
Underwater Noise Modeling and Its Application in Noise Classification with Small-Sized Samples

Abstract
:1. Introduction
- (1)
- A UN generation model to simulate the nine typical noise types with certain PSD and kurtosis, which can augment the noise sample;
- (2)
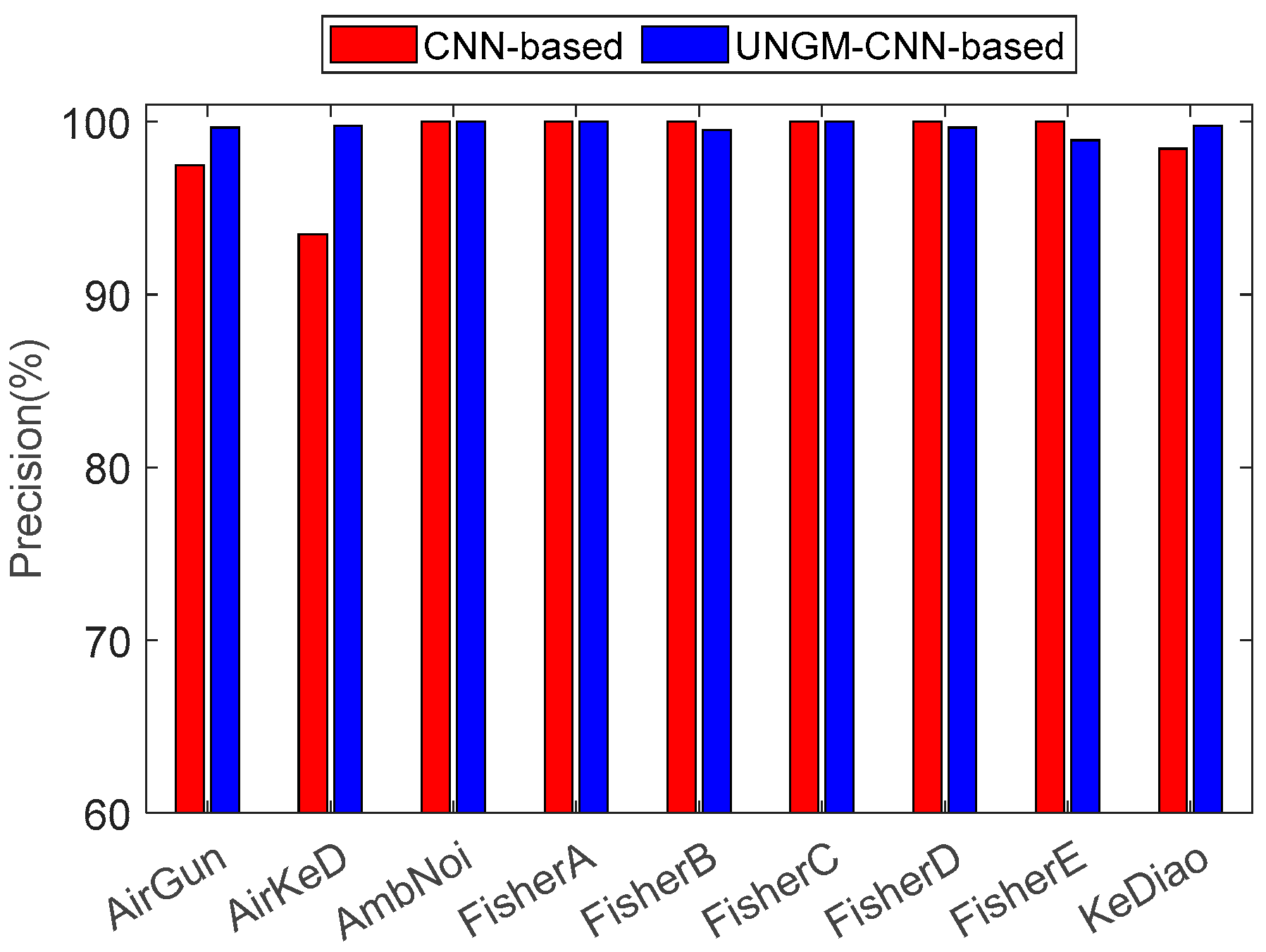
