
Bounding the Upper Delays of the Tactile Internet Using Deterministic Network Calculus


Abstract
:1. Introduction
- We establish a network domain analytical model of Tactile Internet based on DNC and derive the delay bound of single-flow with single-switch, multi-flow with single-switch and multi-flow with multi-switch.
- We carry out extensive simulation experiments on measurement models for different network configurations, combine the theoretical model with the measurement model, verify the accuracy of the proposed analytical model, and compare it with existing CPA model.
- We perform numerical analysis of the model according to different parameters to evaluate the effect of the number of switches and traffic competition on Tactile Internet latency.
2. Related Works
3. Background
3.1. Description of the Tactile Internet Architecture
3.1.1. Master Domain
3.1.2. Network Domain
3.1.3. Slave Domain
3.2. Overview of DNC
3.2.1. Arrive Curve
3.2.2. Service Curve
3.2.3. Tandem Theorem
3.2.4. Delay Bound
3.3. Problem Description
4. Modeling Tactile Internet Using DNC
5. Determining Delay Bounds
5.1. Single Flow with Single Switch Performance Model
5.2. Multi-Flow with Single Switch Performance Model
5.3. Multi-Flow with Multi-Switch Performance Model
5.4. Tactile Internet Performance Model
6. Evaluation
6.1. Experimental Settings
6.2. Performance Validation
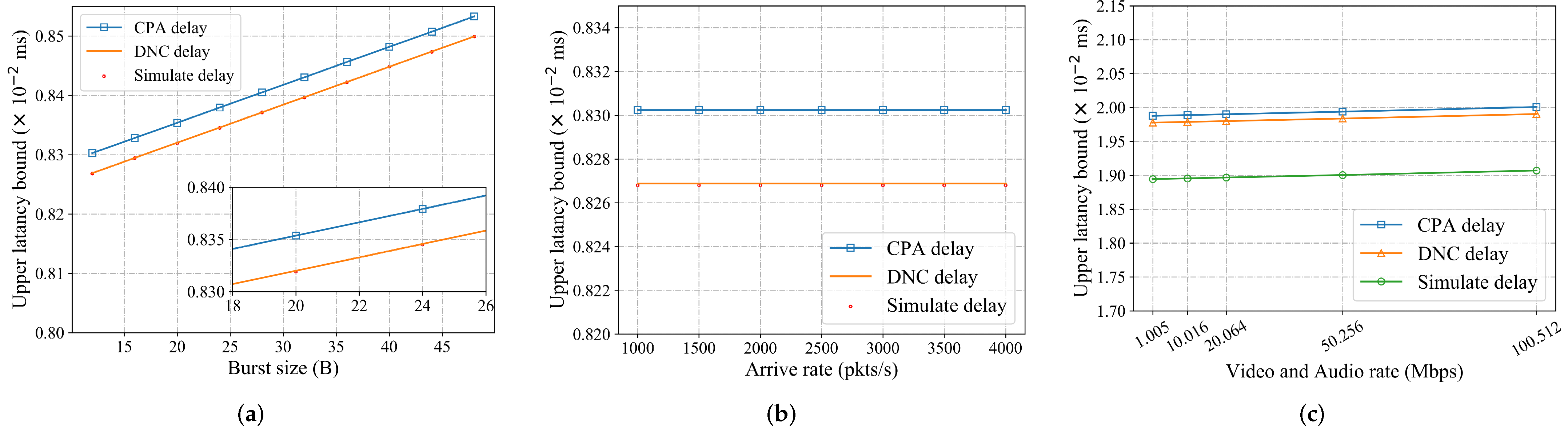
6.2.1. Single Flow with Single Switch
6.2.2. Multi-Flow with Single Switch
6.2.3. Single Flow with Multi-Switch
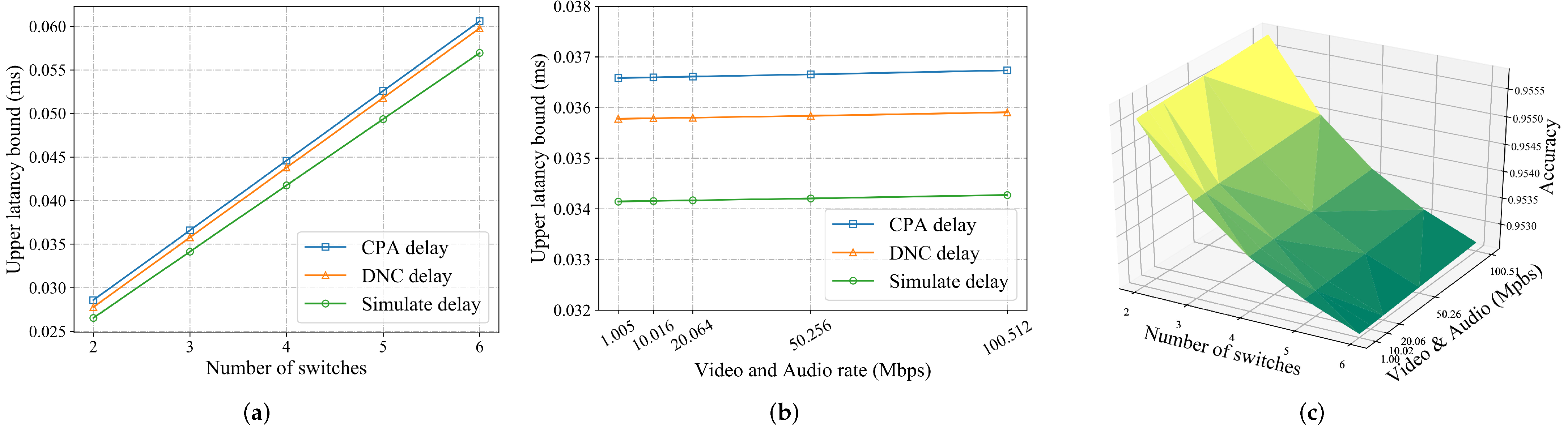
6.2.4. Multi-Flow with Multi-Switch
6.3. Performance Analysis
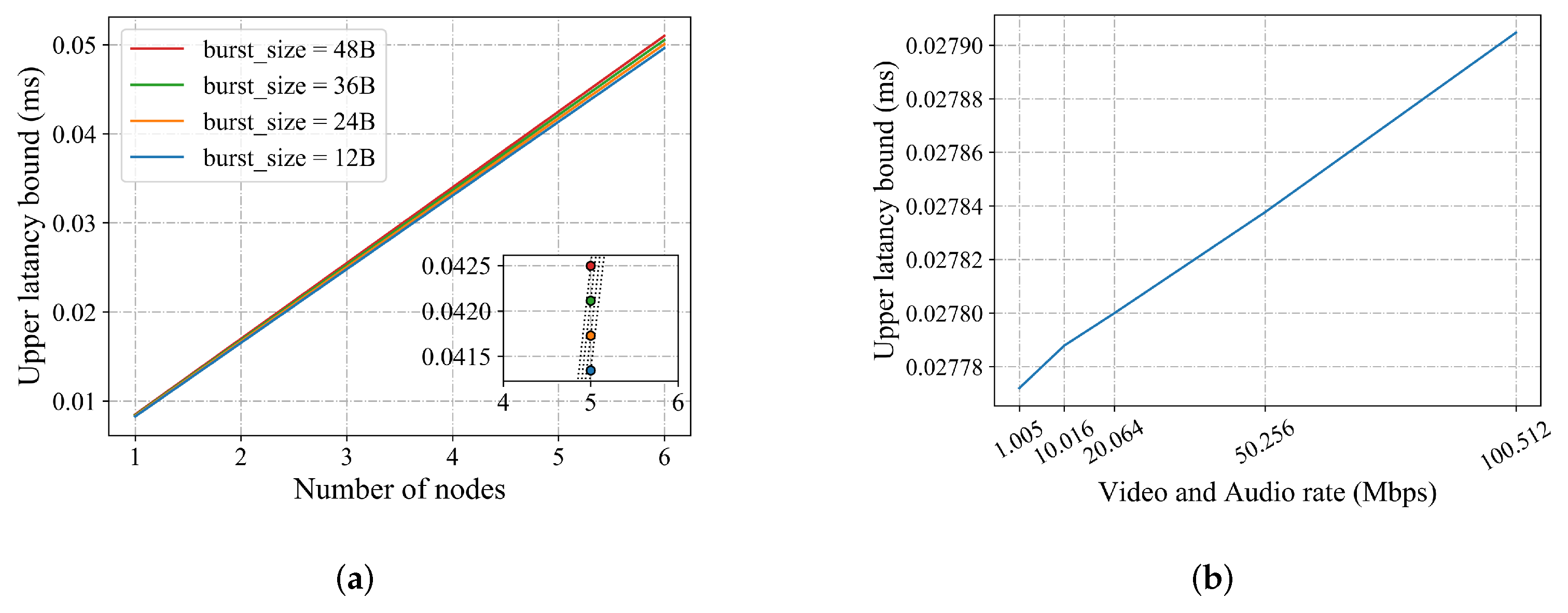
6.3.1. Effect of the Number of Tactile Internet Nodes on the Upper Bound of Delay
6.3.2. Effect of Interference Flow Properties on the Upper Bound of Delay
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fettweis, G.; Boche, H.; Wiegand, T.; Zielinski, E.; Schotten, H.; Merz, P.; Hirche, S.; Festag, A.; Hä ffner, W.; Meyer, M.; et al. The Tactile Internet—ITU-T Technology Watch Report. 2014. Available online: https://www.itu.int/dms_pub/itu-t/opb/gen/T-GEN-TWATCH-2014-1-PDF-E.pdf (accessed on 9 October 2022).
