

Self-Calibration for Sparse Uniform Linear Arrays with Unknown Direction-Dependent Sensor Phase by Deploying an Individual Standard Sensor

Abstract
:1. Introduction
2. Model Establishment
2.1. Sensor Phase Models
2.2. Signal Model
3. Proposed Method
3.1. Robust DOA Estimation without Spatial Aliasing
3.2. DD Sensor Phase Calibration
3.2.1. Steering Matrix Estimation
3.2.2. Sensor Phase Estimation
3.2.3. Permutation Problem Solving
3.3. Algorithmic Steps
3.4. Discussions
3.4.1. Discussion on the Deployed Standard Sensors
3.4.2. Comparison with the Current Self-Calibration Algorithms
4. Simulation Results
4.1. Example for DOAs and DD Sensor Phase Estimation
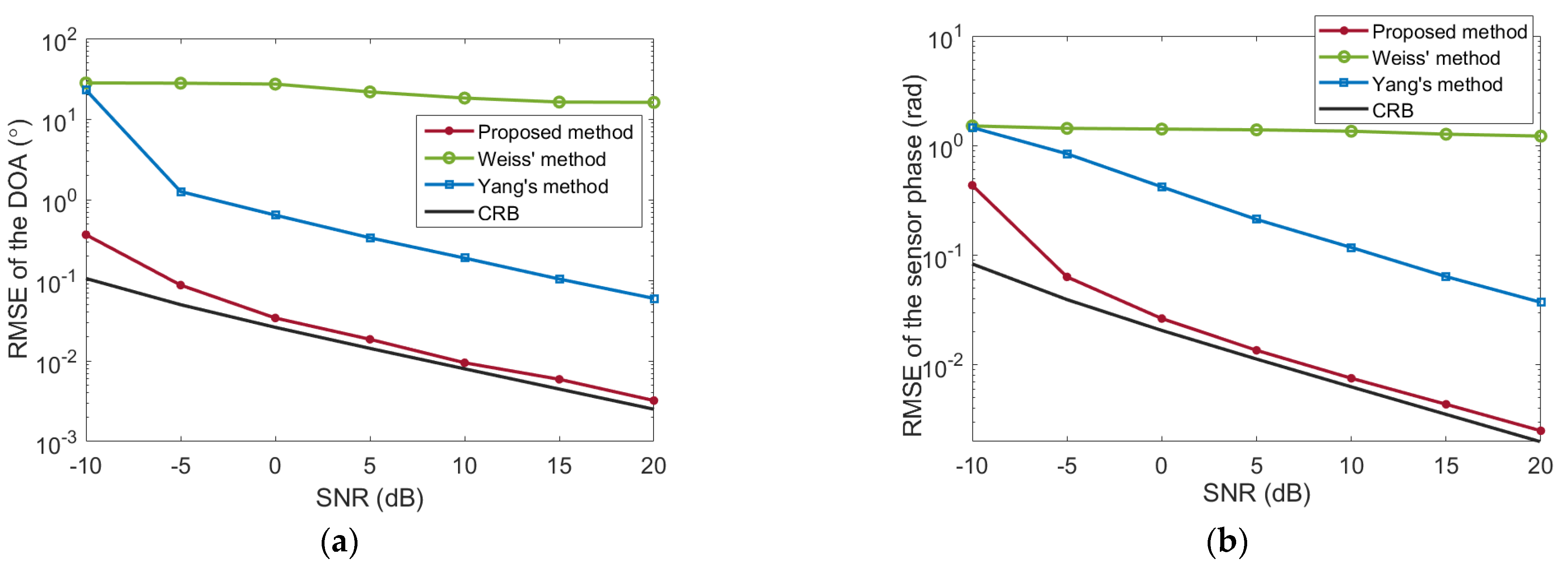
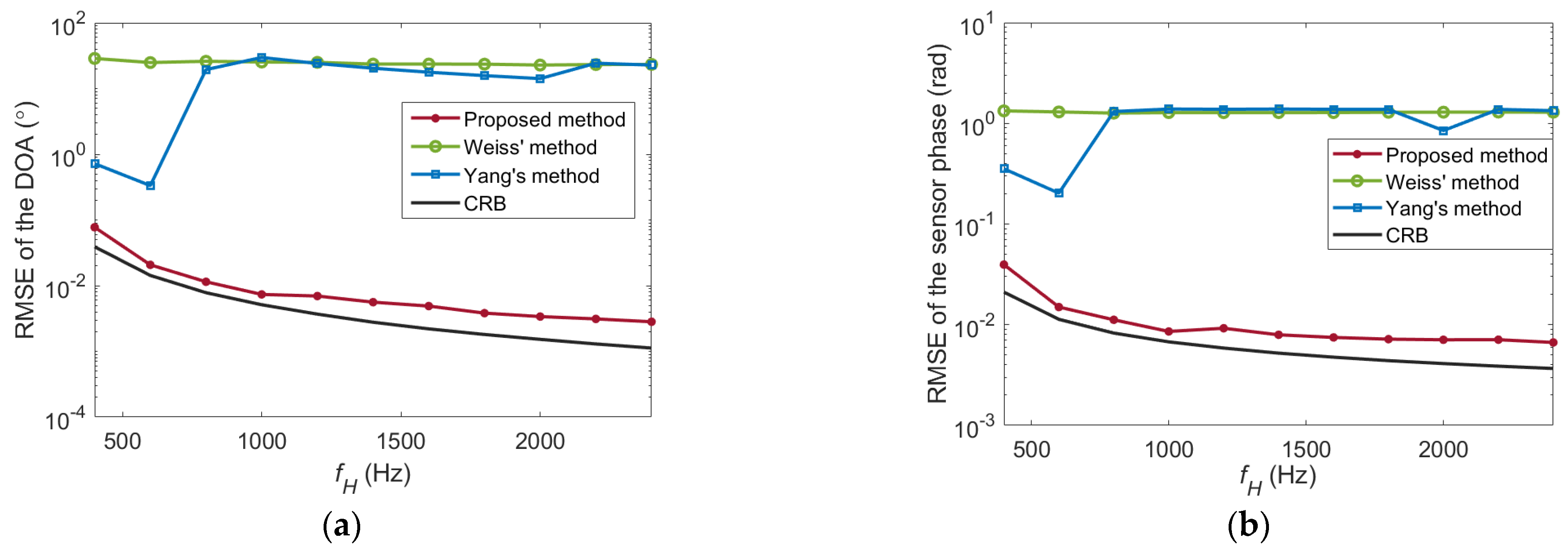
4.2. Statistical Performance of the Proposed Algorithm
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, S.; Ren, S.; Li, X.; Wang, G.; Wang, W. A New Sparse Optimal Array Design Based on Extended Nested Model for High-Resolution DOA Estimation. Electronics 2022, 11, 3334. [Google Scholar] [CrossRef]
- Jie, X.; Zheng, B.; Gu, B. Gain and Phase Calibration of Uniform Rectangular Arrays Based on Convex Optimization and Neural Networks. Electronics 2022, 11, 718. [Google Scholar] [CrossRef]
- Jian, L.; Stoica, P.; Wang, Z. On robust Capon beamforming and diagonal loading. IEEE Trans. Signal Process. 2003, 51, 1702–1715. [Google Scholar]
- Walt, K.; Scott, W.; Chuck, K. Op Amp Applications Handbook; Newnes: London, UK, 2005. [Google Scholar]
- Bao, X.; Zhou, Z.; Wang, Y. Review: Distributed time-domain sensors based on Brillouin scattering and FWM enhanced SBS for temperature, strain and acoustic wave detection. PhotoniX 2021, 2, 1–29. [Google Scholar]
- Niu, T.; Mei, Z.; Cui, T.J. Radar Antennas; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2016. [Google Scholar]
- Fabrizio, S.; Alberto, S. A novel online mutual coupling compensation algorithm for uniform and linear arrays. IEEE Trans. Signal Process. 2007, 55, 560–573. [Google Scholar]
- Liao, B.; Zhang, Z.G.; Chan, S.C. DOA estimation and tracking of ULAs with mutual coupling. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 891–905. [Google Scholar] [CrossRef] [Green Version]