- UN-generation model-based CNN that can classify nine sources of ocean noise, namely, air-gun noise, mixed air-gun and vessel noise, ambient noise, KeDiao vessel, and five fishing vessels;
- (3)
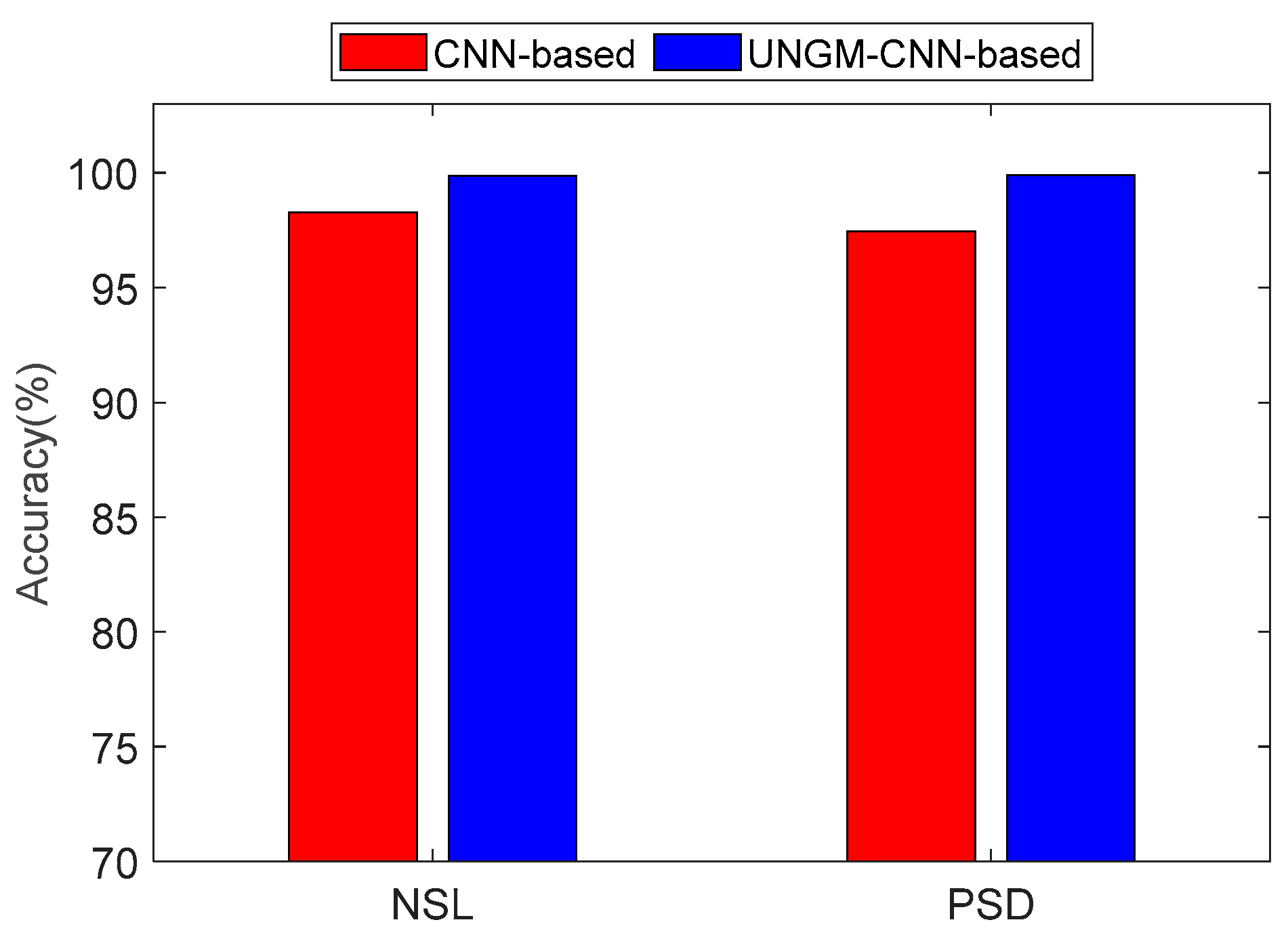
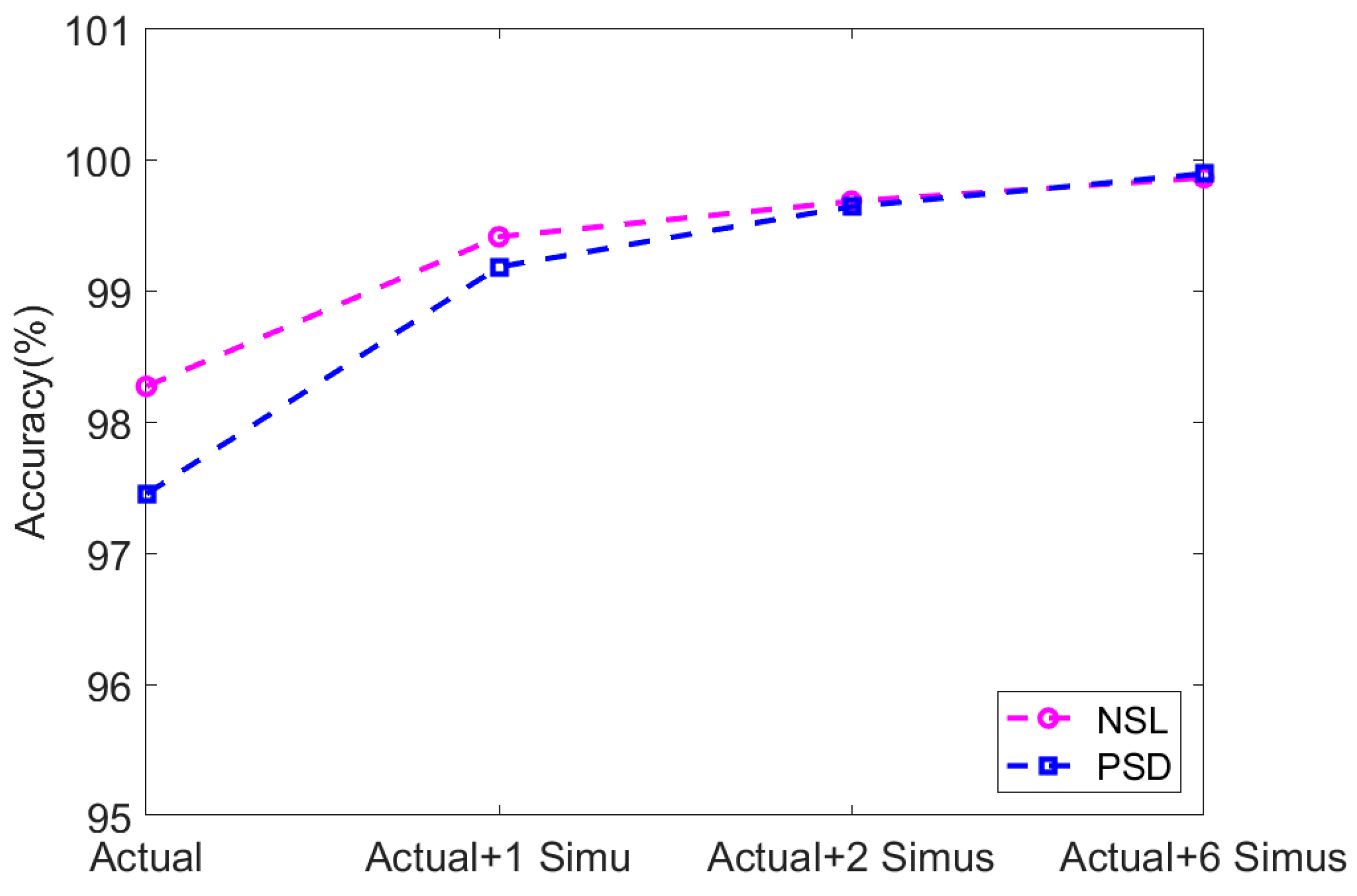
