3.1. Mathematical Model of the Battery
The choice as well as the dynamic model of the battery are very important for the performance and range of the EV. From different battery technologies, such as lead–acid, lithium-ion (Li-ion) nickel–cadmium (Ni-Cd) and nickel–metal hydride (NiMH), Li-ion is predominantly preferred due to its high energy density, low self discharge, long cycle life and high intrinsic safety [
27].
For mathematical modeling of the battery, there are different techniques, such as the electrochemical mechanism model, electro-thermal model, equivalent circuit model (ECM) and data-driven models, with their advantages and disadvantages [
28,
29]. In general, more complex models give accurate results at the cost of higher computational efforts and time-consuming and costly laboratory testing for parameter identification. For example, in the case of the equivalent circuit model, its accuracy can be increased with a high number of parallel RC groups [
30], but two RC groups has shown the trade-off between accuracy and complexity [
31]. In most of the cases, the parameter values are given for one cell [
32]. For modeling a battery pack of a specific rating, the scaling of the cell parameters is carried out based on the series and parallel connections of the battery cells [
33].
It is important to note that the modeling of a battery solely depends on the accurate estimation of the state of charge (SoC) of the battery [
32]. The SoC also determines the safe charging and discharging, optimal usage of battery and range prediction for an EV. Moreover, the battery model parameters are nonlinear in terms of the SoC, temperature, current rate, aging of the battery, self-discharge, hysteresis, etc. To bypass the complicated optimization techniques and sophisticated algorithm for SoC estimation [
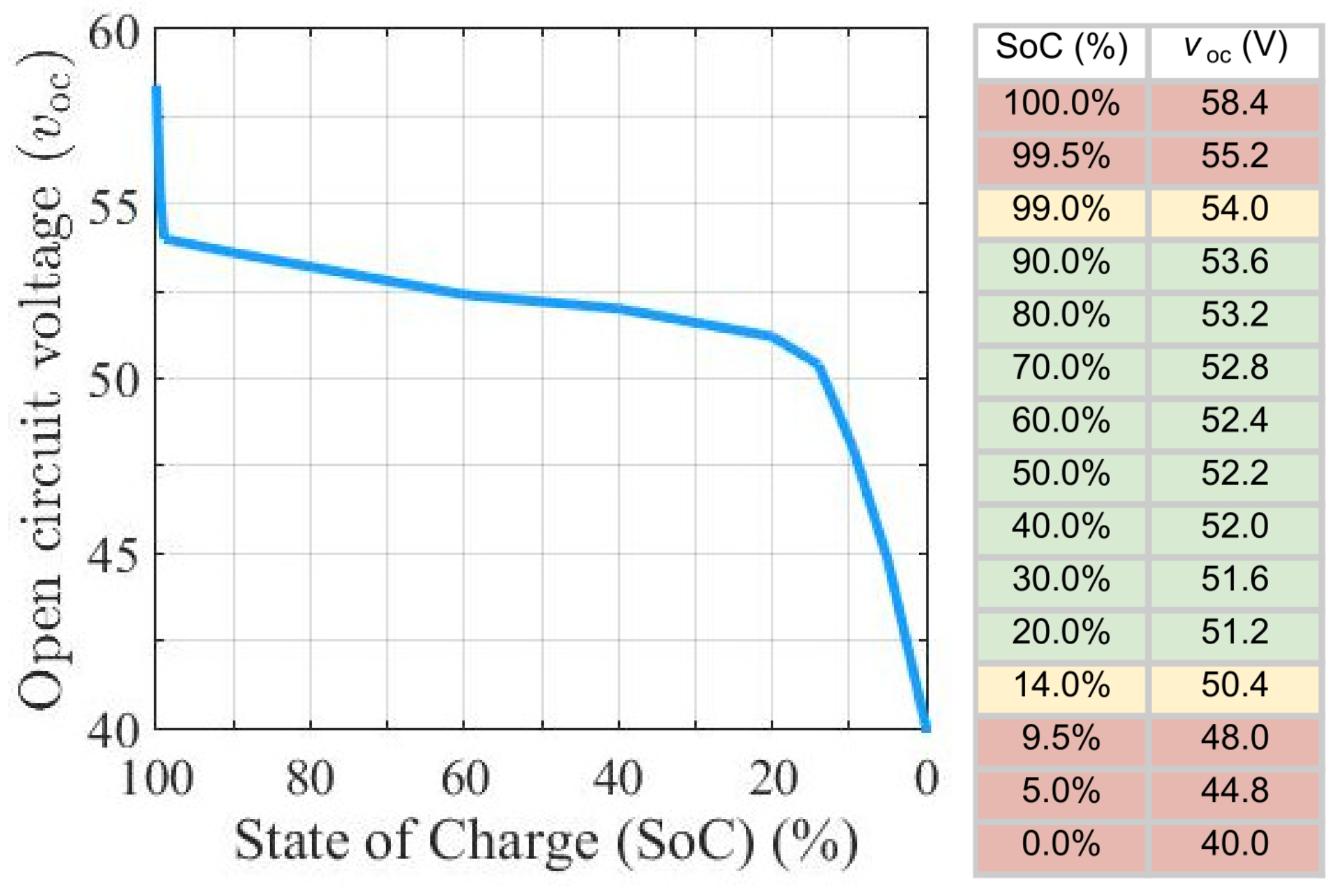
34], one can use the discharge curve from the manufacturer’s datasheet. A typical discharge curve relates the change in battery capacity (
Q) to the open circuit voltage (
). Only three points on the manufacturer’s discharge curve in a steady state are required to extract parameters from an equation-based battery discharge/charge model [
35]. To further simplify the process, one can construct the SoC versus open-circuit voltage (
) curve directly using limited points from the look-up table of the manufacturer’s datasheet, which is the outcome of the experimental data [
28].
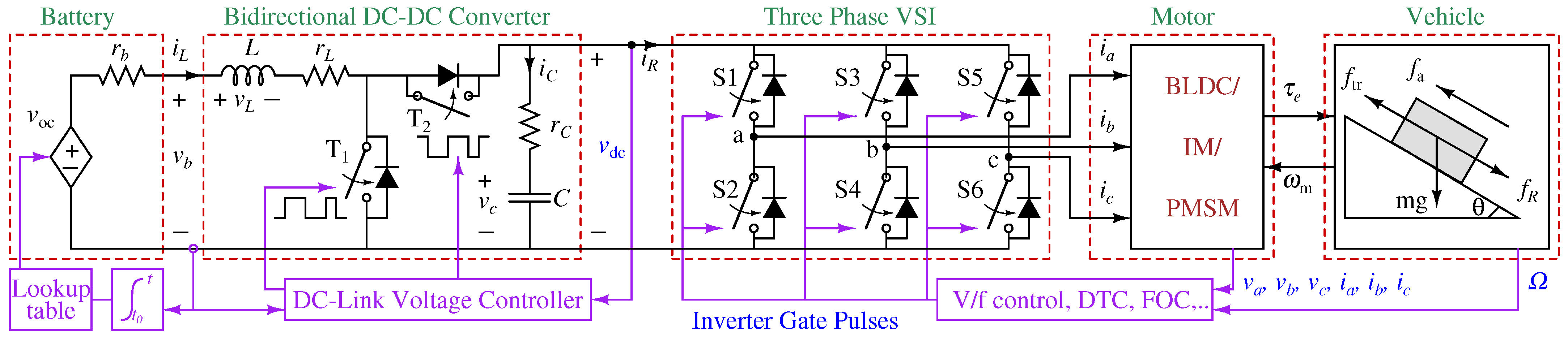
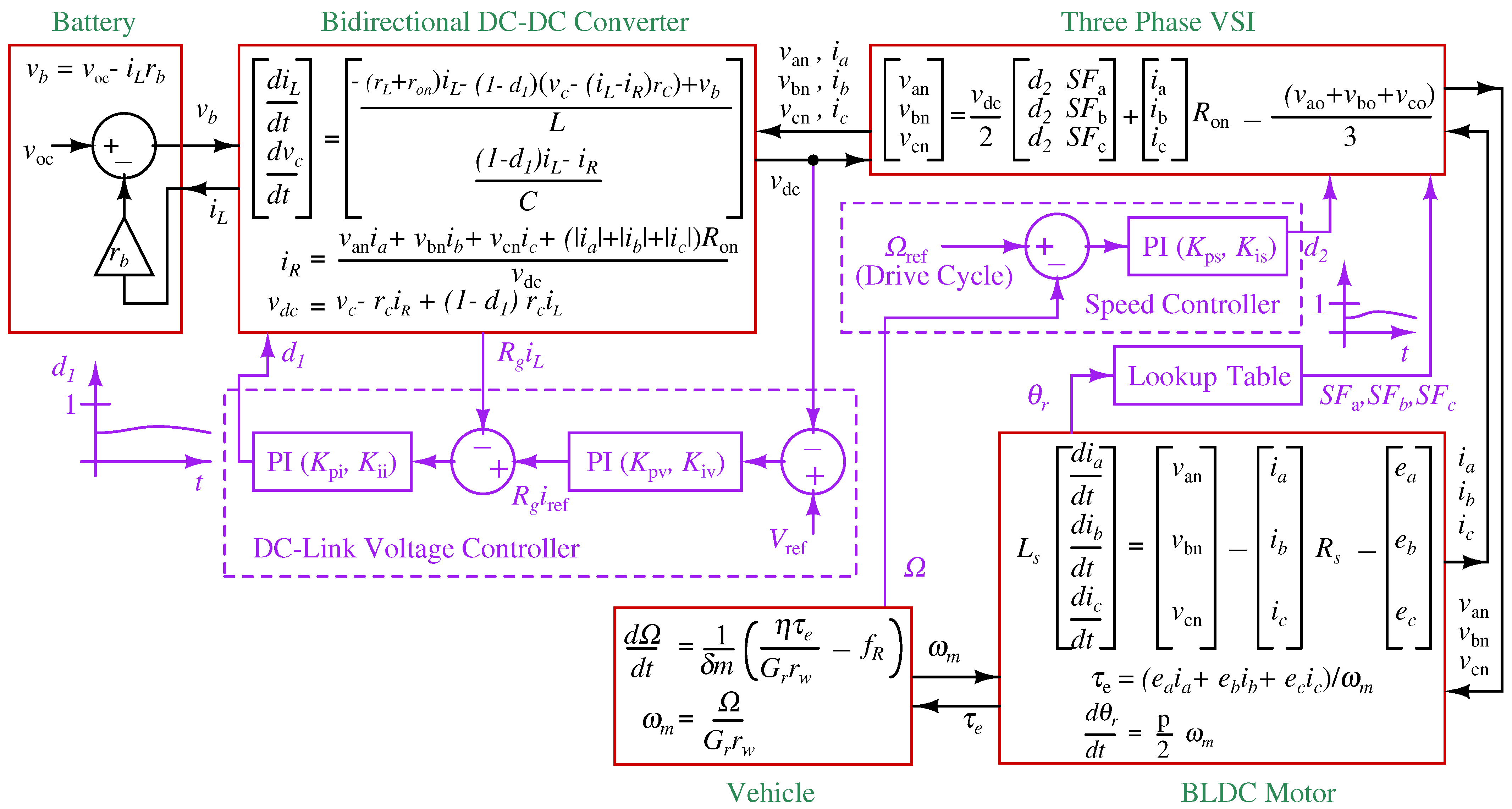
In this paper, the battery model is obtained while considering the SoC-dependent open-circuit voltage with the series internal resistance, as shown in the battery subsystem in
Figure 2. The SoC is calculated using the Coulomb counting method by integration of the measured current. Then, the open-circuit voltage is determined from the predefined look-up table. Due to the flat nature of the discharge curve (
Figure 3), the two successive points are connected using a straight-line equation.
