

Low Cost PID Controller for Student Digital Control Laboratory Based on Arduino or STM32 Modules

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
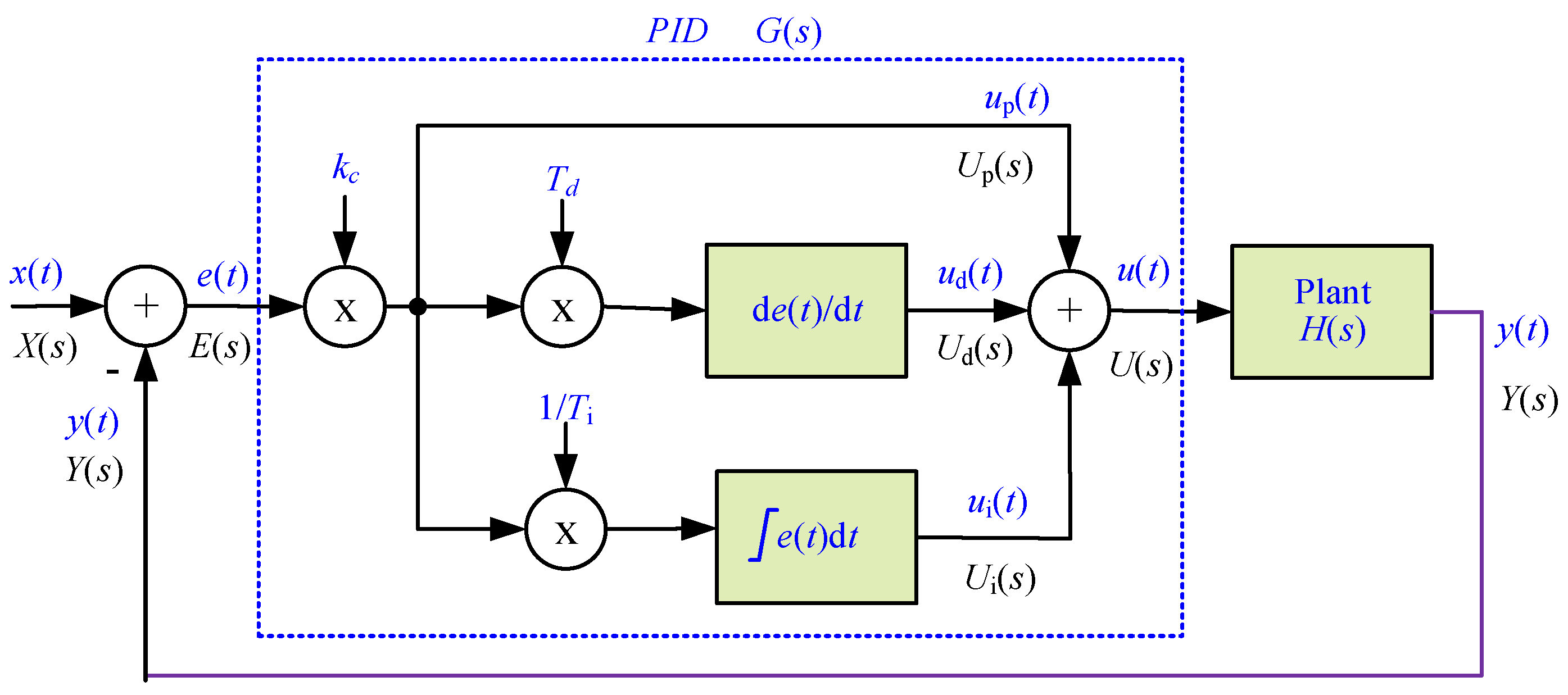
2. Realization of Digital PID Controller
- X(s)—desired process value or setpoint;
- E(s)—error value as the difference between a desired setpoint X(s) and the measured process value Y(s), E(s) = X(s) − Y(s);
- G(s)—controller transfer function;
- H(s)—transfer function of controlled system (plant);
- Y(s)—measured process value;
- U(s)—control variable.
- kc—controller gain, a tuning parameter;
- Td—derivative time, a tuning parameter;
- Ti—integral time, a tuning parameter.
