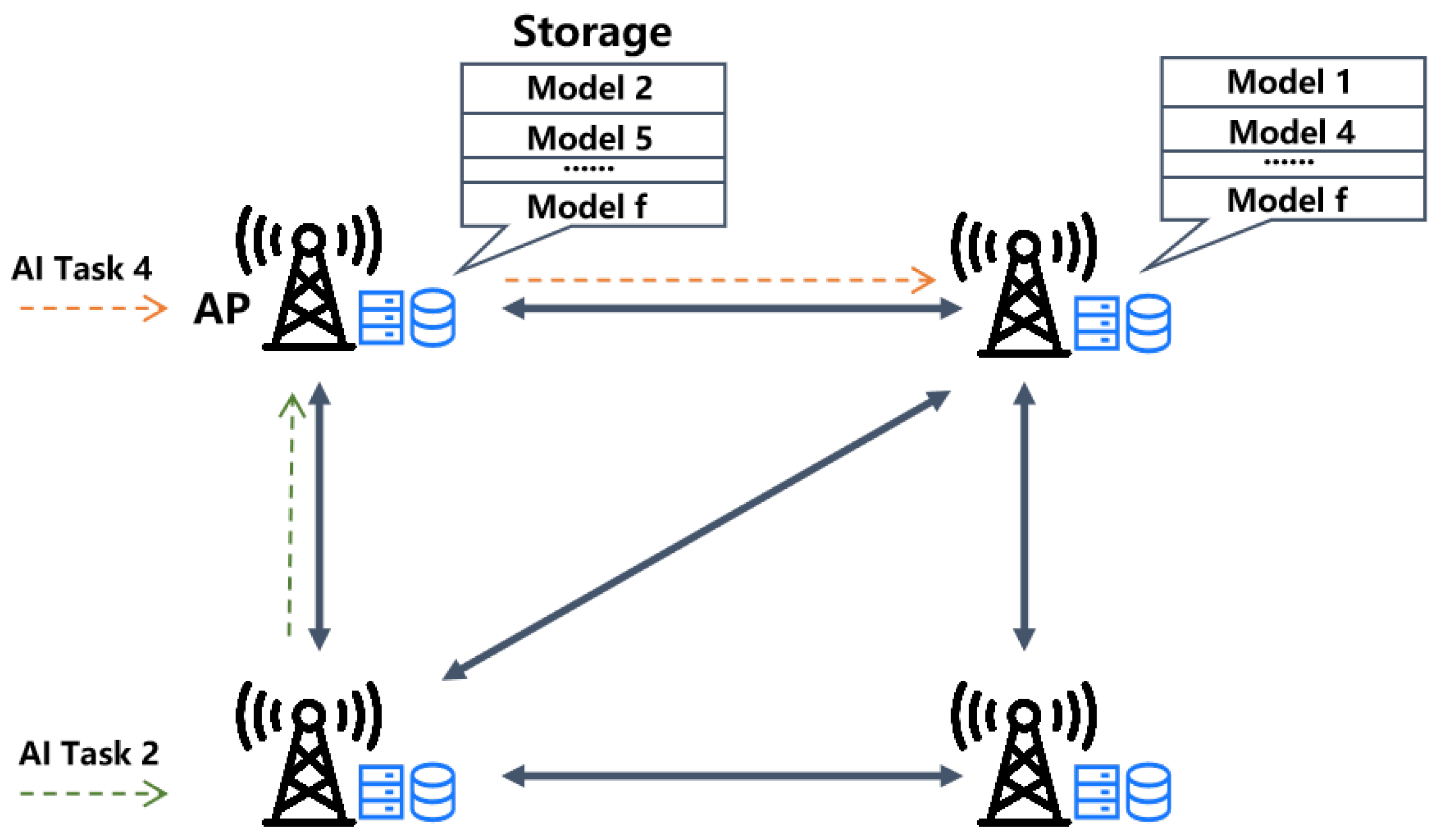
As shown in
Figure 1, we consider a 6G native AI wireless network to provide various AI training services. A set of APs (access points) is distributed in an interested area. The APs are connected through wireless channels. Each AP can cover multiple areas, such as roads, parks, factories, etc. Users in these areas will have different service requirements for AI model training, such as pedestrian detection and fire monitoring. Due to limited local resources, users expect the AP to provide AI training services.