The equations of the battery are as follows:
where the battery open circuit voltage (
), internal resistance (
), nominal or rated battery capacity (
), battery efficiency (
) and initial battery state of charge (
) are the specified parameters of the battery. As the Coulomb counting method gives the relative change in SoC and not an absolute value, the
is calculated by fully charging the battery pack to a known voltage, which is available from the manufacturer’s datasheet. But the current (
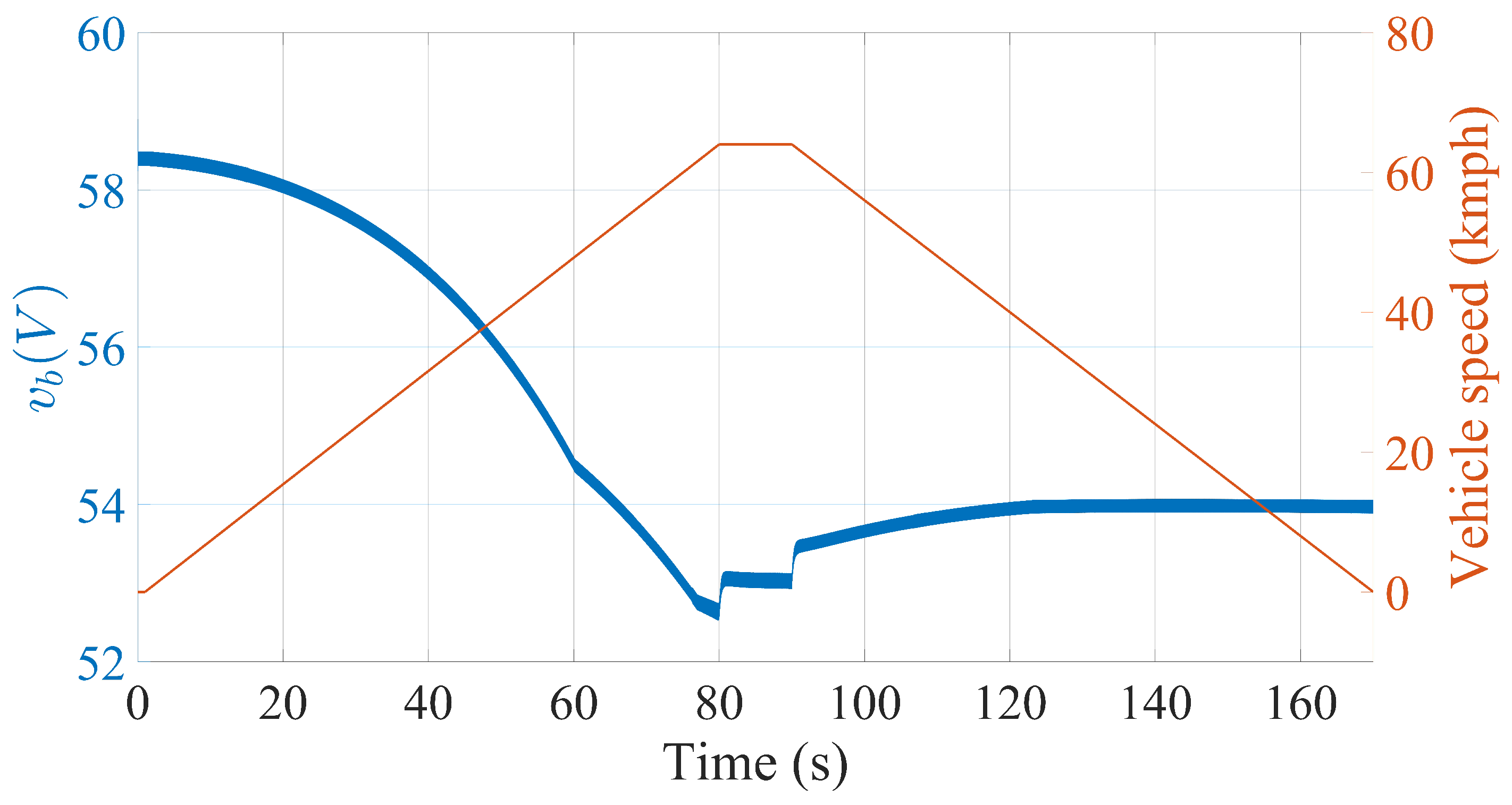
) is calculated from the bidirectional boost–buck DC-DC converter. The battery terminal voltage (
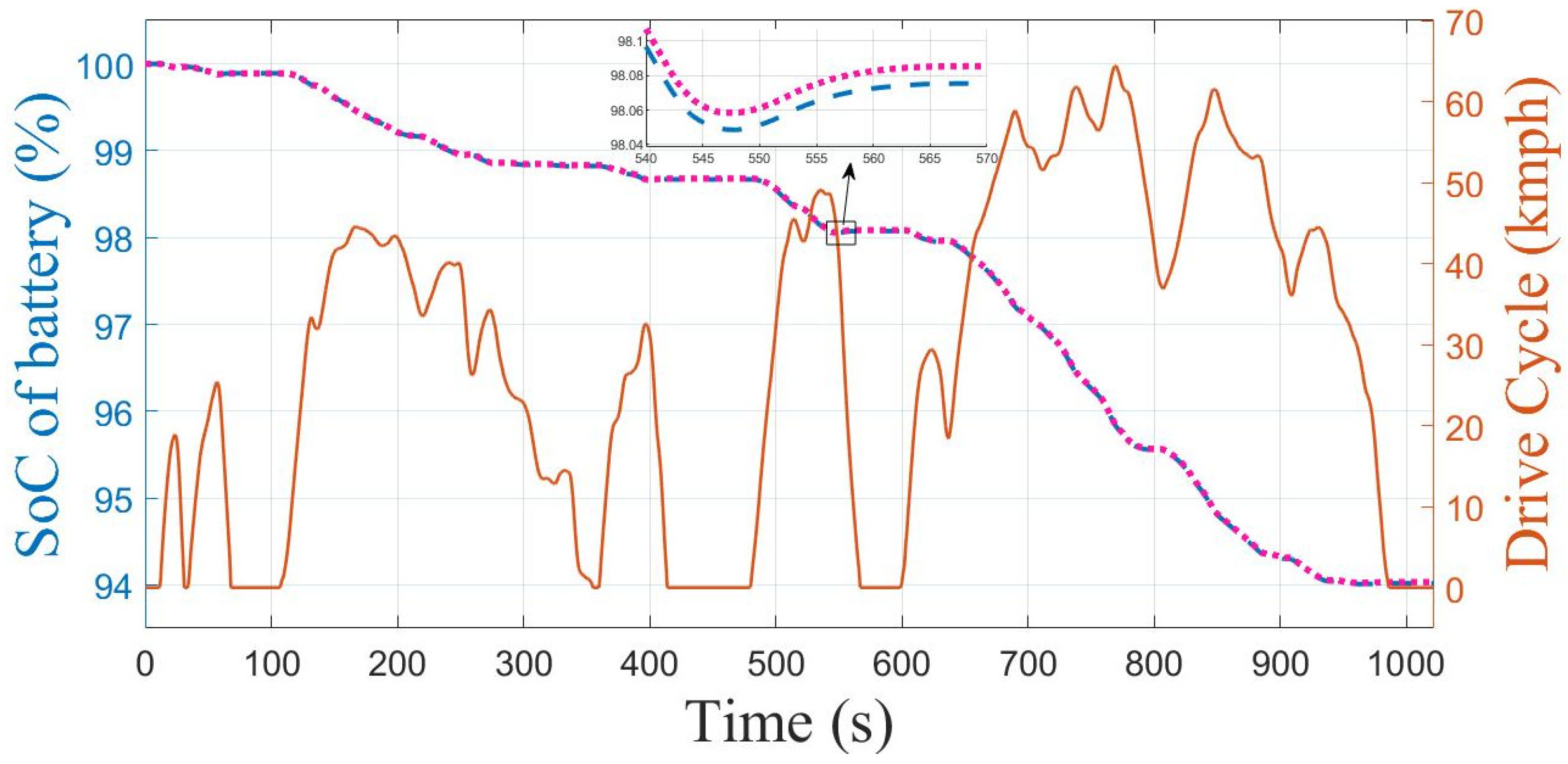
), power loss (
), energy transferred (
) and state of charge of the battery (
) are calculated over the selected drive cycle to obtain the range of the EV in a single charge.
