
Adaptive Motion Skill Learning of Quadruped Robot on Slopes Based on Augmented Random Search Algorithm

 ,
, 
Abstract
:1. Introduction
- (1)
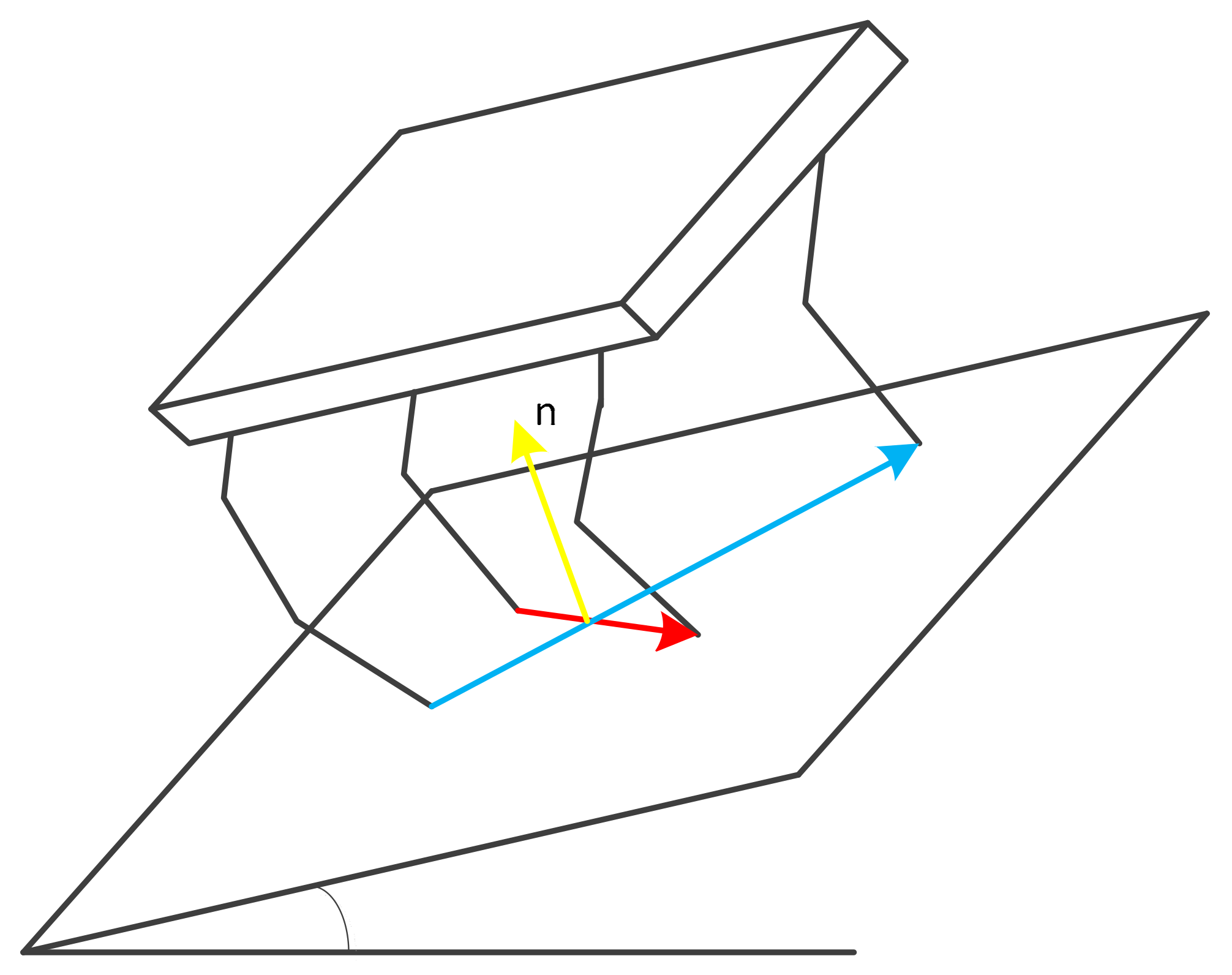
- An algorithm for estimating unknown terrain slope based on the coordinates of the foot endpoint is proposed;
- (2)
- We parameterized the foot end trajectory of the quadruped robot based on the Bezier curve to improve the training speed of the robot;
- (3)
- The ARS algorithm was used to optimize the trajectory of the foot end, and the adaptive adjustment of the robot posture is realized.
