
Search-Coil Based Stator Interturn Fault Detection in Permanent Magnet Machines Running under Dynamic Condition

Abstract
:1. Introduction
- (1)
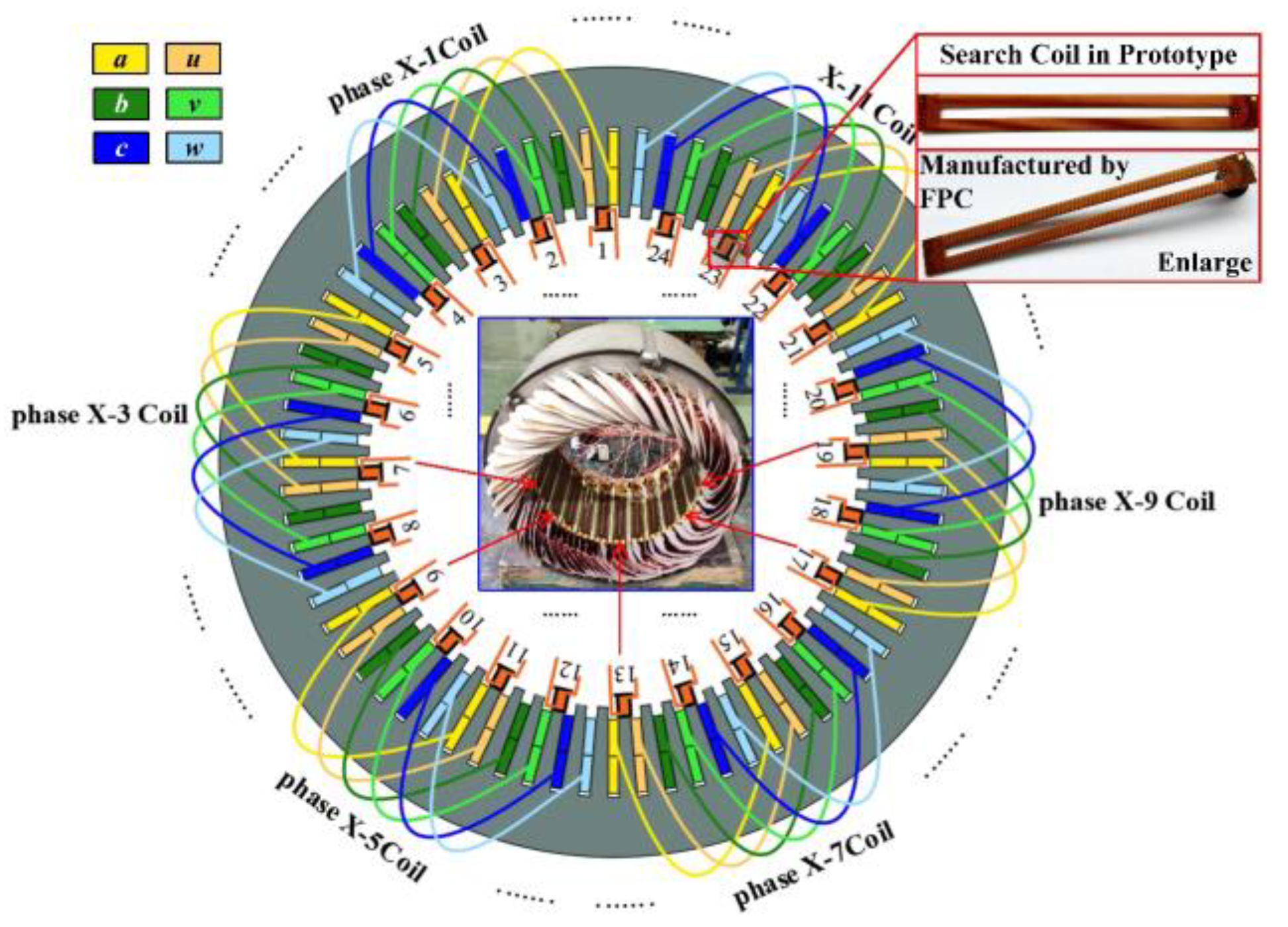
- Flexible PCB is used to make search coils, and the number of turns can be increased if the full rate of the slot is certain, and increased mutual inductance makes it easier to detect fault signals.
- (2)
- A demodulation algorithm based on the Digital Lock-In Amplifier (DLIA) is proposed, which can be used under non-stationary conditions.
- (3)
- The voltage at the characteristic frequency of the search coil is standardized and its variance is considered as the fault characteristic quantity, which can make robust detection of motor speed.