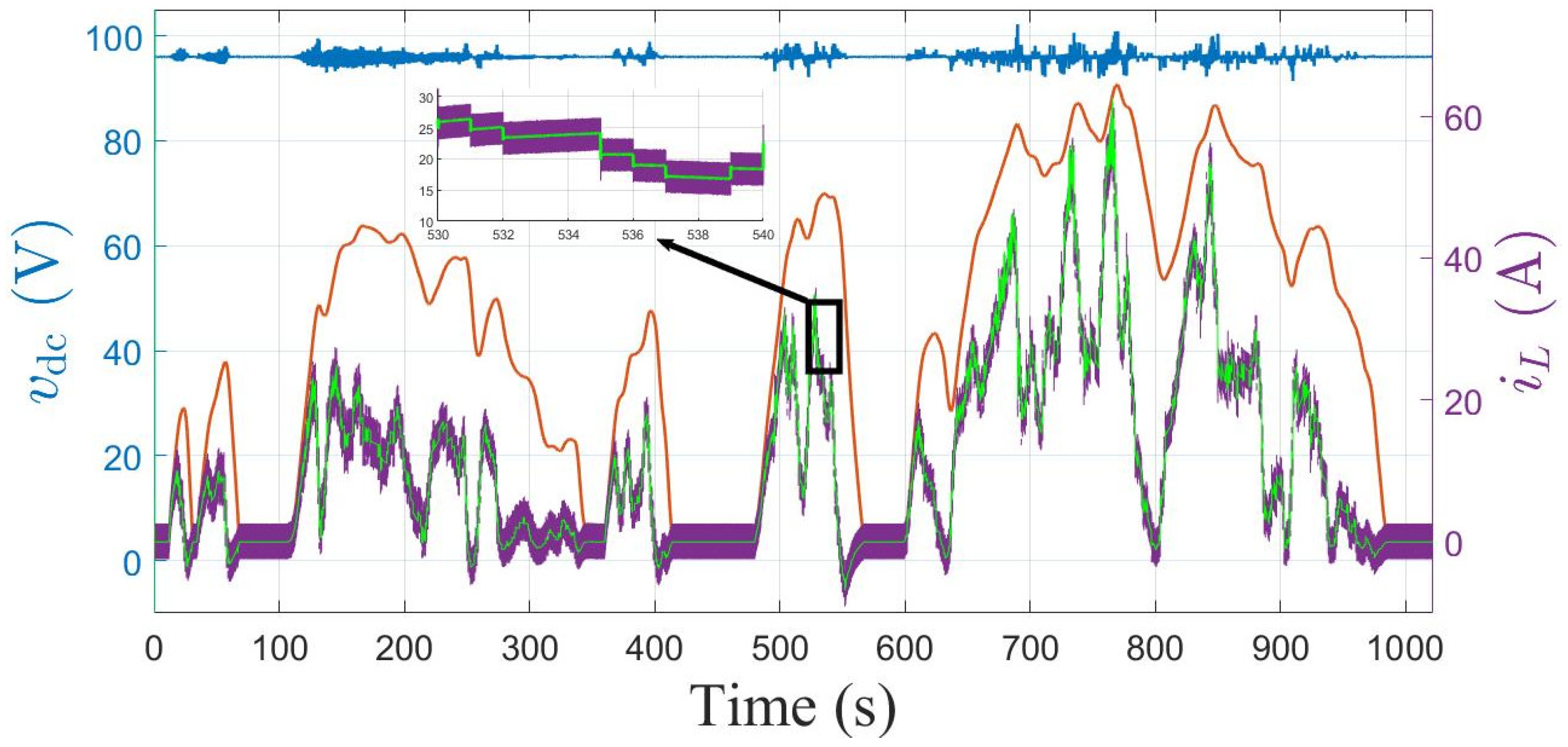
3.2. Mathematical Model of the Bidirectional DC-DC Converter and DC-Link Voltage Controller
The battery is connected to the DC-link through a bidirectional DC-DC converter. As per the mode of operations, the converter switches (
and
in
Figure 2) are turned on alternately to control the current flow bidirectionally by maintaining the DC-link voltage. The inductor current (
) and capacitor voltage (
) are calculated as follows [
37]:
where
L,
,
C and
are the inductance, series resistance of the inductor, capacitance and its equivalent series resistance (ESR), respectively,
F is the switching signal given to
based on the feedback control law given in Equation (
8),
is the complimentary signal for
and
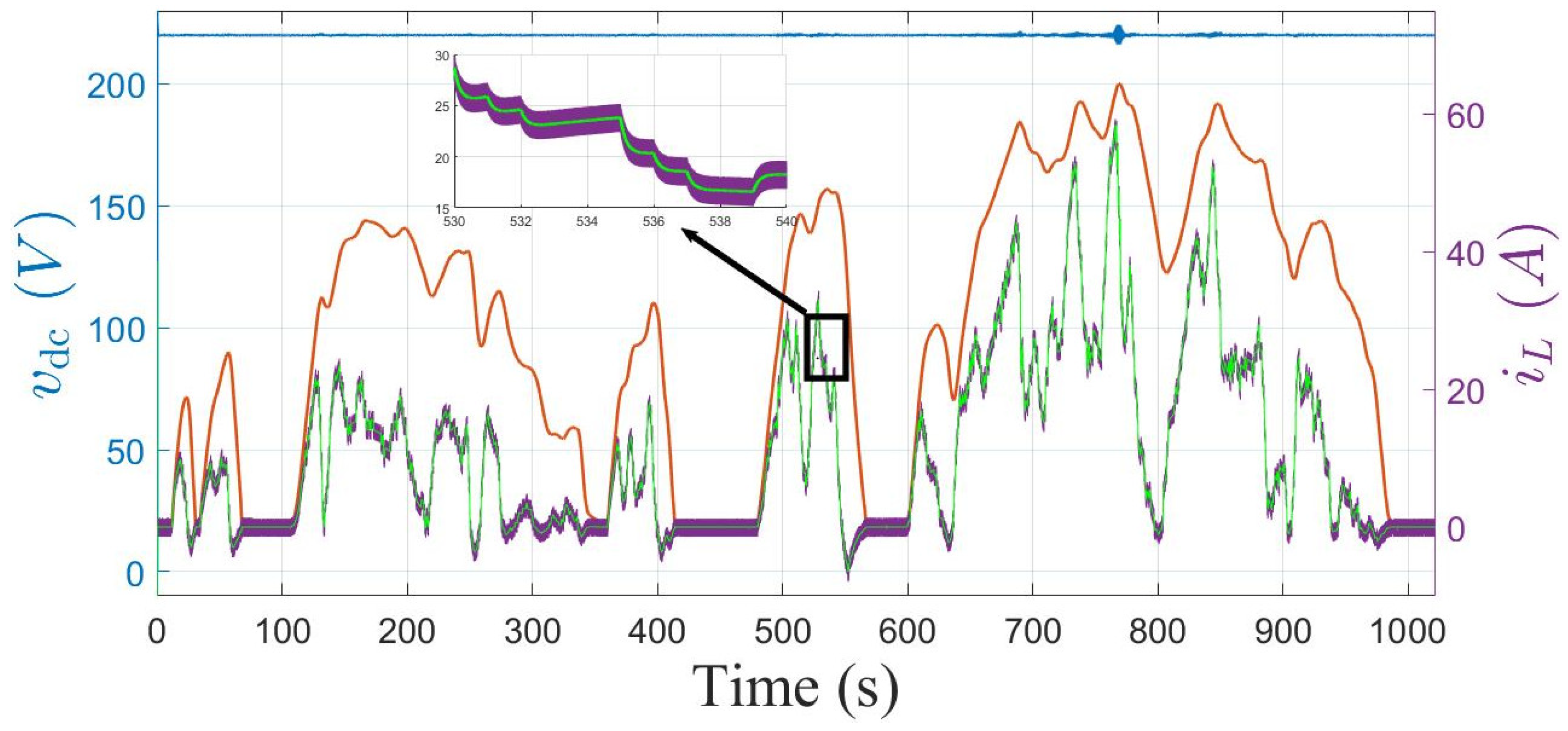
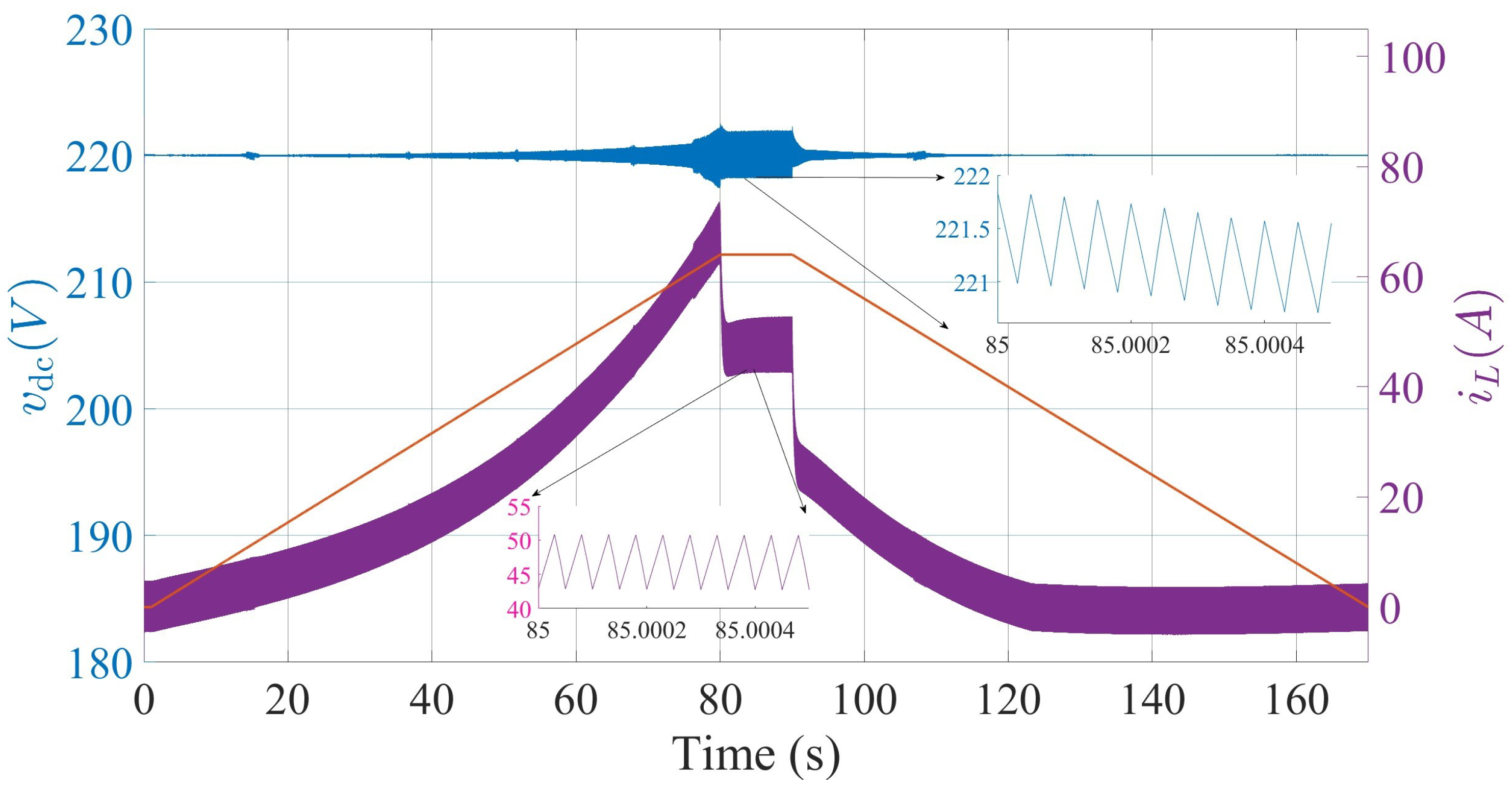
is the input current of the three-phase VSI. Then, the DC-link voltage (