- Holland, O.; Steinbach, E.; Prasad, R.V.; Liu, Q.; Dawy, Z.; Aijaz, A.; Pappas, N.; Chandra, K.; Rao, V.S.; Oteafy, S.; et al. The IEEE 1918.1 “tactile internet” standards working group and its standards. Proc. IEEE 2019, 107, 256–279. [Google Scholar] [CrossRef] [Green Version]
- Fanibhare, V.; Sarkar, N.I.; Al-Anbuky, A. A survey of the tactile internet: Design issues and challenges, applications, and future directions. Electronics 2021, 10, 2171. [Google Scholar] [CrossRef]
- She, C.; Yang, C. Ensuring the quality-of-service of tactile internet. In Proceedings of the 2016 IEEE 83rd Vehicular Technology Conference (VTC Spring), Nanjing, China, 15–18 May 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Krasniqi, F.; Elias, J.; Leguay, J.; Redondi, A.E. End-to-end delay prediction based on traffic matrix sampling. In Proceedings of the IEEE INFOCOM 2020-IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Toronto, ON, Canada, 6–9 July 2020; pp. 774–779. [Google Scholar] [CrossRef]
- Rusek, K.; Suá rez-Varela, J.; Mestres, A.; Barlet-Ros, P.; Cabellos-Aparicio, A. Unveiling the potential of graph neural networks for network modeling and optimization in SDN. In Proceedings of the 2019 ACM Symposium on SDN Research, San Jose, CA, USA, 3–4 April 2019; pp. 140–151. [Google Scholar] [CrossRef] [Green Version]
- Malakar, P.; Balaprakash, P.; Vishwanath, V.; Morozov, V.; Kumaran, K. Benchmarking machine learning methods for performance modeling of scientific applications. In Proceedings of the 2018 IEEE/ACM Performance Modeling, Benchmarking and Simulation of High Performance Computer Systems (PMBS), Dallas, TX, USA, 12 November 2018; pp. 33–44. [Google Scholar] [CrossRef]
- Gouareb, R.; Friderikos, V.; Aghvami, A.H. Delay sensitive virtual network function placement and routing. In Proceedings of the 2018 25th international conference on telecommunications (ICT), Saint Malo, France, 26–28 June 2018; pp. 394–398. [Google Scholar] [CrossRef]
- Ravi, B.; Thangaraj, J. End-to-end delay bound analysis of VANETs based on stochastic method via queueing theory model. In Proceedings of the 2017 International Conference on Wireless Communications, Signal Processing and Networking (WiSPNET), Chennai, India, 22–24 March 2017; pp. 1920–1923. [Google Scholar] [CrossRef]
- Mathew, A.; Srinivasan, M.; Murthy, C.S.R. Network calculus based delay analysis for mixed fronthaul and backhaul 5G networks. In Proceedings of the 2020 IEEE 21st international symposium on “A World of Wireless, Mobile and Multimedia Networks” (WoWMoM), Cork, Ireland, 31 August–3 September 2020; pp. 205–214. [Google Scholar] [CrossRef]
- Van Bemten, A.; Kellerer, W. Network Calculus: A Comprehensive Guide. Technische Universitä t Mü nchen Lehrstuhl fü r Kommunikationsnetze, Technical Report No. 201603. 2016. Available online: http://mediatum.ub.tum.de/doc/1328613/375837.pdf (accessed on 10 December 2022).
- Kö hler, L. A Compositional Performance Analysis for Embedded Computing Systems with Weakly-Hard Real-Time Constraints. 2022. Available online: https://leopard.tu-braunschweig.de/receive/dbbs_mods_00071234 (accessed on 10 December 2022).