2. Principle of Proposed Method
2.1. Back EMF in Search Coils
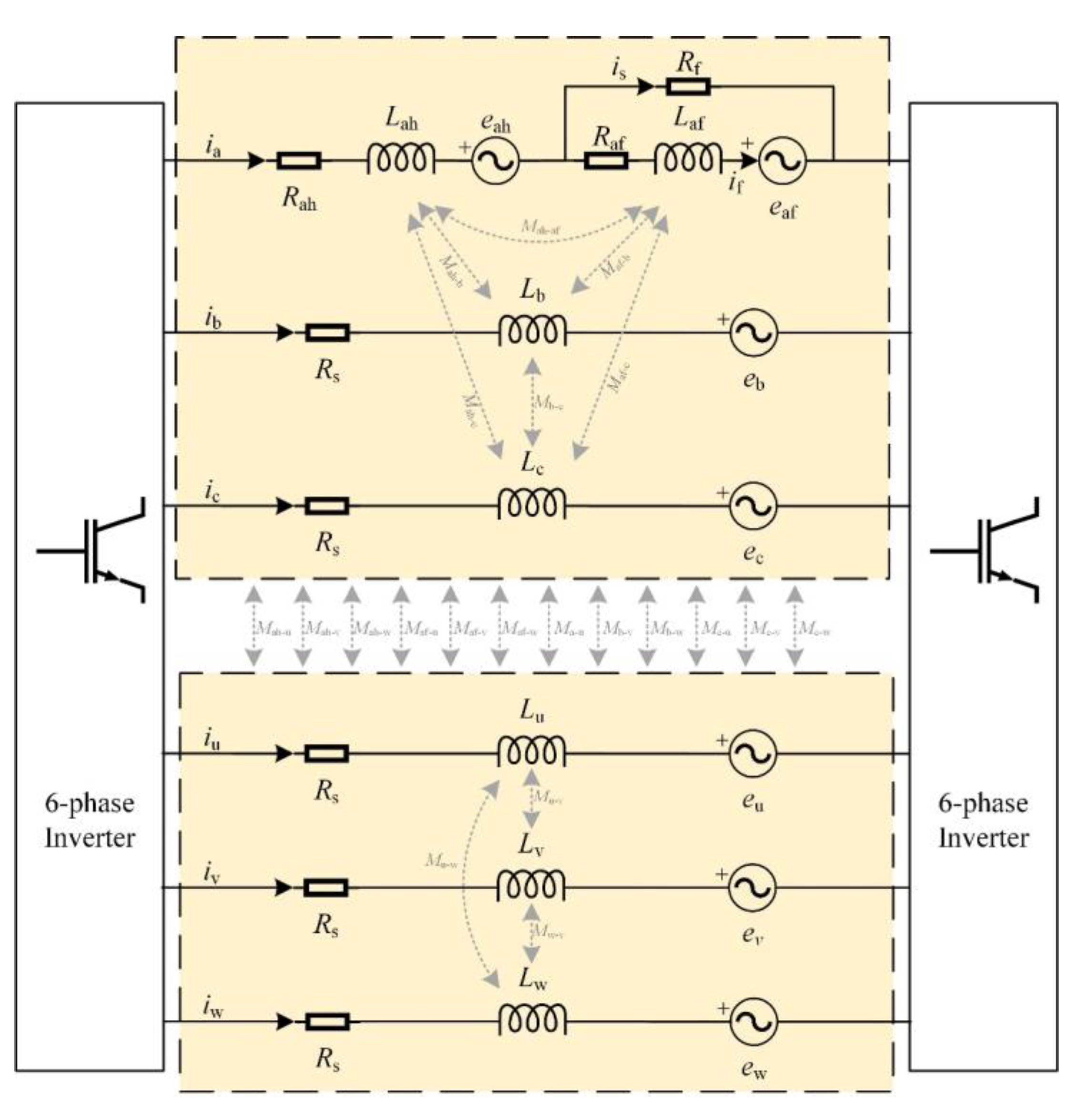
2.2. Six-Phase Equivalent Circuit Model with ITSC Fault
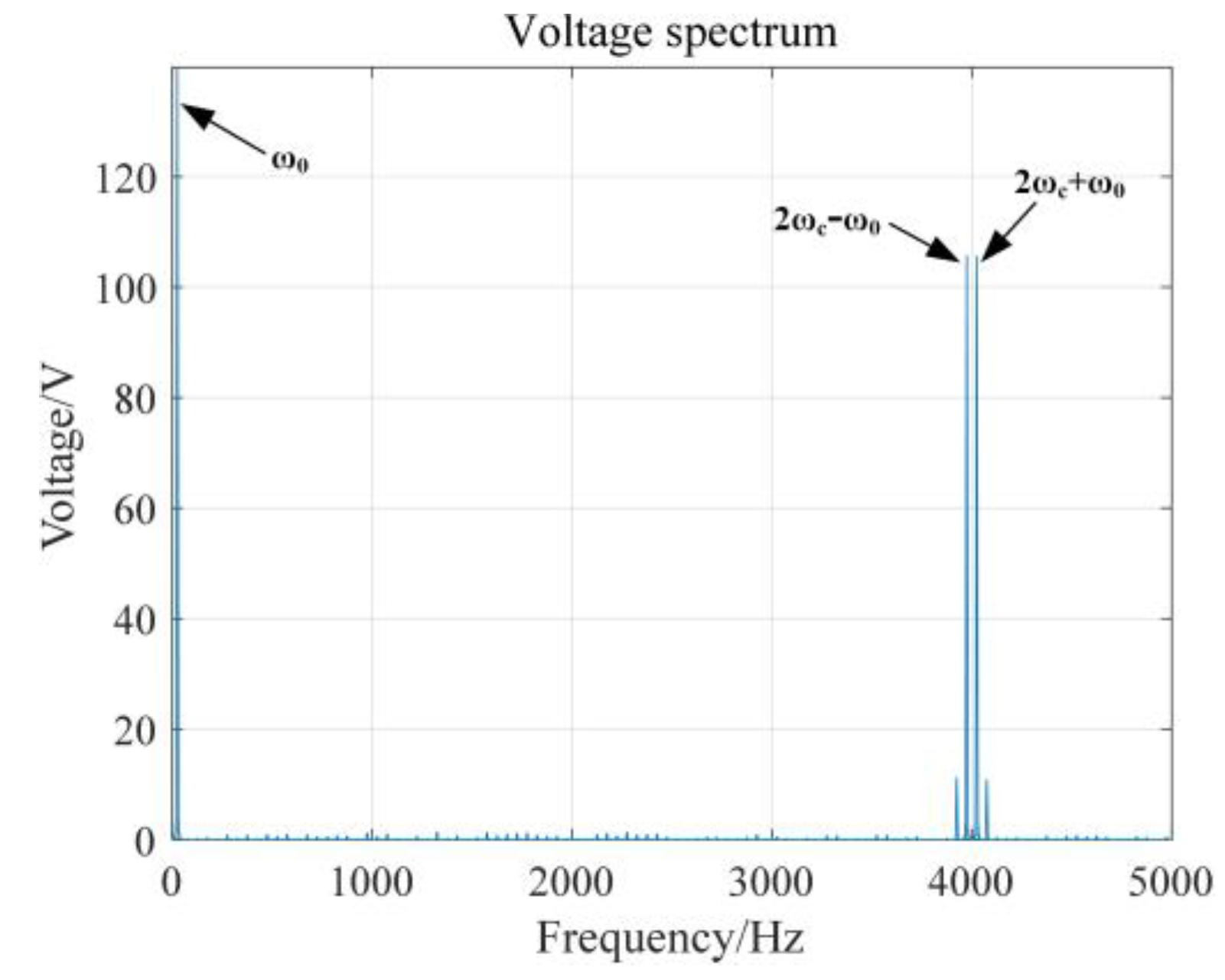
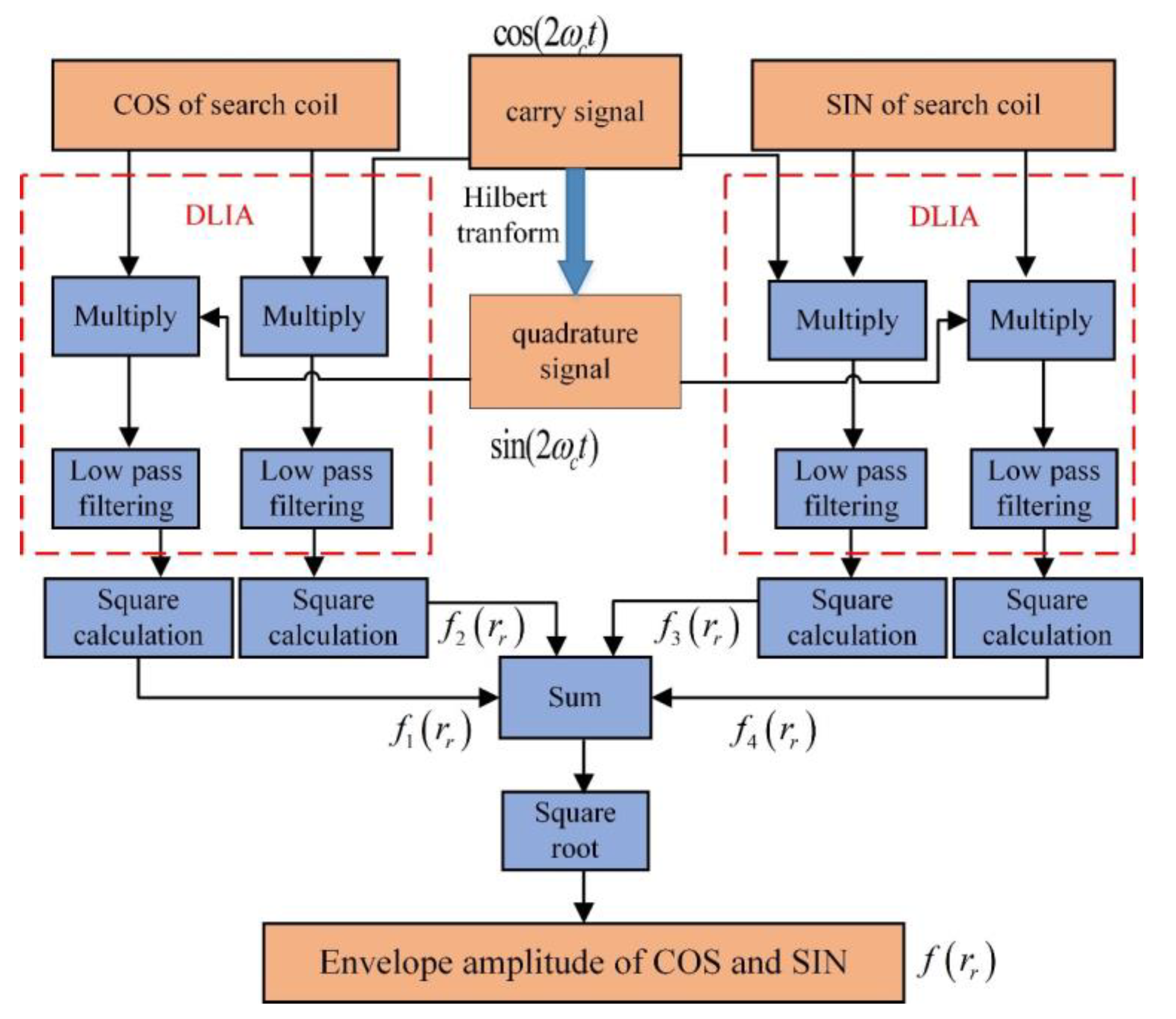
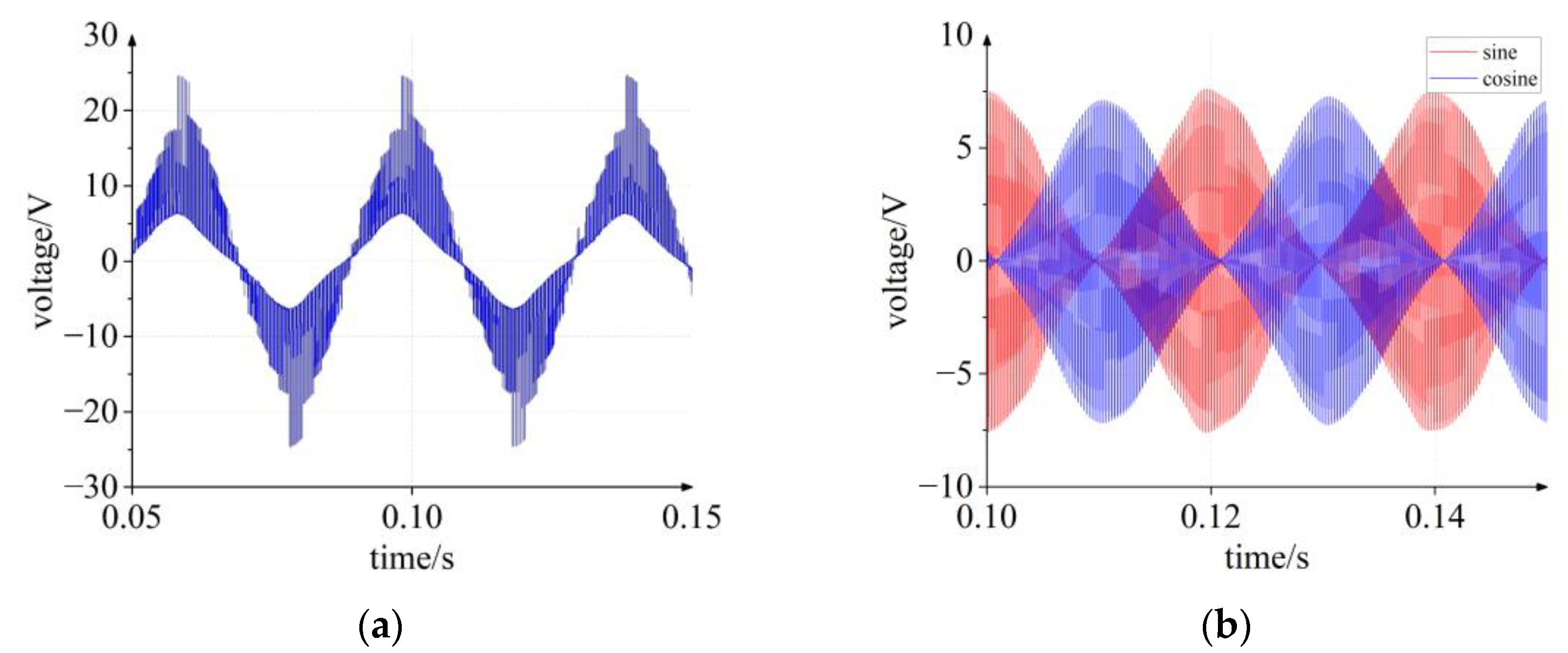
2.3. Method for Estimating Voltage Amplitude
- (1)
- Multiply the original signal by two quadrature reference signals at the carrier frequency;
- (2)
- Obtain the signal envelope by low-pass filtering;
- (3)
- Obtain the amplitude by the two envelopes of sine and cosine.