3. Controlled System Simulators
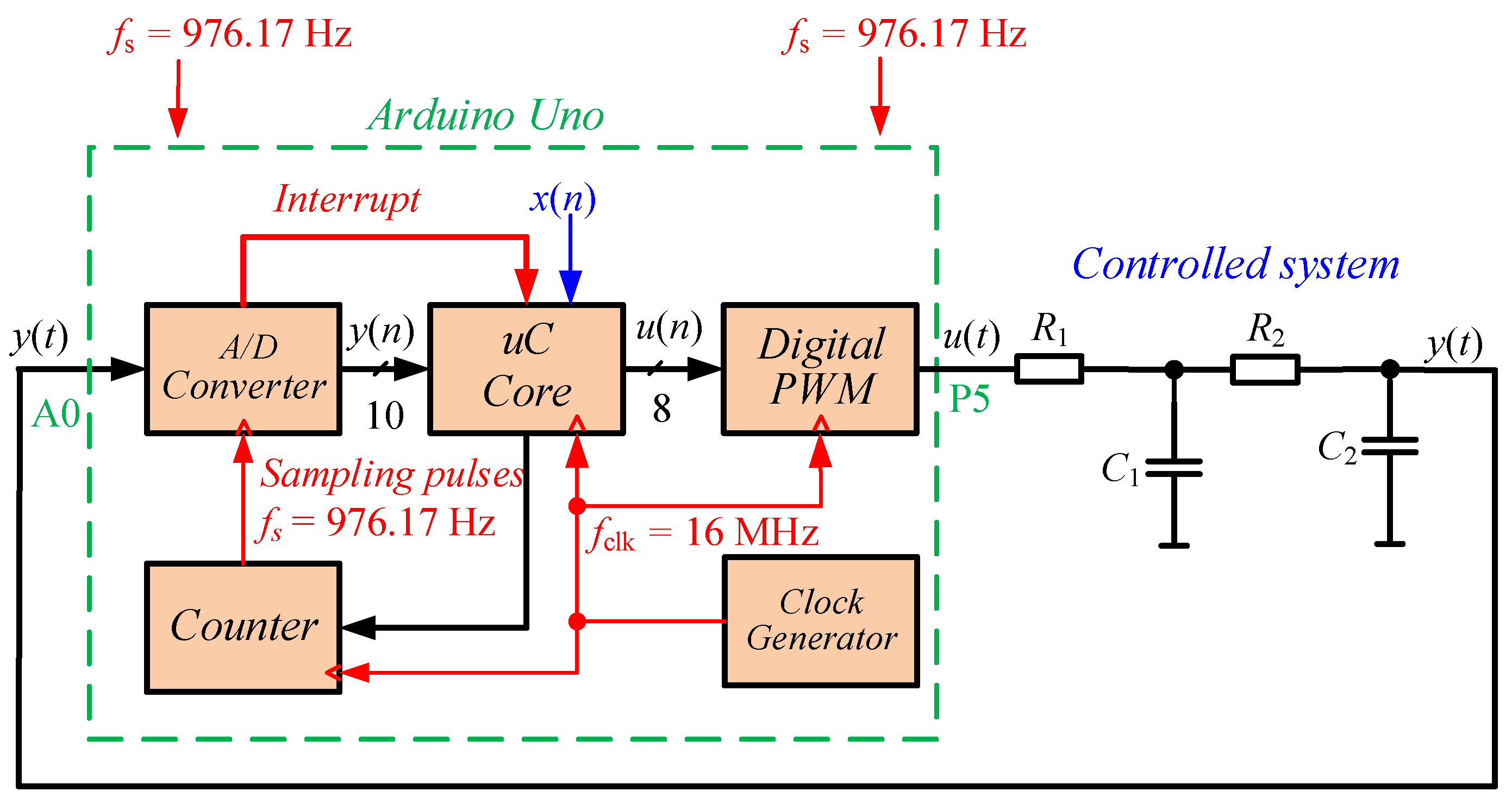
4. Realization of Digital PID Controller Using Arduino Module
| Listing 1. A skeleton version of the program that implements the PID controller. |
| void
setup()
{ // Pin initialization // timer initialization // ADC initialization // interrupt initialization } ISR (ADC_vect) // ADC interrupt, fs= 976.165 Hz { // ADC reading // PID controller calculation // PWM update } EMPTY_INTERRUPT (TIMER1_COMPB_vect); void loop() { // empty main loop } |
| Listing 2. A skeleton version of the program for Serial Plotter visualization of the open-loop system step response. |