- Astély, D.; Swindlehurst, A.L.; Ottersten, B. Spatial signature estimation for uniform linear arrays with unknown receiver gains and phase. IEEE Trans. Signal Process. 1999, 47, 2128–2138. [Google Scholar] [CrossRef] [Green Version]
- Rabiner, L.; Schafer, R. Theory and Applications of Digital Speech Processing; Prentice Hall Press: Hoboken, NJ, USA, 2010. [Google Scholar]
- Mckenna, M.F.; Ross, D.; Wiggins, S.M.; Hildebrand, J.A. Underwater radiated noise from modern commercial ships. J. Acoust. Soc. Am. 2012, 131, 92–103. [Google Scholar] [CrossRef] [Green Version]
- Weiss, A.J.; Friedlander, B. Eigenstructure methods for direction finding with sensor gain and phase uncertainties. Circuits Syst. Signal Process. 1990, 9, 271–300. [Google Scholar] [CrossRef]
- Yang, L.; Yang, Y.; Liao, G.; Wang, Y. Robust direction-finding method for sensor gain and phase uncertainties in non-uniform environment. Circuits Syst. Signal Process. 2020, 39, 1943–1964. [Google Scholar] [CrossRef]
- Zhang, M.; Zhu, Z. A method for direction finding under sensor gain and phase uncertainties. IEEE Trans. Antennas Propag. 1995, 43, 880–883. [Google Scholar] [CrossRef]
- Wu, G.; Zhang, M.; Guo, F. Self-Calibration Direct Position Determination Using a Single Moving Array with Sensor Gain and Phase Errors. Signal Process. 2020, 173, 107587. [Google Scholar] [CrossRef]
- Liu, A.; Liao, G. An eigenvector based method for estimating DOA and sensor gain-phase errors. Digit. Signal Process. 2018, 79, 116–124. [Google Scholar] [CrossRef]
- Dai, Z.; Su, W.; Gu, H.; Li, W. Sensor Gain-Phase Errors Estimation Using Disjoint Sources in Unknown Directions. IEEE Sens. J. 2016, 16, 3724–3730. [Google Scholar] [CrossRef]
- He, J.; Shu, T.; Li, L.; Truong, T.K. Mixed Near-Field and Far-Field Localization and Array Calibration with Partly Calibrated Arrays. IEEE Trans. Signal Process. 2022, 70, 2105–2118. [Google Scholar] [CrossRef]
- Liao, B.; Chan, S.C. Direction finding with partly calibrated uniform linear arrays. IEEE Trans. Antennas Propag. 2012, 60, 922–929. [Google Scholar] [CrossRef] [Green Version]
- Liao, B.; Chan, S.C. Direction finding in partly calibrated uniform linear arrays with unknown gains and phases. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 217–227. [Google Scholar] [CrossRef]
- Liao, B.; Wen, J.; Huang, L.; Guo, C.; Chan, S.C. Direction finding with partly calibrated uniform linear arrays in nonuniform noise. IEEE Sens. J. 2016, 16, 4882–4890. [Google Scholar] [CrossRef]