3. Validation through Simulation
3.1. Search Coil Arrangement Scheme
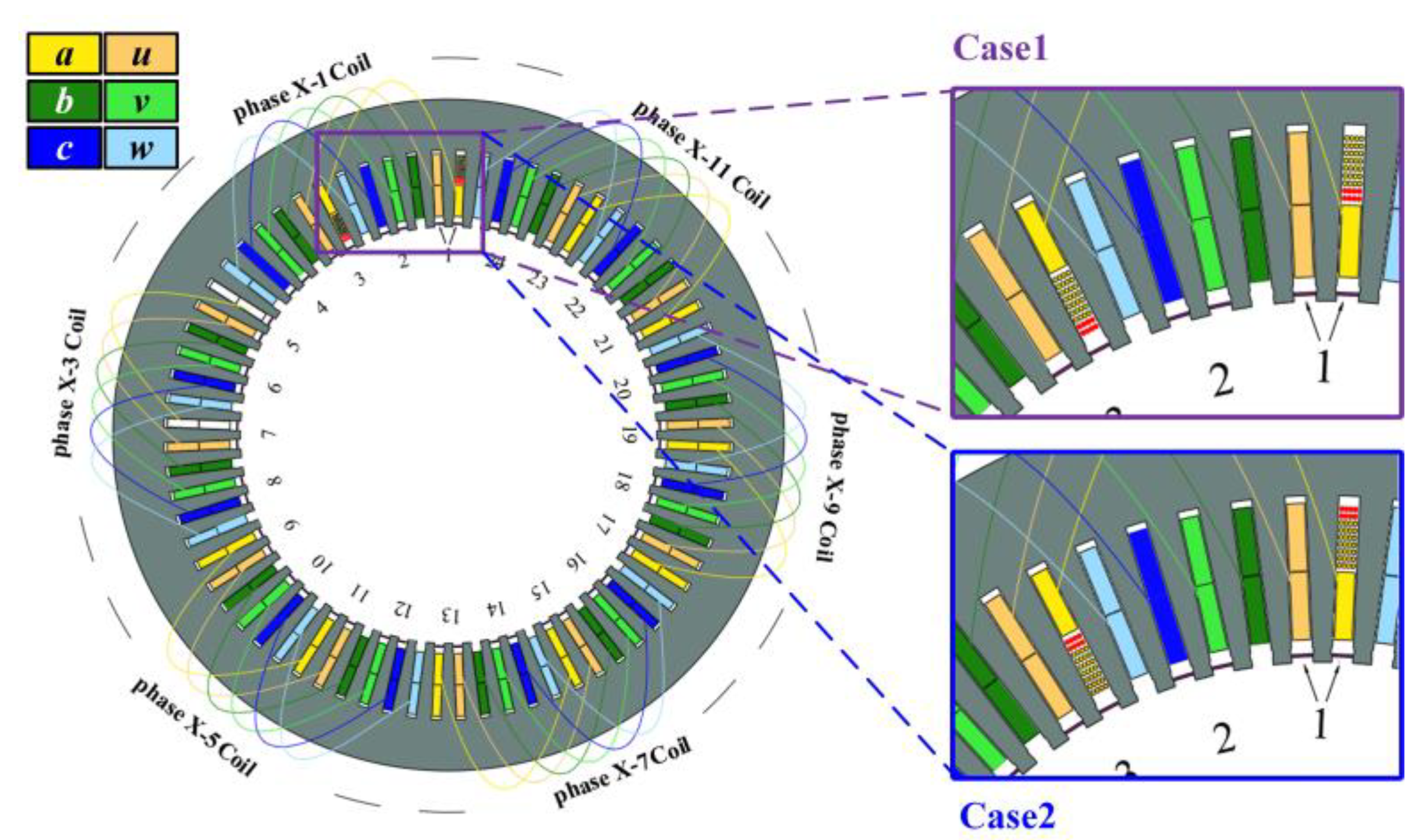
3.2. Precise Modeling for Analyzing Impact of Fault Location
3.3. Simulation Results
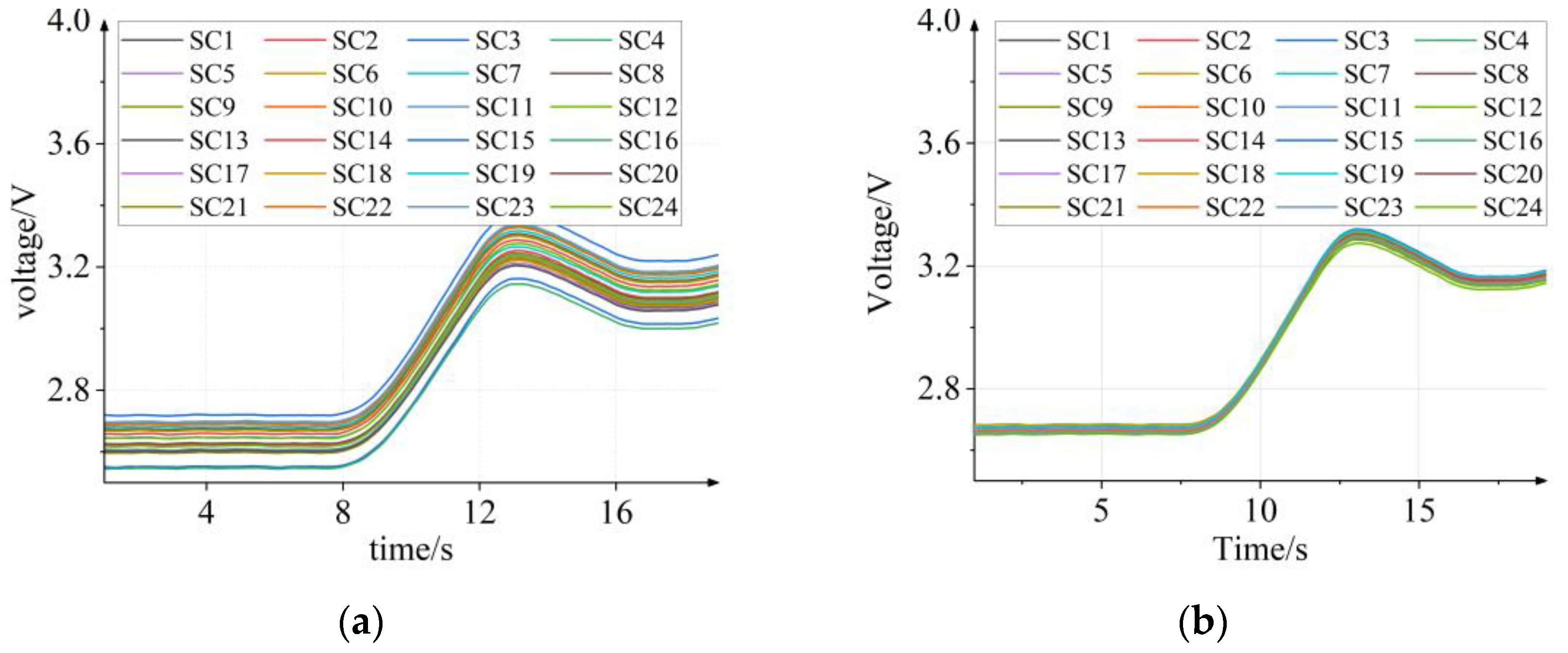
3.3.1. DLIA
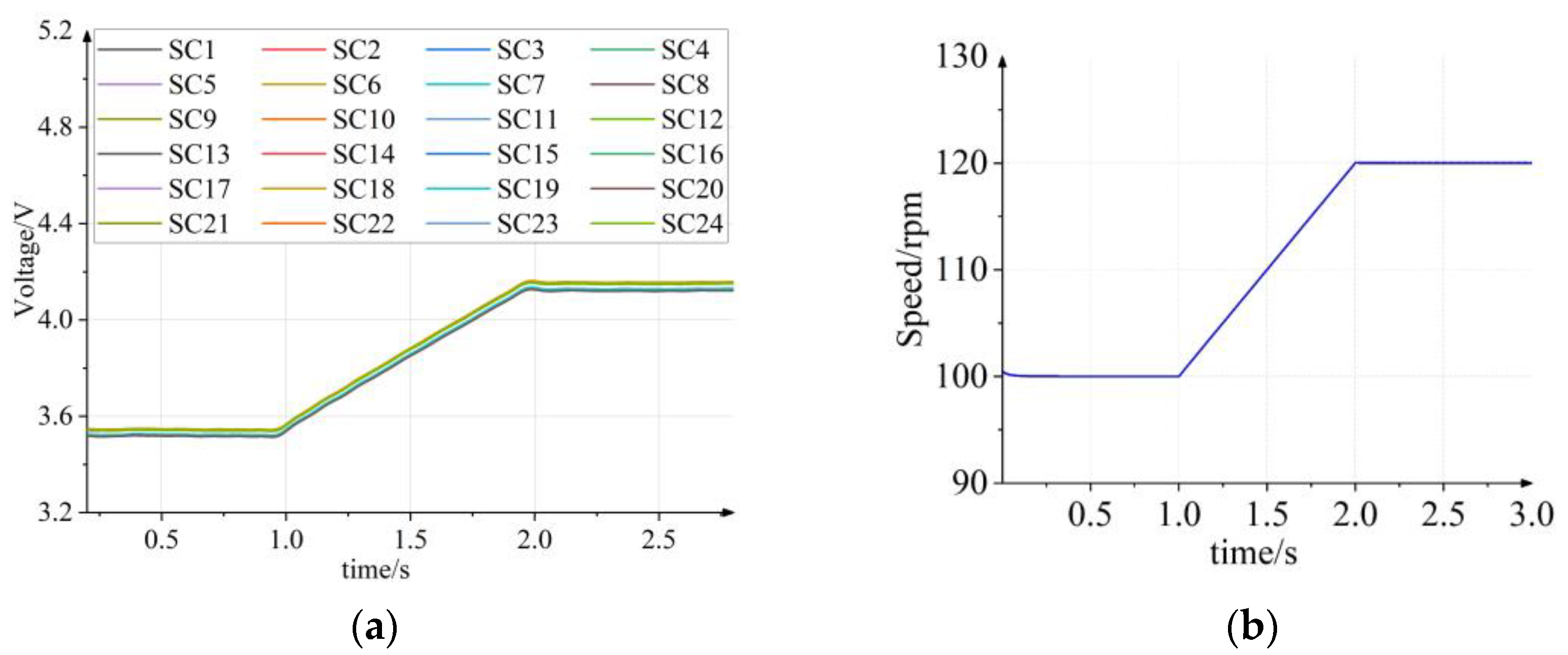
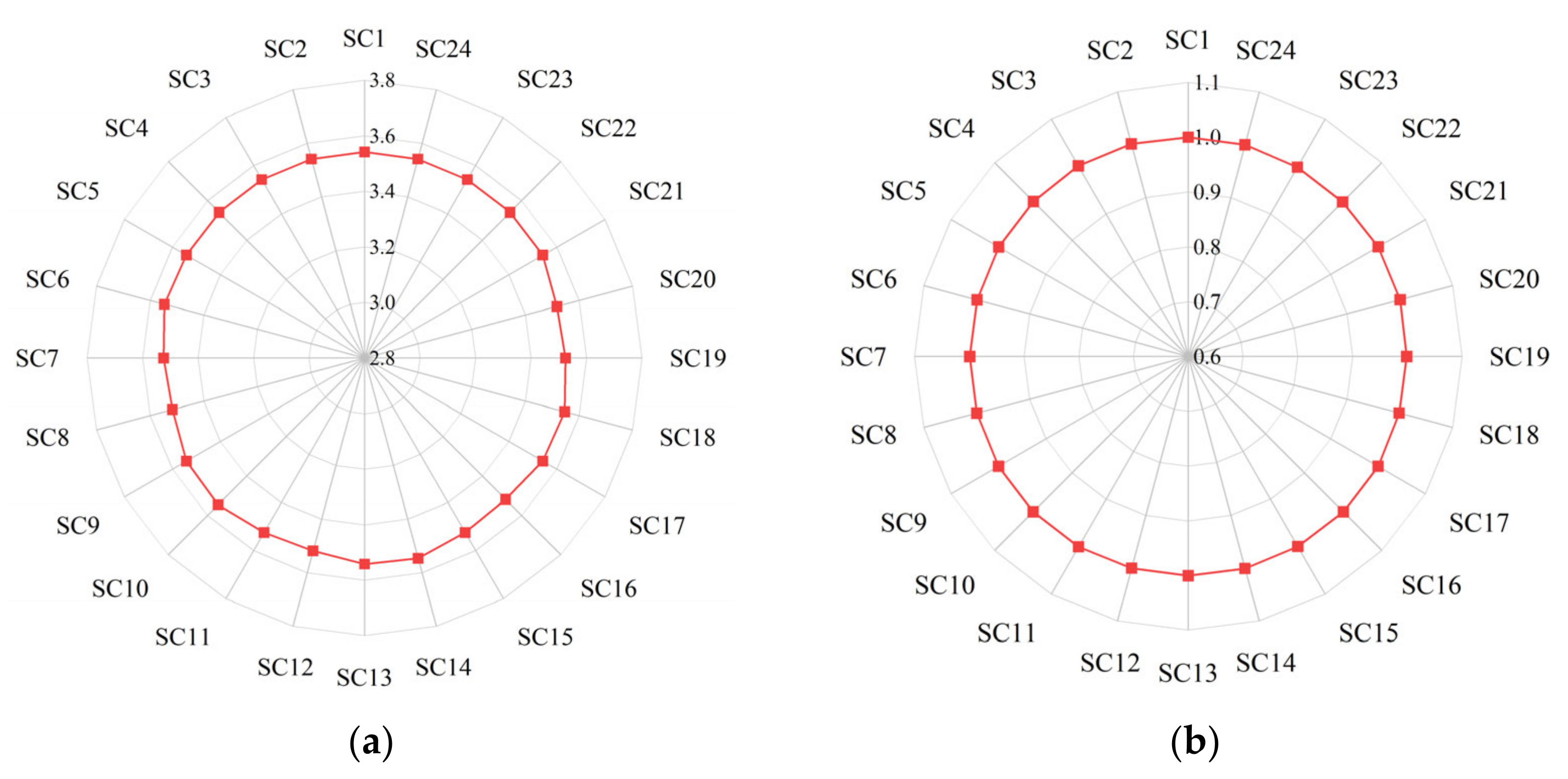
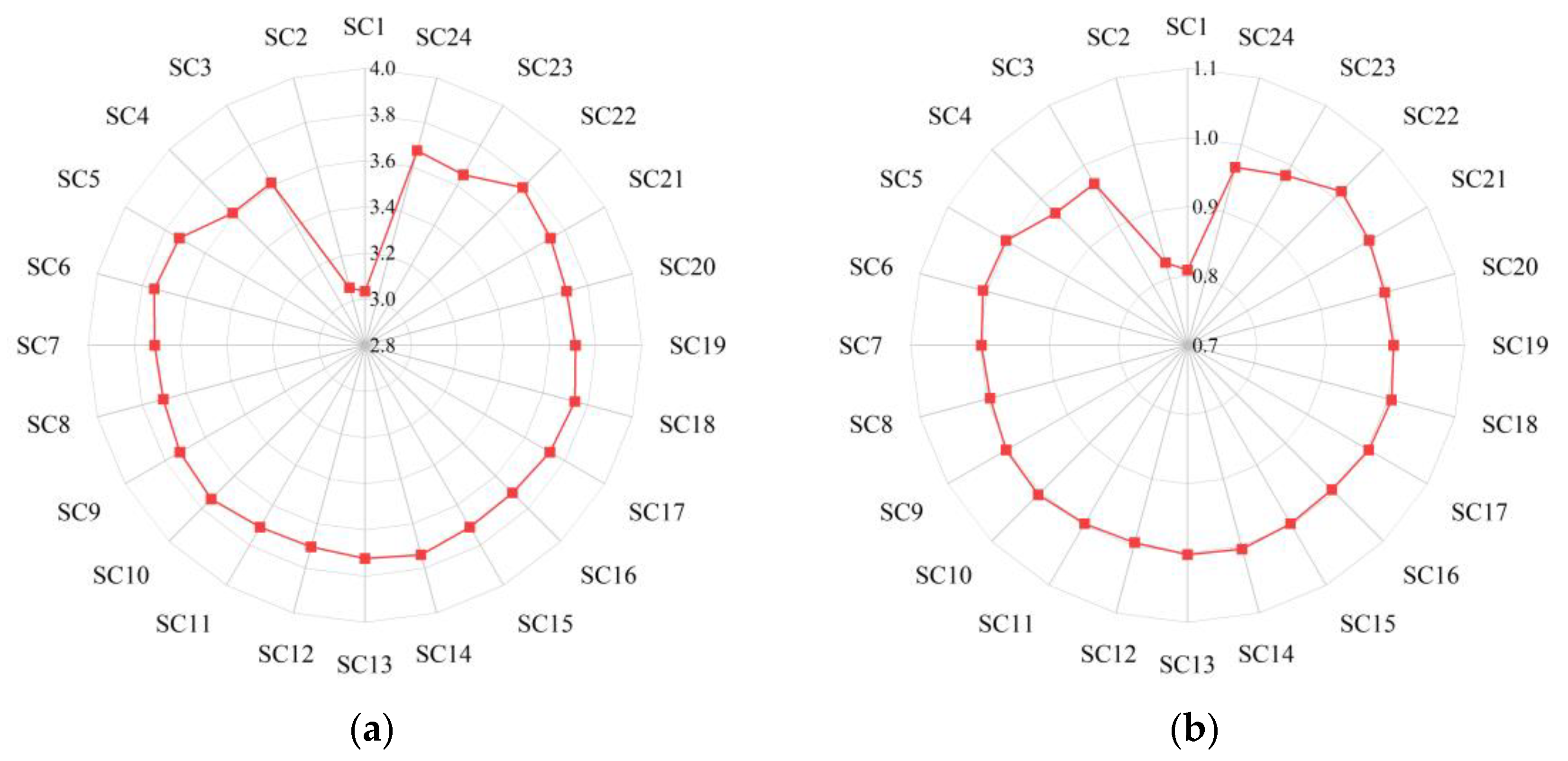
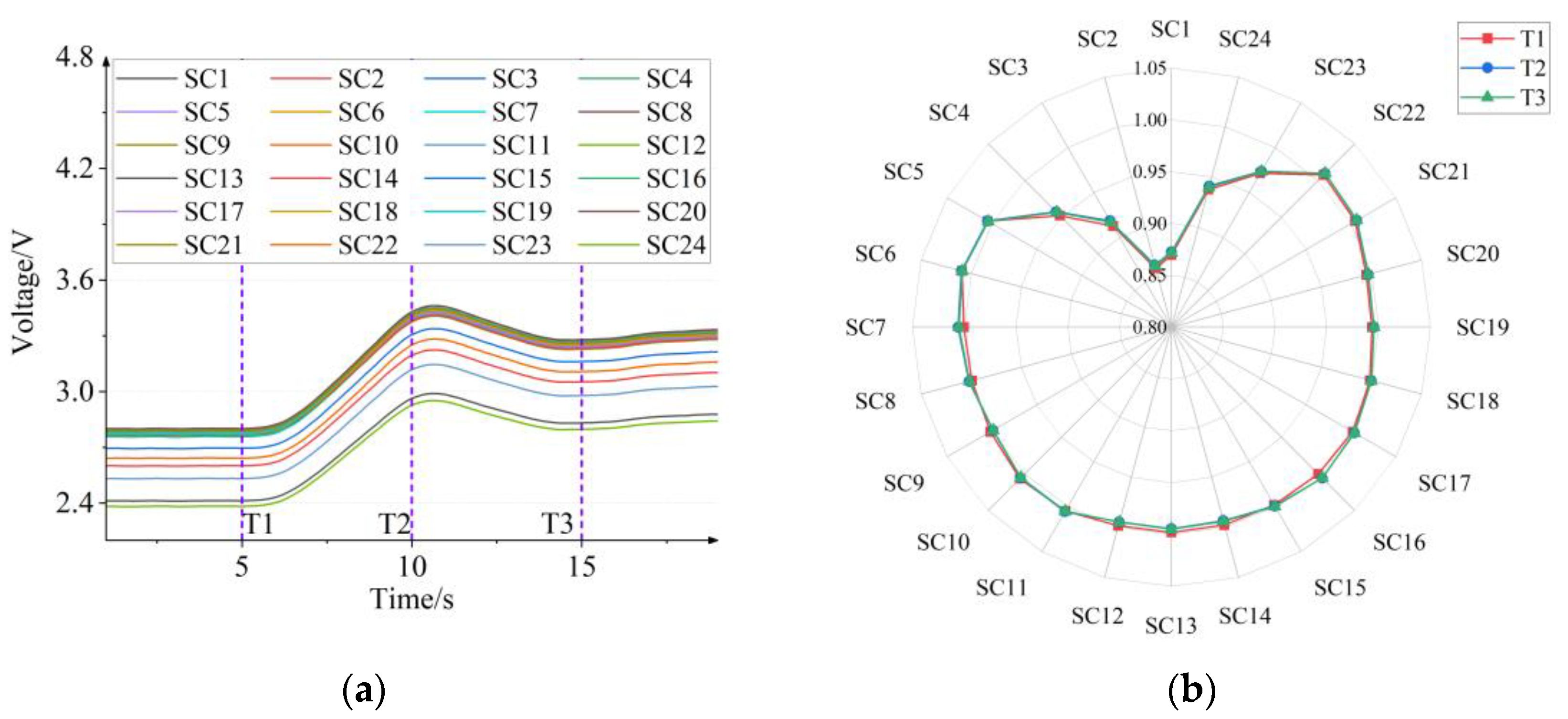
3.3.2. Normalization Process
4. Experimental Validation
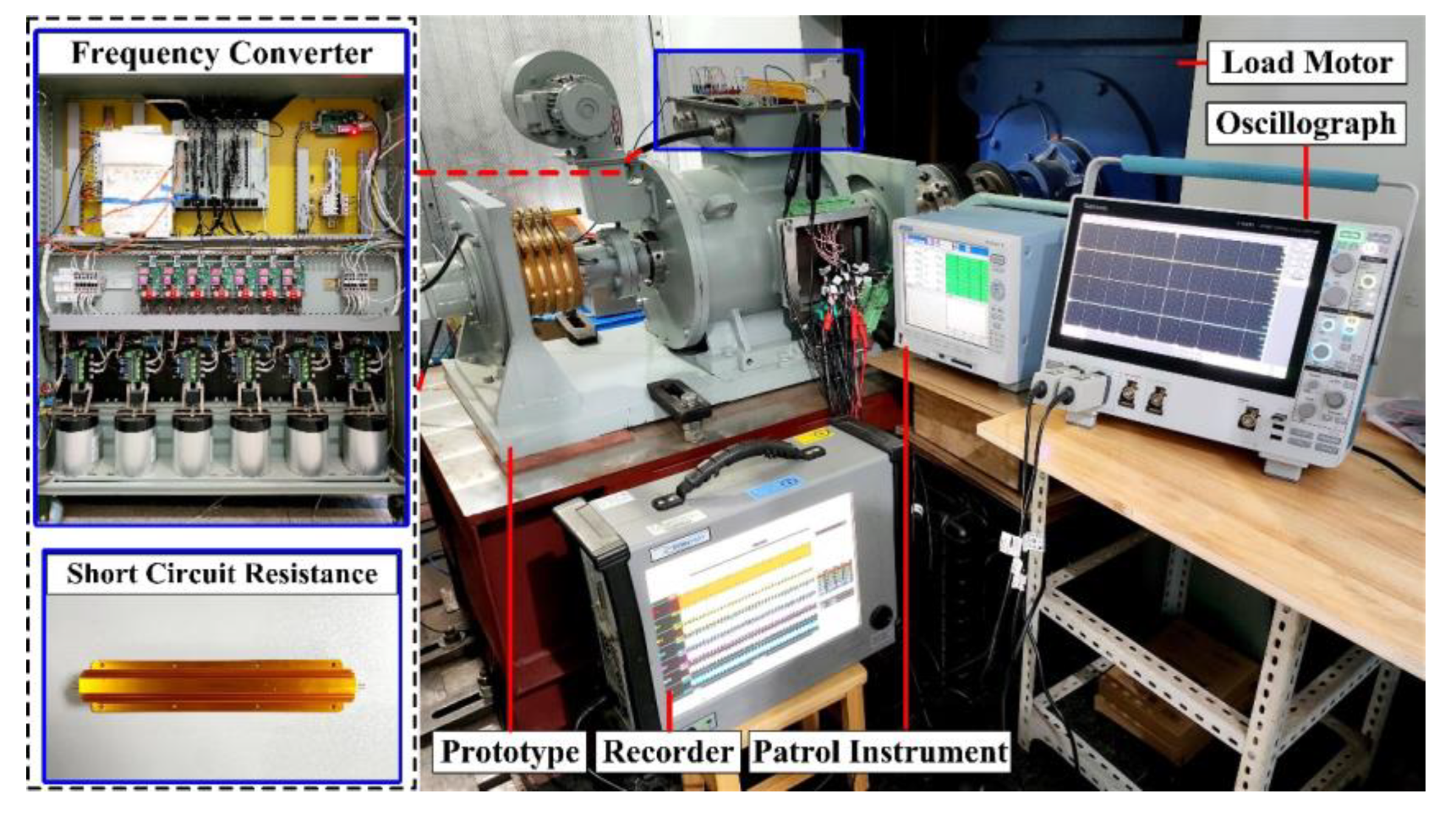
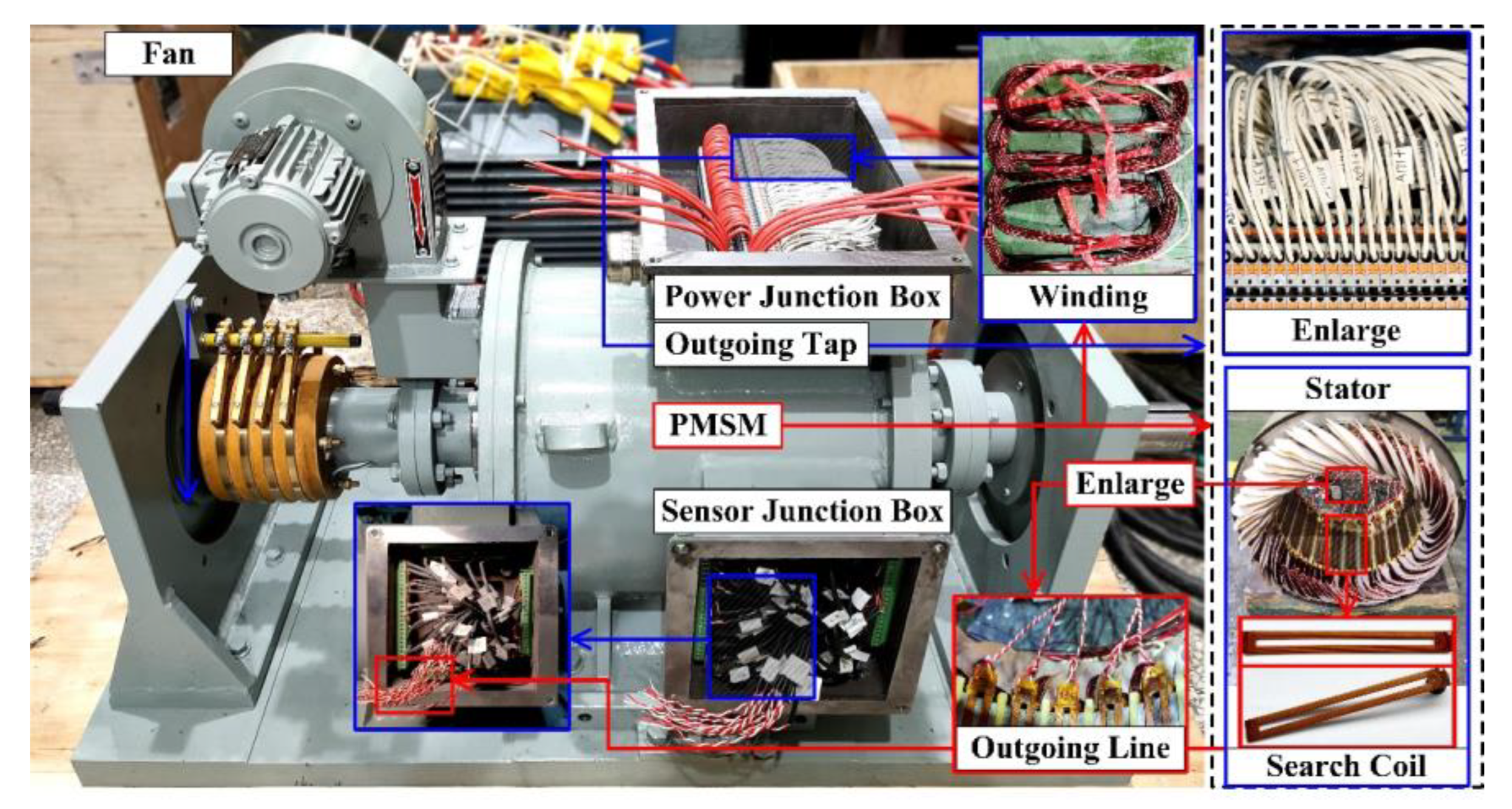
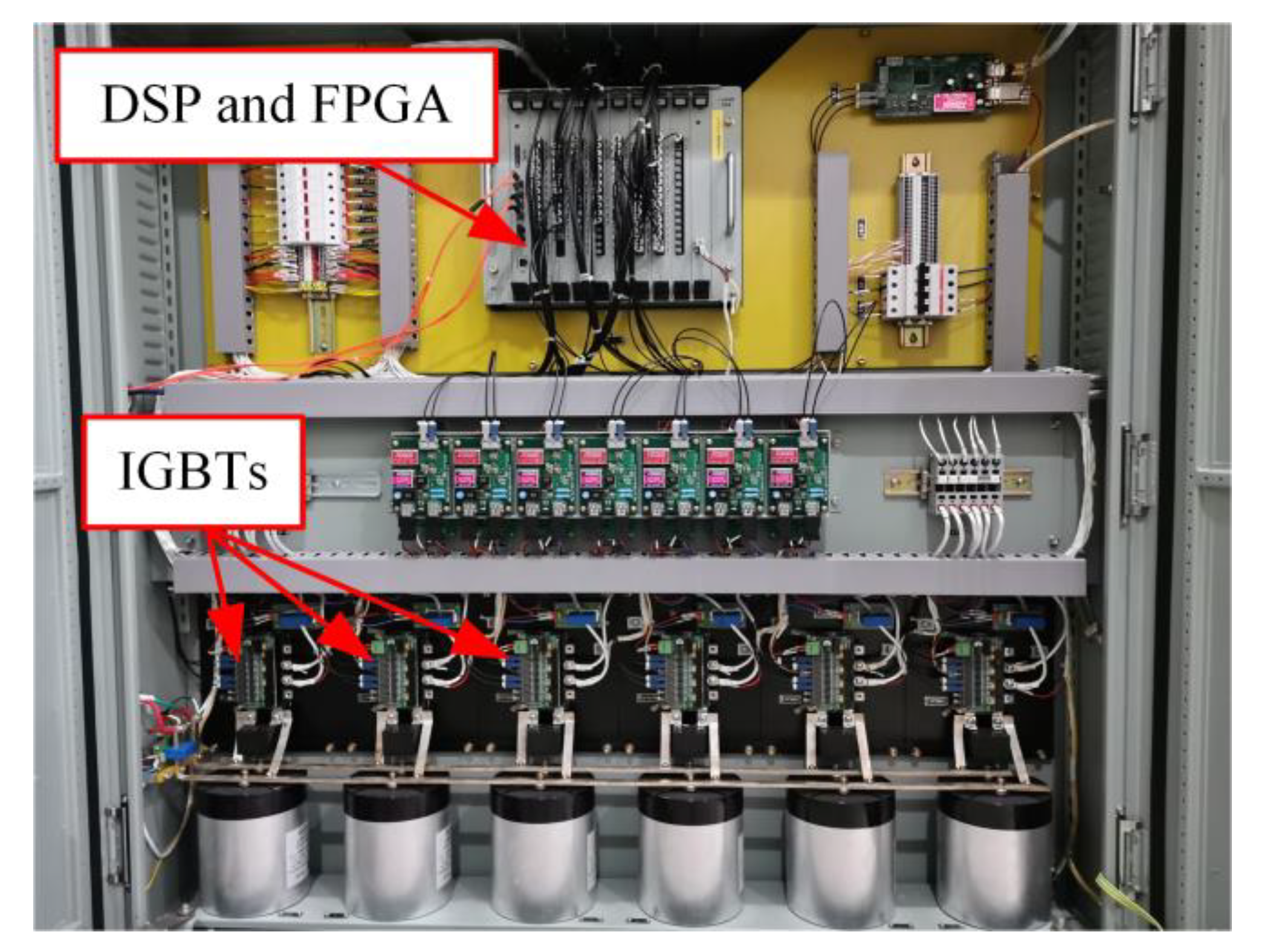
4.1. Experimental Platform
4.2. Calibration
4.3. Test Results under Failure
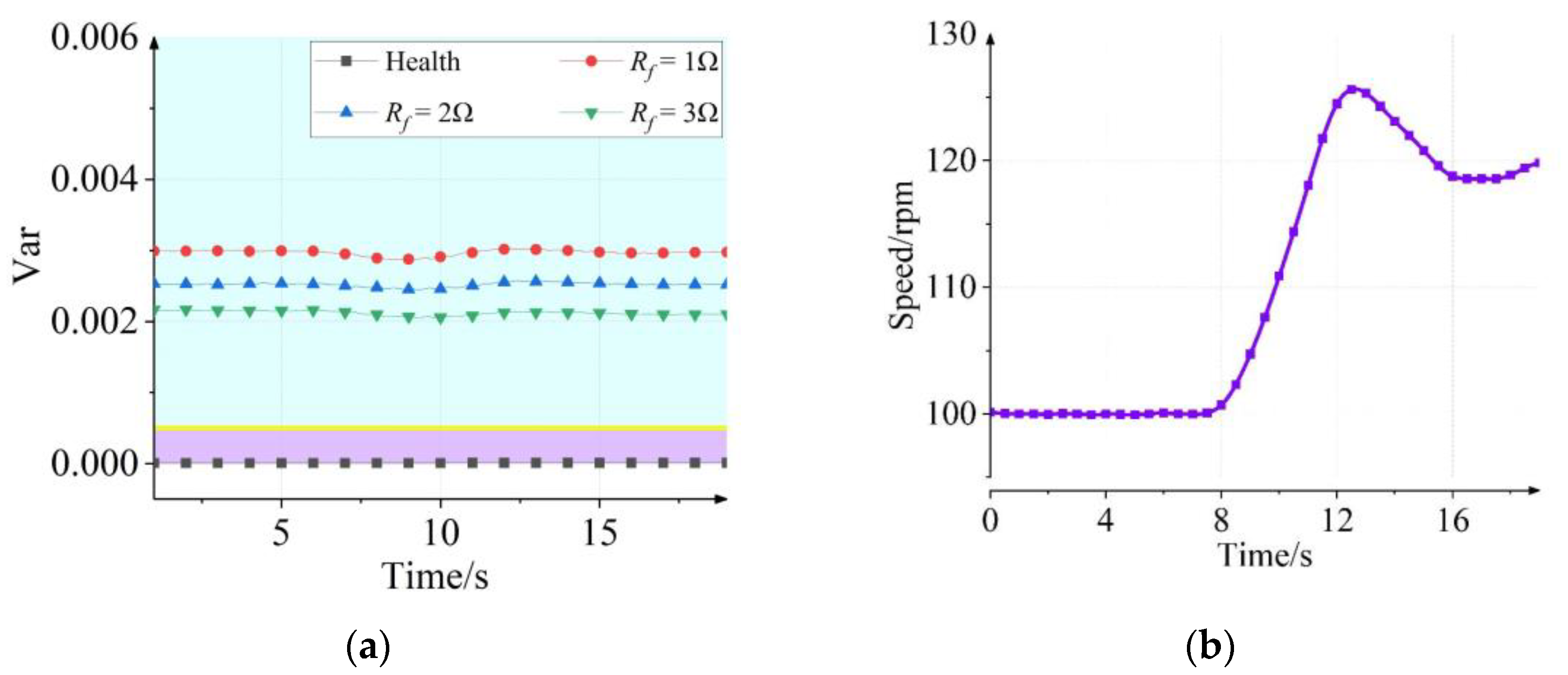
4.3.1. Change in Short Circuit Resistance
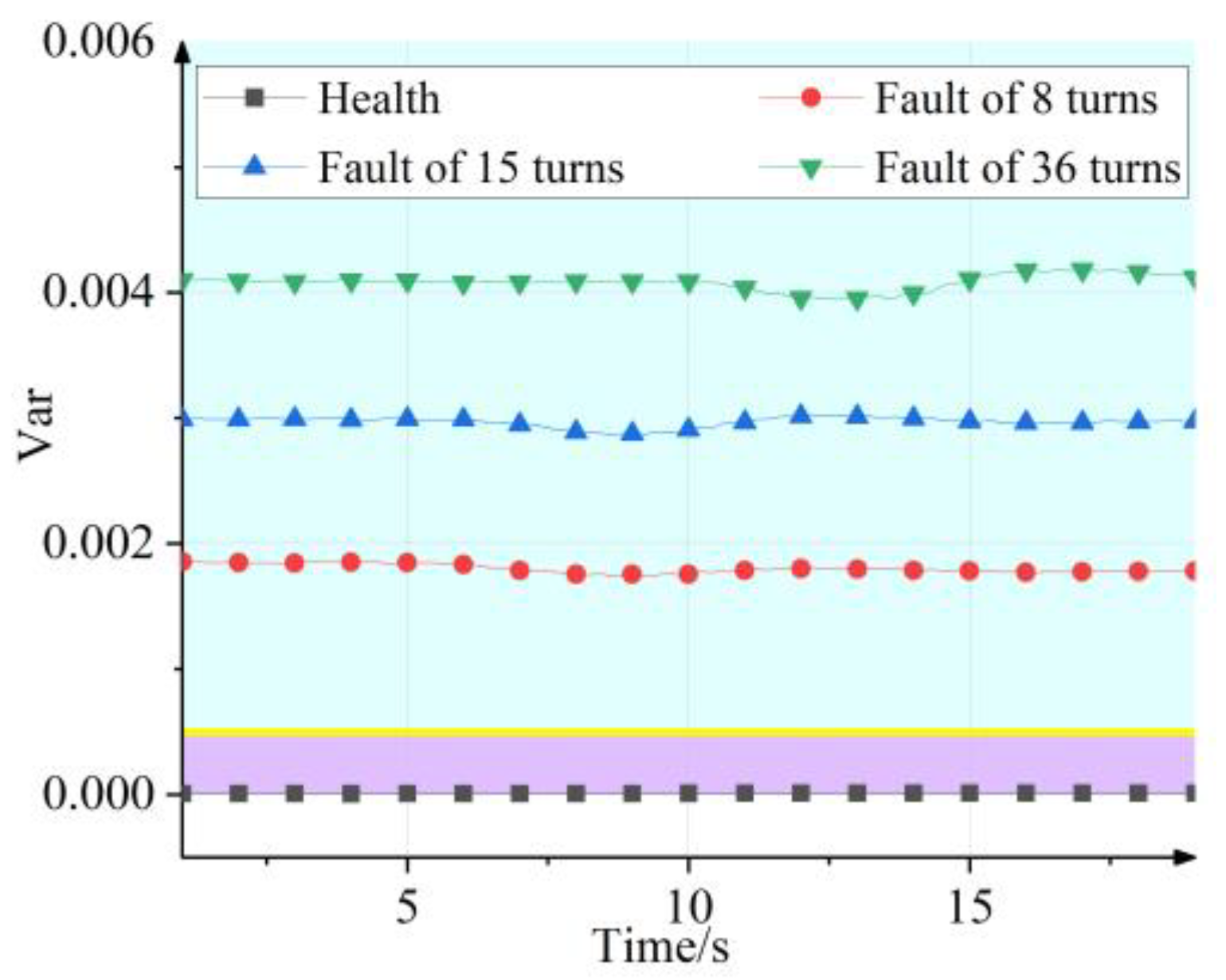
4.3.2. Change in Short Circuit Turns
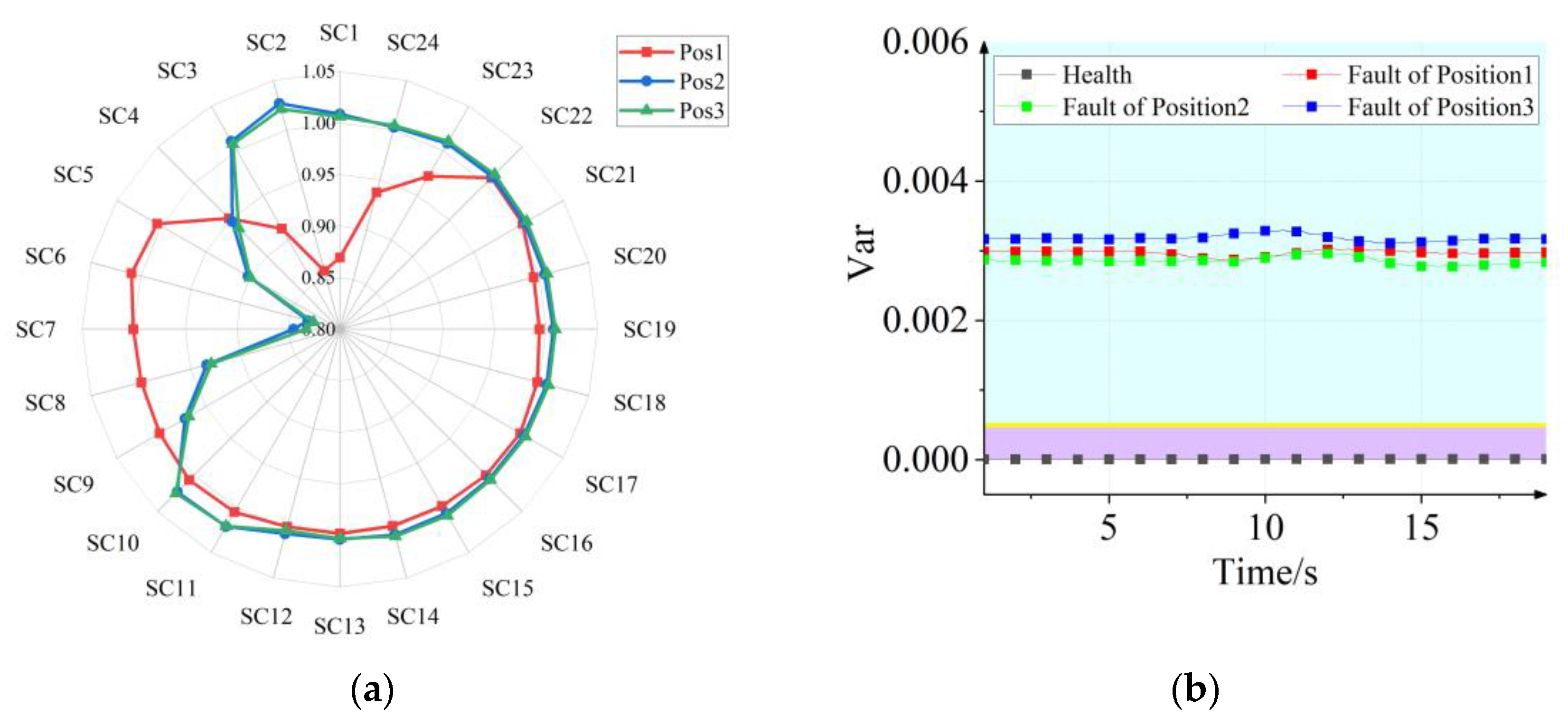
4.3.3. Change in Short Circuit Position
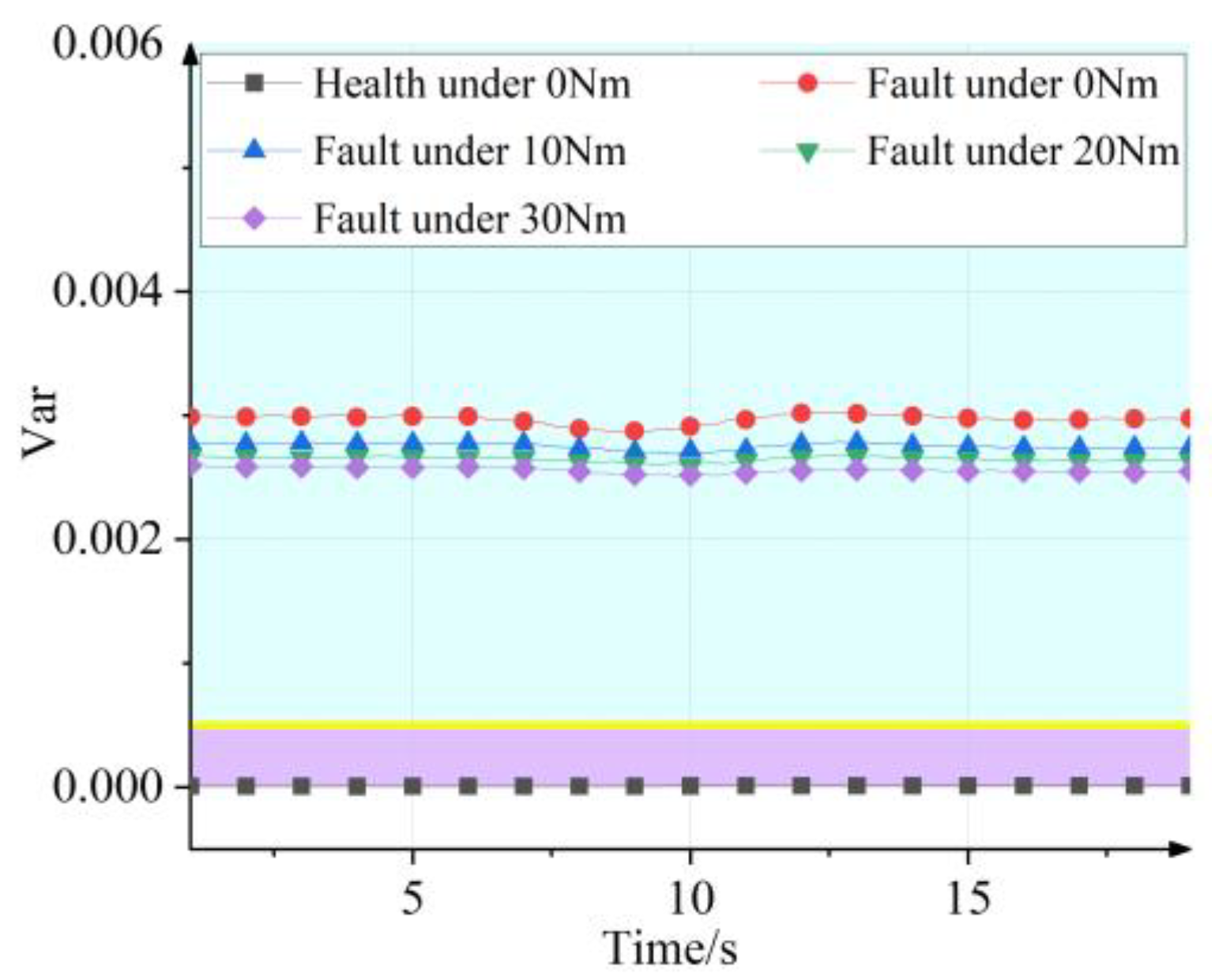
4.3.4. Change in Load
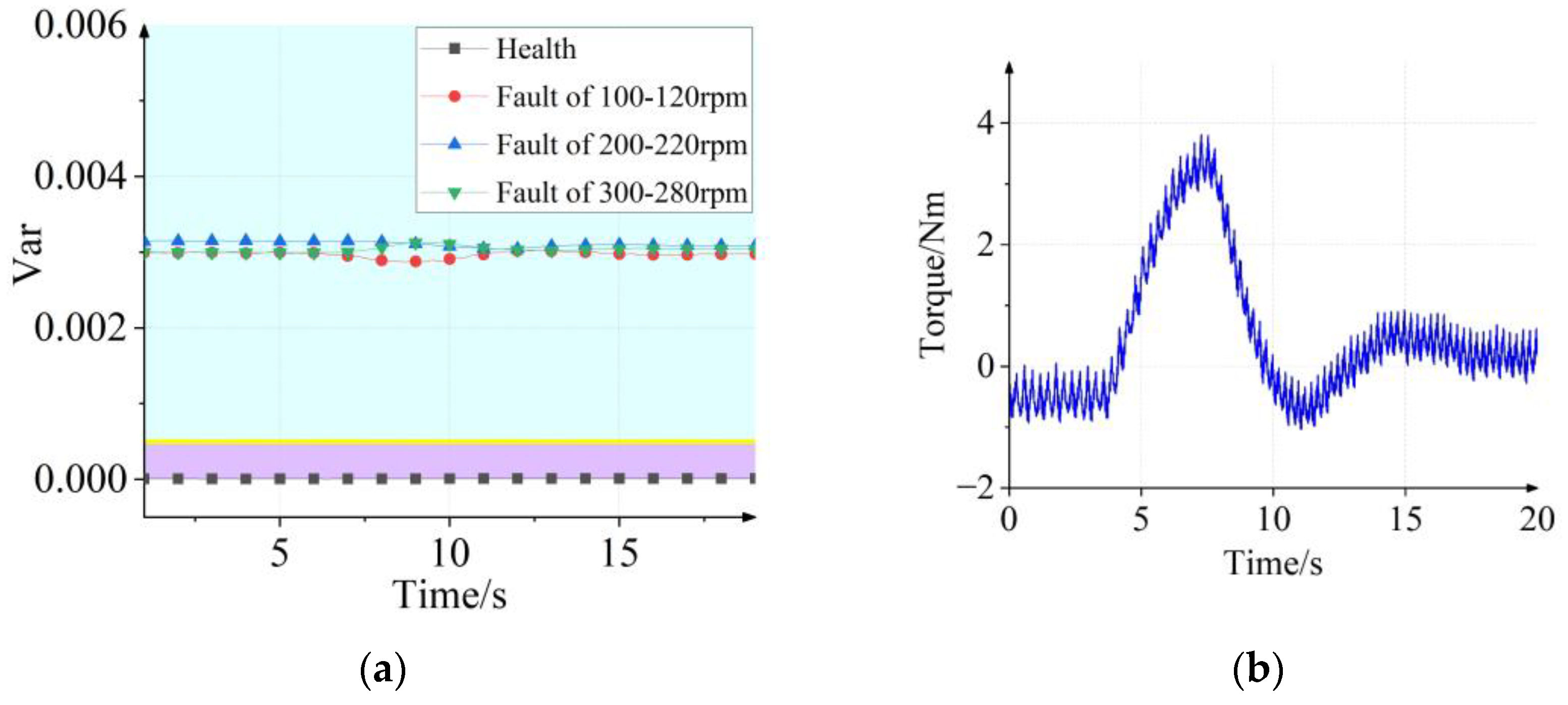
4.3.5. Change in Speed
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Length of unilateral air gap | 2 mm | Slot width | 4.2 mm |
| Stator outer diameter | 290 mm | Thickness of permanent magnet | 9 mm |
| Inner diameter of stator | 180 mm | Overlaying coefficient | 0.97 |
| Rotor outer diameter | 176 mm | Number of stator slots | 72 |
| Inside diameter of rotor | 80 mm | Number of conductors per slot | 72 |
| Stator core length | 88 mm | Number of parallel branches | 1 |
| Yoke thickness | 22 mm | Pitch | 6 |
| Stator core material | 50WW310 | Winding coefficient | 1 |
| Rotor core material | 16Mn | Permanent magnet material | SmCo30 |
Appendix B

References
- Zafarani, M.; Bostanci, E.; Qi, Y.; Goktas, T.; Akin, B. Interturn Short-Circuit Faults in Permanent Magnet Synchronous Machines: An Extended Review and Comprehensive Analysis. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 2173–2191. [Google Scholar] [CrossRef]