- Boyer, M.; Roux, P. Embedding network calculus and event stream theory in a common model. In Proceedings of the 2016 IEEE 21st International Conference on Emerging Technologies and Factory Automation (ETFA), Berlin, Germany, 6–9 September 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Henia, R.; Hamann, A.; Jersak, M.; Racu, R.; Richter, K.; Ernst, R. System level performance analysis–the SymTA/S approach. IEE Proc.-Comput. Digit. Tech. 2005, 152, 148–166. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Chen, L.; Wang, T.; Wang, X. Analysis of TSN for industrial automation based on network calculus. In Proceedings of the 2019 24th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Zaragoza, Spain, 10–13 September 2019; pp. 240–247. [Google Scholar] [CrossRef]
- Miao, W.; Min, G.; Wu, Y.; Huang, H.; Zhao, Z.; Wang, H.; Luo, C. Stochastic performance analysis of network function virtualization in future Internet. IEEE J. Sel. Areas Commun. 2019, 37, 613–626. [Google Scholar] [CrossRef] [Green Version]
- Zhao, L.; Pop, P.; Zheng, Z.; Li, Q. Timing analysis of AVB traffic in TSN networks using network calculus. In Proceedings of the 2018 IEEE Real-Time and Embedded Technology and Applications Symposium (RTAS), Porto, Portugal, 11–13 April 2018; pp. 25–36. [Google Scholar] [CrossRef]
- Maile, L.; Hielscher, K.; German, R. Network calculus results for TSN: An introduction. In Proceedings of the 2020 Information Communication Technologies Conference (ICTC), Nanjing, China, 29–31 May 2020; pp. 131–140. [Google Scholar] [CrossRef]
- Chen, Y.; Liao, K.; Chen, Y. End-to-end delay analysis in aerial-terrestrial heterogeneous networks. IEEE Trans. Veh. Technol. 2021, 70, 1793–1806. [Google Scholar] [CrossRef]
- Maier, M.; Ebrahimzadeh, A. Towards immersive tactile internet experiences: Low-latency FiWi enhanced mobile networks with edge intelligence. J. Opt. Commun. Netw. 2019, 11, B10–B25. [Google Scholar] [CrossRef]
- Kim, K.S.; Kim, D.K.; Chae, C.B.; Choi, S.; Ko, Y.C.; Kim, J.; Lim, Y.G.; Yang, M.; Kim, S.; Lim, B.; et al. Ultrareliable and low-latency communication techniques for tactile internet services. Proc. IEEE 2018, 107, 376–393. [Google Scholar] [CrossRef] [Green Version]
- Aijaz, A. Towards 5G-enabled tactile internet: Radio resource allocation for haptic communications. In Proceedings of the 2016 IEEE Wireless Communications and Networking Conference(WCNC), Doha, Qatar, 3–6 April 2016; pp. 145–150. [Google Scholar] [CrossRef]
- Georges, J.P.; Divoux, T.; Rondeau, É. Network calculus: Application to switched real-time networking. In Proceedings of the 5th International ICST Conference on Performance Evaluation Methodologies and Tools, Paris, France, 16–20 May 2011; pp. 399–407. [Google Scholar] [CrossRef]
- Yang, H.; Cheng, L.; Ma, X. Bounding network-induced delays for time-critical services in avionic systems using measurements and network calculus. In Proceedings of the 10th ACM/IEEE International Conference on Cyber-Physical Systems, Montreal, QC, Canada, 16–18 April 2019; pp. 338–339. [Google Scholar] [CrossRef]
- Zhang, L.; Chen, X.; Xiang, X.; Wan, J. A stochastic network calculus approach for the end-to-end delay analysis of LTE networks. In Proceedings of the 2011 International Conference on Selected Topics in Mobile and Wireless Networking, Shanghai, China, 10–12 October 2011; pp. 30–35. [Google Scholar] [CrossRef]
- De Azua, J.A.R.; Boyer, M. Complete modelling of AVB in network calculus framework. In Proceedings of the 22nd International Conference on Real-Time Networks and Systems, Versaille, France, 8–10 October 2014; pp. 55–64. [Google Scholar] [CrossRef]
- Geyer, F.; Carle, G. Network engineering for real-time networks: Comparison of automotive and aeronautic industries approaches. IEEE Commun. Mag. 2016, 54, 106–112. [Google Scholar] [CrossRef]
- Duan, Q. Modeling and performance analysis for service function chaining in the SDN/NFV architecture. In Proceedings of the 2018 4th IEEE Conference on Network Softwarization and Workshops (NetSoft), Concordia University, Montreal, QC, Canada, 25–29 June 2018; pp. 476–481. [Google Scholar] [CrossRef]