| // fsk – Serial Plotter sampling frequency #define fsk 10 const float fs=976.165; // sampling frequency const int Nk=fs/fsk; ISR (ADC_vect) // ADC interrupt, fs= 976.165 Hz { // ADC reading U=1; // PWM update if (counter++>Nk) { Serial.println(y); counter=0; } } |
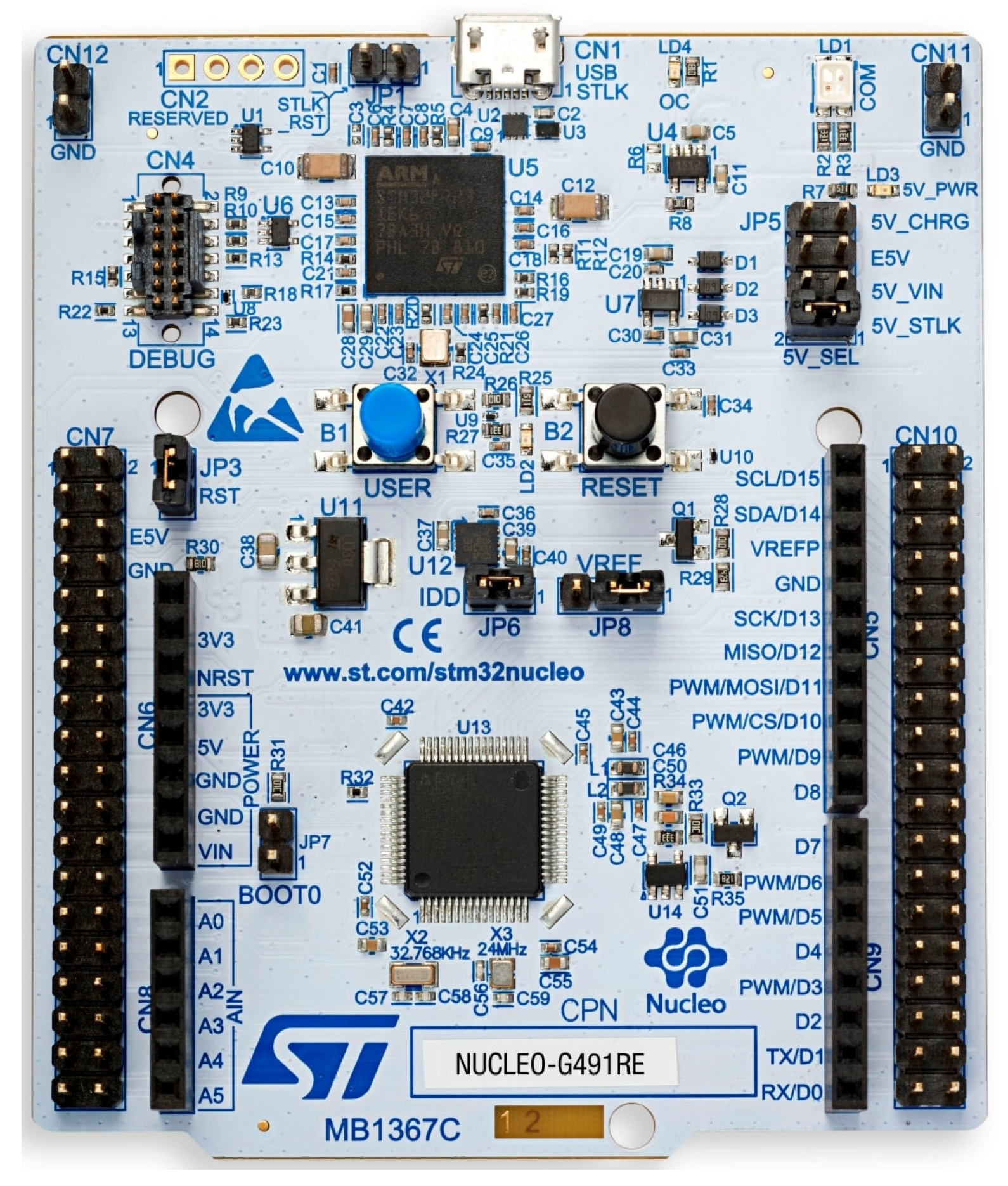
5. Realization of Digital PID Controller Using STM32G491RE-Nucleo
- Initialization of A/D converter—single-ended input pin PA0, Triger Conversion Source, Timer 3, Triger Out event, ADC1 and ADC2 global interrupt;
- GPIO—GPIO_Output PA10, Output Push Pull;
- D/A converter—OUT1 mode, Connected to external pin only;
- Timer 3—Clock source, Internal Clock, Channel1, Output Compare No Output, Counter period, 16000-1, auto-reload preload, enable, Trigger Event Selection TRGO—Update Event;
- Initialization of interrupt system.