- Wylie, M.P.; Roy, S.; Messer, H. Joint DOA estimation and phase calibration of linear equispaced (LES) arrays. IEEE Trans. Signal Process. 1994, 42, 3449–3459. [Google Scholar] [CrossRef]
- Zhang, X.; He, Z.; Zhang, X.; Yang, Y. DOA and Phase Error Estimation for a Partly Calibrated Array with Arbitrary Geometry. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 497–511. [Google Scholar] [CrossRef]
- Wijnholds, S.J.; Alle-Jan, V.D.V. Multisource Self-Calibration for Sensor Arrays. IEEE Trans. Signal Process. 2009, 57, 3512–3522. [Google Scholar] [CrossRef] [Green Version]
- Weiss, A.J.; Friedlander, B. DOA and steering vector estimation using a partially calibrated array. IEEE Trans. Aerosp. Electron. Syst. 1996, 32, 1047–1057. [Google Scholar] [CrossRef]
- Wang, B.; Wang, Y.; Chen, H. Array calibration of angularly dependent gain and phase uncertainties with instrumental sensors. In Proceedings of the IEEE International Symposium on Phased Array Systems & Technology, Boston, MA, USA, 14–17 October 2003; pp. 924–927. [Google Scholar]
- Yang, L.; Yang, Y.; Liao, G.; Guo, X. Joint calibration of array shape and sensor gain/phase for highly deformed arrays using wideband signals. Signal Process. 2019, 165, 222–232. [Google Scholar] [CrossRef]
- Van Trees, H.L. Optimum Array Processing; John Wiley & Sons: Hoboken, NJ, USA, 2002. [Google Scholar]
- Dmochowski, J.; Benesty, J.; Affès, S. On spatial aliasing in microphone arrays. IEEE Trans. Signal Process. 2009, 57, 1383–1395. [Google Scholar] [CrossRef]
- Wong, K.T.; Zoltowski, M.D. Direction-finding with sparse rectangular dual-size spatial invariance array. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 1320–1335. [Google Scholar] [CrossRef]
- Shin, J.W.; Lee, Y.J.; Kim, H.N. Reduced-complexity maximum likelihood direction-of-arrival estimation based on spatial aliasing. IEEE Trans. Signal Process. 2014, 62, 6568–6581. [Google Scholar] [CrossRef]
- Reddy, V.V.; Khong, A.W.H.; Ng, B.P. Unambiguous speech DOA estimation under spatial aliasing conditions. IEEE/ACM Trans. Audio, Speech Lang. Process. 2014, 22, 2133–2145. [Google Scholar] [CrossRef]