) is calculated, and this is connected to the three-phase VSI (
Figure 2). The same equations are solved for motoring (boost mode) as well as regenerative braking (buck mode). The motoring or regenerative braking operation is decided by the sign of
, which is the load current of the bidirectional DC-DC converter, as shown in
Figure 2.
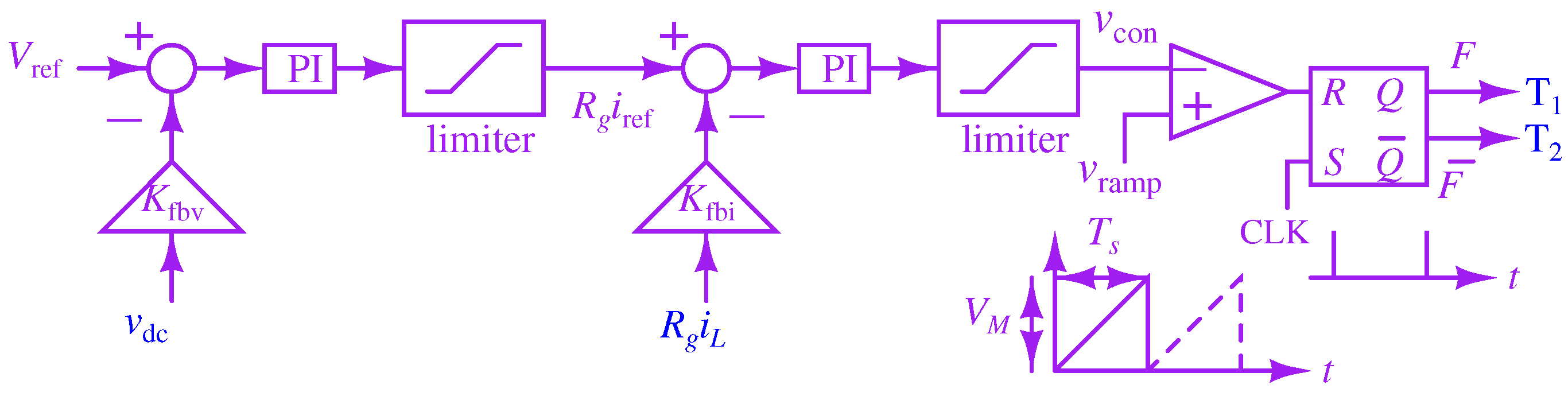
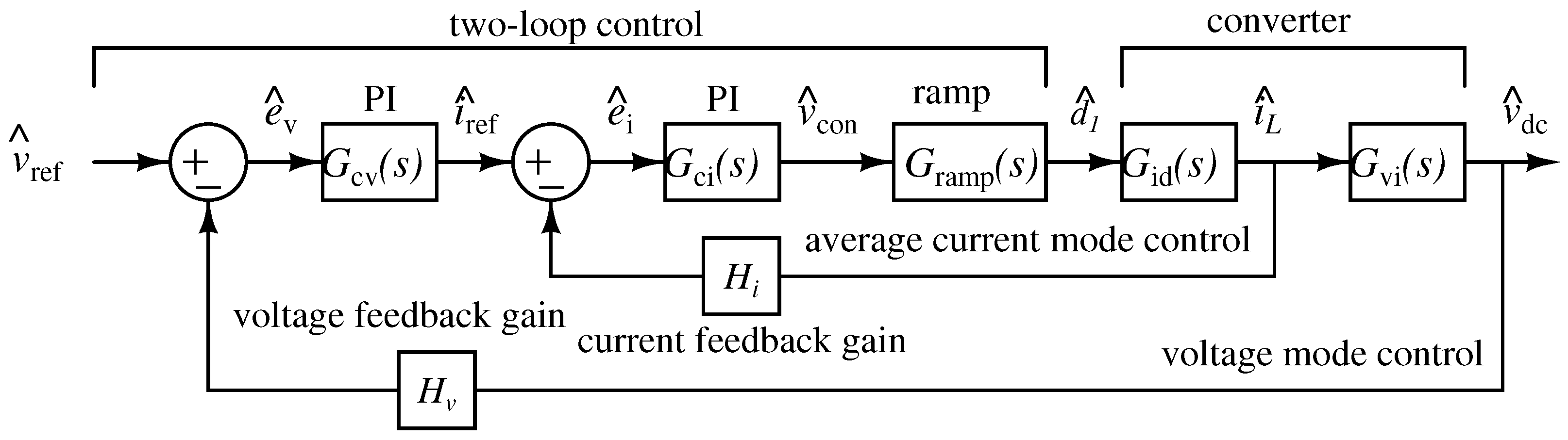
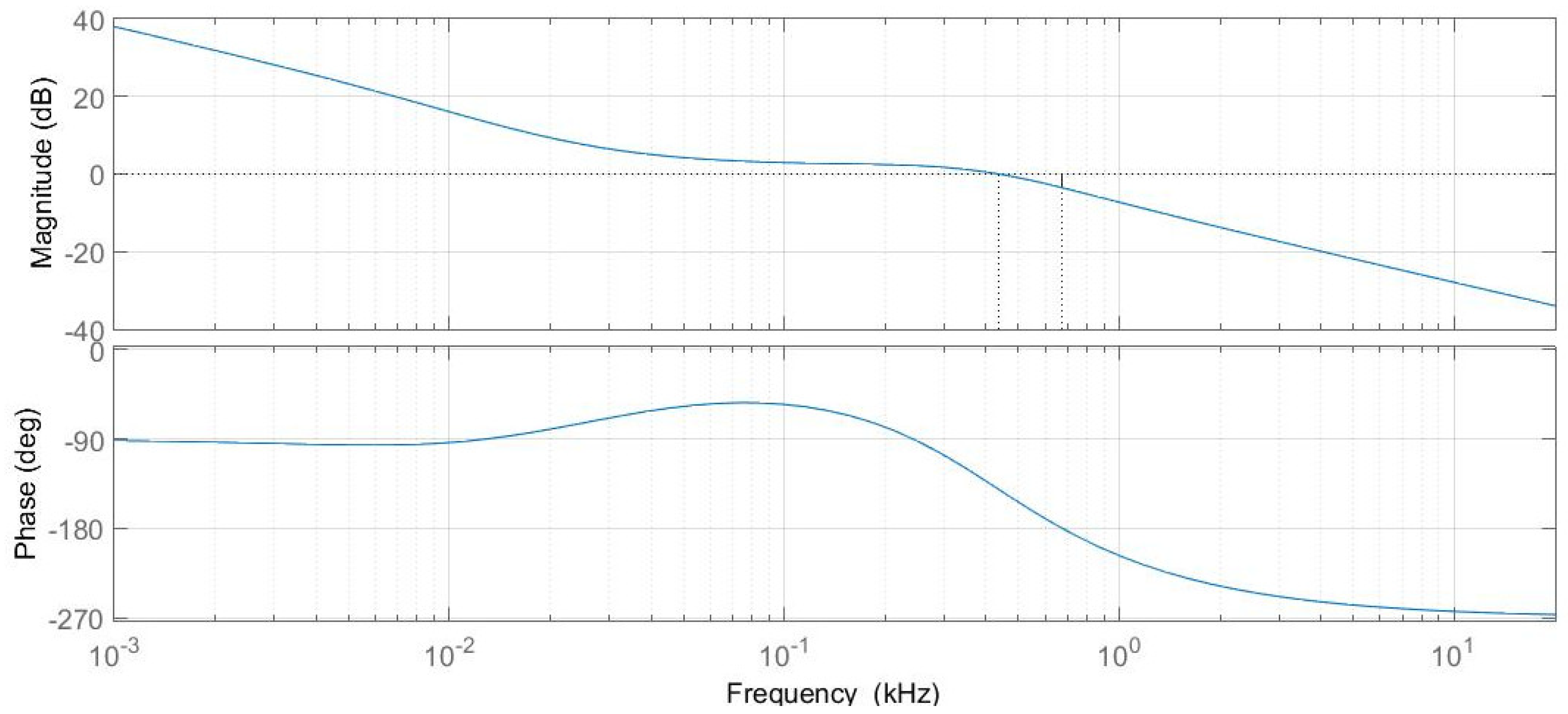
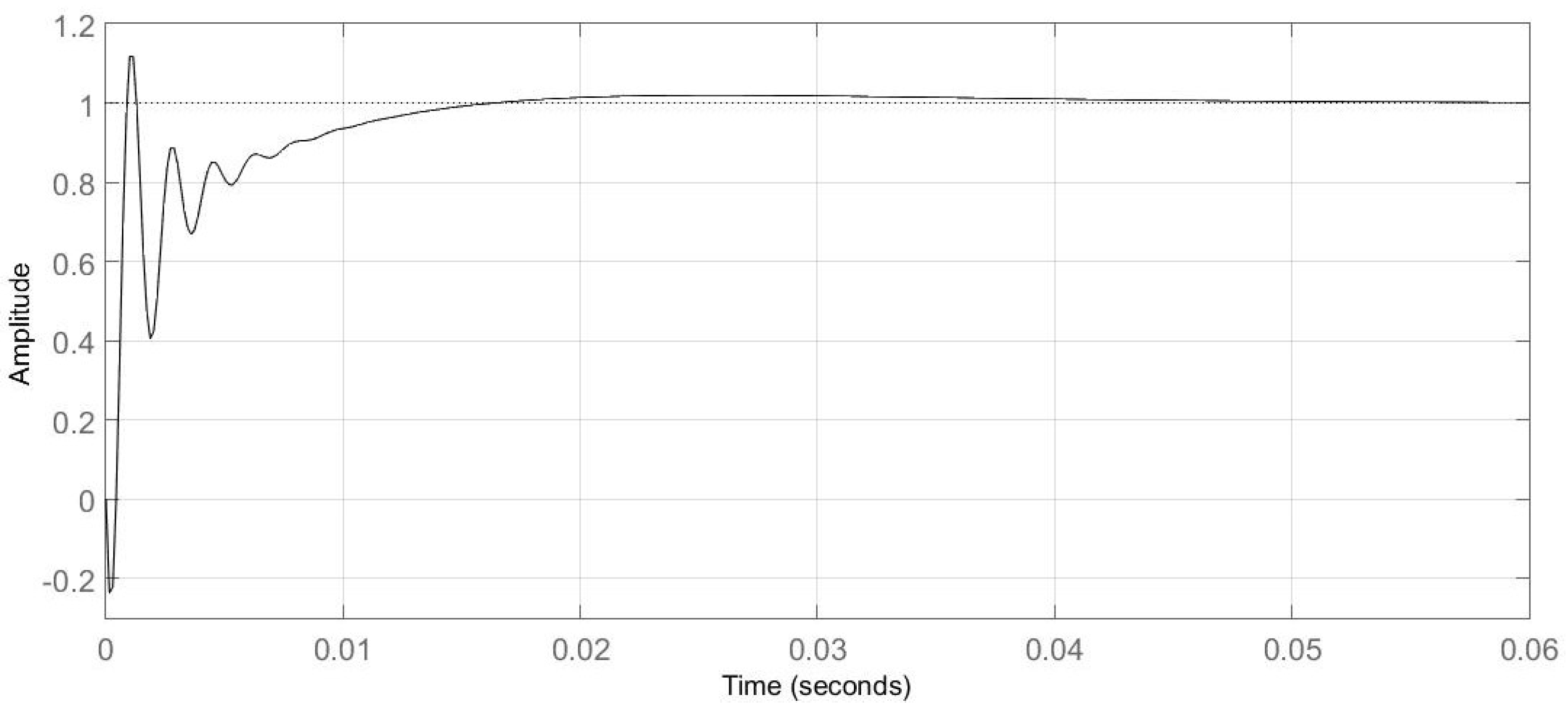
A two-loop control is used to regulate the DC-link voltage as shown in
Figure 4. In comparison with the outer voltage loop, the inner current loop has faster dynamics as it considers the faster change in the inductor current dynamics. In the outer voltage control loop, the sensed DC-link voltage is subtracted from the reference voltage (
) and passed through a PI compensator to generate the current reference (
) for the inner loop. Then, the sensed inductor current signal (
) is subtracted from the current reference, where
is the sensor gain. The difference is sent through a PI compensator to generate the control voltage (
). Two PI controllers are designed using a small-signal model, which is given in
Section 4. The reference signal and control voltage are as follows:
where
,
,
and
are the compensator gains and
and
are the feedback gains. The switch
is periodically turned
on at the start of each switching cycle as the clock signal (CLK) is applied to the set pin of the flip-flop. Then, the control voltage is compared with a unipolar sawtooth carrier signal (
) to reset the flip-flop. The flip-flop is used to avoid multiple switching instances within a clock period. In this process, the switching pulses
F and
are generated for
and
. The control logic is given by
where
,
is the amplitude and
denotes the switching period.