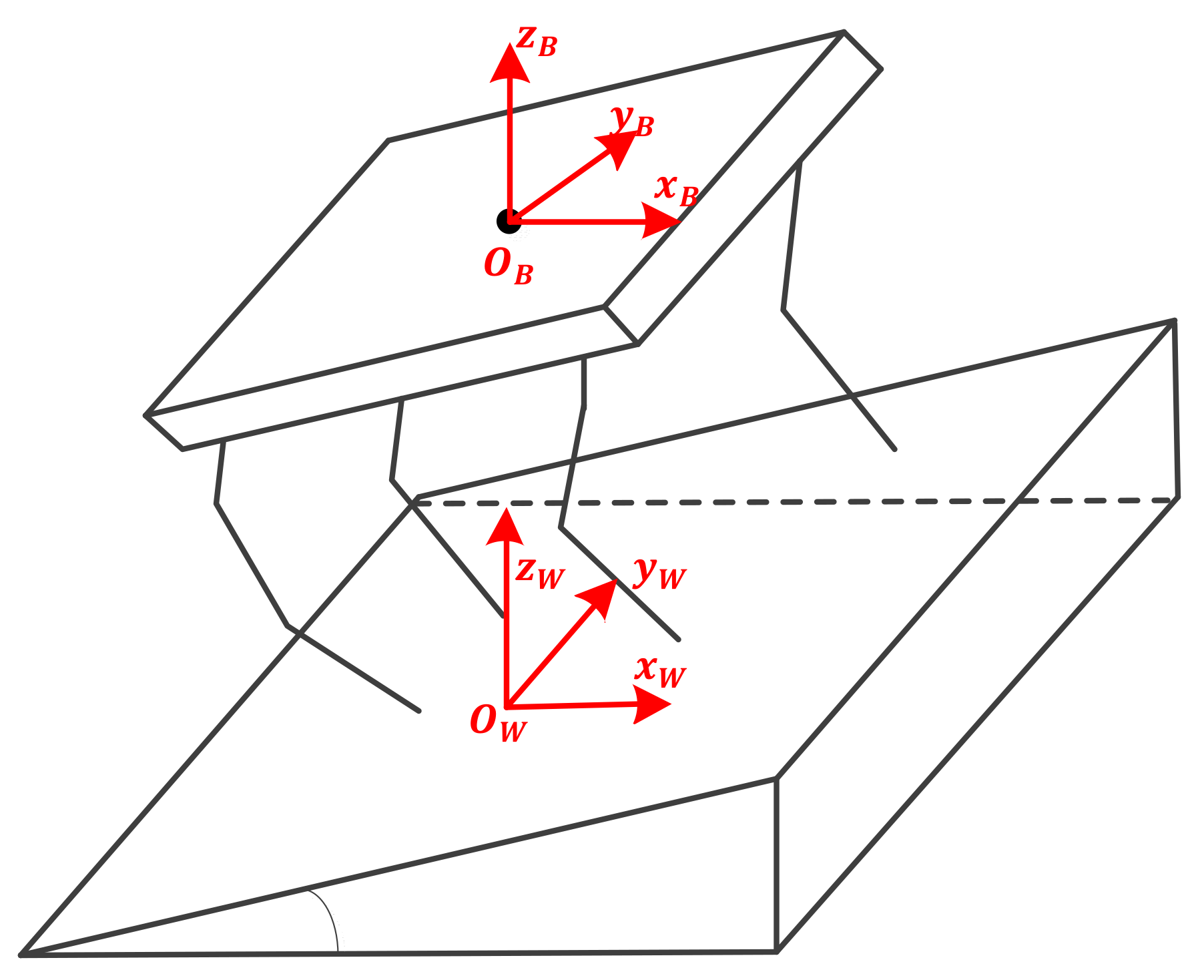
2. Robot Model and Terrain Slope Estimation Algorithm
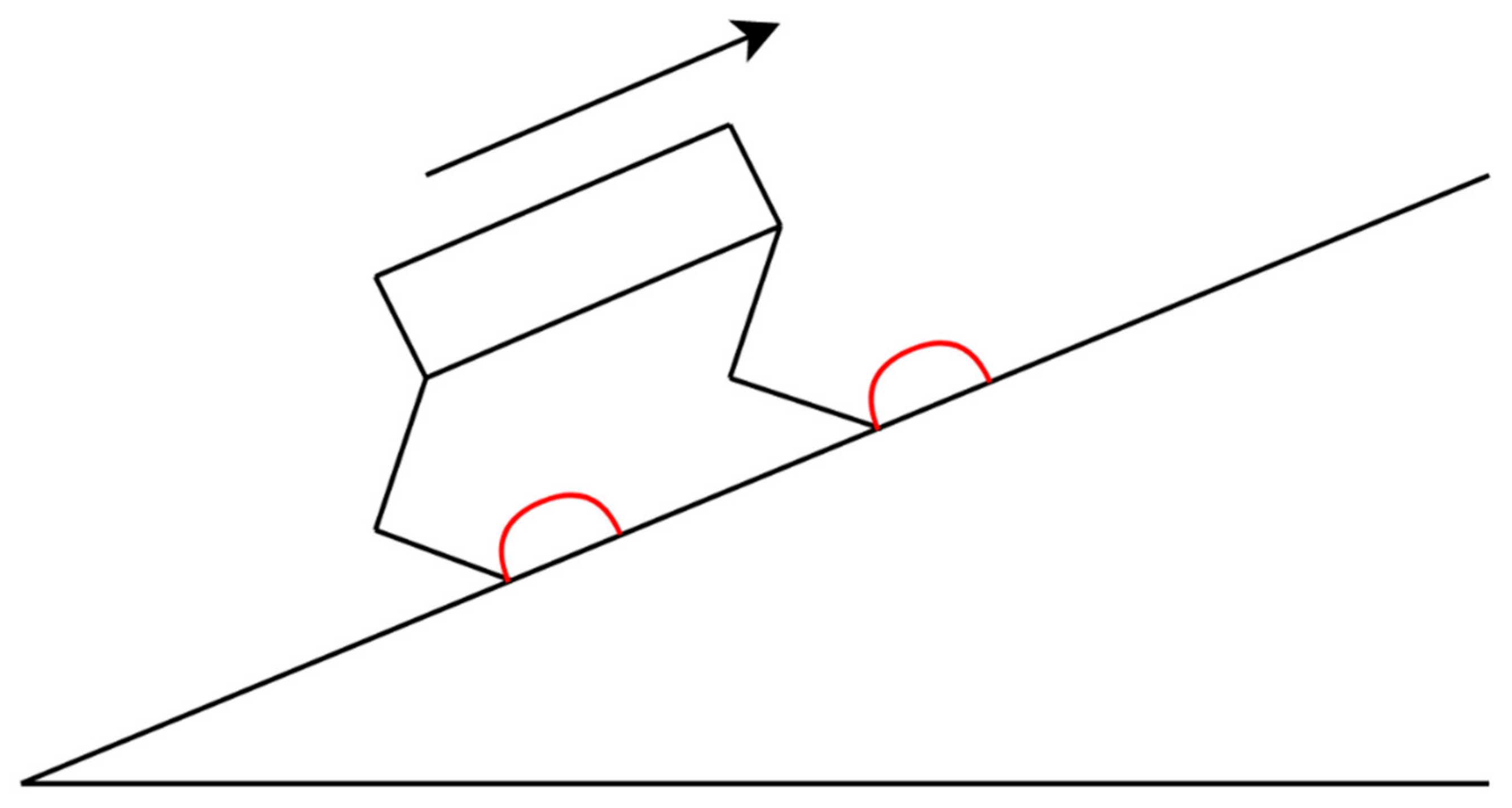
2.1. Model of a Robot on a Slope
2.2. Terrain Slope Estimation
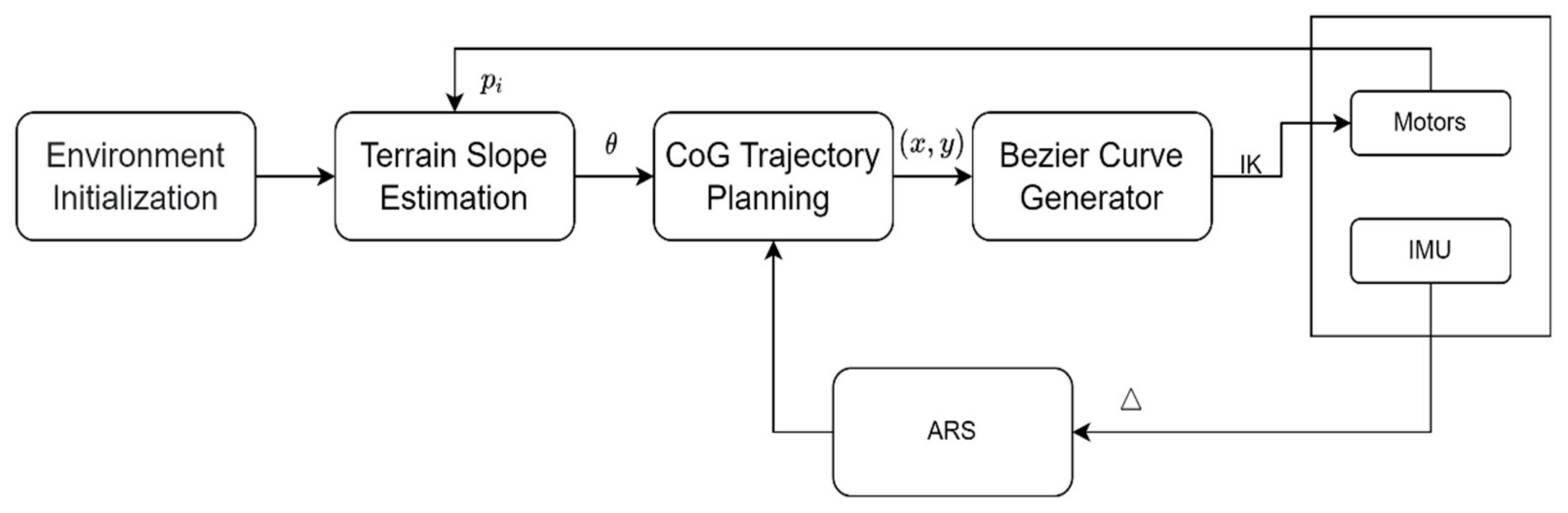
3. Control Architecture
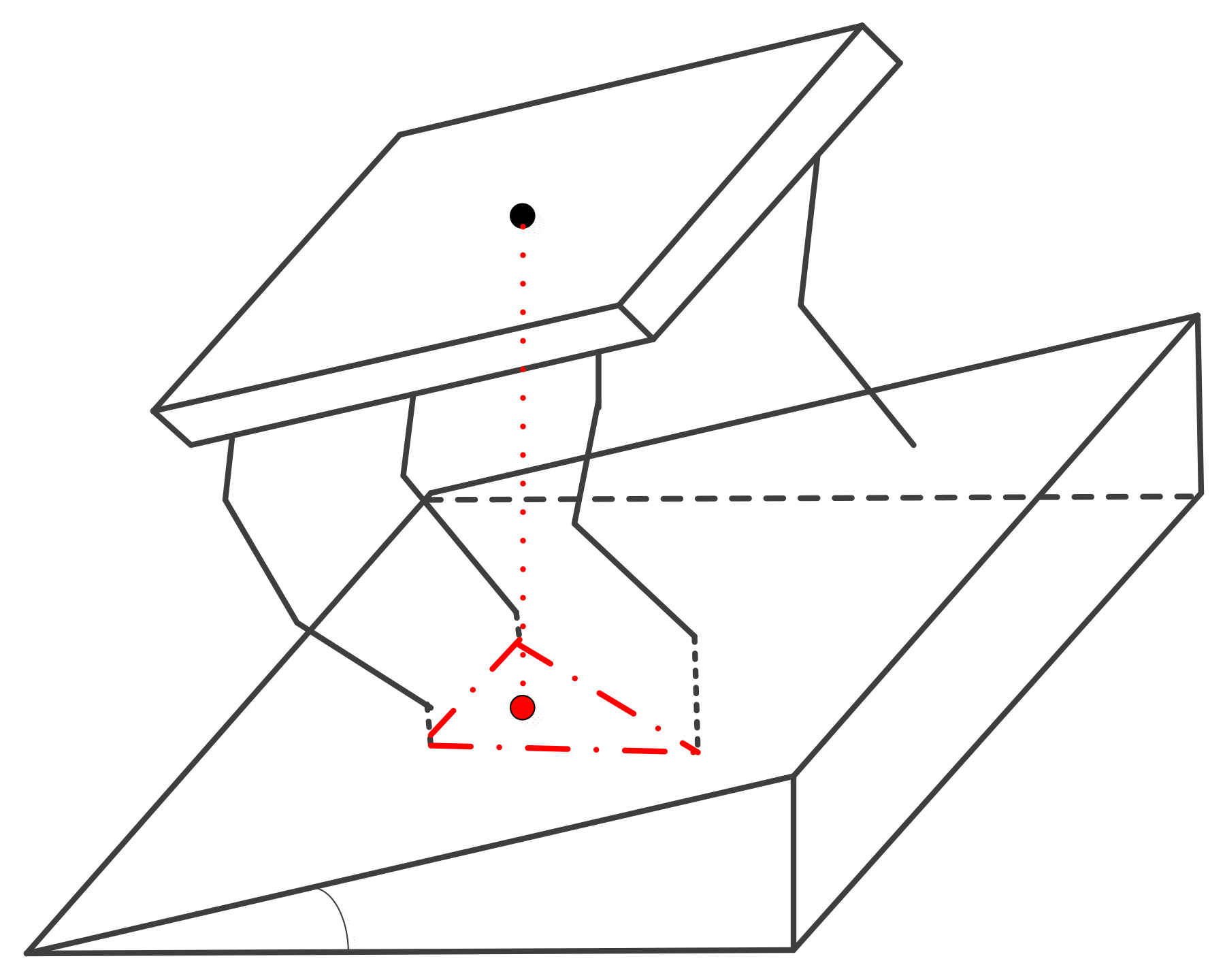
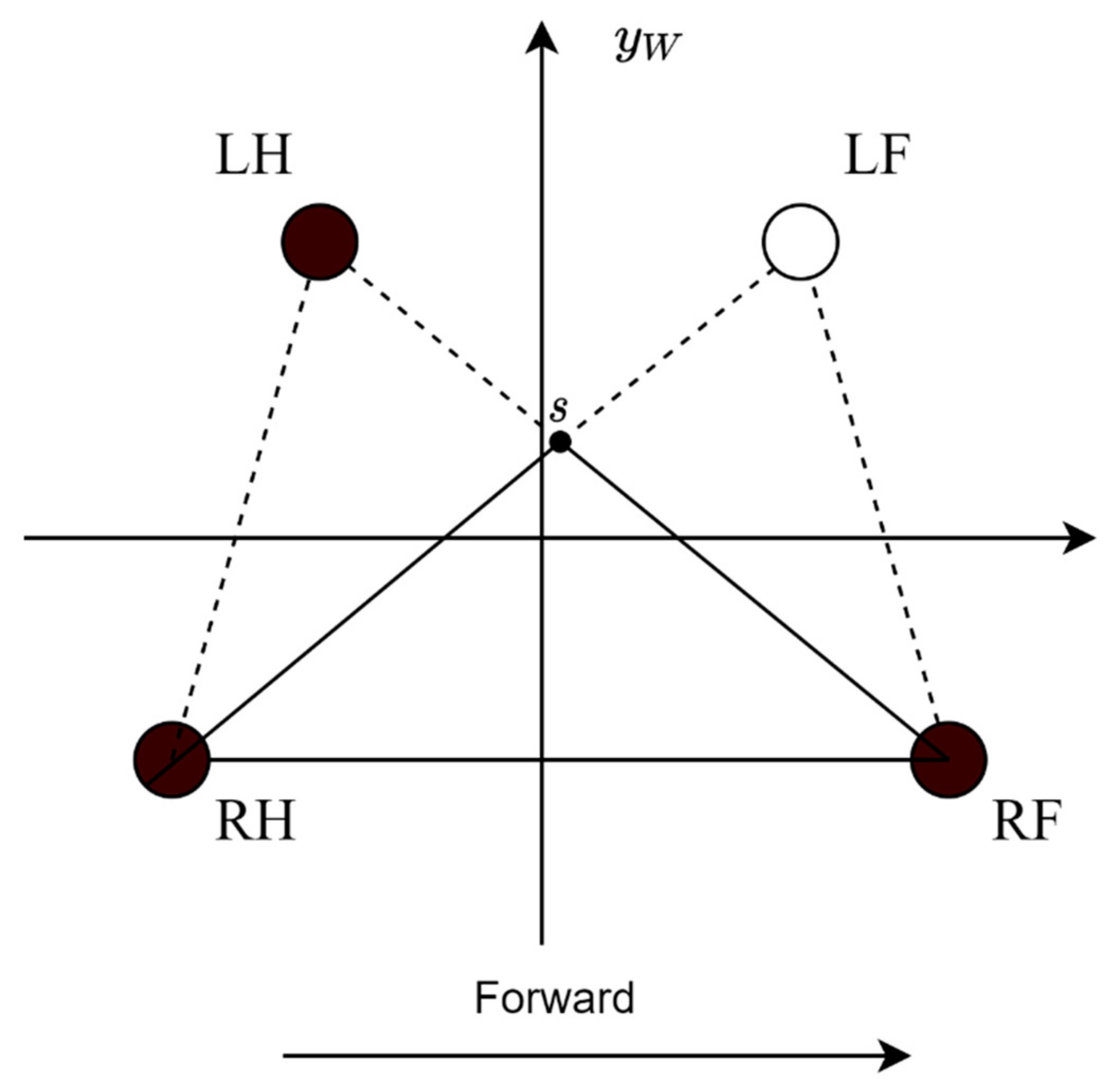
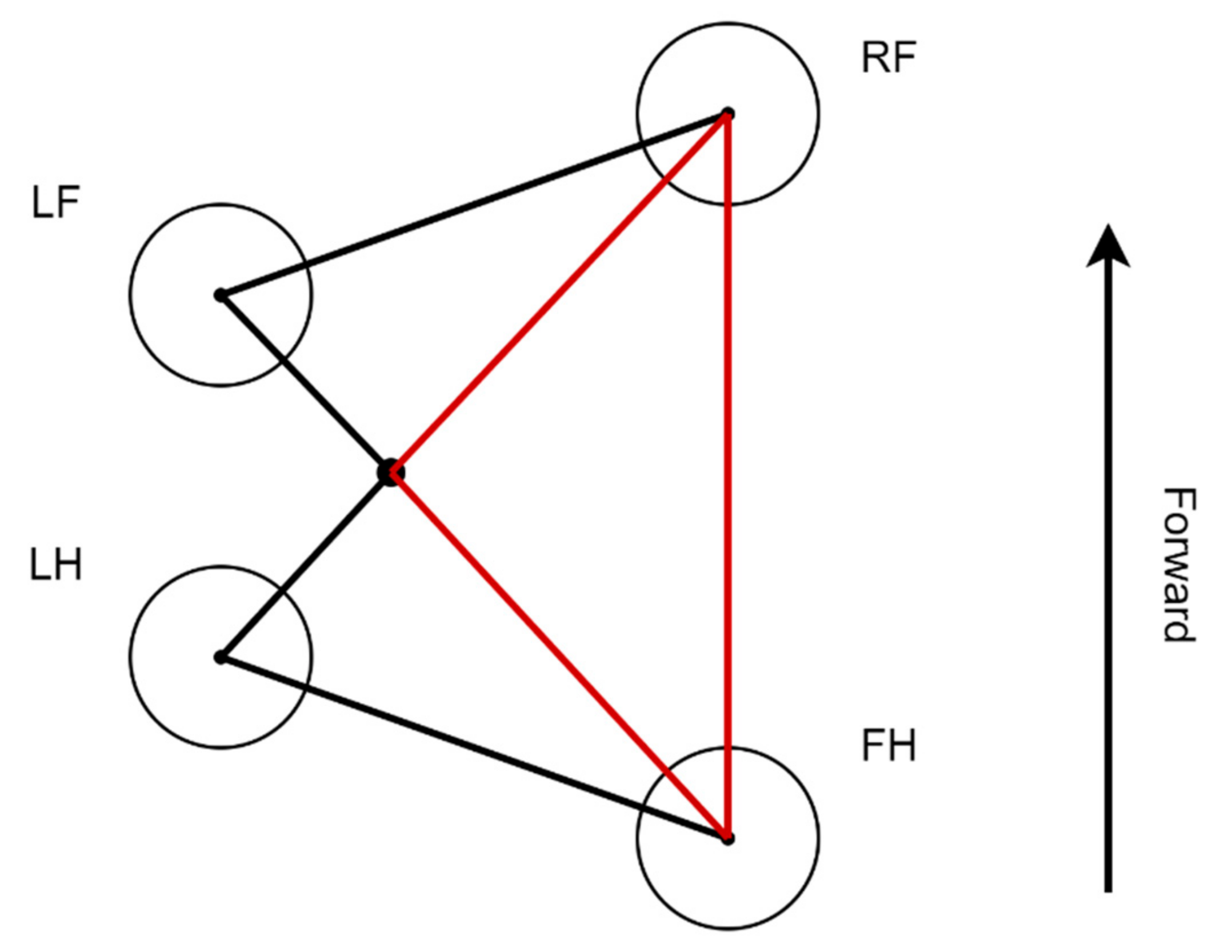
3.1. Zero-Moment Point
3.2. Center of Gravity Trajectory Generator
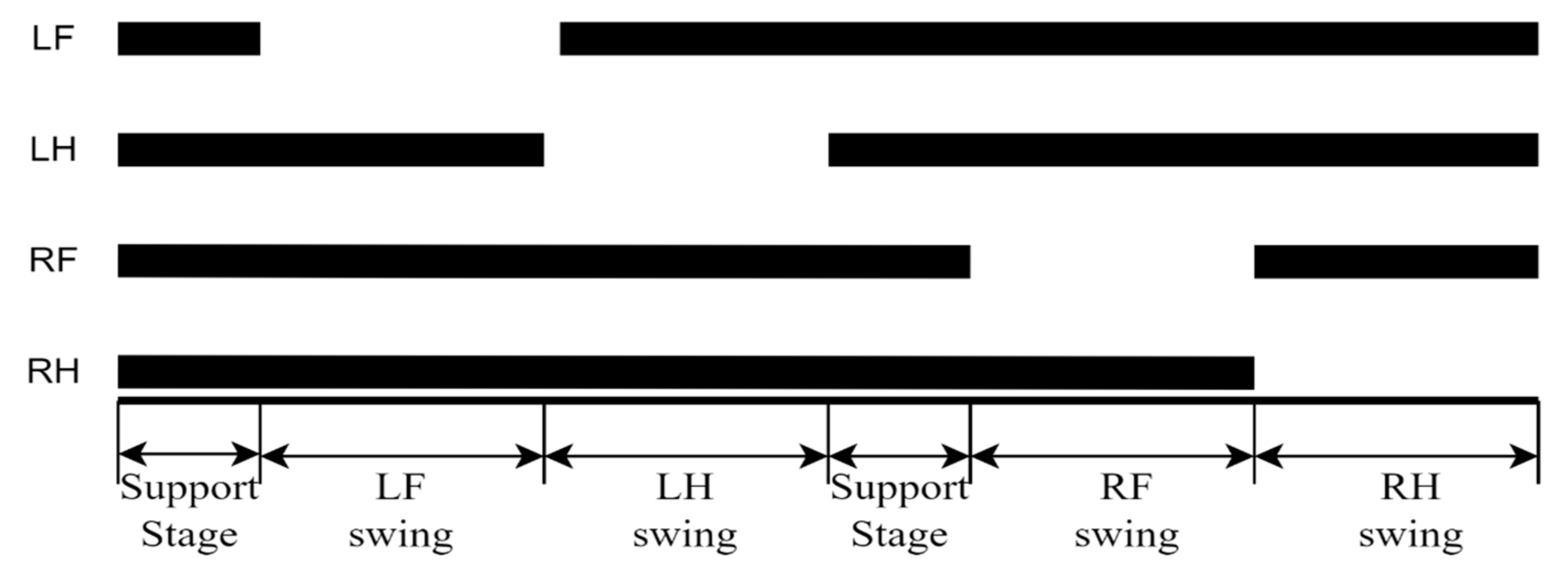
3.3. Gait Planner
3.4. Foot Trajectory Planner
3.5. Training Algorithm
4. Results and Discussion
4.1. Simulation Environment
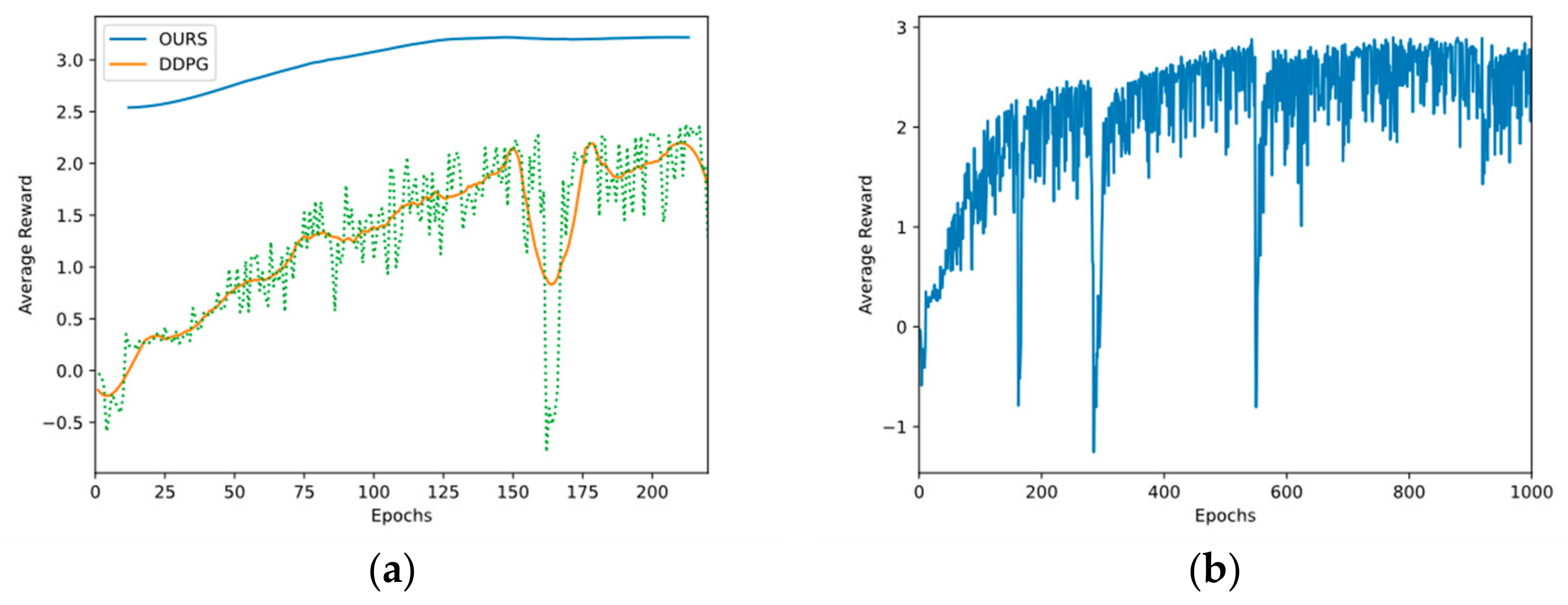
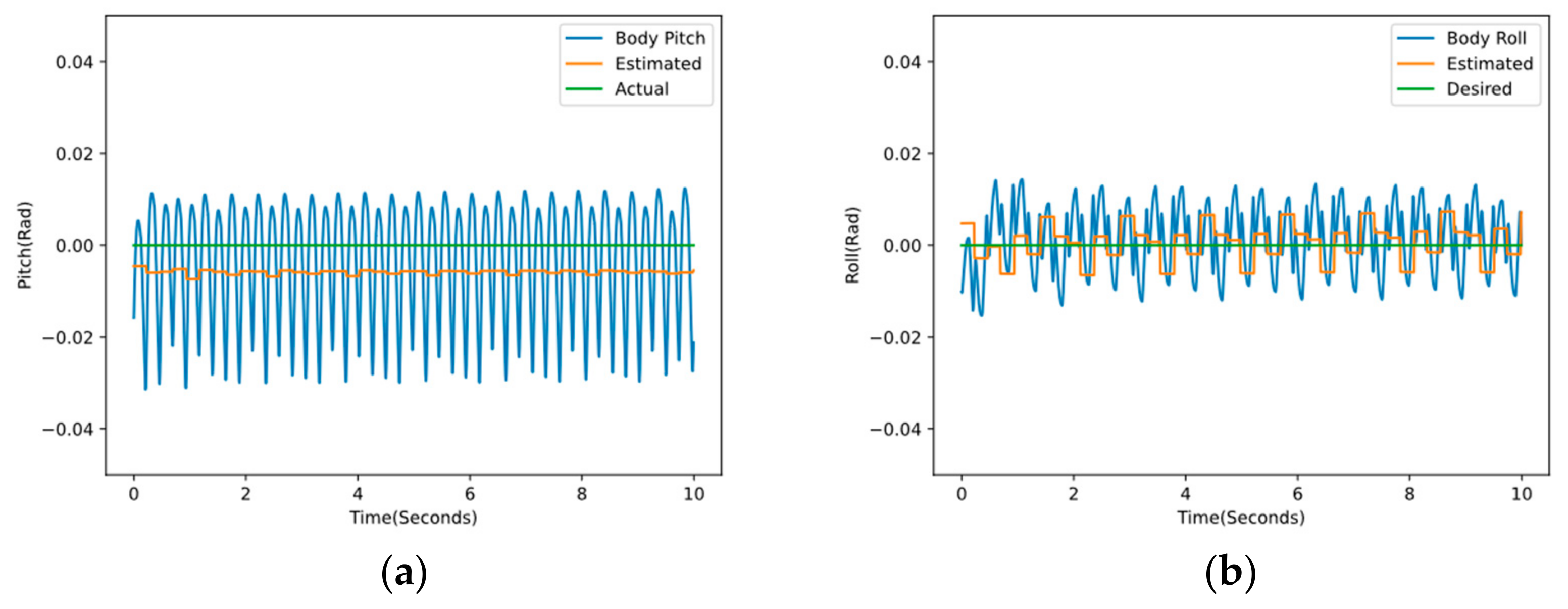
4.2. Results and Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yang, J.; Sun, H.; Wang, C.; Chen, X. An Overview of Quadruped Robots. Navig. Position. Timing 2019, 6, 61–73. [Google Scholar]
- Mcghee, R.B.; Frank, A. On the stability properties of quadruped creeping gaits. Math. Biosci. 1968, 3, 331–351. [Google Scholar] [CrossRef]