Each AP is equipped with hardware to provide communication, computing, data, and AI model resources for AI training tasks, including antennas, computing servers, and AI model caches. After the AP receives the task request, it can obtain the data required for AI training from the user. For each type of AI training, multiple data quality levels can be selected. As the performances of AI training results, such as DNNs, are closely related to the quality of data used for training, APs can request the highest quality data possible according to the remaining resources to obtain better training results. On the other hand, the type of AI training task corresponds to the type of AI model. Due to the resource capacity limitations, the AI model required for an AI task may only be stored in a few APs. When the AP stores the required AI model resources, the AI model training will be completed locally. When an AP does not store the AI model that matches the task, the AP will transmit the data through its antenna to another qualified AP for processing.
In order to obtain global information and output better decisions, a software-defined network (SDN)-enabled controller is installed at a base station (BS) to centrally make the task scheduling and resource allocation decisions over its coverage area. At each time slot, the AP receives AI service requests containing type information and reports them to the BS along with channel conditions. The BS makes task scheduling and resource allocation decisions based on the collected information, and sends the decisions to the corresponding AP. The AP selects the data quality of users’ AI tasks and sends them to the corresponding AP for execution based on the decision.
Denote the set of APs as . To clearly describe the connection relationship between different APs, we choose i and j as the indices of different APs, . In time slot t, AP i obtains M kinds of AI training tasks. According to the storage of AI model resources, tasks can be processed locally or in the corresponding AP j. For each AP, the task is denoted by . The set of AI models stored by AP j is denoted by . To ensure the successful execution of the task, AP j must store the AI model required by task m, which is , where is the type of task m.
is a binary decision variable that denotes whether the task m of AP i is transmitted to AP j. Each task can only choose one AP to be processed at time slot t, given by .
3.2. Communication Model
The task scheduling between AP
i and
j is facilitated through wireless communications. According to [
25], the data transmission rate between AP
i and
j can be calculated as
where
is the bandwidth of AP
i allocated to task
m.
is the signal-to-noise ratio (SNR) between the two APs.
where
is the transmission power of each link,
is the channel gain, and
is the noise power.
Each type of task has different qualities
b, denoted by
. The data size of task
m in AP
i is
, where
is the amount of data per unit level related to the task type. Hence, the transmission time is given by
3.3. Computation Model
After receiving tasks from other APs, AP
j will allocate computing resources to each task according to their requested CPU cycle
:
where
is the CPU cycle for each bit of the data, and
denotes the number of training iterations determined by AP
i at time slot
t.
The total computing resource of each AP
j is
. Hence, the computing resource
allocated to task
m of AP
i is given by
Consequently, the computing delay is calculated as
3.4. AI Training Model
After allocating computing resources, the AP will use task data for AI training, and output the trained AI model. The training of an AI model is the training of a large number of data samples. In typical AI training, for a data sample
with a multi-dimensional input feature
, the goal is to find a model parameter vector
that represents the labeled output
with a loss function
. The loss function of a local dataset with a number of
D data samples can be defined as
where
is a regularizer function and can be given as
;
.
Denote
as the optimal model parameter for AP
i. AP
i trains its local AI model in an iterative manner [
26]:
The performance of an AI model can be evaluated using the accuracy of the model, denoted by
. The accuracy of AI models is related to the allocated computing resources, the quality/size of data, the number of training iterations, the learning rate, the algorithm used for training, and so on. Similar to [
11], the accuracy of AI model
m of AP
i processed by AP
j satisfies
where
and
v are weight factors.
is the allocated computing resource to each task.
is the learning factor that reflects the marginal revenue of iterations and depends on the selected learning algorithm.
To assess the quality of the solution, the local
accuracy satisfies
Here, the implementation of needs to find the exact maximum, while means that no improvement is achieved in AP.
6. Numerical Results and Discussion
In this section, we simulate the performance of the proposed single and multi-objective QoAIS optimization scheme for AI training services in the 6G native AI wireless network. Specifically, the number of APs is 5, and each AP can accept 2 different types of AI tasks. There are three quality data levels, and the corresponding data size is Gbit. The computing capacity of each AP is randomly distributed in Gcycle/s. Each AP cache has two or three types of AI models, and the set of AI models in all AP caches meets the needs of all tasks. The SNR between two APs is randomly distributed in dB. The bandwidth of each AP is 200 MHz and the number of sub-channels is 4.
For the parameter settings of the G-TSRA and NSG-TSRA algorithms, the population size is 100. The number of iterations is 1000 for G-TSRA and 200 for NSG-TSRA. The number of genes in each individual and the value range of each gene are set according to the above network parameters. The crossover probability parameter is 2. The probability of mutation is 0.1 for G-TSRA and 0.08 for NSG-TSRA.