- classification performance enhancement by combing a generation model and a CNN-based classification model. While augmenting the measured data with simulated data six times as large, it increases the classification accuracy by 1.59% and 2.44% when the NSL and PSD are used as the input features, respectively.
2. Related Work
2.1. Underwater Acoustics Related
2.2. Underwater Noise Classification
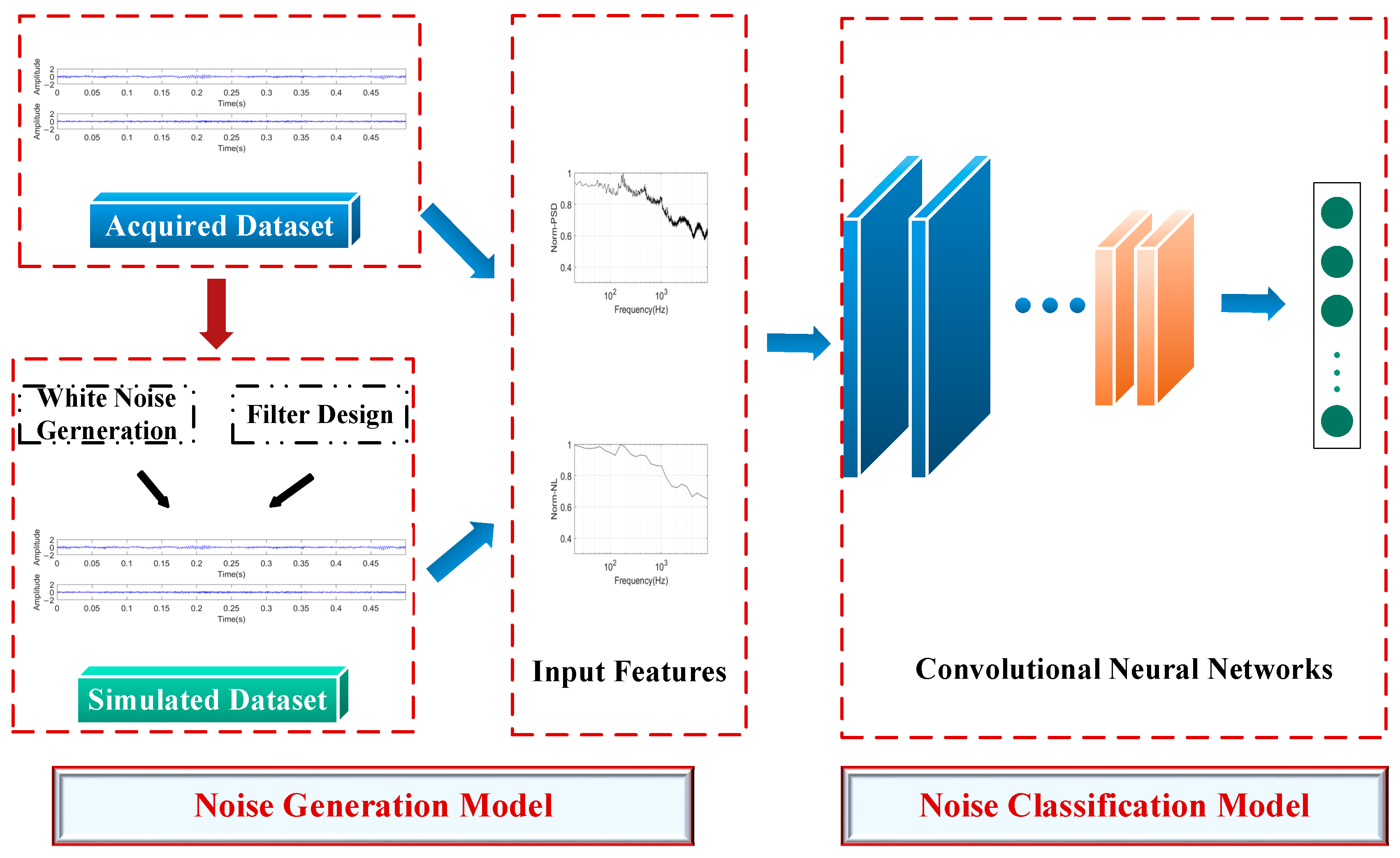
3. Methodology
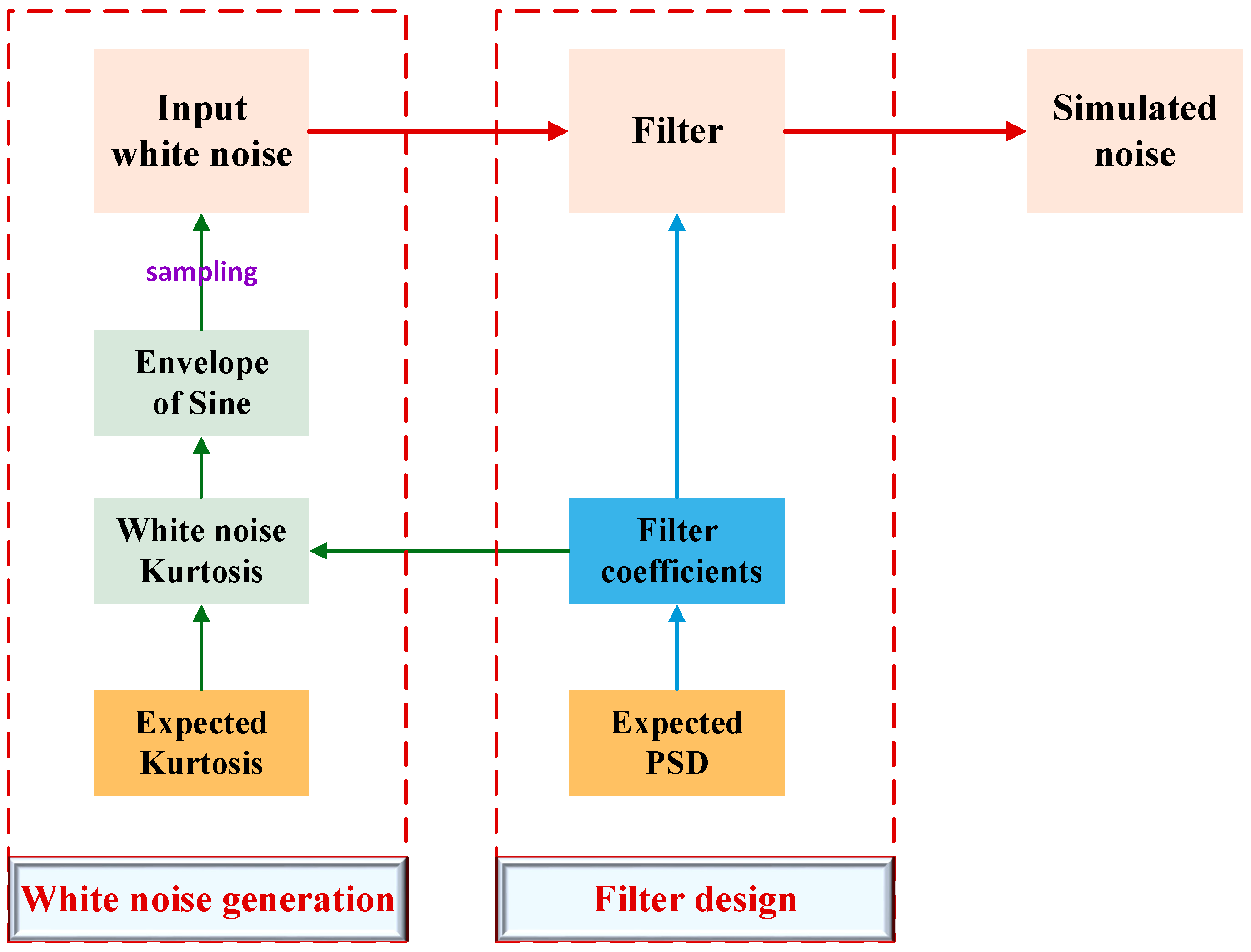
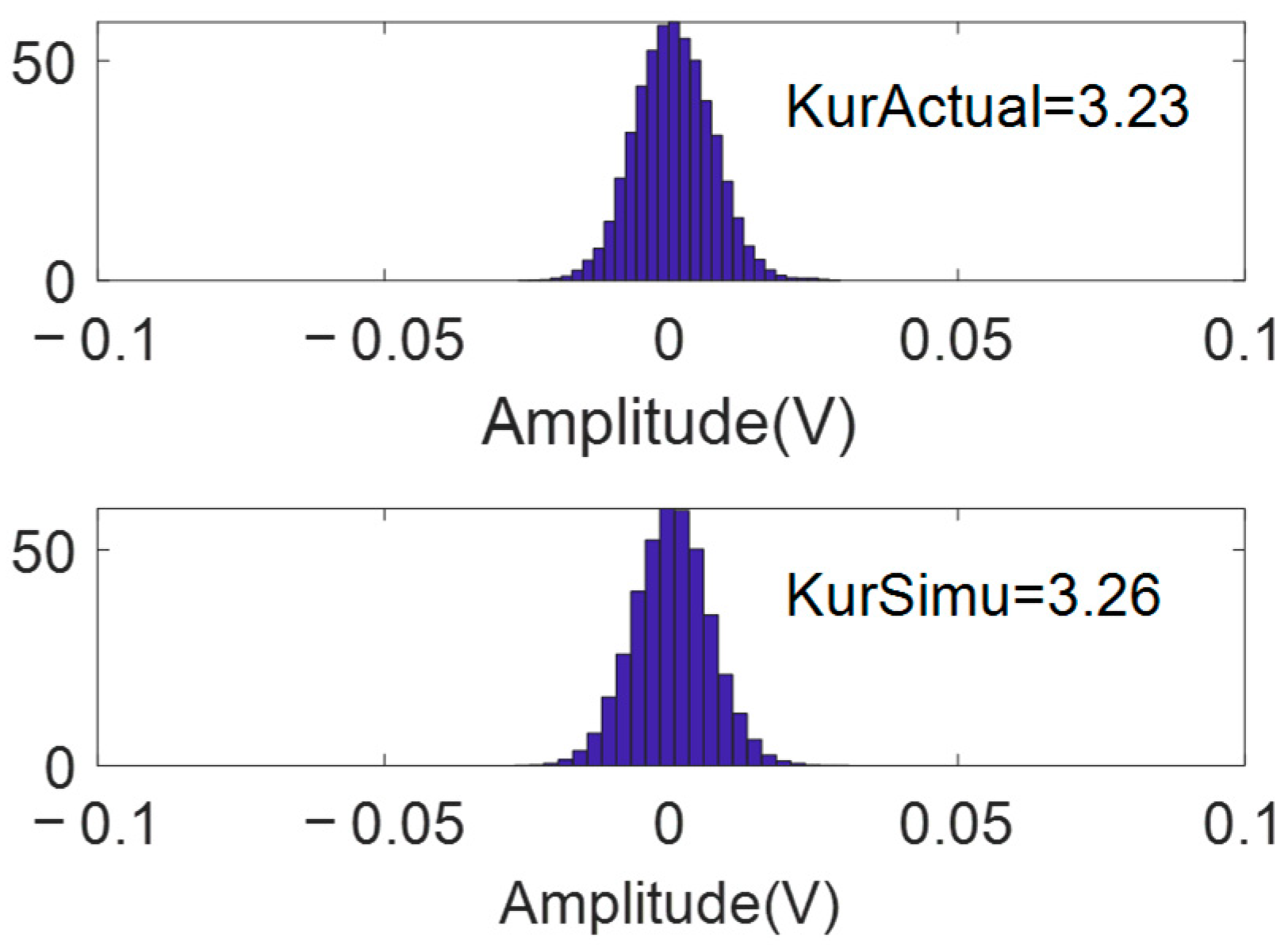
3.1. Underwater Noise Generation Model