- Hwang, H.; Youm, Y. Steady crawl gait generation algorithm for quadruped robots. Adv. Robot. 2008, 23, 1539–1558. [Google Scholar] [CrossRef]
- Kalakrishnan, M.; Jonas, B.; Peter, P.; Michael, N.M.; Stefan, S. Learning, planning, and control for quadruped locomotion over challenging terrain. Int. J. Robot. Res. 2011, 30, 236–258. [Google Scholar] [CrossRef]
- Ijspeert, A.J. Central pattern generators for locomotion control in animals and robots: A review. Neural Netw. 2008, 21, 642–653. [Google Scholar] [CrossRef] [PubMed]
- Montesdeoca, J.C.; Santos, M.C.P.; Monllor, M.; Herrera, D. Trajectory tracking controller for differential-drive mobile robots. In Proceedings of the 2017 XVII Workshop on Information Processing and Control (RPIC), Mar del Plata, Argentina, 20–22 September 2017; pp. 1–4. [Google Scholar]
- Kimura, H.; Yasuhiro, F.; Cohen, A.H. Adaptive Dynamic Walking of a Quadruped Robot on Natural Ground Based on Biological Concepts. Int. J. Robot. Res. 2007, 26, 475–490. [Google Scholar] [CrossRef]
- Gehring, C.; Bellicoso, C.D.; Coros, S.; Bloesch, M.; Fankhauser, P.; Hutter, M.; Siegwart, R. Dynamic trotting on slopes for quadrupedal robots. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 5129–5135. [Google Scholar]
- Kohl, N.; Peter, S. Policy gradient reinforcement learning for fast quadrupedal locomotion. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; Volume 3, pp. 2619–2624. [Google Scholar]
- Iscen, A.; Caluwaerts, K.; Tan, J.; Zhang, T.; Coumans, E.; Sindhwani, V.; Vanhoucke, V. Policies Modulating Trajectory Generators. arXiv 2019, arXiv:1910.02812. [Google Scholar]
- Lee, J.; Jemin, H.; Lorenz, W.; Vladlen, K.; Marco, H. Learning quadrupedal locomotion over challenging terrain. Sci. Robot. 2020, 5, eabc5986. [Google Scholar] [CrossRef] [PubMed]