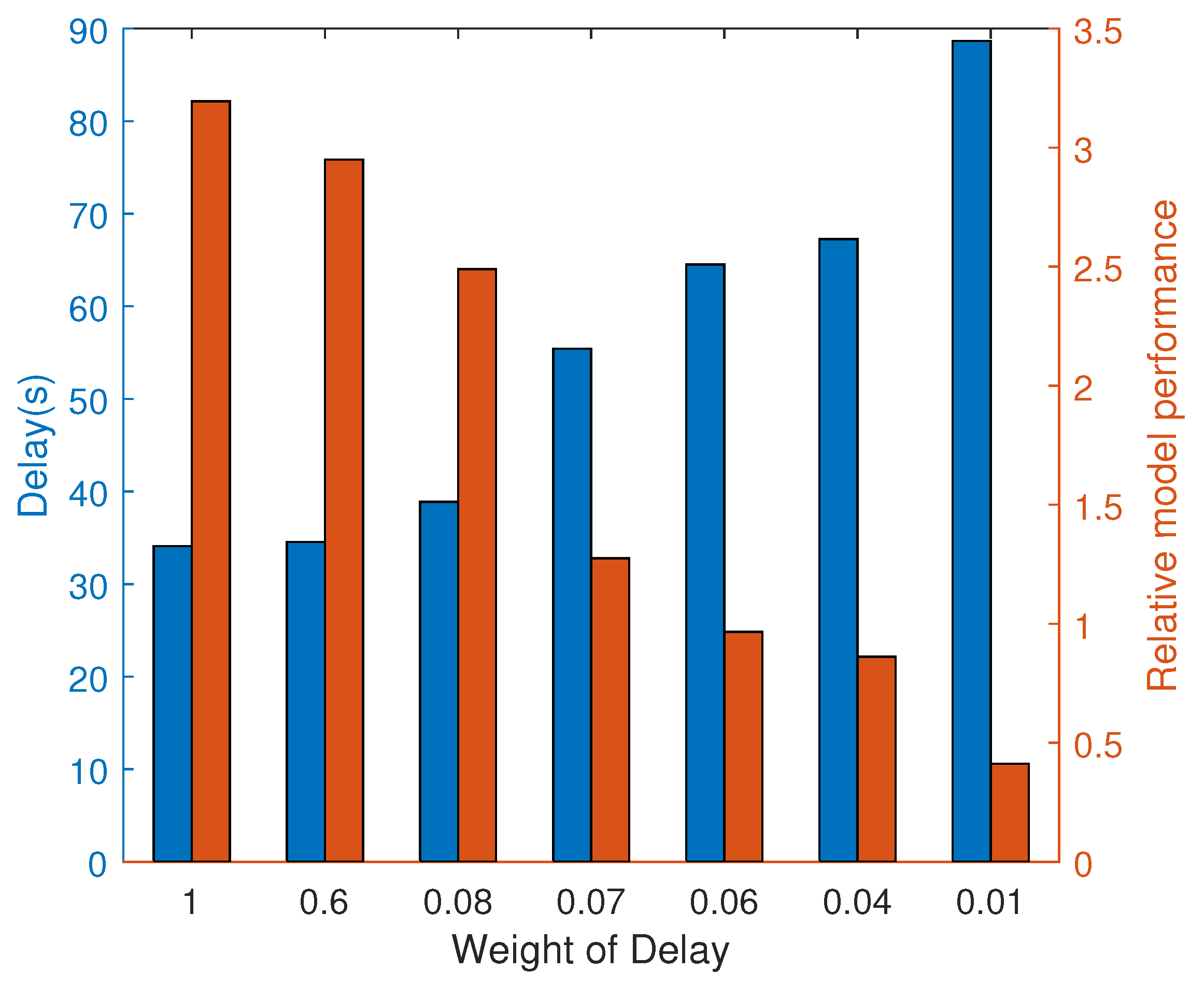
Figure 3 shows the performance of G-TSRA as the
weight changes.
is randomly distributed in
. The algorithm converges around 250 iterations, and the delay and accuracy performances are obtained. The delay gradually increases as the weights decrease while the relative model performance decreases. This is because the weight belongs to the delay, so the weight reduction means that the delay’s importance is gradually reduced compared to the relative model performance. The algorithm will tend to optimize the relative model performance. The figure shows that the performance changes drastically when the weight value drops from 0.08 to 0.07, while the change between 1 and 0.6 is relatively stable. Therefore, the performance does not change continuously and smoothly with the weight value, so it is impossible to determine the required QoAIS by presetting the weight value before the algorithm is executed.