- Xu, Z.; Zhang, J.; Cheng, M. Investigation of Signal Injection Methods for Fault Detection of PMSM Drives. IEEE Trans. Energy Convers. 2022, 37, 2207–2216. [Google Scholar] [CrossRef]
- Report of Large Motor Reliability Survey of Industrial and Commercial Installations, Part I. IEEE Trans. Ind. Appl. 1985, IA-21, 853–864. [CrossRef]
- Cheng, S.; Habetler, T.G. Using Only the DC Current Information to Detect Stator Turn Faults in Automotive Claw-Pole Generators. IEEE Trans. Ind. Electron. 2013, 60, 3462–3471. [Google Scholar] [CrossRef]
- Wallmark, O.; Harnefors, L.; Carlson, O. Control algorithms for a fault-tolerant PMSM drive. IEEE Trans. Ind. Electron. 2007, 54, 1973–1980. [Google Scholar] [CrossRef]
- Jeong, H.; Moon, S.; Kim, S.W. An Early Stage Interturn Fault Diagnosis of PMSMs by Using Negative-Sequence Components. IEEE Trans. Ind. Electron. 2017, 64, 5701–5708. [Google Scholar] [CrossRef]
- Wei, D.; Liu, K.; Hu, W.; Peng, X.; Chen, Y.; Ding, R. Short-Time Adaline Based Fault Feature Extraction for Inter-Turn Short Circuit Diagnosis of PMSM via Residual Insulation Monitoring. IEEE Trans. Ind. Electron. 2023, 70, 3103–3114. [Google Scholar] [CrossRef]
- Song, Q.; Wang, M.; Lai, W.; Zhao, S. On Bayesian Optimization-Based Residual CNN for Estimation of Inter-Turn Short Circuit Fault in PMSM. IEEE Trans. Power Electron. 2023, 38, 2456–2468. [Google Scholar] [CrossRef]
- Lee, H.; Jeong, H.; Koo, G.; Ban, J.; Kim, S.W. Attention Recurrent Neural Network-Based Severity Estimation Method for Interturn Short-Circuit Fault in Permanent Magnet Synchronous Machines. IEEE Trans. Ind. Electron. 2021, 68, 3445–3453. [Google Scholar] [CrossRef]
- Wang, H.; Wang, J.; Wang, X.; Lu, S.; Hu, C.; Cao, W. Detection and Evaluation of the Interturn Short Circuit Fault in a BLDC-Based Hub Motor. IEEE Trans. Ind. Electron. 2023, 70, 3055–3068. [Google Scholar] [CrossRef]
- Ebrahimi, B.M.; Faiz, J. Feature Extraction for Short-Circuit Fault Detection in Permanent-Magnet Synchronous Motors Using Stator-Current Monitoring. IEEE Trans. Power Electron. 2010, 25, 2673–2682. [Google Scholar] [CrossRef]