3.2. Underwater Noise Classification Model
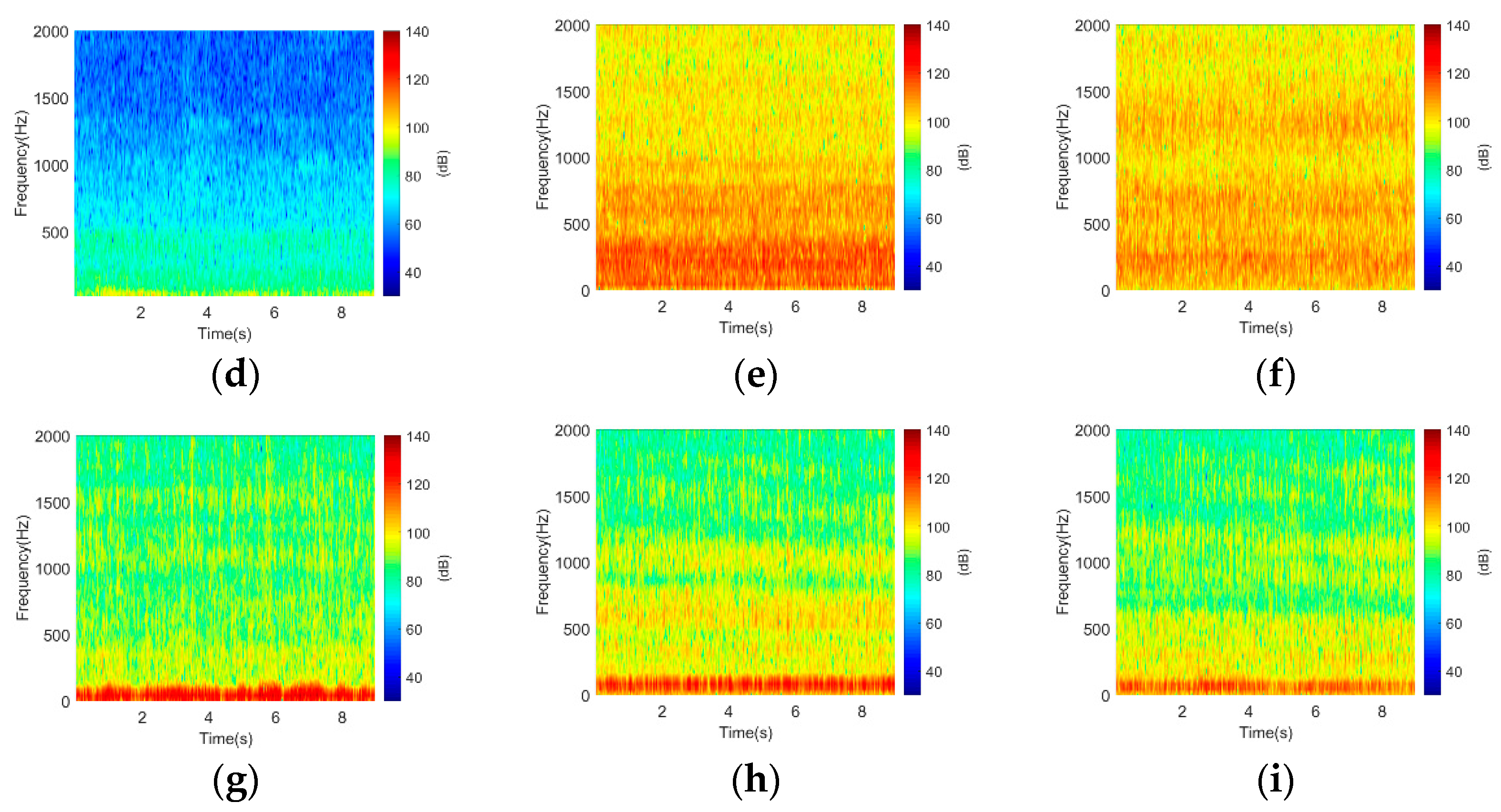
3.2.1. Underwater Noise Features Extraction
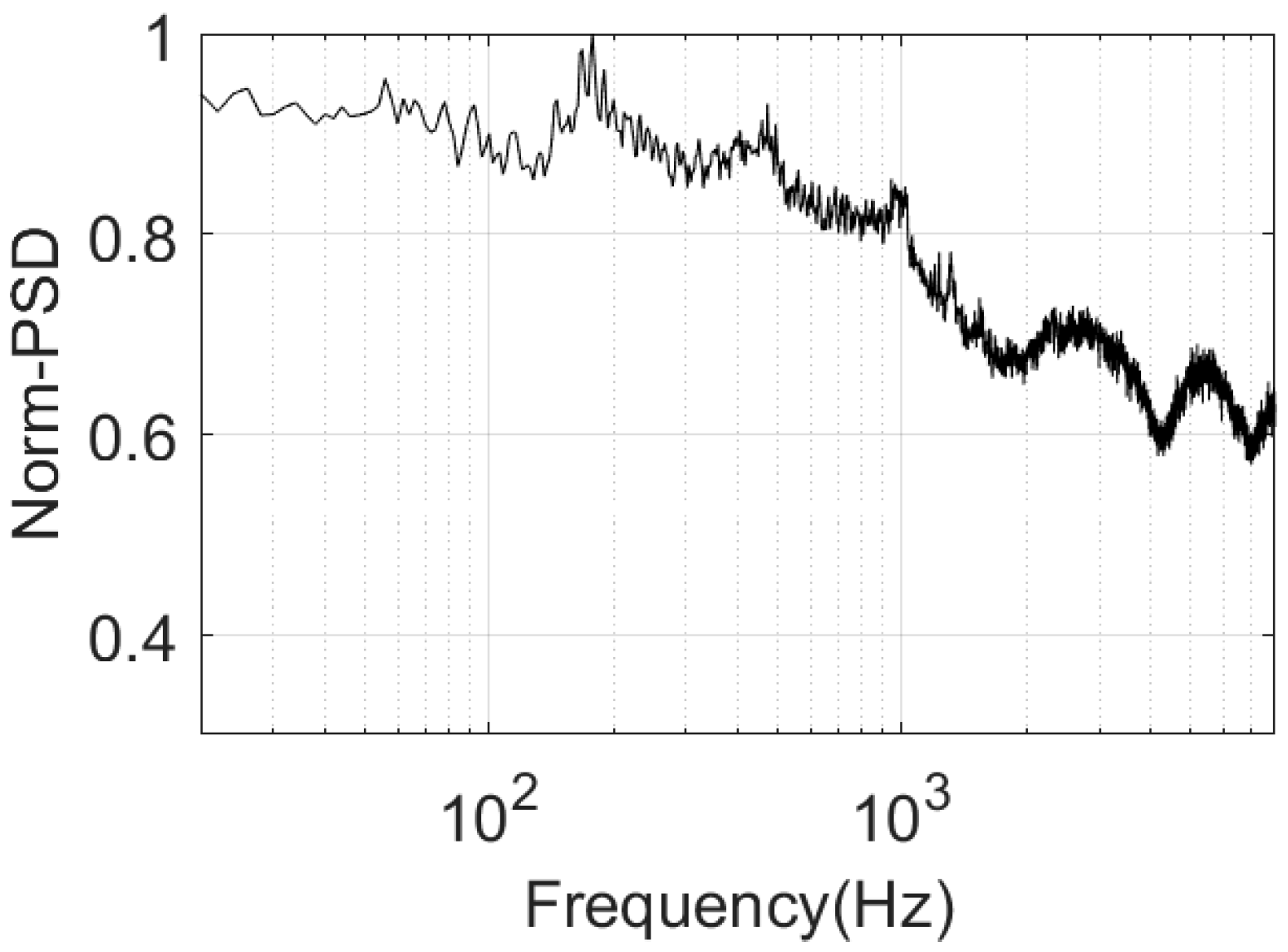
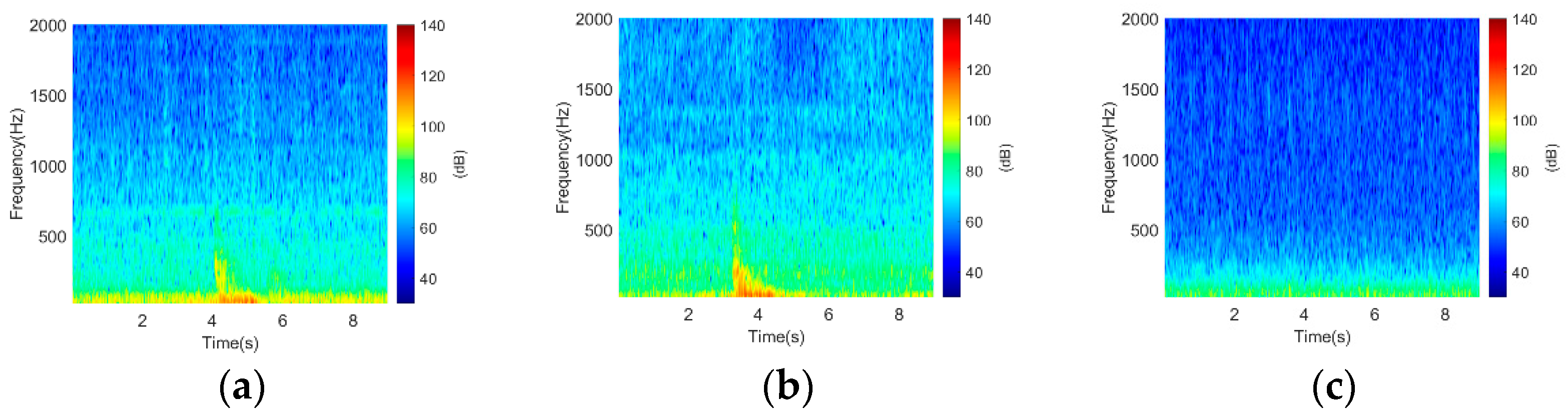
- PSD.
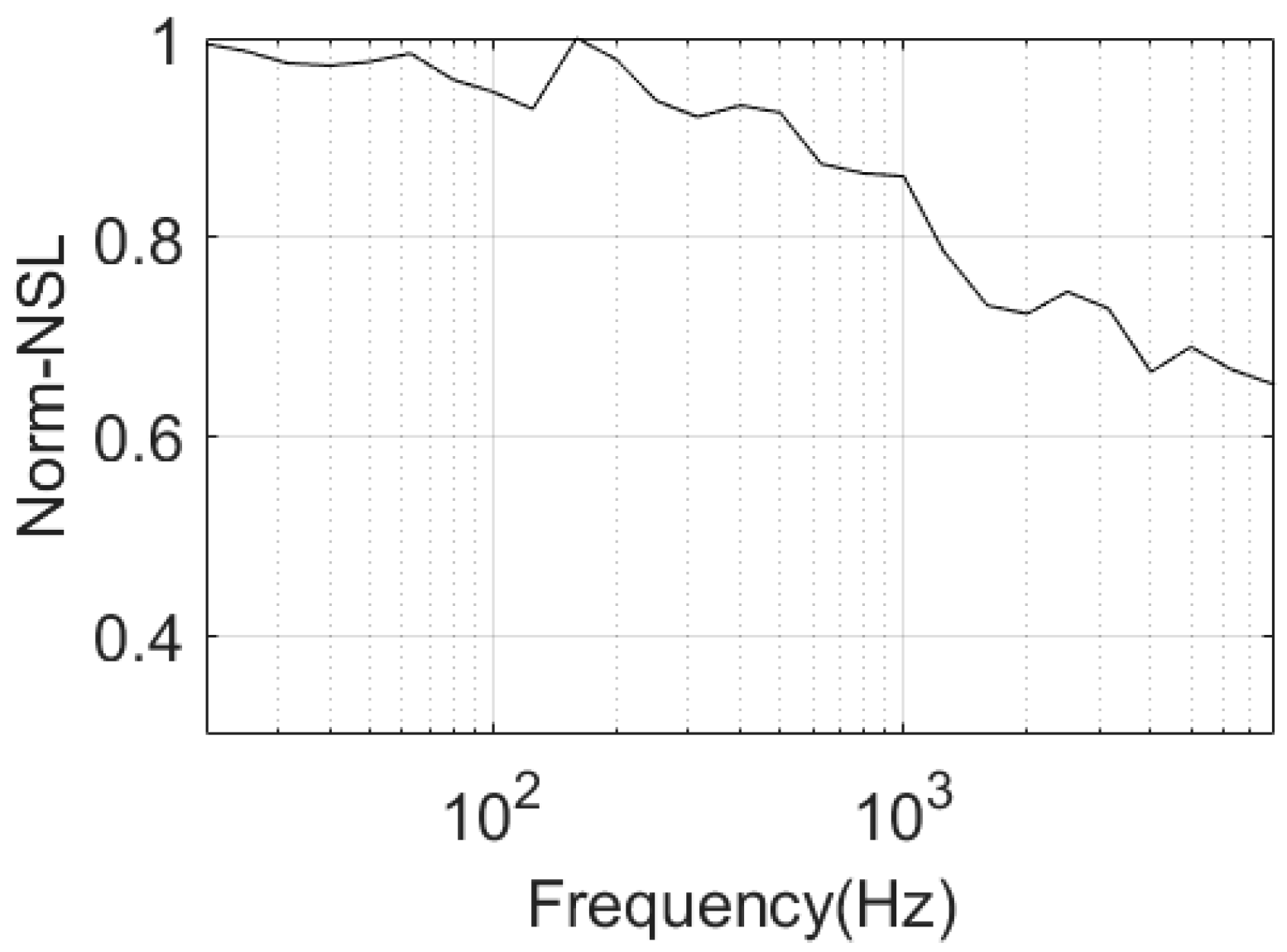
- 1/3 octave noise spectrum level (NSL).