- Vukobratovic, M.; Borovac, B. Zero-moment point: Thirty five years of its life. Int. J. Hum. Robot. 2004, 1, 157–173. [Google Scholar] [CrossRef]
- Kajita, S.; Fumio, K.; Kenji, K.; Kiyoshi, F.; Kensuke, H.; Kazuhito, Y.; Hirohisa, H. Biped walking pattern generation by using preview control of zero-moment point. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation (Cat. No.03CH37422), Taipei, Taiwan, 14–19 September 2003; Volume 2, pp. 1620–1626. [Google Scholar]
- Wei, Y.; Zhou, C.; Guo, J.; Xu, P. CPG-based Stable Walking Control of the Quadruped Robot on the Slope. Control. Eng. China 2021, 28. [Google Scholar] [CrossRef]
- Tirumala, S.; Sagi, A.; Paigwar, K.; Joglekar, A.; Bhatnagar, S.; Ghosal, A.; Kolathaya, S. Gait Library Synthesis for Quadruped Robots via Augmented Random Search. arXiv 2019, arXiv:1912.12907. [Google Scholar]
- Paigwar, K.; Krishna, L.; Tirumala, S.; Khetan, N.; Sagi, A.; Joglekar, A.; Kolathaya, S. Robust Quadrupedal Locomotion on Sloped Terrains: A Linear Policy Approach. arXiv 2020, arXiv:2010.16342. [Google Scholar]