- Park, J.; Hur, J. Detection of Inter-Turn and Dynamic Eccentricity Faults Using Stator Current Frequency Pattern in IPM-Type BLDC Motors. IEEE Trans. Ind. Electron. 2016, 63, 1771–1780. [Google Scholar] [CrossRef]
- Zanardelli, W.G.; Strangas, E.G.; Aviyente, S. Identification of Intermittent Electrical and Mechanical Faults in Permanent-Magnet AC Drives Based on Time–Frequency Analysis. IEEE Trans. Ind. Appl. 2007, 43, 971–980. [Google Scholar] [CrossRef]
- Obeid, N.H.; Battiston, A.; Boileau, T.; Nahid-Mobarakeh, B. Early Intermittent Interturn Fault Detection and Localization for a Permanent Magnet Synchronous Motor of Electrical Vehicles Using Wavelet Transform. IEEE Trans. Transp. Electrif. 2017, 3, 694–702. [Google Scholar] [CrossRef]
- Khan, M.; Rahman, M.A. Development and Implementation of a Novel Fault Diagnostic and Protection Technique for IPM Motor Drives. IEEE Trans. Ind. Electron. 2009, 56, 85–92. [Google Scholar] [CrossRef]
- Wang, C.; Liu, X.; Chen, Z. Incipient Stator Insulation Fault Detection of Permanent Magnet Synchronous Wind Generators Based on Hilbert–Huang Transformation. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Saavedra, H.; Urresty, J.-C.; Riba, J.-R.; Romeral, L. Detection of interturn faults in PMSMs with different winding configurations. Energy Convers. Manag. 2014, 79, 534–542. [Google Scholar] [CrossRef]
- Ruiz, J.R.; Rosero, J.A.; Espinosa, A.G.; Romeral, L. Detection of Demagnetization Faults in Permanent-Magnet Synchronous Motors Under Nonstationary Conditions. IEEE Trans. Magn. 2009, 45, 2961–2969. [Google Scholar] [CrossRef]
- Mohammed, O.A.; Liu, Z.; Liu, S. Internal Short Circuit Fault Diagnosis for PM Machines Using FE-Based Phase Variable Model and Wavelets Analysis. IEEE Trans. Magn. 2007, 43, 1729–1732. [Google Scholar] [CrossRef]