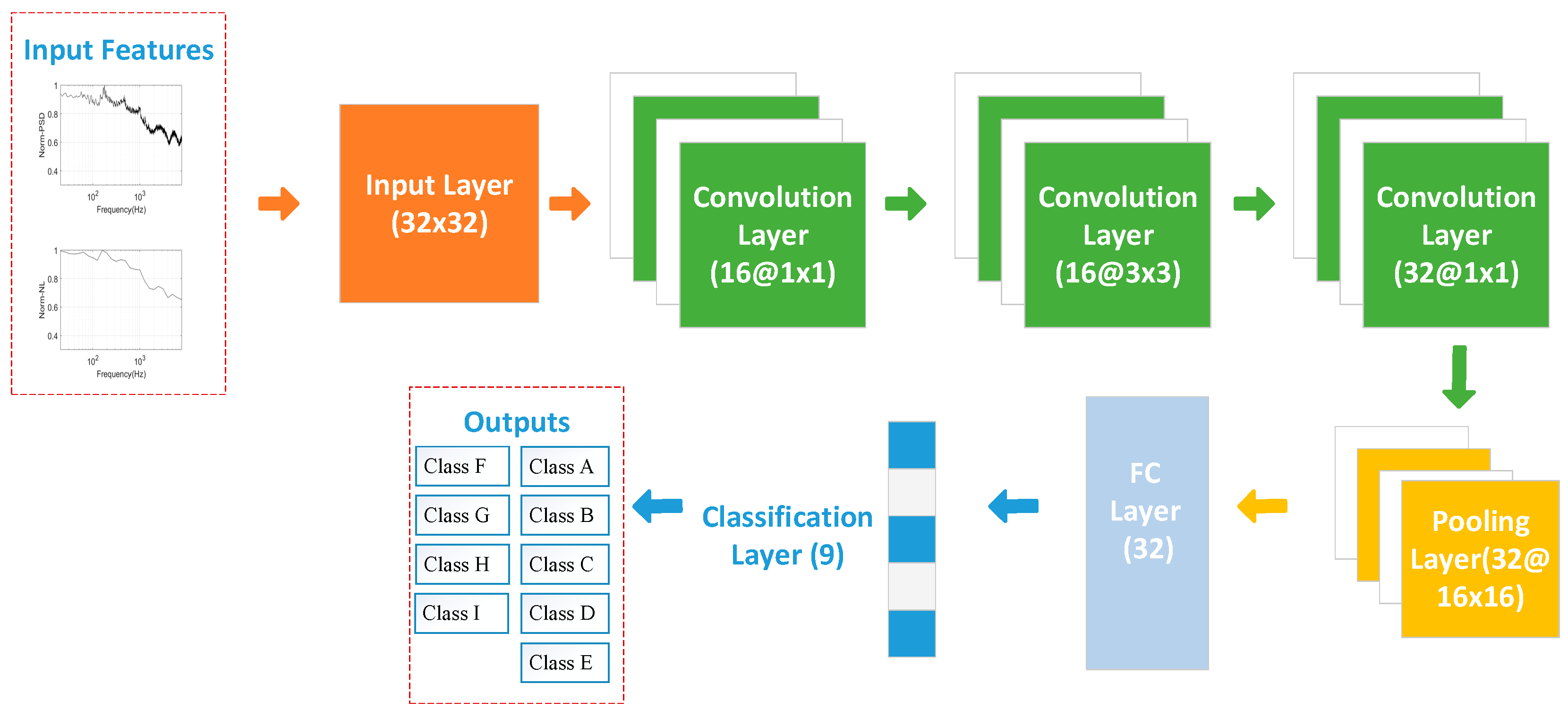
3.2.2. CNN Architecture Design
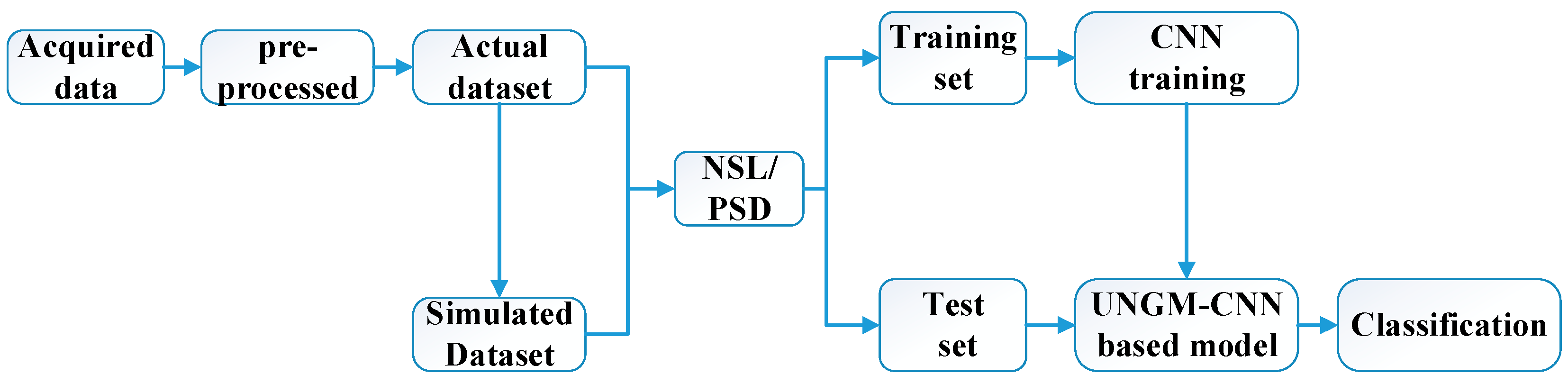
3.2.3. UNGM-CNN Based Classification Method
4. Experiments and Discussions
4.1. Experimental Data and Labeling Related Work
- A. Shallow sea experiment in the northern South China Sea (SCS).
- B. Deep sea experiment in the northern SCS.
- C. Experiment in the East China Sea (ECS).