| Listing 3. A simplified skeleton version of the program that implements the PID controller. |
| // // Global variable initialization Int main(void) { // Pin initialization // timer initialization // ADC initialization // interrupt initialization /* Infinite loop */ while (1) { // empty loop } } Void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef *hadc) // ADC interrupt, fs= 10kHz { // ADC reading // PID controller calculation // DAC update } |
6. Tuning the PID Controller
7. Students Tasks
7.1. Identification of the Process
7.2. Calculation of the PID Controller Parameters
7.3. The PID Controller Implementation
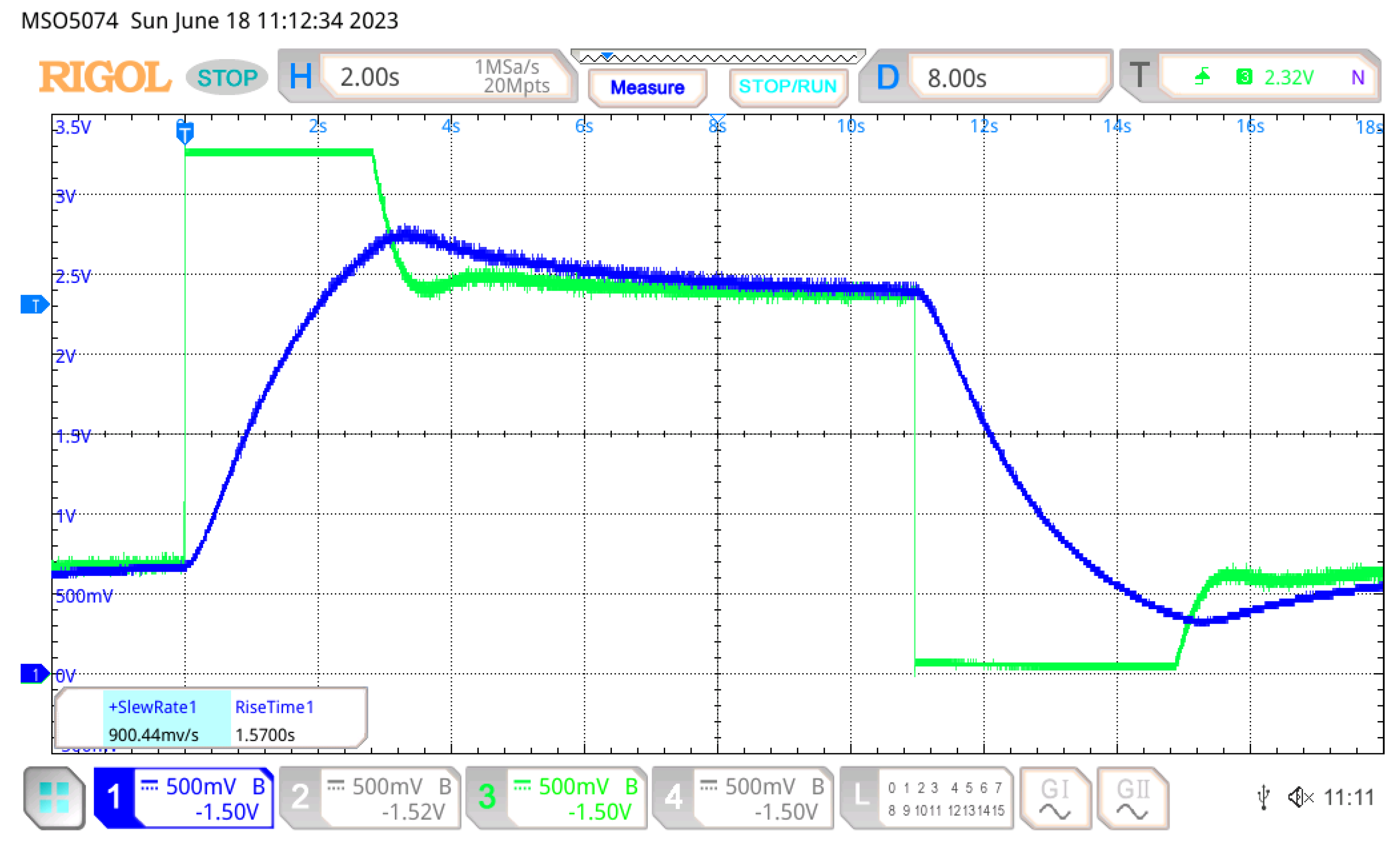
7.4. Testing of Close Loop with PID Controller
7.5. Analysis of the Results
8. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| A/D | Analog-to-digital converter |
| D/A | Digital-to-analog converter |
| DSP | Digital signal processor or digital signal processing |
| MCU | Microcontroller unit |
| PID | Proportional–integral–derivative controller |
| PWM | Pulse width modulation |
| e(t) | Error value |
| f | Frequency |
| fs | Sampling frequency |
| kc | Controller gain |
| τd | Controlled system time delay |
| τp | Controlled system time constant |
| τratio | Defines the speed of response of control system |
| t | Time |
| Td | Derivative time |
| Ti | Integral time |
| Ts | Sampling period |
| x(t) | Desired process value or setpoint |
| y(t) | Measured process value |
| u(t) | Control variable |
Appendix A
| Listing A1. Program implementing PID controller for Arduino Uno. |
| // PID Standard controller, KS 23.05.2023 const byte U_PWMP = 5; // Pin 5, PWM output u(t) const byte Out_PWMP = 6; // Pin 6, PWM output, const byte adcPin = 0; // A0 – analog input y(t) const float fs = 976.165; // sampling frequency const float Ts = 1/fs; // sampling period const float Kc = 2.0; // controller gain const float Ti = 2.5; // integral time volatile float x = 0.7; //setpoint value, range 0...1 const float Td = 1.0; // derivative time volatile float y; // measured process value, range 0...1 volatile float u; // control variable, range 0...1 volatile int upwm=0; volatile int out=0; volatile float e=0; // error value, range -1...1 volatile float e_1=0; // error from the previous cycle, range 0...1 volatile float ui=0; // integral value, range -1...1 volatile float ud=0; // derivative value, range -1...1 volatile float ui_1=0; // value of the integral from the previous cycle, range -1...1 ISR (ADC_vect) // ADC interrupt { digitalWrite(LED_BUILTIN, HIGH); // turn the LED on (HIGH