- Huang, N.; Shen, Z.; Long, S.R.; Wu, M.L.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.-C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Hang, J.; Zhang, J.; Cheng, M.; Huang, J. Online Interturn Fault Diagnosis of Permanent Magnet Synchronous Machine Using Zero-Sequence Components. IEEE Trans. Power Electron. 2015, 30, 6731–6741. [Google Scholar] [CrossRef]
- Zhang, J.; Xu, Z.; Wang, J.; Zhao, J.; Din, Z.U.; Cheng, M. Detection and Discrimination of Incipient Stator Faults for Inverter-Fed Permanent Magnet Synchronous Machines. IEEE Trans. Ind. Electron. 2020, 68, 7505–7515. [Google Scholar] [CrossRef]
- Hu, R.; Wang, J.; Mills, A.R.; Chong, E.; Sun, Z. Current-Residual-Based Stator Interturn Fault Detection in Permanent Magnet Machines. IEEE Trans. Ind. Electron. 2021, 68, 59–69. [Google Scholar] [CrossRef]
- Bouzid, M.B.K.; Champenois, G. An Efficient Simplified Physical Faulty Model of a Permanent Magnet Synchronous Generator Dedicated to Stator Fault Diagnosis Part II: Automatic Stator Fault Diagnosis. IEEE Trans. Ind. Appl. 2017, 53, 2762–2771. [Google Scholar] [CrossRef]
- Botao, W.; Chuanwen, S.; Kexing, X.; Tingting, Z. Turn-to-turn short circuit of motor stator fault diagnosis in continuous state based on deep auto-encoder. IET Electr. Power Appl. 2019, 13, 1598–1606. [Google Scholar] [CrossRef]
- Zeng, C.; Huang, S.; Lei, J.; Wan, Z.; Yang, Y. Online Rotor Fault Diagnosis of Permanent Magnet Synchronous Motors Based on Stator Tooth Flux. IEEE Trans. Ind. Appl. 2021, 57, 2366–2377. [Google Scholar] [CrossRef]
- Da, Y.; Shi, X.; Krishnamurthy, M. A New Approach to Fault Diagnostics for Permanent Magnet Synchronous Machines Using Electromagnetic Signature Analysis. IEEE Trans. Power Electron. 2013, 28, 4104–4112. [Google Scholar] [CrossRef]
- Kim, K.; Lee, S.; Hur, J. Diagnosis Technique Using a Detection Coil in BLDC Motors With Interturn Faults. IEEE Trans. Magn. 2014, 50, 885–888. [Google Scholar] [CrossRef]