4.2. Discussions
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Garcia-Garcia, A.; Orts-Escolano, S.; Oprea, S. A survey on deep learning techniques for image and video semantic segmentation. Appl. Soft Comput. 2018, 70, 41–65. [Google Scholar] [CrossRef]
- Li, X.; Long, S.; Zhu, J. Survey of few-shot learning based on deep neural network. Appl. Res. Comput. 2020, 37, 2241–2247. [Google Scholar]
- Liu, Y.; Lei, Y.; Fan, J.; Wang, F.; Gong, Y.; Tian, Q. Survey of few-shot learning based on deep neural network. Surv. Image Classif. Technol. Based Small Sample Learn. 2021, 47, 297–315. [Google Scholar]
- Zhang, R.; Che, T.; Ghahramani, Z. MetaGAN: An adversarial approach to few-shot learning. In Proceedings of the 32nd International Conference on Neural Information Processing Systems, Montreal, QC, Canada, 2–8 December 2018. [Google Scholar]
- Zhao, K.; Jin, X.; Wang, Y. Survey on few-shot learning. J. Softw. 2021, 32, 349–369. [Google Scholar]
- Dixit, M.; Kwitt, R.; Niethammer, M.; Vasconcelos, N. AGA: Attribute guided augmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7455–7463. [Google Scholar]
- Liu, B.; Wang, X.; Dixit, M.; Kwitt, R.; Vasconcelos, N. Feature space transfer for data augmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 9090–9098. [Google Scholar]
- Long, M.; Cao, Y.; Wang, J.; Jordan, M.I. Learning transferable features with deep adaptation networks. In Proceedings of the 32nd International Conference on Machine Learning, Lille, France, 6–11 July 2015; pp. 97–105. [Google Scholar]
- Qi, H.; Brown, M.; Lowe, D.G. Low-shot learning with imprinted weights. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 5822–5830. [Google Scholar]
- Koch, G.; Zemel, R.; Salakhutdinov, R. Siamese neural networks for one-shot image recognition. In Proceedings of the 32nd International Conference on Machine Learning, Lille, France, 6–11 July 2015. [Google Scholar]
- Zhou, L.J.; Cui, P.; Yang, S.Q.; Zhu, W.W.; Tian, Q. Learning to learn image classifiers with informative visual analogy. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019. [Google Scholar]
- Ravi, S.; Larochelle, H. Optimization as a model for few-shot learning. In Proceedings of the ICLR—International Conference on Learning Representations, San Juan, Puerto Rico, 2–4 May 2016. [Google Scholar]
- Wang, X.; Yu, F.; Wang, R.; Darrell, T.; Gonzalez, J.E. TAFE-Net: Task-aware feature embeddings for low shot learning. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 1831–1840. [Google Scholar]
- Gidaris, S.; Komodakis, N. Dynamic few-shot visual learning without forgetting. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 4367–4375. [Google Scholar]
- Yang, H.; Li, J.; Shen, S.; Xu, G. A deep convolutional neural network inspired by auditory perception or underwater acoustic target recognition. Sensors 2019, 19, 1104. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ozanich, E.; Gerstoft, E.P.; Niu, H. A feedforward neural network for direction-of-arrival estimation. J. Acoust. Soc. Am. 2020, 147, 2035–2048. [Google Scholar] [CrossRef]
- Niu, H.; Gong, Z.; Ozanich, E.; Gerstoft, P.; Wang, H.; Li, Z. Deep learning source localization using multi-frequency magnitude-only data. J. Acoust. Soc. Am. 2019, 146, 211–222. [Google Scholar] [CrossRef] [Green Version]
- Van Komen, D.F.; Neilsen, T.B.K.; Howarth, K.; Knobles, D.P.; Dahl, P.H. Seabed and range estimation of impulsive time series using a convolutional neural network. J. Acoust. Soc. Am. 2020, 147, EL403–EL408. [Google Scholar] [CrossRef]
- Song, G.; Guo, X.; Wang, W.; Li, J.; Yang, H.; Ma, L. Underwater Noise Classification based on Support Vector Machine. In Proceedings of the IEEE/OES China Ocean Acoustics Conference COA 2021, Harbin, China, 14–17 July 2021. [Google Scholar]
- Lăzăroiu, G.; Andronie, M.; Iatagan, M.; Geamănu, M.; Ștefănescu, R.; Dijmărescu, I. Deep Learning-Assisted Smart Process Planning, Robotic Wireless Sensor Networks, and Geospatial Big Data Management Algorithms in the Internet of Manufacturing Things. ISPRS Int. J. Geo-Inf. 2022, 11, 277. [Google Scholar] [CrossRef]
- Blake, R.; Frajtova Michalikova, K. Deep Learning-based Sensing Technologies, Artificial Intelligence-based Decision-Making Algorithms, and Big Geospatial Data Analytics in Cognitive Internet of Things. Anal. Metaphys. 2021, 20, 159–173. [Google Scholar]
- Andronie, M.; Lăzăroiu, G.; Iatagan, M.; Hurloiu, I.; Ștefănescu, R.; Dijmărescu, A.; Dijmărescu, I. Big Data Management Algorithms, Deep Learning-Based Object Detection Technologies, and Geospatial Simulation and Sensor Fusion Tools in the Internet of Robotic Things. ISPRS Int. J. Geo-Inf. 2023, 12, 35. [Google Scholar] [CrossRef]
- Li, C.; Huang, Z.; Xu, J.; Guo, X.; Gong, Z.; Yan, Y. Multi-channel underwater target recognition using deep learning. Acta Acust. 2020, 45, 506–514. [Google Scholar]
- Wang, W.; Ni, H.; Su, L. Deep transfer learning for source ranging: Deep-sea experiment results. J. Acoust. Soc. Am. 2019, 146, EL317–EL322. [Google Scholar] [CrossRef] [Green Version]
- Escobar-Amado, C.D.; Badiey, M.; Pecknold, S. Automatic detection and classification of bearded seal vocalizations in the northeastern Chukchi Sea using convolutional neural networks. J. Acoust. Soc. Am. 2022, 151, 299–309. [Google Scholar] [CrossRef]
- Zhong, M.; Castellote, M.; Dodhia, R. Beluga whale acoustic signal classification using deep learning neural network models. J. Acoust. Soc. Am. 2020, 147, 1834–1841. [Google Scholar] [CrossRef]
- Li, X.; Song, W.; Gao, D.; Gao, W.; Wang, H. Training a U-Net based on a random mode-coupling matrix model to recover acoustic interference striations. J. Acoust. Soc. Am. 2020, 147, EL362–EL369. [Google Scholar] [CrossRef] [Green Version]
- Ekpezu, A.O.; Wiafe, I.; Katsriku, F.; Yaokumah, W. Using deep learning for acoustic event classification: The case of natural disasters. J. Acoust. Soc. Am. 2021, 149, 2926–2935. [Google Scholar] [CrossRef]
- Escobar-Amado, C.D.; Neilsen, T.B.; Castro-Correa, J.A.; Van Komen, D.F.; Badiey, M.; Knobles, D.P.; Hodgkiss, W.S. Seabed classification from merchant ship-radiated noise using a physics-based ensemble of deep learning algorithms. J. Acoust. Soc. Am. 2021, 150, 1434–1447. [Google Scholar] [CrossRef] [PubMed]
- Zhong, M.; Maelle, T.; Trevor, A.B.; Kathleen, M.S.; Jean-Yves, R.; Rahul, D.; Juan, L.F. Detecting, classifying, and counting blue whale calls with Siamese neural network. J. Acoust. Soc. Am. 2021, 149, 3086–3094. [Google Scholar] [CrossRef]
- Wu, G.; Li, J.; Li, X.; Chen, Y.; Yuan, Y. Ship radiated-noise recognition (IV)-recognition using fuzzy neural network. Acta Acust. 1999, 24, 275–280. [Google Scholar]
- Wu, Y.; Yang, L. Ship image classification by combined use of HOG and SVM. J. Shanghai Ship Shipp. Res. Inst. 2019, 42, 58–64. [Google Scholar]
- Yang, K.; Zhou, X. Deep learning classification for improved bicoherence feature based on cyclic modulation and cross-correlation. J. Acoust. Soc. Am. 2019, 146, 2201–2211. [Google Scholar] [CrossRef]