- Chen, C.; He, Y.-Q.; Bu, C.-G.; Han, J.-D. Feasible trajectory generation for autonomous vehicles based on quartic B’ezier curve. Acta Autom. Sin. 2015, 41, 486–496. [Google Scholar]
- Tirumala, S.; Gubbi, S.; Paigwar, K.; Sagi, A.; Joglekar, A.; Bhatnagar, S.; Kolathaya, S. Learning stable manoeuvres in quadruped robots from expert demonstrations. In Proceedings of the 2020 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), Naples, Italy, 31 August–4 September 2020; pp. 1107–1112. [Google Scholar]
- Sewak, M. Deep Reinforcement Learning: Frontiers of Artificial Intelligence; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar] [CrossRef]
- Mania, H.; Aurelia, G.; Benjamin, R. Simple random search of static linear policies is competitive for reinforcement learning. Adv. Neural Inf. Processing Syst. 2018, 31. Available online: https://proceedings.neurips.cc/paper/2018/hash/7634ea65a4e6d9041cfd3f7de18e334a-Abstract.html (accessed on 5 March 2022).
- Guizzo, E. This Robotics Startup Wants To Be the Boston Dynamics of China. Available online: https://spectrum.ieee.org/automaton/robotics/robotics-hardware/this-robotics-startup-wants-to-be-the-boston-dynamics-of-china (accessed on 5 March 2022).
- Coumans, E.; Bai, Y. Pybullet, a Python Module for Physics Simulation for Games, Robotics and Machine Learning. Available online: http://pybullet.org/wordpress/ (accessed on 5 March 2022).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pi | X | Y |
|---|---|---|
| 0 | xp | yp |
| 1 | −0.05 (xd − xp) | yp |
| 2 | −3 (xd − xp) | 0.9 (yp − yd) |
| 3 | xp | 1.1 (yp + yd) |
| 4 | 0.5 (xd − xp) | 1.2 (yp + yd) |
| 5 | (xd − xp) | 1.1 (yp + yd) |
| 6 | 1.1 (xd − xp) | 0.09 (yp + yd) |
| 7 | 1.05 (xd − xp) | yd |
| 8 | xd | yd |
| Actual Value | Average Value | Standard Error | Maximum Deviation | |
|---|---|---|---|---|
| E-Pitch | 0 | −0.005894 | 0.000013 | −0.007399 |
| E-Roll | 0 | 0.000543 | 0.000108 | 0.007371 |
| Average Value | Standard Deviation | Maximum | |
|---|---|---|---|
| R-Pitch | −0.003629 | 0.012690 | −0.031460 |
| R-Roll | 0.001382 | 0.007026 | −0.015340 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, X.; Wang, M.; Ruan, X.; Chen, L.; Ji, T.; Liu, X. Adaptive Motion Skill Learning of Quadruped Robot on Slopes Based on Augmented Random Search Algorithm. Electronics 2022, 11, 842. https://doi.org/10.3390/electronics11060842
Zhu X, Wang M, Ruan X, Chen L, Ji T, Liu X. Adaptive Motion Skill Learning of Quadruped Robot on Slopes Based on Augmented Random Search Algorithm. Electronics. 2022; 11(6):842. https://doi.org/10.3390/electronics11060842
Chicago/Turabian StyleZhu, Xiaoqing, Mingchao Wang, Xiaogang Ruan, Lu Chen, Tingdong Ji, and Xinyuan Liu. 2022. "Adaptive Motion Skill Learning of Quadruped Robot on Slopes Based on Augmented Random Search Algorithm" Electronics 11, no. 6: 842. https://doi.org/10.3390/electronics11060842