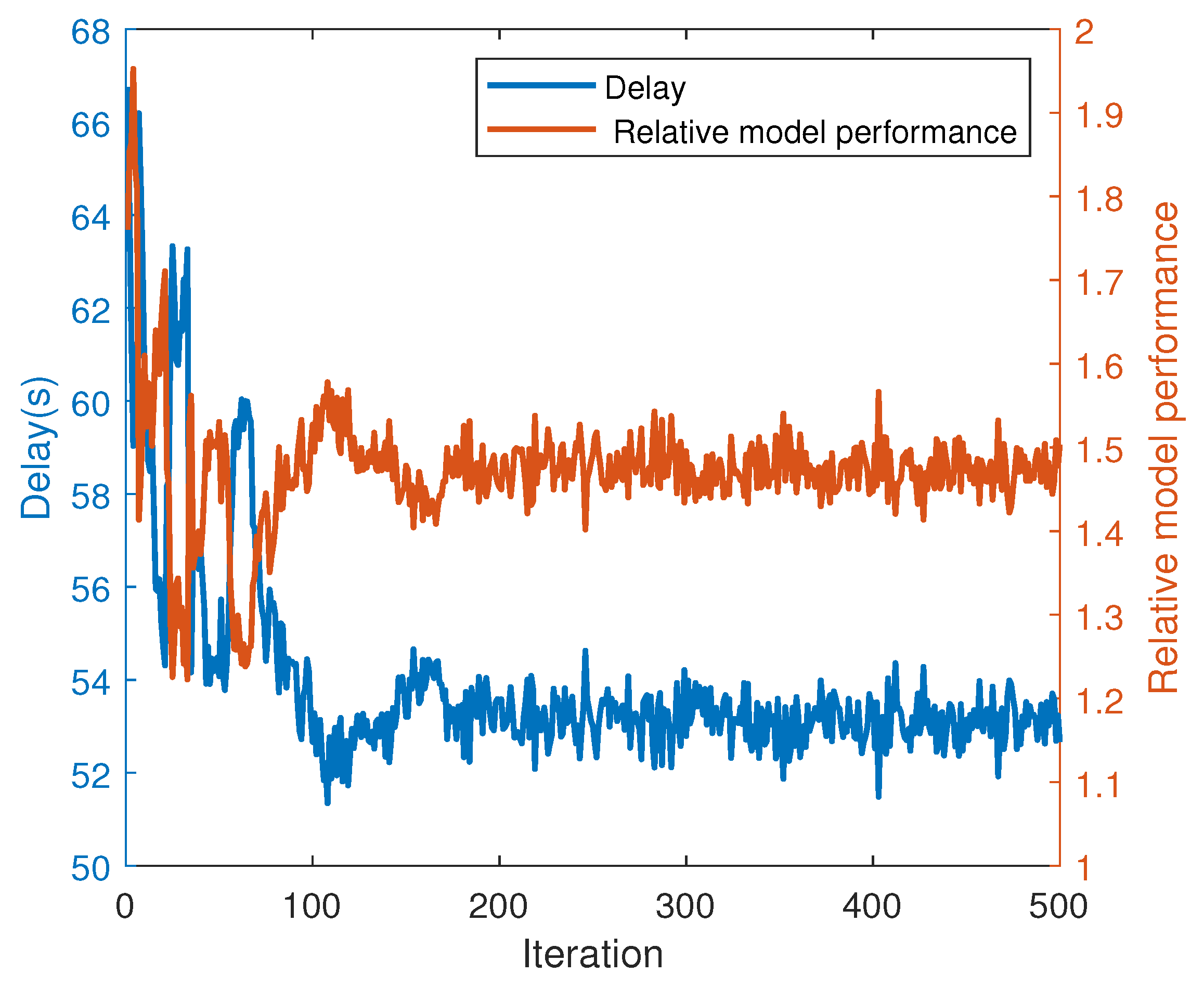
Figure 4 shows the convergence of the proposed NSG-TSRA algorithm. Since the proposed optimization problem is multi-objective, the output of each iteration is a set of solutions. Thus, the convergence trend is shown by calculating the average delay and the average relative model performance of the population, but each value is the sum of the delay and relative model performance of the 10 tasks. At the initial population, both latency and relative model performance are high. As the number of iterations increases, the performances of the two optimization objectives gradually decrease in the fluctuations. Due to exploration, the latency is minimized at 110 iterations at the cost of training accuracy. Finally, the performance reaches convergence at 190 iterations.