is the voltage level) y=float(ADC/1024.0); // range of ADC 0...1023, // ---- PID controller ------ e=(x-y); ui=Kc/Ti*Ts/2*(e+e_1)+ui_1; // integral term if(ui>1) ui=1; else if(ui<-1) ui=-1; ud=Kc*Td/Ts*(e-e_1); // derivative term u=e*Kc+ui+ud; u=u+x; // works faster ui_1=ui; e_1=e; // --- end of PID controler if(u>1) u=1; else if(u<0) u=0; upwm=(int)(u*255+0.5); out=(int)((e+1)*127+0.5); analogWrite(U_PWMP, upwm); analogWrite(Out_PWMP, out); digitalWrite(LED_BUILTIN, LOW); // turn the LED off by making the voltage LOW } // -------------------- end of ADC_vect ------------------------------------------- EMPTY_INTERRUPT (TIMER1_COMPB_vect); void setup () { pinMode(LED_BUILTIN, OUTPUT); pinMode(U_PWMP, OUTPUT); pinMode(Out_PWMP, OUTPUT); // reset Timer 1 TCCR1A = 0; TCCR1B = 0; TCNT1 = 0; TCCR1B = bit (CS11) | bit (WGM12); // CTC, prescaler of 8 TIMSK1 = bit (OCIE1B); // WTF? OCR1A = 2047; // 976.165Hz OCR1B = 2047; // 976.165Hz - sampling frequency ADCSRA = bit (ADEN) | bit (ADIE) | bit (ADIF); // turn ADC on, want interrupt on completion ADCSRA |= bit (ADPS2); // Prescaler of 16 ADMUX = bit (REFS0) | (adcPin & 7); ADCSRB = bit (ADTS0) | bit (ADTS2); // Timer/Counter1 Compare Match B ADCSRA |= bit (ADATE); // turn on automatic triggering } // end of setup void loop () { // empty main loop } |
References
- National Instruments, myRIO. Available online: https://www.ni.com/pl-pl/shop/hardware/products/myrio-student-embedded-device.html (accessed on 13 June 2023).
- Speedgoat. Available online: https://www.speedgoat.com (accessed on 13 June 2023).
- 8-Bit AVR MCUs, Microchip. Available online: https://www.microchip.com/en-us/products/microcontrollers-and-microprocessors/8-bit-mcus/avr-mcus (accessed on 13 June 2023).
- ARM MCUs, ARM. Available online: https://www.arm.com/ (accessed on 13 June 2023).
- C2000 Real-Time Microcontrollers, Texas Instruments. Available online: https://www.ti.com/microcontrollers-mcus-processors/c2000-real-time-control-mcus/overview.html (accessed on 13 June 2023).
- ADUC84x MCUs. Available online: https://www.analog.com/en/index.html (accessed on 13 June 2023).
- Arduino. Available online: https://www.arduino.cc/ (accessed on 13 June 2023).
- Raspberry Pi. Available online: https://www.raspberrypi.org/ (accessed on 13 June 2023).
- BeagleBone. Available online: https://beagleboard.org/black (accessed on 13 June 2023).
- STM32 32-Bit Arm Cortex MCUs, STMicroelectronics. Available online: https://www.st.com/en/microcontrollers-microprocessors/stm32-32-bit-arm-cortex-mcus.html (accessed on 13 June 2023).