- Naderi, P. Magnetic-equivalent-circuit approach for inter-turn and demagnetisation faults analysis in surface mounted permanent-magnet synchronous machines using pole specific search-coil technique. IET Electr. Power Appl. 2018, 12, 916–928. [Google Scholar] [CrossRef]
- Zeng, C.; Huang, S.; Yang, Y.; Wu, D. Inter-turn fault diagnosis of permanent magnet synchronous machine based on tooth magnetic flux analysis. IET Electr. Power Appl. 2018, 12, 837–844. [Google Scholar] [CrossRef]
- Huang, W.; Du, B.; Li, T.; Sun, Y.; Cheng, Y.; Cui, S. Interturn Short-Circuit Fault Diagnosis of Interior Permanent Magnet Synchronous Motor for Electric Vehicle Based on Search Coil. IEEE Trans. Power Electron. 2023, 38, 2506–2515. [Google Scholar] [CrossRef]
- Qi, Y.; Bostanci, E.; Zafarani, M.; Akin, B. Severity Estimation of Interturn Short Circuit Fault for PMSM. IEEE Trans. Ind. Electron. 2019, 66, 7260–7269. [Google Scholar] [CrossRef]
- Holmes, G.; Lipo, T. Pulse Width Modulation for Power Converter; Wiley-IEEE Press: Hoboken, NJ, USA, 2006. [Google Scholar] [CrossRef]



















| Rated Power (kW) | 0.94 | Rated Speed (r/min) | 300 |
| Rated Torque (Nm) | 30 | Stator Resistance (Ω) | 4.3 |
| Number of Pole Pairs | 6 | PM Flux Linkage (Wb) | 0.98 |
| a | b | c | u | v | w | af | |
|---|---|---|---|---|---|---|---|
| SC1 | −0.00728 | −0.00823 | −0.0051 | −0.01157 | 0.00345 | −0.00457 | 0.1552 |
| SC2 | 0.00498 | 0.01234 | 0.00044 | 0.00795 | 0.00723 | −0.00985 | 0.01348 |
| SC3 | −0.03312 | −0.00842 | −0.00524 | −0.01152 | 0.00342 | −0.00464 | 0.21956 |
| SC4 | 0.00828 | 0.0126 | −0.00492 | 0.00735 | 0.00778 | −0.01182 | −0.04365 |
| SC5 | 0.00372 | −0.00777 | −0.00524 | −0.01185 | 0.00647 | −0.00461 | 0.00227 |
| SC6 | 0.00741 | 0.0125 | −0.00169 | 0.00796 | 0.0078 | −0.01193 | 0.01668 |
| SC7 | 0.00442 | −0.00801 | −0.00473 | −0.01118 | 0.00369 | −0.00423 | 0.00389 |
| SC8 | 0.00653 | 0.01217 | 0.00085 | 0.0081 | 0.00721 | −0.01075 | 0.01682 |
| SC9 | 0.00379 | −0.00812 | −0.00528 | −0.01179 | 0.00403 | −0.00469 | 0.00417 |