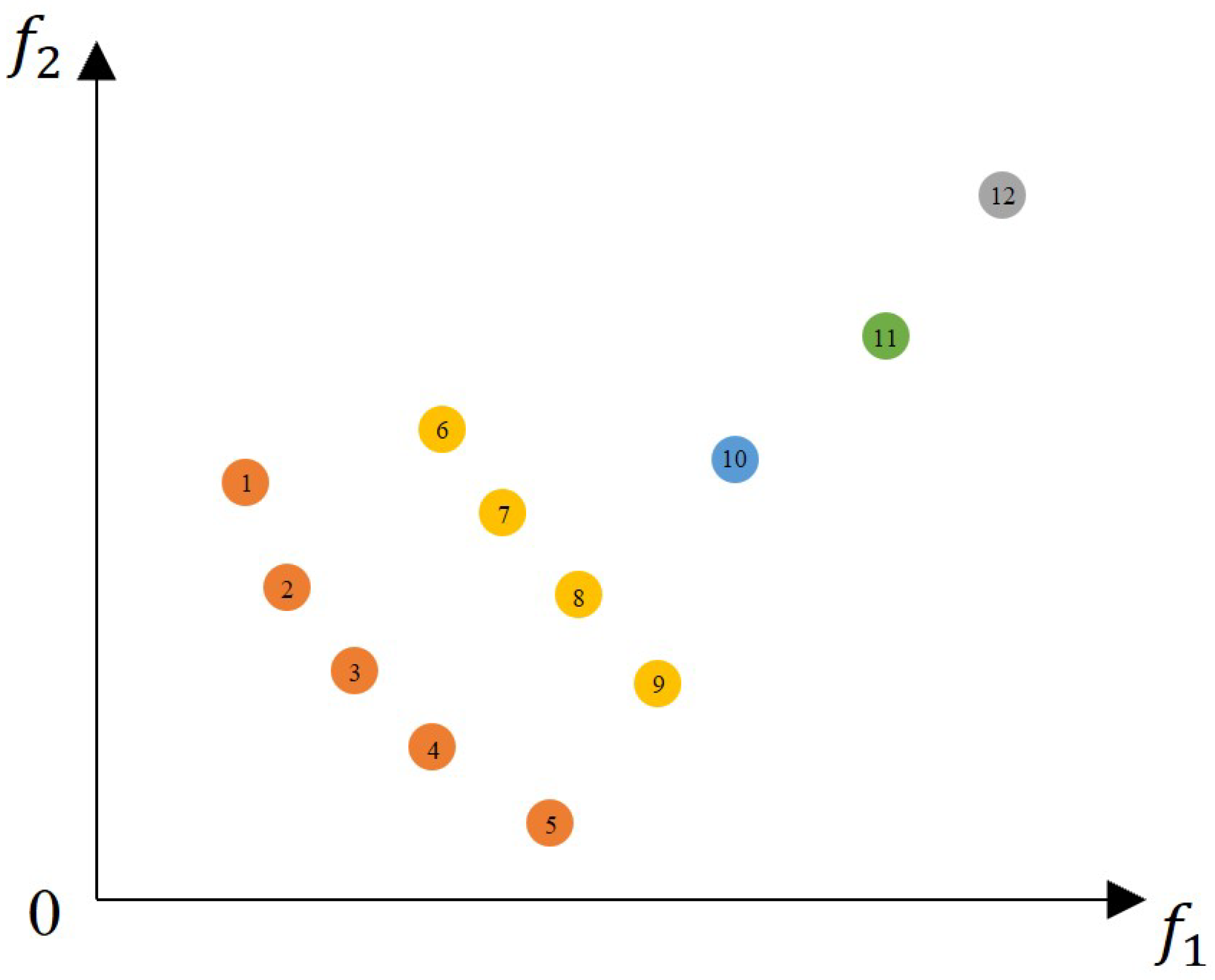
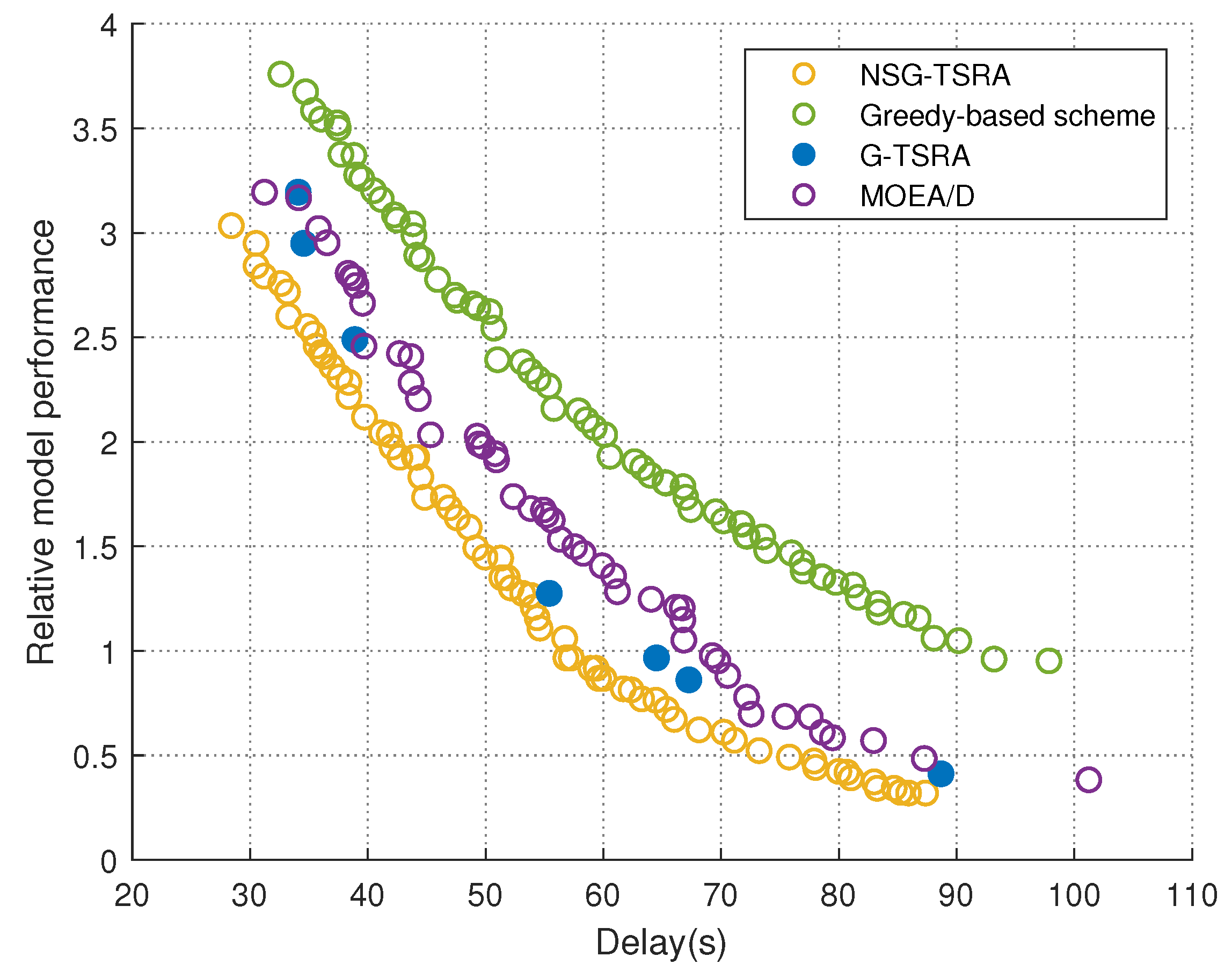
In
Figure 5, we investigate the performances of G-TSRA, NSG-TSRA, the multi-objective evolutionary algorithm based on decomposition (MOEA/D) [
29], and the greedy-based scheme. The greedy-based scheme selects the training node for the AI task based on the product of the computing performance of the node and the channel conditions from this node to all other nodes. Moreover, the maximum selection numbers are set for each training node, which can prevent a decline in performance due to the large number of tasks selected for the same node.
Figure 5 shows that the performance of the Pareto solution of the NSG-TSRA-based scheme is better than that of the greedy-based scheme. The performances of G-TSRA and MOEA/D are slightly worse compared to NSG-TSRA.