- Available online: https://www.microchip.com/en-us/products/microcontrollers-and-microprocessors (accessed on 1 July 2023).
- Available online: https://mu.microchip.com/ (accessed on 1 July 2023).
- Available online: https://mu.microchip.com/rapid-prototyping-with-the-curiosity-nano-platform (accessed on 1 July 2023).
- Ghassoul, M. Design of Three-Term Controller Using a PIC18F452 Microcontroller. In Renewable Energy; Taner, T., Tiwari, A., Ustun, T., Eds.; IntechOpen: Rijeka, Croatia, 2020; Chapter 17. [Google Scholar] [CrossRef] [Green Version]
- Sun, L.; You, F. Machine Learning and Data-Driven Techniques for the Control of SmartPower Generation Systems: An Uncertainty Handling Perspective. Engineering 2021, 7, 1239–1247. [Google Scholar] [CrossRef]
- Beauregard, B. PID Controller, Arduino, PID-1.2.0.zip. Available online: https://www.arduino.cc/reference/en/libraries/pid/ (accessed on 1 April 2023).
- Daniel, PID Controller, Arduino, PIDController-0.0.1.zip. Available online: https://www.arduino.cc/reference/en/libraries/pidcontroller/ (accessed on 1 April 2023).
- Tillaart, R. PID_RT, Arduino, PID_RT-0.1.6.zip. Available online: https://www.arduino.cc/reference/en/libraries/pid_rt/ (accessed on 1 April 2023).
- Pribičević, Z. mrm-pid, Arduino, mrm_pid-0.0.4.zip. Available online: https://www.arduino.cc/reference/en/libraries/mrm-pid/ (accessed on 1 April 2023).
- Falcons, A. Custom PID, Arduino, Custom_PID-1.0.0.zip. Available online: https://www.arduino.cc/reference/en/libraries/custom-pid/ (accessed on 1 April 2023).
- Beauregard, B. PID_v2, Arduino, PID_v2-2.0.1.zip. Available online: https://www.arduino.cc/reference/en/libraries/pid_v2/ (accessed on 1 April 2023).
- Adjal, A. Embedded Type-C PID, Arduino, Embedded_Type_C_PID-1.1.3.zip. Available online: https://www.arduino.cc/reference/en/libraries/embedded-type-c-pid/ (accessed on 1 April 2023).
- Forrest, D. PID_v1_bc, Arduino, PID_v1_bc-1.2.7.zip. Available online: https://www.arduino.cc/reference/en/libraries/pid_v1_bc/ (accessed on 1 April 2023).
- Thomas, K. PID Controllers Modular Professional Arduino, PID_Controllers_Modular_Professional-1.0.2.zip. Available online: https://www.arduino.cc/reference/en/libraries/pid-controllers-modular-professional/ (accessed on 1 April 2023).
- Lloyd, D. QuickPID, Arduino, QuickPID-3.1.8.zip. Available online: https://www.arduino.cc/reference/en/libraries/quickpid/ (accessed on 1 April 2023).
- Matera, M. FastPID, Arduino, FastPID-1.3.1.zip. Available online: https://www.arduino.cc/reference/en/libraries/fastpid/ (accessed on 1 April 2023).
- cjmccjmccjmc, ControlLoop, Arduino, ControlLoop-1.0.2.zip. Available online: https://www.arduino.cc/reference/en/libraries/controlloop/ (accessed on 1 April 2023).
- Downing, R. AutoPID, Arduino, AutoPID-1.0.3.zip. Available online: https://www.arduino.cc/reference/en/libraries/autopid/ (accessed on 1 April 2023).
- Bruere-Terreault, J. TimedPID, Arduino, TimedPID-1.0.0.zip. Available online: https://www.arduino.cc/reference/en/libraries/timedpid/ (accessed on 1 April 2023).
- Astrom, K.J.; Wittenmark, B. Computer-Controlled System, Theory and Design, 3rd ed.; Prentice Hall, Inc.: Englewood Cliffs, NJ, USA, 2013. [Google Scholar]
- Williamson, D. Digital Control and Implementation; Prentice Hall, Inc.: Englewood Cliffs, NJ, USA, 1991. [Google Scholar]
- Stokes, J.; Sohie, G.R.L. Implementation of PID Controllers on the Motorola DSP56000/DSP56001; Motorola Digital Signal Processors, APR5.pdf; Motorola: Schaumburg, IL, USA, 1996. [Google Scholar]
- Ahmed, I. Implementation of PID and Deadbeat Controllers with the TMS320 Family; Application Report: SPRA083.pdf; Texas Instruments: Dallas, TX, USA, 1997. [Google Scholar]
- Aström, K.J.; Murray, R.M. Feedback Systems; Princeton University Press: Princeton, NJ, USA, 2009. [Google Scholar]
- Sallen, R.P.; Key, E.L. A Practical Method of Designing RC Active Filters. IRE Trans. Circuit Theory 1955, 2, 74–85. [Google Scholar] [CrossRef]
- Karki, J. Active Low-Pass Filter Design; Application Note, SLOA049D; Texas Instruments: Princeton, NJ, USA, 2023. [Google Scholar]
- Gammon Forum. Available online: https://gammon.com.au/forum/index.php?bbtopic_id=123 (accessed on 1 July 2023).