- Hu, H.; Li, Q.; Xiong, H.; Fang, B. The delay bound analysis based on network calculus for asynchronous traffic shaping under parameter inconsistency. In Proceedings of the 2020 IEEE 20th International Conference on Communication Technology (ICCT), Nanning, China, 28–31 October 2020; pp. 908–915. [Google Scholar] [CrossRef]
- Ren, Q.; Liu, K.; Zhang, L. Multi-objective optimization for task offloading based on network calculus in fog environments. Digit. Commun. Netw. 2021, 8, 829–837. [Google Scholar] [CrossRef]
- Simsek, M.; Aijaz, A.; Dohler, M.; Sachs, J.; Fettweis, G. 5G-enabled tactile internet. IEEE J. Sel. Areas Commun. 2016, 34, 460–473. [Google Scholar] [CrossRef] [Green Version]
- Shi, X.; Feng, M.; He, G.; Li, S.; Jiang, T. A versatile experimental platform for tactile internet: Design guidelines and practical implementation. IEEE Netw. 2022. [Google Scholar] [CrossRef]
- Gupta, R.; Tanwar, S.; Tyagi, S.; Kumar, N. Tactile internet and its applications in 5G era: A comprehensive review. Int. J. Commun. Syst. 2019, 32, e3981. [Google Scholar] [CrossRef]
- Monnet, W.; Yahiya, T.A. HoIP performance for Tactile Internet over 5G networks: A teleoperation case study. In Proceedings of the 2020 11th International Conference on Network of the Future (NoF), Bordeaux, France, 12–14 October 2020; pp. 48–54. [Google Scholar] [CrossRef]
- Fidler, M.; Rizk, A. A guide to the stochastic network calculus. IEEE Commun. Surv. Tutor. 2014, 17, 92–105. [Google Scholar] [CrossRef]
- Al Ridhawi, I.; Aloqaily, M.; Karray, F.; Guizani, M.; Debbah, M. Realizing the tactile internet through intelligent zero touch networks. IEEE Netw. 2022. [Google Scholar] [CrossRef]
- Beniiche, A.; Ebrahimzadeh, A.; Maier, M. The way of the DAO: Toward decentralizing the tactile internet. IEEE Netw. 2021, 35, 190–197. [Google Scholar] [CrossRef]
- Duan, Q. Modeling and performance analysis for composite network–compute service provisioning in software-defined cloud environments. Digit. Commun. Netw. 2015, 1, 181–190. [Google Scholar] [CrossRef] [Green Version]
- Le Boudec, J.Y.; Thiran, P. Network Calculus: A Theory of Deterministic Queuing Systems for the Internet; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Ojewale, M.A.; Yomsi, P.M.; Nikolić, B. Worst-case traversal time analysis of tsn with multi-level preemption. J. Syst. Archit. 2021, 116, 102079. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Traffic Direction | Number of Flow(s) and Switch(es) | Variable Setting | |
|---|---|---|---|
| Case 1 | Master to Slave | 1 Flow and 1 Switch | Haptic arrival rate: 1–4 pkts/s |
| Haptic burst size: 12–48 B | |||
| Case 2 | Slave to Master | 3 Flows and 1 Switch | Video arrival rate: 1–100 Mbps |
| Audio arrive rate: 5–512 Kbps | |||
| Case 3 | Master to Slave | 1 Flow and N Switches | Haptic burst size: 12–48 B |
| Number of switches: 2–6 | |||
| Case 4 | Slave to Master | 3 Flows and N Switches | Video arrival rate: 1–100 Mbps |
| Audio arrive rate: 5–512 Kbps | |||
| Number of switches: 2–6 |
| Case 1 | Case 2 | Case 3 | Case 4 | |
|---|---|---|---|---|
| RMSE | 5.64 | 8.34 | 2.32 | 2.11 |
| MSE | 3.18 | 6.95 | 5.40 | 4.46 |
| MAE | 5.00 | 8.34 | 2.00 | 2.03 |
| 99.99% | 99.73% | 99.99% | 96.51% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Q.; Mo, Z.; Yin, B.; Zhang, L.; Dong, P. Bounding the Upper Delays of the Tactile Internet Using Deterministic Network Calculus. Electronics 2023, 12, 21. https://doi.org/10.3390/electronics12010021
Wang Q, Mo Z, Yin B, Zhang L, Dong P. Bounding the Upper Delays of the Tactile Internet Using Deterministic Network Calculus. Electronics. 2023; 12(1):21. https://doi.org/10.3390/electronics12010021
Chicago/Turabian StyleWang, Qian, Ziying Mo, Benle Yin, Lianming Zhang, and Pingping Dong. 2023. "Bounding the Upper Delays of the Tactile Internet Using Deterministic Network Calculus" Electronics 12, no. 1: 21. https://doi.org/10.3390/electronics12010021