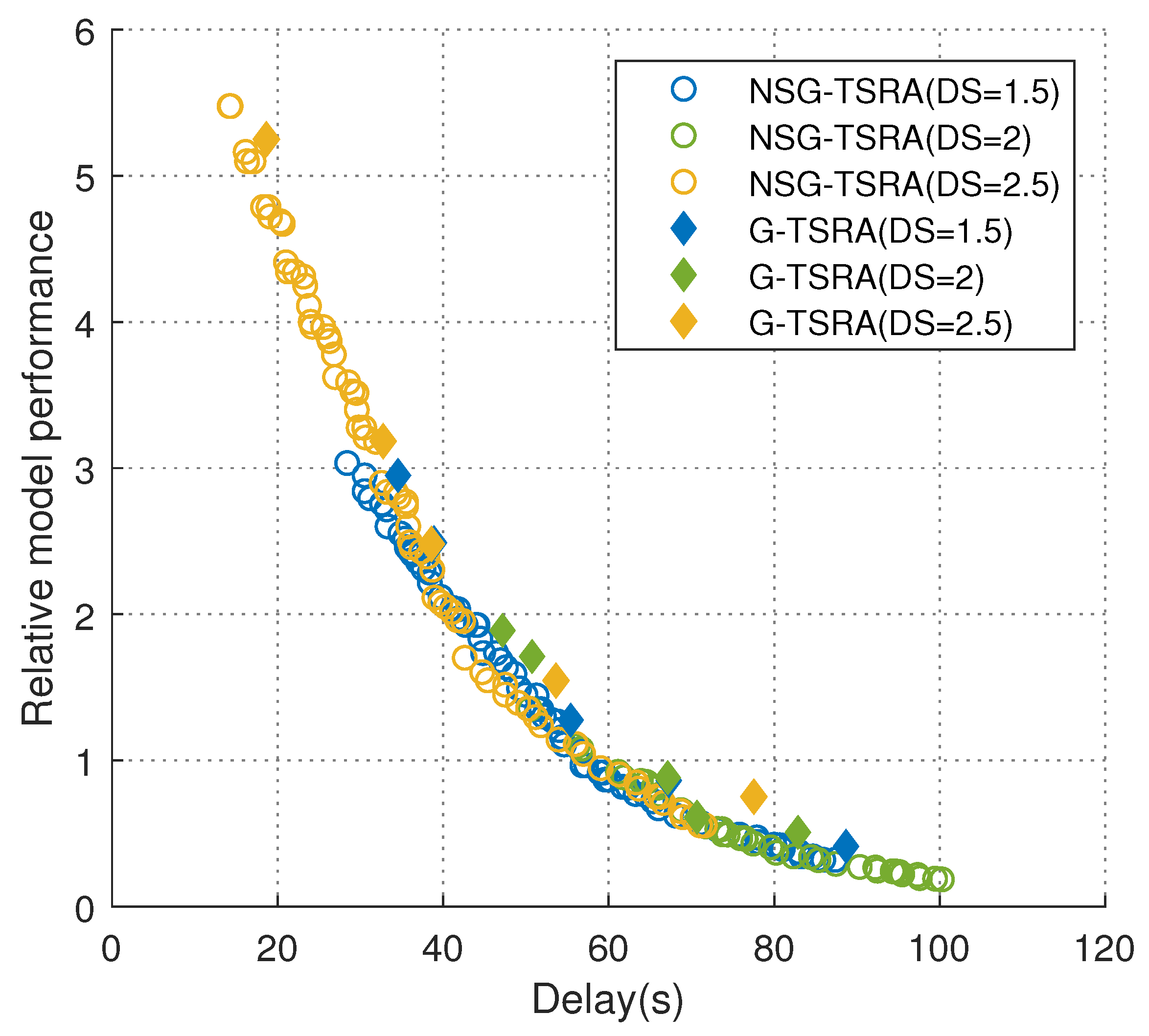
In
Figure 6, we investigate the performances under different data sizes, which are
,
, and
Gbit. The delay in task completion increases with the data size, but the accuracy of the trained model also increases. Since the value ranges of the data sizes partially overlap, the data sizes are similar under some specific data quality selections. Therefore, the different curves will partially overlap.