- Catalbas, B.; Uyanik, I. A Low-cost Laboratory Experiment Setup for Frequency Domain Analysis for a Feedback Control Systems Course. IFAC PapersOnLine 2017, 50, 15704–15709. [Google Scholar] [CrossRef]
- Li, J.H. Control System Laboratory with Arduino. In Proceedings of the 2018 International Symposium on Computer, Consumer and Control (IS3C), Taichung, Taiwan, 6–8 December 2018; pp. 181–184. [Google Scholar] [CrossRef]
- Alleyne, A.G.; Block, D.J.; Meyn, S.P.; Perkins, W.R.; Spong, M.W. An interdisciplinary, interdepartmental control systems laboratory. IEEE Control Syst. Mag. 2005, 25, 50–55. [Google Scholar] [CrossRef]
- Jitthammapirom, P.; Chayratsami, P.; Somha, W. Development of Remote Laboratory for Feedback Control System Class. In Proceedings of the 2021 6th International STEM Education Conference (iSTEM-Ed), Pattaya, Thailand, 10–12 November 2021; pp. 1–4. [Google Scholar] [CrossRef]
- McLoone, S.C.; Maloco, J. A cost-effective hardware-based laboratory solution for demonstrating PID control. In Proceedings of the 2016 UKACC 11th International Conference on Control (CONTROL), Belfast, UK, 29 August 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Khan, I.; Żmuda, M.; Konopka, P.; Gustavsson, I.; Håkansson, L. Enhancement of remotely controlled laboratory for Active Noise Control and acoustic experiments. In Proceedings of the 2014 11th International Conference on Remote Engineering and Virtual Instrumentation (REV), Porto, Portugal, 26–28 February 2014; pp. 285–290. [Google Scholar] [CrossRef]
- Shoureshi, R. A course on microprocessor-based control systems. IEEE Control Syst. Mag. 1992, 12, 39–42. [Google Scholar] [CrossRef]
- Li, X.; Yu, H.; Zeng, P.; Zang, C.; Sun, L.; Yuan, M. A design method of optimal PI controller with saturation characteristic for second-order processes. In Proceedings of the 2015 IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER), Shenyang, China, 8–12 June 2015; pp. 1634–1639. [Google Scholar] [CrossRef]
- Zhou, L.; Ma, A.; Liu, L.; Zhu, N. The analysis of optimal sampling period on output multi-rate predictive control system. In Proceedings of the 2010 Chinese Control and Decision Conference, Xuzhou, China, 26–28 May 2010; pp. 1102–1105. [Google Scholar] [CrossRef]
- Huba, M.; Chamraz, S.; Bistak, P.; Vrancic, D. Making the PI and PID Controller Tuning Inspired by Ziegler and Nichols Precise and Reliable. Sensors 2021, 21, 6157. [Google Scholar] [CrossRef] [PubMed]
- Ho, T.-J.; Chang, C.-H. Robust Speed Tracking of Induction Motors: An Arduino-Implemented Intelligent Control Approach. Appl. Sci. 2018, 8, 159. [Google Scholar] [CrossRef] [Green Version]
- Meng, Z.; Zhang, L.; Li, H.; Zhou, R.; Bu, H.; Shan, Y.; Ma, X.; Ma, R. Design and Application of Liquid Fertilizer pH Regulation Controller Based on BP-PID-Smith Predictive Compensation Algorithm. Appl. Sci. 2022, 12, 6162. [Google Scholar] [CrossRef]
- Zarzycki, K.; Ławryńczuk, M. Fast Real-Time Model Predictive Control for a Ball-on-Plate Process. Sensors 2021, 21, 3959. [Google Scholar] [CrossRef] [PubMed]
- de Moura Oliveira, P.B.; Hedengren, J.D.; Solteiro Pires, E.J. Swarm-Based Design of Proportional Integral and Derivative Controllers Using a Compromise Cost Function: An Arduino Temperature Laboratory Case Study. Algorithms 2020, 13, 315. [Google Scholar] [CrossRef]
- Sozanski, K. Digital Signal Processing in Power Electronics Control Circuits, 2nd ed.; Springer: London, UK, 2017. [Google Scholar]
- Azeredo-Leme, C. Clock jitter effects on sampling: A tutorial. IEEE Circuits Syst. Mag. 2011, 3, 26–37. [Google Scholar] [CrossRef]