| SC10 | 0.00718 | 0.01242 | −0.0026 | 0.00787 | 0.00761 | −0.01165 | 0.0177 |
| SC11 | 0.00236 | −0.00753 | −0.0052 | −0.01172 | 0.0059 | −0.00458 | 0.00484 |
| SC12 | 0.00677 | 0.0126 | −0.0031 | 0.00783 | 0.00752 | −0.01035 | 0.01801 |
| SC13 | 0.00404 | −0.00802 | −0.00506 | −0.01158 | 0.00379 | −0.00446 | 0.00539 |
| SC14 | 0.00695 | 0.01244 | −9.946 × 10−4 | 0.00773 | 0.00738 | −0.0098 | 0.01795 |
| SC15 | 0.0034 | −0.00766 | −0.00522 | −0.01182 | 0.00531 | −0.0046 | 0.00548 |
| SC16 | 0.00668 | 0.01262 | −0.00249 | 0.00776 | 0.00747 | −0.01057 | 0.01805 |
| SC17 | 0.00309 | −0.00751 | −0.00517 | −0.01183 | 0.00559 | −0.00451 | 0.00556 |
| SC18 | 0.00722 | 0.01264 | −0.00193 | 0.00788 | 0.00766 | −0.01048 | 0.01796 |
| SC19 | 0.0036 | −0.00764 | −0.00489 | −0.01155 | 0.00517 | −0.00428 | 0.00565 |
| SC20 | 0.00685 | 0.01218 | −0.00196 | 0.0079 | 0.00755 | −0.01316 | 0.01748 |
| SC21 | 0.00408 | −0.008 | −0.00509 | −0.01165 | 0.00347 | −0.00452 | 0.005 |
| SC22 | 0.00707 | 0.01255 | −0.00194 | 0.00776 | 0.00749 | −0.01018 | 0.01668 |
| SC23 | 0.003 | −0.00796 | −0.00483 | −0.0112 | 0.00346 | −0.00422 | 0.00475 |
| SC24 | 0.007 | 0.01243 | −0.00448 | 0.00725 | 0.00765 | −0.01199 | 0.01248 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, W.; Chen, J.; Hu, J.; Lv, K.; Liu, H. Search-Coil Based Stator Interturn Fault Detection in Permanent Magnet Machines Running under Dynamic Condition. Electronics 2023, 12, 2827. https://doi.org/10.3390/electronics12132827
Huang W, Chen J, Hu J, Lv K, Liu H. Search-Coil Based Stator Interturn Fault Detection in Permanent Magnet Machines Running under Dynamic Condition. Electronics. 2023; 12(13):2827. https://doi.org/10.3390/electronics12132827
Chicago/Turabian StyleHuang, Wen, Junquan Chen, Jinghua Hu, Ke Lv, and Haitao Liu. 2023. "Search-Coil Based Stator Interturn Fault Detection in Permanent Magnet Machines Running under Dynamic Condition" Electronics 12, no. 13: 2827. https://doi.org/10.3390/electronics12132827