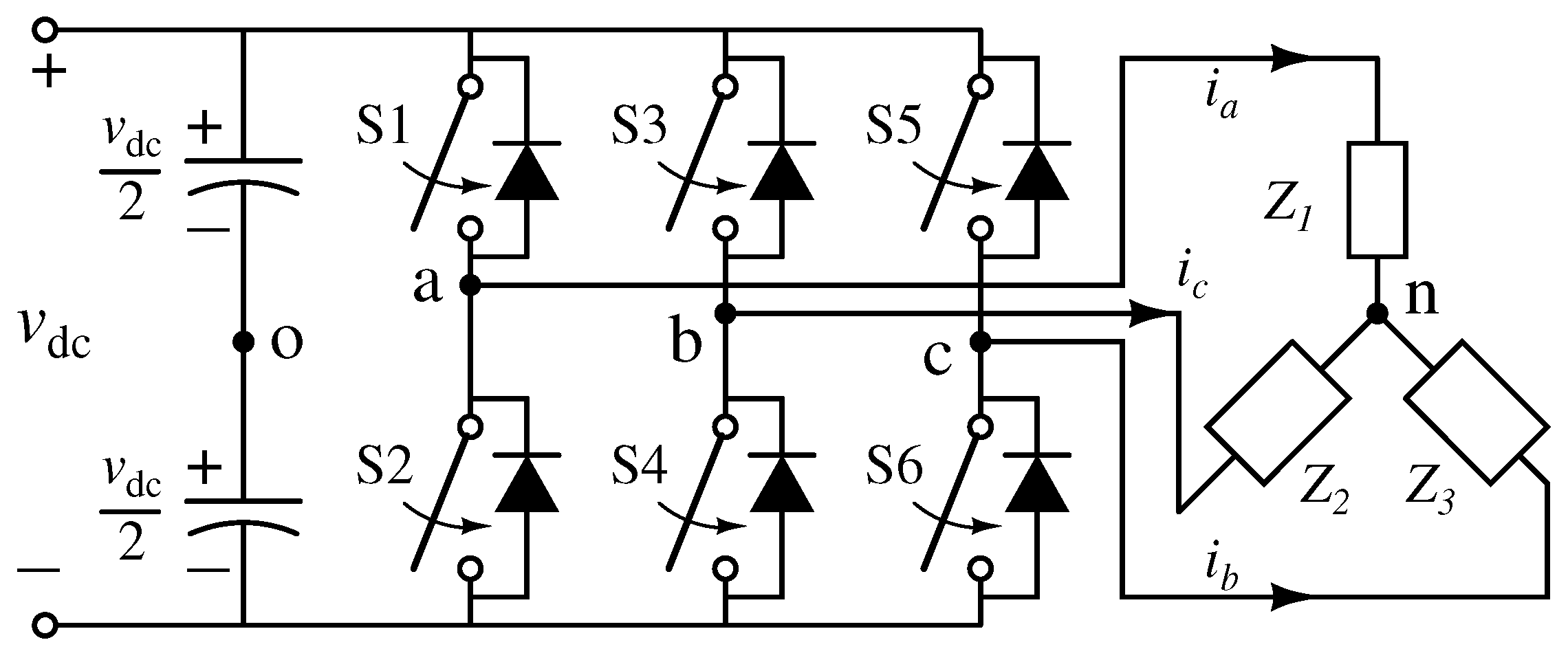
3.3. Mathematical Model of the Three-Phase VSI
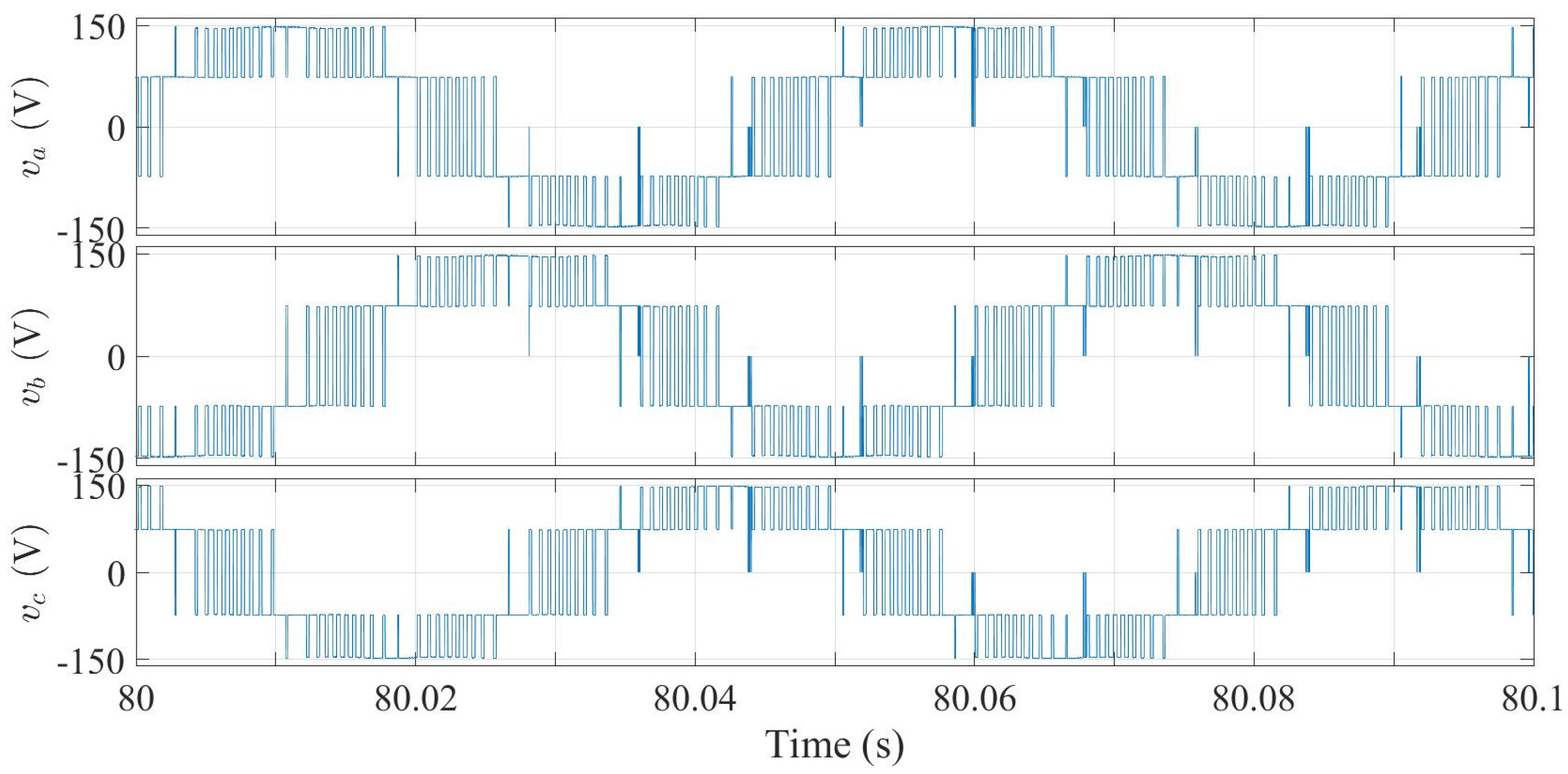
By considering the voltage drop across the switch but with zero leakage current and zero for the rise and fall times of the waveforms of the switches, the inverter is simplified. As shown in
Figure 5, the relation between the input DC-link voltage (
) and output three phase voltages (
) is established using six switching signals. These six signals can simply be used as the three switching functions for three legs of the inverter [
38]. The switching functions can be represented in terms of the gate pulses (
,
,
,
,
,
) of six switches (
):
When the two switches in a leg are
off, then the switching functions are zero. In a leg, both switches cannot be turned
on simultaneously. Therefore, based on the switching combinations, the switching functions are
The generated voltage in every phase considering voltage drop due to the resistance when turned
on (
= 28 m
) for the switch can be written as
where
,
,
and
can be obtained as follows:
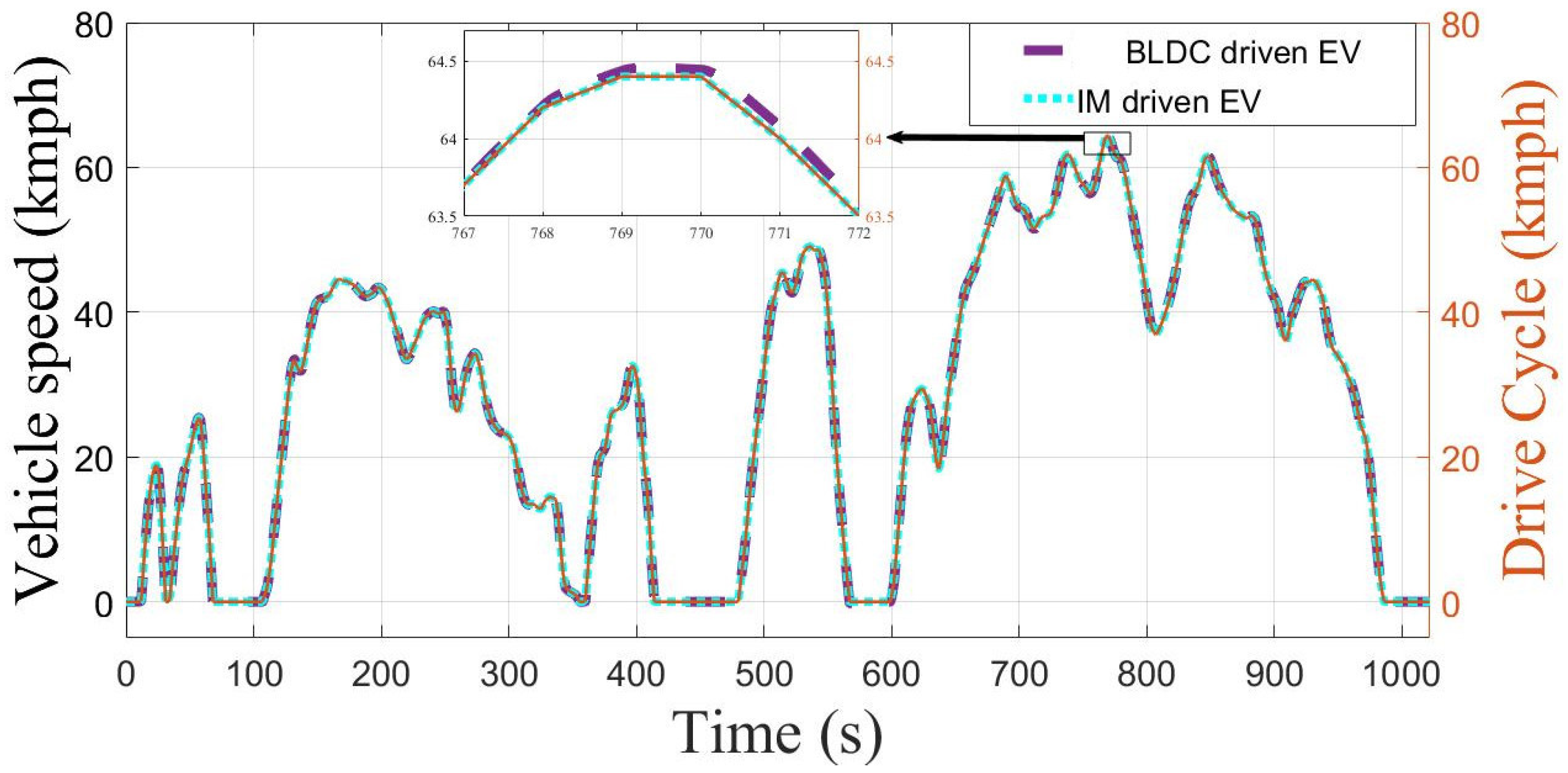
3.5. Mathematical Model of the Vehicle Dynamics
As shown in the vehicle subsystem of
Figure 2, the accelerating force (
) of a vehicle depends on the force exerted on the wheel (
) overcoming all the resistive forces (
) (rolling resistance force (
), aerodynamic drag force (
) and hill climbing force (
)) acting on a vehicle. By neglecting the aerodynamic lift and wind velocity, it can be derived from Newton’s second law of motion as follows:
where the rolling resistance coefficient (
), climbing slope (
), drag coefficient (
), air density (
), vehicle frontal area (
), vehicle velocity (
), gross (curb plus passenger plus cargo) vehicle weight (
m) and rotational inertia factor (
) are used for calculation of the resistive forces acting on an EV running on a road. The rolling resistance force
is primarily due to the friction of the vehicle’s tires while rotating on the road. The aerodynamic drag force (
) is due to the friction of the vehicle body moving through the air. The hill climbing force (
) is required to drive the vehicle up a slope, and it is the component of the vehicle’s weight that acts along the slope. Note that
is negative if the vehicle speed is slowing down (i.e., decelerating) and
will be negative if it is going downhill. In this study, the slope (
) of the road is considered to be zero.