- Brannon, B. Sampled Systems and the Effects of Clock Phase Noise and Jitter; Application Note AN-756, Technical Report; Analog Devices, Inc.: Norwood, MA, USA, 2004. [Google Scholar]
- Brannon, B.; Barlow, A. Aperture Uncertainty and ADC System Performance; Application Note AN-501, Technical Report; Analog Devices, Inc.: Norwood, MA, USA, 2006. [Google Scholar]
- Redmayne, D.; Trelewicz, E.; Smith, A. Understanding the Effect of Clock Jitter on High Speed ADCs; Design Note 1013, Technical Report; Linear Technology, Inc.: Milpitas, CA, USA, 2006. [Google Scholar]
- Mota, M. Understanding Clock Jitter Effects on Data Converter Performance and How to Minimize Them; Technical Report; Synopsis Inc.: Mountain View, CA, USA, 2010. [Google Scholar]
- Noviello, C. Mastering STM32, 2nd ed.; Leanpub: Victoria, BC, Canada, 2022; Available online: https://leanpub.com/mastering-stm32-2nd (accessed on 18 July 2023).
- Ziegler, J.G.; Nichols, N.B. Optimum Settings for Automatic Controllers. Trans. ASME 1942, 64, 759–768. [Google Scholar] [CrossRef]
- O’Dwyer, A. Handbook of PI and PID Controller Tuning Rules, 3rd ed.; Imperial College Press: London, UK, 2009. [Google Scholar]
- Starr, K.D. Single Loop Control Methods; ABB: Zurich, Switzerland, 2015. [Google Scholar]
- Control Laboratory, RWTH Aachen University. Available online: https://www.irt.rwth-aachen.de/cms/IRT/Studium/Lehre-Bachelor/~jdce/Regelungstechnisches-Labor/?lidx=1 (accessed on 18 July 2023).
- Automatic Control, Lund University. Available online: https://www.control.lth.se/ (accessed on 18 July 2023).
- Control Tutorials, University of Michigan. Available online: https://ctms.engin.umich.edu/CTMS/index.php?aux=Home (accessed on 18 July 2023).
- Wilson, D. Teaching Your PI Controller to Behave; Texas Instruments: Dallas, TX, USA, 2015; Available online: https://e2e.ti.com/blogs_/b/industrial_strength/posts/teaching-your-pi-controller-to-behave-part-i (accessed on 18 July 2023).
- Mohammed, A.K.; Zoghby HM El Elmesalawy, M.M. Remote Controlled Laboratory Experiments for Engineering Education in the Post-COVID-19 Era: Concept and Example. In Proceedings of the 2020 2nd Novel Intelligent and Leading Emerging Sciences Conference (NILES), Giza, Egypt, 24–26 October 2020; pp. 629–634. [Google Scholar] [CrossRef]
- Uğur, M.; Savaş, K.; Erdal, H. An internet-based real-time remote automatic control laboratory for control education. Procedia Soc. Behav. Sci. 2010, 2, 5271–5275. [Google Scholar] [CrossRef] [Green Version]
- Rossiter, J.A.; Dormido, S.; Vlacic, L.; Jones, B.L.; Murray, R.M. Opportunities and good practice in control education: A survey. IFAC Proc. Vol. 2014, 47, 10568–10573. [Google Scholar] [CrossRef]
- Barber, R.; Horra, M.; Crespo, J. Control Practices using Simulink with Arduino as Low Cost Hardware. IFAC Proc. Vol. 2013, 46, 250–255. [Google Scholar] [CrossRef]
























Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sozański, K. Low Cost PID Controller for Student Digital Control Laboratory Based on Arduino or STM32 Modules. Electronics 2023, 12, 3235. https://doi.org/10.3390/electronics12153235
Sozański K. Low Cost PID Controller for Student Digital Control Laboratory Based on Arduino or STM32 Modules. Electronics. 2023; 12(15):3235. https://doi.org/10.3390/electronics12153235
Chicago/Turabian StyleSozański, Krzysztof. 2023. "Low Cost PID Controller for Student Digital Control Laboratory Based on Arduino or STM32 Modules" Electronics 12, no. 15: 3235. https://doi.org/10.3390/electronics12153235