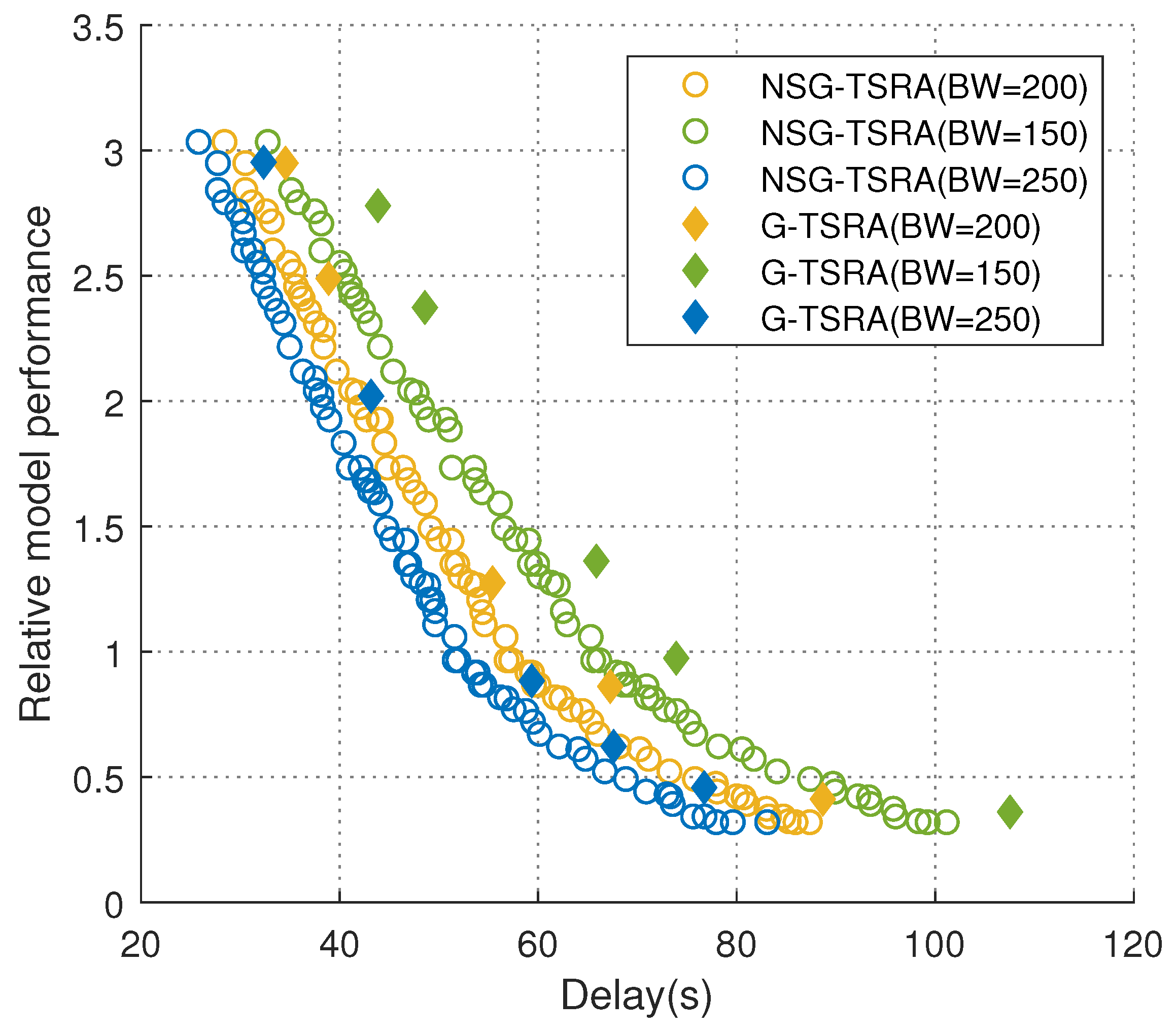
In
Figure 7, we investigate the performances under different bandwidths, which are 150, 200, and 300 MHz. With the same relative model performance, the task completion time decreases as the bandwidth of the AP increases. Since the bandwidth mainly affects the transmission rate, even if the transmission delay has an impact on the selection of APs, the impact on the performance of the final relative model is still limited. Under the parameter settings of different bandwidths, there is no overlapping part of the Pareto solution sets.
In
Figure 8, we investigate the performances under different numbers of APs, which are 4, 5, and 6. The computing resources and channel conditions of APs are generated randomly, with the average AP computing resources and channel gain gradually decreasing. With the same relative model performance, the task completion time increases with the number of APs. The analysis is as follows: as the number of APs increases, the resources in the network increase. However, the number of requests also increases, and the decline in average resources caused by random generation in the simulation leads to a decrease in overall performance.
Based on the above analysis, the multi-objective QoAIS optimization scheme performs better than the single-objective optimization scheme. It can output an unbiased solution set that is more suitable for the QoAIS guarantee in 6G native AI wireless networks.
7. Conclusions
This paper proposes a QoAIS optimization method for AI training services in 6G native AI wireless networks. To improve the accuracy of AI models and reduce task latency, we formulated a single-objective integer programming problem to obtain reasonable task scheduling and resource allocation decisions. Further, to better meet the requirements of various indicators of the QoAIS, we transformed the problem into a multi-objective format, facilitating the configuration of network protocols. We proposed G-TSRA and NSG-TSRA heuristic algorithms to solve the above problems, and performed simulations to demonstrate the feasibility of multi-dimensional QoAIS optimization.
In the future, we will consider more QoAIS dimensions, such as the privacy and security of AI services, to achieve comprehensive QoAIS optimization. In addition, the overhead of AI model scheduling and decision-making are key factors affecting system performance and will be considered in future work.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