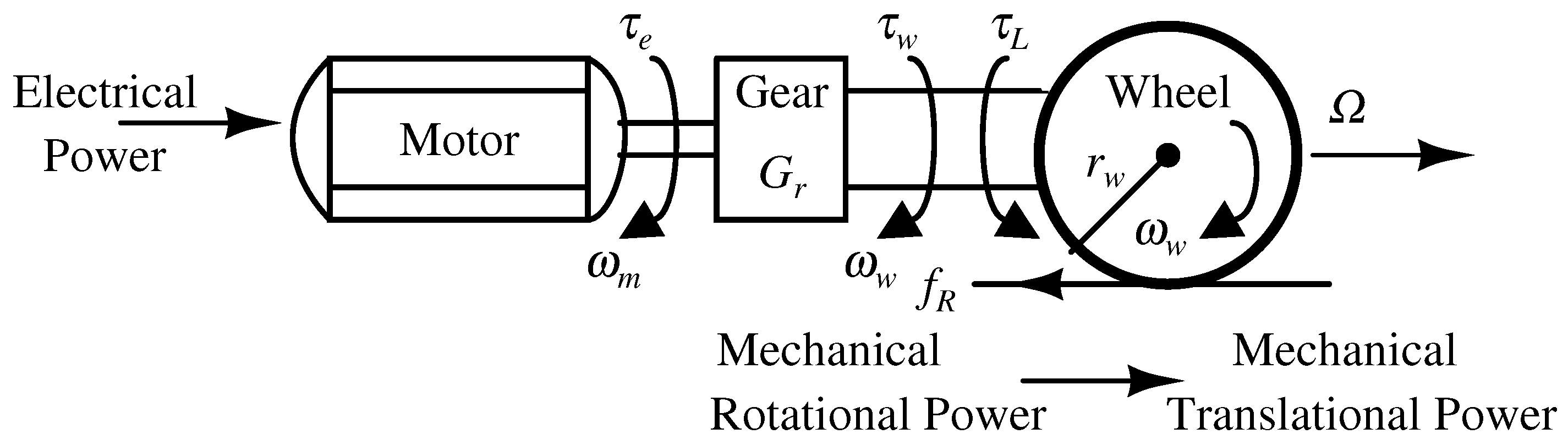
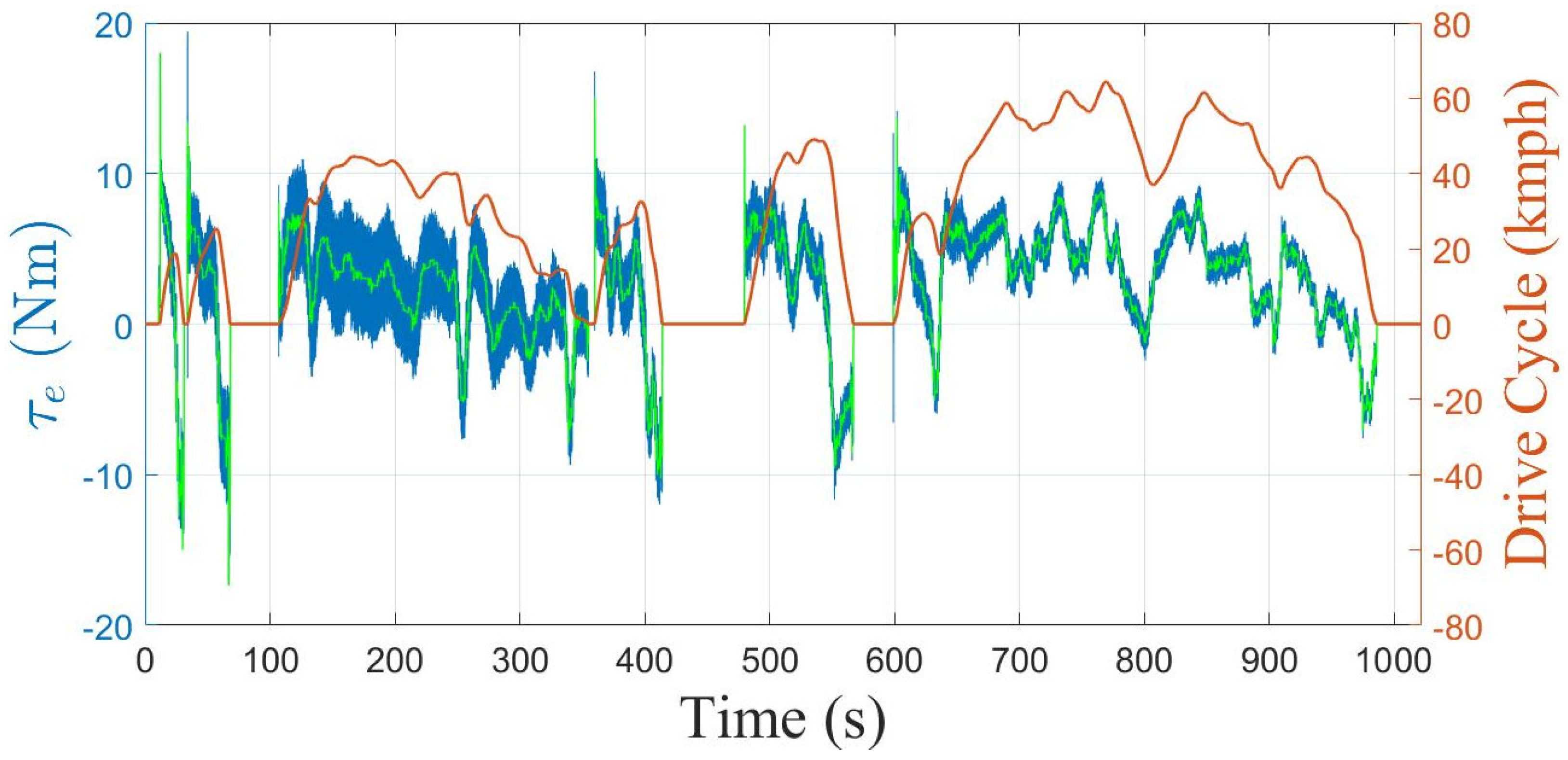
As the motor is coupled with the vehicle body, the mathematical model can be derived by using the coupled system altogether. The motor transforms the electrical power to mechanical power in the motor shaft, which is connected to the wheel of the vehicle through a transmission system consisting of a gear box, as shown in
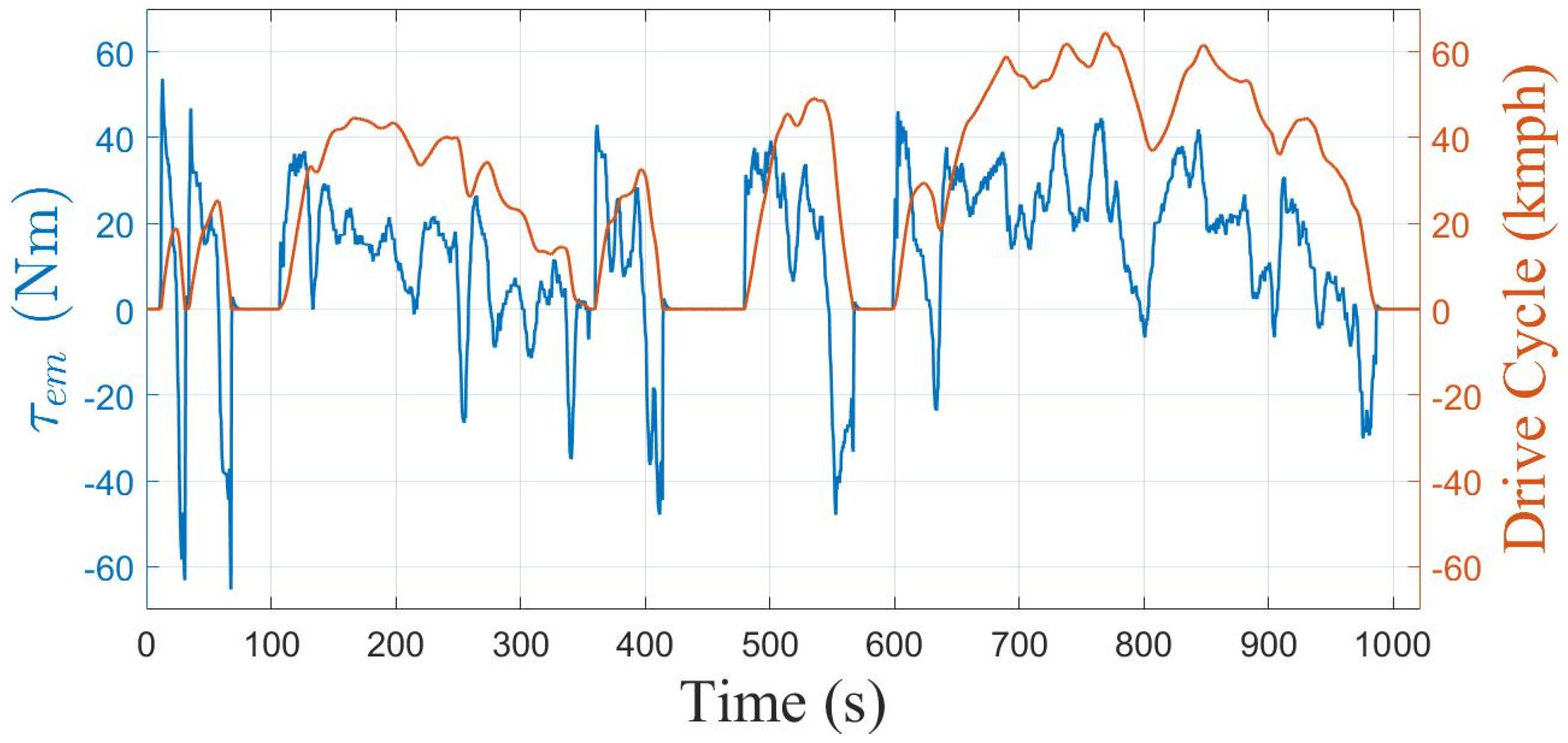
Figure 10. Using the developed electromagnetic torque from the motor (
for BLDC and
for IM), the wheel torque as well as the force exerted on the wheel are calculated. The wheel torque is responsible for generation of the tractive force
. By considering the transmission efficiency (
), the radius of wheel (
) and the gear ratio (
), the tractive torque or wheel torque (
) and the tractive force (
) supplied to the wheel are calculated as follows:
The gear ratio can be described as a torque multiplier or speed reducer. Therefore, the rotational speed of the motor and rotational speed of the wheel of the vehicle are related by
. By neglecting the slipping of the running wheel, now the rotational speed of the wheel (
) is transformed into the translational speed of the vehicle (
), and the acceleration force (
) can be calculated as follows:
It is worth noting that the transmission efficiency
is not used for the speed conversion calculation. Moreover, the acceleration force (
) combines both the linear and rotational acceleration forces. In this context, the calculation of the rotational inertia factor (
) or mass factor is highly important. It requires the knowledge of the mass and distribution of the mass, form, position and dimensions of each rotating component within the vehicle, mainly the wheel and the rotor drive line of the motor. This is represented by [