- Premus, V.E.; Evans, M.E.; Abbot, P.A. Machine learning-based classification of recreational fishing vessel kinematics from broadband striation patterns. J. Acoust. Soc. Am. 2020, 147, EL184–EL188. [Google Scholar] [CrossRef] [Green Version]
- Song, G.; Guo, X.; Wang, W. A machine learning-based underwater noise classification method. Appl. Acoust. 2021, 184, 10833. [Google Scholar] [CrossRef]
- Mishachandar, B.; Vairamuthua, S. Diverse ocean noise classification using deep learning. Appl. Acoust. 2021, 181, 108141. [Google Scholar] [CrossRef]
- Webster, R.J. A random number generator for ocean noise statistics. IEEE J. Ocean. Eng. 1994, 19, 134–137. [Google Scholar] [CrossRef]
- Webster, R.J. Ambient noise statistics. IEEE Trans. Signal Pro. 1993, 41, 2249–2253. [Google Scholar] [CrossRef]
- Dolan, B.A. The Mellin transform for moment generation and for the probability density of products and quotients of random variables. Proc. IEEE 1964, 52, 1745–1746. [Google Scholar] [CrossRef]
- Song, G.; Guo, X.; Ma, L.; Li, H. Non-Gaussian Ocean Ambient Noise Model with Certain Kurtosis. Chin. J. Acoust. 2020, 39, 498–511. [Google Scholar]
- Neilsen, T.B.; Escobar-Amado, C.D.; Acree, M.C.; Hodgkiss, W.S.; Van Komen, D.F.; Knobles, D.P.; Badiey, M. Learning location and seabed type from a moving mid-frequency source. J. Acoust. Soc. Am. 2021, 149, 692–705. [Google Scholar] [CrossRef] [PubMed]
- Frederick, C.; Villar, S.; Michalopoulou, Z.H. Seabed classification using physics-based modeling and machine learning. J. Acoust. Soc. Am. 2020, 148, 859–872. [Google Scholar] [CrossRef] [PubMed]
- Bianco, M.J.; Gerstoft, P.; Traer, J.; Ozanich, E.; Roch, M.A.; Gannot, S.; Deledalle, C.A. Machine learning in acoustics: Theory and applications. J. Acoust. Soc. Am. 2019, 146, 3590–3628. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nair, V.; Hinton, G.E. Rectified Linear Units Improve Restricted Boltzmann Machines. In Proceedings of the 27th International Conference on Machine Learning (ICML-10), Haifa, Israel, 21–24 June 2010. [Google Scholar]
- Ioffe, S.; Szegedy, C. Batch normalization: Accelerating deep network training by reducing internal covariate shift. In Proceedings of the 32nd International Conference on Machine Learning, Lille, France, 6–11 July 2015. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Method | Noise Type | Sample Size | Accuracy |
|---|---|---|---|---|
| [31] | Fuzzy neural network (FNN) | 41 ships | 1049 | 92.9% |
| [32] | Support vector machine (SVM) | 5 ships | 983 | 84.14% |
| [33] | SVM, random forest (RF), deep belief network (DBN) | 4 ships + 1 drag source | 30,000 | 91.2% |
| [34] | CNN | 4 ships (trained on three vessels and applied to a fourth, to determine whether the vessel was opening or closing) | -- | 89.6% |
| [35] | CNN | 5 ships | 7225 | 98.95% (SNR = −10 dB) |
| [36] | CNN | Cetaceans, fishes, marine invertebrates, anthropogenic sounds, natural sounds, and the unidentified ocean sounds | 560, then augment to 205,618 | 96.01% |
| Dataset Name | Details of Dataset |
|---|---|
| Actual | Measured data |
| Simu | Simulated data yielded by one simulation process |
| Actual + 1 Simu | Measured data + simulated data yielded by one simulation process |
| Actual + 2 Simus | Measured data + simulated data yielded by two simulation processes |
| Actual + 6 Simus | Measured data + simulated data yielded by six simulation processes |
| Main Noise Source | Air-Gun Noise | Mixed Air-Gun and Vessel Noise | Ambient Noise | KeDiao Vessel | Fishing Vessel A | Fishing Vessel B | Fishing Vessel C | Fishing Vessel D | Fishing Vessel E |
|---|---|---|---|---|---|---|---|---|---|
| label | AirGun | AirKeD | AmbNoi | KeDiao | FisherA | FisherB | FisherC | FisherD | FisherE |
| sample size | 200 | 300 | 210 | 300 | 200 | 300 | 300 | 200 | 190 |
| Dataset Name | Dataset Size | Training Dataset | Test Dataset |
|---|---|---|---|
| Actual | 2200 | 1760 | 440 |
| Simu | 2200 | -- | -- |
| Actual + 1 Simu | 4400 (2200 + 2200) | 3520 | 880 |
| Actual + 2 Simus | 6600 (2200 + 2200 × 2) | 5280 | 1320 |
| Actual + 6 Simus | 15,400 (2200 + 2200 × 6) | 12,320 | 3080 |
| K-Fold | AirGun | AirKeD | AmbNoi | KeDiao | FisherA | FisherB | FisherC | FisherD | FisherE | Total |
|---|---|---|---|---|---|---|---|---|---|---|
| K = 1 | 41 | 44 | 33 | 65 | 51 | 70 | 52 | 42 | 42 | 440 |
| K = 2 | 37 | 70 | 46 | 56 | 39 | 68 | 57 | 32 | 35 | 440 |
| K = 3 | 40 | 63 | 43 | 55 | 38 | 62 | 59 | 49 | 31 | 440 |
| K = 4 | 44 | 60 | 40 | 52 | 41 | 73 | 56 | 37 | 37 | 440 |
| K = 5 | 38 | 69 | 49 | 59 | 34 | 44 | 65 | 41 | 41 | 440 |
| Predicted Class | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| AirGun | AirKeD | AmbNoi | KeDiao | FisherA | FisherB | FisherC | FisherD | FisherE | Recall | ||
| True Class | AirGun | 39 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 95.12% |
| AirKeD | 1 | 43 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 97.73% | |
| AmbNoi | 0 | 0 | 33 | 0 | 0 | 0 | 0 | 0 | 0 | 100% | |
| KeDiao | 0 | 2 | 0 | 63 | 0 | 0 | 0 | 0 | 0 | 96.92% | |
| FisherA | 0 | 0 | 0 | 0 | 51 | 0 | 0 | 0 | 0 | 100% | |
| FisherB | 0 | 0 | 0 | 0 | 0 | 70 | 0 | 0 | 0 | 100% | |
| FisherC | 0 | 0 | 0 | 0 | 0 | 0 | 52 | 0 | 0 | 100% | |
| FisherD | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 42 | 0 | 100% | |
| FisherE | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 42 | 95.12% | |
| Precision | 97.50% | 93.48% | 100% | 98.44% | 100% | 100% | 100% | 100% | 100% | -- | |
| Predicted Class | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| AirGun | AirKeD | AmbNoi | KeDiao | FisherA | FisherB | FisherC | FisherD | FisherE | Recall | ||
| True Class | AirGun | 288 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 100% |
| AirKeD | 1 | 412 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 99.52% | |
| AmbNoi | 0 | 0 | 310 | 0 | 0 | 0 | 0 | 0 | 0 | 100% | |
| KeDiao | 0 | 0 | 0 | 411 | 0 | 0 | 0 | 0 | 1 | 99.76% | |
| FisherA | 0 | 0 | 0 | 0 | 270 | 2 | 0 | 0 | 0 | 99.26% | |
| FisherB | 0 | 0 | 0 | 0 | 0 | 405 | 0 | 0 | 0 | 100% | |
| FisherC | 0 | 1 | 0 | 0 | 0 | 0 | 417 | 0 | 0 | 99.76% | |
| FisherD | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 282 | 2 | 99.30% | |
| FisherE | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 276 | 99.64% | |
| Precision | 99.65% | 99.76% | 100% | 99.76% | 100% | 99.51% | 100% | 99.65% | 98.92% | -- | |
| CNN-Based Method | UNGM-CNN-Based Method | |
|---|---|---|
| Micro-precision | 98.82% | 99.69% |
| Micro-recall | 98.86% | 99.69% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, G.; Guo, X.; Zhang, Q.; Li, J.; Ma, L. Underwater Noise Modeling and Its Application in Noise Classification with Small-Sized Samples. Electronics 2023, 12, 2669. https://doi.org/10.3390/electronics12122669
Song G, Guo X, Zhang Q, Li J, Ma L. Underwater Noise Modeling and Its Application in Noise Classification with Small-Sized Samples. Electronics. 2023; 12(12):2669. https://doi.org/10.3390/electronics12122669
Chicago/Turabian StyleSong, Guoli, Xinyi Guo, Qianchu Zhang, Jun Li, and Li Ma. 2023. "Underwater Noise Modeling and Its Application in Noise Classification with Small-Sized Samples" Electronics 12, no. 12: 2669. https://doi.org/10.3390/electronics12122669