- Santori, A.; Barrere, J.; Chabriel, G.; Jauffret, C.; Medynski, D. Sensor self-localization for antenna arrays subject to bending and vibrations. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 884–898. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm: Self-calibration for sparse ULAs with unknown DD sensor phase | |
| Input: Phase parameters of the standard sensor, observations of the sparse ULA and the individual standard sensor Output: Estimated DOAs and the DD sensor phase responses of the sparse ULA | |
| 1: | is obtained by the Q-point FFTs on the L sections of the array observations. |
| 2: | The sample covariance matrix is calculated in (4). |
| 3: | Noise power is calculated by averaging the small eigenvalues of the sample covariance matrix . |
| 4: | // Step 1 Estimate the DOAs |
| 5: | Calculate the equivalent covariance matrix in (8). |
| 6: | The DOA for the frequency pairs of and is estimated in (9). |
| 7: | The broadband spatial spectrum is calculated in (10). |
| 8: | // Step 2 Estimate the DD sensor phase |
| 9: | The steering matrix is estimated in (16) and the selection matrix is calculated in (21). |
| 10: | The sensor phase is estimated in (20) and the selection matrix is calculated in (22). |
| DOAs | m | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|---|
| 50° | (rad) | 0.0000 | −1.2865 | 0.8886 | 0.8369 | −1.5832 | 1.5472 |
| 80° | (rad) | 0.0000 | −0.8488 | 2.0270 | −1.1582 | 0.0490 | −0.2114 |
| m | 7 | 8 | 9 | 10 | 11 | 12 | |
| 50° | (rad) | 2.2316 | 0.9938 | 1.2671 | 0.4506 | 1.8271 | 0.4833 |
| 80° | (rad) | 1.9140 | 0.5766 | −1.4600 | 0.0922 | 1.8587 | −2.1943 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, L.; Hou, X.; Yang, Y. Self-Calibration for Sparse Uniform Linear Arrays with Unknown Direction-Dependent Sensor Phase by Deploying an Individual Standard Sensor. Electronics 2023, 12, 60. https://doi.org/10.3390/electronics12010060
Yang L, Hou X, Yang Y. Self-Calibration for Sparse Uniform Linear Arrays with Unknown Direction-Dependent Sensor Phase by Deploying an Individual Standard Sensor. Electronics. 2023; 12(1):60. https://doi.org/10.3390/electronics12010060
Chicago/Turabian StyleYang, Long, Xianghao Hou, and Yixin Yang. 2023. "Self-Calibration for Sparse Uniform Linear Arrays with Unknown Direction-Dependent Sensor Phase by Deploying an Individual Standard Sensor" Electronics 12, no. 1: 60. https://doi.org/10.3390/electronics12010060