50]
where
and
denote the total rotational inertia of the wheels and rotor drive line, respectively. As the vehicle could be all wheel drive, front wheel drive or rear wheel drive, the rotational inertia of the wheels and rotor drive line have almost the same values in motoring mode. But in the case of regenerating braking mode, it varies with the type of the drive [
51]. In this study, a constant regeneration factor is used to simplify the analysis. Moreover, the rotational inertia is different for different vehicle types, depending on the number of wheels, coupling arrangements and gear ratio. If these values are not known, then the mass factor can be estimated using the following empirical relation [
50]:
Therefore, the equivalent mass (
) is a function of the vehicle mass (
m) and gear ratio (
). In this study, the effect of all the rotational inertia of the rotating components is considered by increasing the mass of the vehicle (
m) by 1.05 times [
50,
52]. As shown in
Figure 10, the load torque (
) at the wheels is the sum of the resistive toque (
) and the torque due to acceleration force (i.e., (
)).
The tractive force (
) delivered to the wheel to move the vehicle can also be established from the torque equation calculated at the wheels by considering the equivalent rotational inertia (
) as follows [
53]:
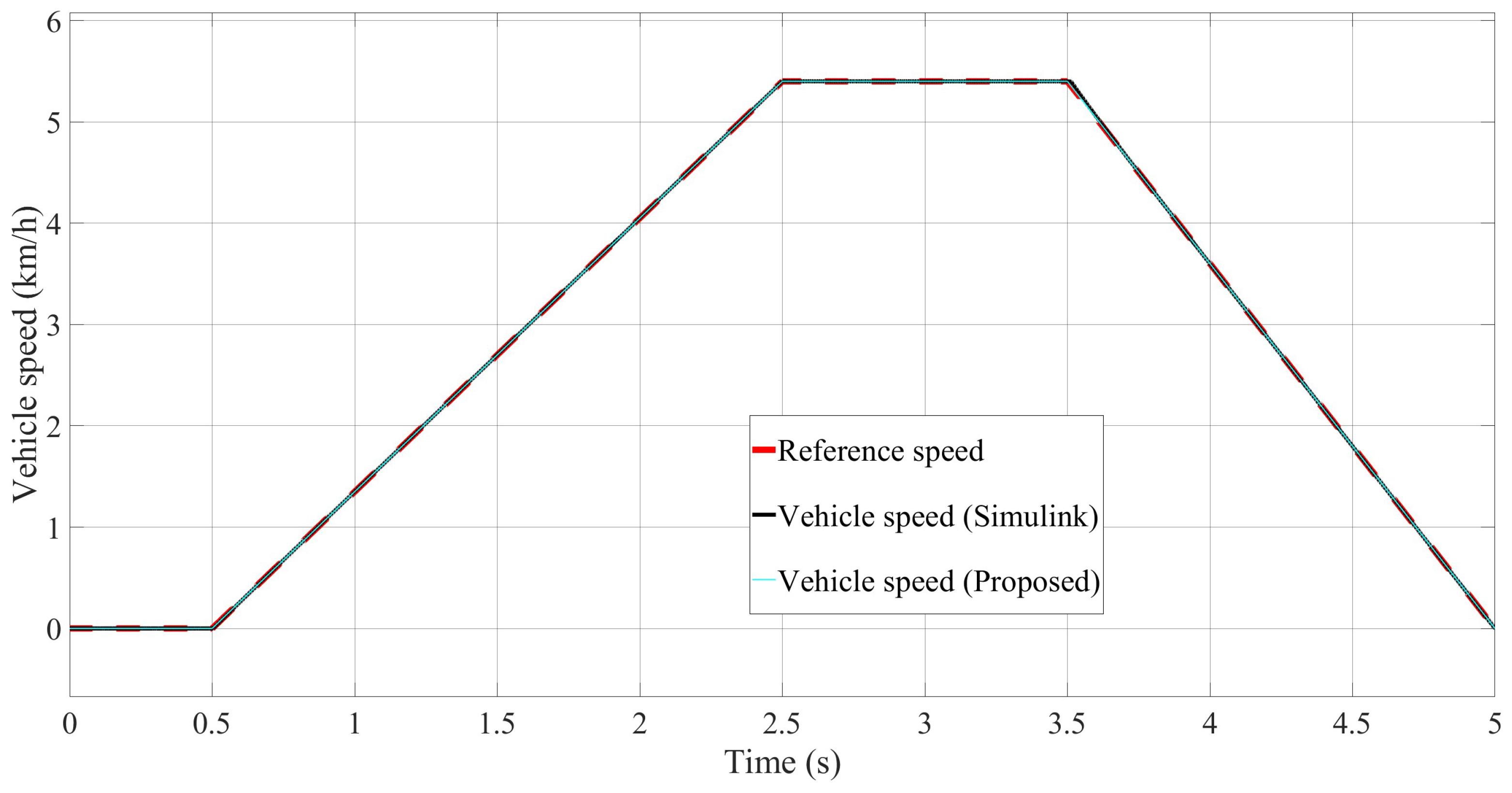
Therefore, a first-order differential equation is used to calculate the vehicle speed from the motor’s electromagnetic torque according to Equation (
36).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

























